bedanken voor de financiële ondersteuning van dit studieverblijf, alsook het. - toen nog ...... The mode extraction from coupled FE/BE models with an algebraic.
KATHOLIEKE UNIVERSITEIT LEUVEN FACULTEIT TOEGEPASTE WETENSCHAPPEN DEPARTEMENT WERKTUIGKUNDE AFDELING PRODUCTIETECHNIEKEN, MACHINEBOUW EN AUTOMATISERING Celestijnenlaan 300B – B-3001 Heverlee (Leuven), Belgium
A WAVE BASED PREDICTION TECHNIQUE FOR COUPLED VIBRO-ACOUSTIC ANALYSIS
Promotoren : Prof. dr. ir. P. SAS Prof. dr. ir. D. VANDEPITTE
Proefschrift voorgedragen tot het behalen van het doctoraat in de toegepaste wetenschappen door Wim DESMET
98D12
December 1998
KATHOLIEKE UNIVERSITEIT LEUVEN FACULTEIT TOEGEPASTE WETENSCHAPPEN DEPARTEMENT WERKTUIGKUNDE AFDELING PRODUCTIETECHNIEKEN, MACHINEBOUW EN AUTOMATISERING Celestijnenlaan 300B – B-3001 Heverlee (Leuven), Belgium
A WAVE BASED PREDICTION TECHNIQUE FOR COUPLED VIBRO-ACOUSTIC ANALYSIS
Jury : Prof. dr. ir. R. Govaerts (voorzitter) Prof. dr. ir. P. Sas Prof. dr. ir. D. Vandepitte Prof. dr. ir. G. De Roeck Prof. dr. ir. J.P. Coyette (UCL) Prof. P. Göransson (KTH Stockholm) Prof. dr. W. Lauriks Prof. dr. ir. G. Degrande
UDC 534.1
Proefschrift voorgedragen tot het behalen van het doctoraat in de toegepaste wetenschappen door Wim DESMET
December 1998
© Katholieke Universiteit Leuven - Faculteit Toegepaste Wetenschappen Arenbergkasteel, B-3001 Heverlee (Belgium) Alle rechten voorbehouden. Niets uit deze uitgave mag worden verveelvoudigd en/of openbaar gemaakt door middel van druk, fotokopie, microfilm, elektronisch of op welke andere wijze ook zonder voorafgaande schriftelijke toestemming van de uitgever. All rights reserved. No part of the publication may be reproduced in any form, by print, photoprint, microfilm or any other means without written permission from the publisher. D/1998/7515/51 ISBN 90-5682-151-2
DANKWOORD
Een doctoraat maak je nooit alleen. Dat heb ik gelukkig ook zelf mogen ervaren. Daarom wil ik graag iedereen bedanken die rechtstreeks of onrechtstreeks heeft bijgedragen tot dit werk. In de eerste plaats wil ik mijn beide promotoren oprecht bedanken voor de steun en het vertrouwen, die ze mij doorheen al de jaren gegeven hebben. Professor Sas wil ik van harte bedanken voor de ruimte die ik gekregen heb om me wetenschappelijk uit te leven, waarbij hij me met zijn inzicht en interesse de juiste sturing en motivering wist te geven, en voor de vele kansen die hij me gaf om dit werk aan een internationaal publiek voor te leggen. Mijn gevoel van tevredenheid en voldoening over dit werk heb ik ook in grote mate te danken aan professor Vandepitte. Hij was steeds bereid om met zijn klare en kritische kijk mee te denken aan dit project. Met zijn vele constructieve opmerkingen en nuttige suggesties, zijn enthousiasme en zijn aanmoedigingen heeft hij een belangrijke hand in dit werk. Voor dit alles, van harte dank. Tevens wil ik professor De Roeck bedanken omdat hij de tijd heeft willen vrijmaken om deze tekst grondig door te nemen en mee vorm te geven. Furthermore I would like to thank professor Göransson, not only for reading and evaluating my work as a member of the jury, but also for our interesting and pleasant co-operation during the BRAIN project. Ook professor
ii
Coyette, professor Lauriks en professor Degrande wil ik bedanken voor hun betoonde interesse als leden van de jury. Furthermore I would like to express my gratitude to professor Bolton and professor Bernhard from Purdue University for introducing me to the interesting world of poroelastic materials during my stay at the Ray W. Herrick laboratories. Hierbij wil ik het fonds “Prof. R. Snoeys Foundation” bedanken voor de financiële ondersteuning van dit studieverblijf, alsook het - toen nog - Nationaal Fonds voor Wetenschappelijk Onderzoek voor het toekennen van een vierjarig onderzoeksmandaat. Ook een welgemeend woordje van dank aan alle mensen van de afdeling PMA, en in het bijzonder van de ‘modale groep’, voor de wetenschappelijke, technische en administratieve ondersteuning en vooral voor de aangename werksfeer. Verder zou ik alle vrienden willen bedanken voor de vele plezante, en vaak memorabele, bele(u)venissen, waardoor de herinneringen aan de voorbije jaren steeds heel levendig zullen blijven. Tot slot wil ik mijn familie bedanken. Hun vele bemoedigende woorden tijdens de soms moeilijke momenten hebben me veel deugd gedaan. Hierbij wil ik vooral mijn ouders bedanken ... voor alles! Heel in het bijzonder wil ik Leen bedanken voor haar liefdevol begrip en haar geduldige steun, die ervoor gezorgd hebben dat ik dit werk tot een goed einde heb kunnen brengen. Aan haar wil ik dan ook graag dit werk opdragen.
