A tactile-sensing apparatus for minimally invasive
Recommend Documents
Mar 19, 2013 - The instant invention is a novel method for construct for temporary or .... the threaded rod a?ixed to the second ilium; and tightening the second ...
Jun 24, 2014 - Retrieving Single Adherent Cells of. Different Types from Cultures. Jia Zeng*, Aida Mohammadreza, Weimin Gao, Saeed Merza, Dean Smith, ...
Oct 25, 2008 - Philippe Nafteux a, Dirk Van Raemdonck a, Toni Lerut a ...... [62] Thompson AM, Rapson T, Gilbert FJ, Park KGM, the Scottish Audit of.
of pediatric cardiac tamponade â one center's experience. Ireneusz .... Another critically ill baby girl re ..... neonate with unexplained fetal pericardial effusion.
Mar 7, 2018 - The biggest benefit of MIE is avoidance of thoracotomy / laparotomy ... in the posterior axillary line in 2nd and 7th intercostals space, and the ...
experiência dos operadores, resultou em procedimentos mais seguros e com melhores resultados. O primeiro dispositivo de segunda geração aprovado no ...
drainage are the standard procedure for identifying causative pathogens. However ... and drainage provide a minimally invasive surgical choice for the treatment ...
generated forces are characterized through experimental tests. The combination of stiffening capabilities and manipulation tasks is also addressed to confirm the manipulator ... In particular, the study of how animals use soft body parts to move in .
ileal conduit, colon conduit, ileal orthotopic neobladder in 19, 4, and 3 ... Radical cystectomy followed by urinary ... derwent cystectomy and urinary diversion.
This study evaluates the safety and effectiveness of computed tomography- (CT-) assisted endoscopic surgery in the treatment of infectious spondylodiscitis of ...
fluid, (MIET) minimally invasive interstitial fluid extraction technology, (OGTT) oral glucose tolerance test, ... treated type 2 DM patients because of the requirement to insert needles and use blood samples for calibration, which is ..... Diabetes
evidenĺiate manual cu ajutorul programului Corel Draw, astfel fiind posibilÄ o identificare ... A Modern Minimally Invasive Transcallosal Approach to the Third Ventricle. A personal .... immediately operate or to postpone the surgery, operative ...
those who develop instability in the process of decompressing neural compression, lumbar interbody ... rent shortcomings of minimally invasive PLIF surgery. The purpose of this ..... Chou R, Atlas SJ, Stanos SP, Rosenquist RW. Nonsurgical ...
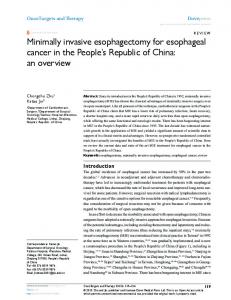
Keywords: esophagectomy, minimally invasive esophagectomy, esophageal ..... pharyngo-laryngo-esophagectomy: total laparoscopic and hand-assisted.
coated with 800 nm of silicon dioxide which works as a mask for later etching of ... The lens mold and the silicon substrate are aligned with each other and held.
Jun 11, 2018 - Although decompressive surgery is effective, older patients do not benefit ... underwent lumbar decompressive surgery by the senior author over the past five years. We ..... 10.1097/BRS.0000000000000355. 8. ... 25. Reiman MP, Harris JY
The field of Minimally Invasive Surgery or Minimally Access Surgery (MAS) as it is commonly ... In addition to these, new techniques, procedures and innovations are always ongoing in ..... theatre layout will change to accommodate this newer.
nori Kanemitsu, Kimihiro Yamashita, Yasuo Sumi, Satoshi Suzuki, Yoshi- hiro Kakeji. Graduate ...... Iwata City Hospital, Iwata/JAPAN. Background: Repeated ...
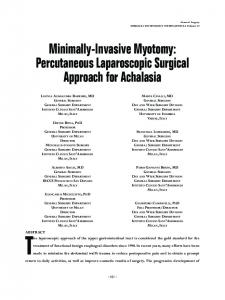
cardiomyotomy is only performed on the anterior side of the esophagus and, to reduce the incidence of postoperative reflux, it is usually associated with a par-.
Nov 18, 1999 - Conversion to thoracotomy was required in five cases: in one patient due to ... mid-axillary line between the sixth and eighth intercostal spaces.
Mini Dental Implant use minimally invasive procedures appreciated from clinicians and patients. M.I.P. ( Micerium Implant Planning ®) takes the best advantages ...
Resurfacing/skin care: ⢠âLotions and potionsâ, laser, dermabrasion, chemical peels. ⢠Effective. ⢠Modest cos
Web resultsMinimally Invasive Therapies for Female Stress ... - CORE › publication › fulltext › Minimally... › publication › fulltext › Minimally...2009 · Cited by 14 · Related articlesCrivellaro/Smith: New Therapies for Female Stress Urinary Incon
Minimally invasive local therapies for liver cancer › publication › fulltext › Minimally... › publication › fulltext › Minimally...by D Li · 2014 · Cited by 81 · Related articlesmutually exclusive and there is extensive reported evidence on the ro
A tactile-sensing apparatus for minimally invasive
5. 4. 1. 2. 6. 7. Fig. 3 1- Elastic element 2-rope 3-Indicative objects 4-sensor 5-The first roller group. 6 The second roller group 7- Accessory 8-the elastic element.
A tactile‐sensing apparatus for minimally invasive surgery Human’s finger-tip has a soft, flexible skin to feel the contact force. So A tactile sensing MIS instrument is developed to mimic human’s finger-tip. The elastics cover the surface of the accessory (e.g. forceps), just like the skin covering the bone.
Fig. 1 The principle of the tactile‐sensing apparatus
When tissue of organs is grasped, the elastics will deform. The deformation will be converted into the pressure on the stain gauges (or the movement of indicative object). The signal of pressure (movement) can be used for recognition of the grasping force.
Fig.2 The schematic graph of the tactile‐sensing apparatus Two types of implementation: 7
5 2
3
Type I
8
1 6
4
Fig. 3 1- Elastic element
2-rope 3-Indicative objects
4-sensor 5-The first roller group
6 The second roller group 7- Accessory 8-the elastic element 1
7
5
3
Type II 8 2 4
Fig. 4
1- Liquid bladder 2-rope 3-Indicative objects
6
4-sensor 5-The first roller group
6 The second roller group 7- Accessory 8- Liquid bladder
The structure for ” Type I” mechanism: When rotational joints work, the cable will bend around the circumference of the roller. But the variation can be compensated in the algorithm.