ABSTRACT
This dissertation presents a new, wave based prediction technique for the steady-state dynamic analysis of coupled vibro-acoustic systems. The technique is based on a Trefftz approach, in which the field variables are expanded in terms of structural and acoustic wave functions, which are homogeneous solutions of the governing dynamic equations, along with some particular solution functions. In this way, the dynamic equations are exactly satisfied, irrespective of the contributions of the wave functions to the field variable expansions. These contributions result from a weighted residual or a least-squares formulation of the boundary conditions. It follows from the application of this methodology for various types of coupled vibro-acoustic problems that accurate predictions can be obtained with wave models, which are not only significantly smaller, but also computationally less demanding than corresponding element based models. Due to this enhanced computational efficiency, the practical frequency limitation of the proposed technique is substantially higher than for the existing techniques. In this way, the wave based prediction technique enables accurate predictions in the mid-frequency range, for which the computational efforts, involved with element based models, become prohibitively large.
iv
EEN GOLFGEBASEERDE VOORSPELLINGSTECHNIEK VOOR GEKOPPELDE VIBROAKOESTISCHE ANALYSE
Beknopte samenvatting Dit proefschrift stelt een nieuwe, golfgebaseerde voorspellingstechniek voor voor de dynamische regimerespons van gekoppelde vibro-akoestische systemen. De techniek is gebaseerd op een Trefftz-benadering, waarbij de veldveranderlijken worden beschreven met structurele en akoestische golffuncties, die homogene oplossingen zijn van de dynamische vergelijkingen, aangevuld met de nodige particuliere oplossingsfuncties. Op deze manier is er exact voldaan aan de dynamische vergelijkingen, ongeacht de bijdrages van de golffuncties tot de benaderingen voor de veldveranderlijken. Deze golffunctiebijdrages worden bepaald aan de hand van een gewogen-residu of een kleinste-kwadraten formulering van de randvoorwaarden. Uit de toepassing van deze methodiek voor een aantal representatieve vibroakoestische problemen is gebleken dat een grote nauwkeurigheid bekomen wordt met golfmodellen, die niet alleen van beduidend kleinere dimensie zijn dan elementgebaseerde modellen, maar tevens een kleinere rekenkundige belasting vergen. Bijgevolg wordt de limiet van de beschikbare rekencapaciteit pas bereikt bij veel hogere frequenties dan bij de huidige technieken. Hierdoor biedt de nieuwe techniek een geschikte manier om ook in het middenfrequentiegebied nauwkeurige voorspellingen te maken.
vi
Samenvatting van het proefschrift
1. Inleiding en doelstelling van het onderzoek belang van vibro-akoestische voorspellingstechnieken Wegens de steeds hoger wordende eisen van de klant en onder druk van een sterk competitieve markt wordt de ontwerpingenieur geconfronteerd met een steeds toenemend aantal ontwerpcriteria, die vaak tegenstrijdige doelstellingen vooropstellen. De industriële wereld is tot het besef en de overtuiging gekomen dat het inschakelen van adequate simulatietechnieken in alle stadia van het ontwerp- en ontwikkelingsproces een noodzakelijke vereiste is om de complexe ontwerpopdrachten doelgericht en efficiënt aan te pakken. Deze technieken laten toe zowel inzicht te verwerven in de gevoeligheden van de ontwerpcriteria voor de verschillende ontwerpparameters alsook het tijds- en kostenverslindende bouwen en testen van prototypes tot een minimum te beperken. Mede door de voortdurend scherper wordende wettelijke reglementeringen inzake geluidsemissie en menselijke blootstelling aan lawaai krijgen de akoestische eigenschappen van een product een steeds hogere prioriteit binnen het geheel van ontwerpcriteria. Vaak worden deze akoestische eigenschappen bepaald door structuurgeluid, waarbij akoestische drukgolven veroorzaakt worden door de dynamische verplaatsingen van een elastische structuur. Gezien de drukgolven ook een mechanische belasting vormen voor de structuur, zijn deze golven niet alleen het gevolg maar ook mede de oorzaak van de structuurtrillingen. Vooral voor systemen met een of meerdere akoestische caviteiten, omsloten door een dunwandige elastische structuur met geringe massa, is deze vibro-akoestische koppeling niet te verwaarlozen. Om inzicht te verwerven in de invloed van parameters zoals geometrie, randvoorwaarden en structurele en akoestische demping op dit complexe koppelingsmechanisme en om tot een efficiënt ontwerp van geluidsreducerende maatregelen te komen, zijn betrouwbare vibroakoestische voorspellingstechnieken noodzakelijk. De geluidsniveaus in de passagiersruimte van wagens of vliegtuigen zijn sterk afhankelijk van de wisselwerking tussen de drukgolven in deze ruimte en de dynamische respons van de wagencarrosserie of de dunwandige rompstructuur. De vibro-akoestische koppelingseffecten zijn bepalend voor de geluidstransmissie doorheen machine-omkapselingen en dubbelwandige structuren zoals dubbelwandige glaspanelen. Dit zijn slechts enkele van de vele toepassingen waarbij vibro-akoestische koppeling een dominante rol speelt in de akoestische eigenschappen. Met het toenemend gebruik van
Samenvatting van het proefschrift
vii
lichtgewicht composietmaterialen, zeker in de auto-, luchtvaart- en ruimtevaartindustrie, zullen deze vibro-akoestische koppelingseffecten trouwens nog aan belang winnen. beperkingen van de huidige voorspellingstechnieken Tot op heden zijn de voornaamste deterministische voorspellingstechnieken voor akoestische en structuurdynamische analyses gebaseerd op de eindigeelementen- en randelementenmethode. In deze methodes worden de akoestische en structurele domeinen of hun randoppervlakken opgedeeld in kleine elementen. Binnen elk element worden de dynamische veranderlijken beschreven door een aantal eenvoudige vormfuncties. De bijdrages van deze vormfuncties tot de oplossingsbenadering worden bepaald aan de hand van een integraalformulering van de dynamische vergelijkingen en de randvoorwaarden van het beschouwde continuumprobleem. Gezien de vormfuncties binnen elk element slechts een benaderende oplossing kunnen genereren, dient een voldoende aantal elementen gebruikt te worden om de benaderingsfout binnen aanvaardbare grenzen te houden. Voor de voorspelling van de regimerepons ten gevolge van een tijdsharmonische excitatie is de excitatiefrequentie een bepalende factor voor het aantal elementen en de daaruit voortvloeiende modelgroottes. Naarmate de frequentie van de systeemexcitatie verhoogt, verhoogt ook de ruimtelijke variatie van de dynamische respons, waardoor een fijnere elementopdeling vereist is. Dit resulteert in steeds groter wordende modellen, waardoor de vereiste rekentijden eveneens toenemen met de frequentie. Door deze zware rekenkundige belasting zijn de eindigeelementen- en randelementenmethode praktisch slechts bruikbaar tot een bepaalde frequentiegrens. Voor hogere frequenties worden de modellen dermate groot dat het opstellen en oplossen ervan, zelfs met de enorme rekenkracht van de moderne computers, onnoemelijk veel rekentijd vergt. In vergelijking met ongekoppelde akoestische of structuurdynamische problemen is de praktische bruikbaarheid van elementgebaseerde technieken voor gekoppelde vibro-akoestische problemen beperkt tot beduidend lagere frequenties. Dit is voornamelijk toe te schrijven aan de volgende factoren. • Gekoppelde vibro-akoestische modellen zijn aanzienlijk groter, gezien een structureel en een akoestisch probleem simultaan opgelost dienen te worden. • De numerieke oplossingsmethodes voor gekoppelde vibro-akoestische modellen zijn minder efficiënt, daar de gekoppelde modellen niet langer symmetrisch zijn, althans niet in hun meest gebruikte vorm, waarbij de
viii
Samenvatting van het proefschrift
akoestische druk en de structurele verplaatsing de dynamische veldveranderlijken zijn. • Het verlies aan modelsymmetrie is tevens de oorzaak van de aanzienlijk lagere efficiëntie van modelreductietechnieken zoals de modale expansie techniek. Doelstelling Het enige momenteel beschikbare alternatief is gebruik te maken van probabilistische voorspellingstechnieken, die gebaseerd zijn op statistische energie analyse of vermogenstroomanalyse. Deze technieken zijn veel minder rekenintensief, maar laten enkel toe een ruimte- en frequentiegemiddelde schatting te maken van de dynamische respons. Gezien deze technieken een voldoende hoge modale densiteit van het beschouwde dynamische systeem veronderstellen, zijn ze enkel geschikt voor hoogfrequente dynamische analyses. Tussen het laagfrequente toepassingsgebied van de elementgebaseerde technieken en het hoogfrequente toepassingsgebied van de probabilistische technieken ligt echter nog een breed frequentiegebied, waarvoor nog geen afdoende voorspellingstechnieken beschikbaar zijn. Voor heel wat industriële toepassingen is er nochtans nood aan deterministische technieken die in dit frequentiegebied een nauwkeurige voorspelling toelaten. In antwoord op dit hiaat stelt dit proefschrift een nieuwe deterministische techniek voor, die in staat is betrouwbare gekoppeld vibro-akoestische voorspellingen te maken voor een veel breder frequentiegebied dan de bestaande elementgebaseerde technieken.
2. Methodiek van de voorspellingstechniek 2.1. Inleiding De nieuwe voorspellingstechniek is gebaseerd op de indirecte Trefftzmethode voor het oplossen van continuumproblemen. In deze methode worden de veldveranderlijken beschreven door vormfuncties, die exact voldoen aan de vergelijkingen van het beschouwde continuumprobleem. De bijdrages van de vormfuncties tot de uiteindelijke oplossing worden bepaald aan de hand van een integraalformulering van de randvoorwaarden. Het grote voordeel van een dergelijke vormfunctiekeuze is dat er enkel een benaderingsfout wordt gemaakt op de randvoorwaarden. Hierdoor kan een goede voorspellingsnauwkeurigheid bekomen worden met aanzienlijk
Samenvatting van het proefschrift
ix
kleinere modellen dan met overeenkomstige eindige-elementenmodellen die gebruik maken van vormfuncties, die niet exact voldoen aan de vergelijkingen. De indirecte Trefftz-methode vereist echter wel dat een volledig set van vormfuncties gedefiniëerd kan worden, waarvoor de convergentie naar de exacte oplossing verzekerd is. Voor verschillende types continuumproblemen zijn dergelijke volledige vormfunctiesets reeds beschikbaar, waarvoor de theoretische convergentie bewezen is. Hun praktische implementatie leidt echter tot slecht-geconditioneerde modellen, wat de praktische convergentie sterk verstoort of zelfs onmogelijk maakt. Dit verklaart waarom de indirecte Trefftz-methode tot op heden nog niet uitgebouwd is tot een volwaardig modelleringsalternatief voor de elementgebaseerde technieken. Eén van de belangrijke verdiensten van het in dit proefschrift voorgestelde onderzoek is dat nieuwe, volledige vormfunctiesets gedefiniëerd zijn, die aanleiding geven tot deterministische modellen, die, ondanks hun slechte conditie, heel nauwkeurige voorspellingen toelaten van de dynamische regimerespons van gekoppelde vibro-akoestische systemen.
2.2. Basisprincipes 2.2.1. Probleemdefinitie De basisprincipes van de voorspellingstechniek worden besproken aan de hand van een tweedimensionaal gekoppeld vibro-akoestisch probleem, zoals getoond in figuur 1.
Figuur 1 : tweedimensionaal gekoppeld vibro-akoestisch probleem
x
Samenvatting van het proefschrift
Het randoppervlak Ωa van een gesloten akoestische caviteit V bestaat uit vier deeloppervlakken. Op de deeloppervlakken Ωp, Ωv en ΩZ zijn, respectievelijk, gekende druk-, normaalsnelheids- en normaalimpedantieverdelingen opgelegd, terwijl het deeloppervlak Ωs bestaat uit een dunne, vlakke plaat. De caviteit bevat een fluïdum met dichtheid ρ0 en geluidssnelheid c. Het materiaal van de vlakke plaat met dikte t heeft een dichtheid ρs, een Poisson coëfficiënt ν, een elasticiteitsmodulus E en een verliesfactor η. Op plaatpositie rF(xF’) wordt in de normaalrichting een externe lijnkracht F aangelegd, terwijl een externe akoestische lijnbron q aangelegd wordt op caviteitspositie rq(xq,yq). Beide excitaties hebben een harmonisch tijdsverloop met frequentie ω. In regimetoestand is de akoestische druk p in de caviteit bepaald door de Helmholtzvergelijking ∇ 2 p( r ) + k 2 . p( r ) = − jρ 0ωq.δ ( r ,r q ),
(1)
waarbij k(=ω/c) het akoestisch golfgetal is en waarbij δ een Dirac delta functie voorstelt. De normaalverplaatsing w van de plaat is bepaald door de dynamische plaatvergelijking ∇ 4 w( rs ) − kb4 . w( rs ) =
p( rs ) F .δ ( rs , rF ) + , D D
(2)
waarbij het buigingsgolfgetal kb en de buigstijfheid D van de plaat als volgt gedefiniëerd zijn,
ρ tω 2 Et 3 (1 + jη ) kb = 4 s en D = . D 12(1 − ν 2 )
(3)
De akoestische randvoorwaarden voor het beschouwde gekoppelde vibroakoestische probleem zijn r ∈ Ω p : p( r ) = p ( r ),
r ∈Ω v :
j ∂p( r ) = vn ( r ), ρ 0ω ∂n
Samenvatting van het proefschrift
r ∈Ω Z :
xi
j ∂p( r ) p( r ) j ∂p( r ) = , r ∈Ω s : = jωw( r ), ρ 0ω ∂n Z (r ) ρ 0ω ∂n
(4)
waarbij p , vn en Z respectievelijk de opgelegde druk-, normaalsnelheidsen normaalimpedantieverdelingen voorstellen. De normaalverplaatsing van de plaat is éénduidig bepaald door op de beide randposities twee structurele randvoorwaarden op te leggen.
2.2.2. Benadering voor de veldveranderlijken Voor de caviteitsdruk p(x,y) wordt een benaderende oplossing p(x, y) voorgesteld van de vorm
�
p ( x , y ) ≈ p( x , y ) =
�
na
∑ p a . Φ a ( x , y ) + pq ( x , y ) .
a=1
(5)
Elke akoestische golffunctie Φ a (x, y) is een homogene oplossing van de Helmholtzvergelijking (1),
Φ a ( x, y) = e
�
waarbij
− j ( k xa . x + k ya . y )
(6)
2 2 k xa + k ya = k2.
(7)
De functie pq (x, y) is een particuliere oplossing voor de niet-homogene Helmholtzvergelijking (1). Hiervoor wordt de analytische uitdrukking gebruikt voor het drukveld ten gevolge van een akoestische lijnbron in vrijeveld omstandigheden. Voor de normaalverplaatsing w(x’) van de plaat wordt een benaderende oplossing w(x’) voorgesteld van de vorm
�
�
w( x’) ≈ w( x’) =
4
na
s=1
a=1
�
�
�
∑ ws .Ψ s ( x’) + ∑ pa . wa ( x’) + w F ( x’) + wq ( x’).
(8)
De structurele golffuncties Ψ s (x’) zijn vier linear onafhankelijke, homogene oplossingen van de vierde-orde plaatvergelijking (2),
xii
Samenvatting van het proefschrift
Ψ s ( x’) = e − j
s
. k b . x’
, ( s = 1..4) .
(9)
De functie w F (x’) is een particuliere oplossing voor de lijnkrachtterm in het rechterlid van de plaatvergelijking. Hiervoor wordt de analytische uitdrukking gebruikt voor het verplaatsingsveld van een oneindige plaat ten gevolge van een lijnkrachtexcitatie in de normaalrichting van de plaat. De functie wq (x’) en de functies w a (x’) zijn particuliere oplossingen voor
�
die delen van de akoestische drukterm in het rechterlid van de plaatvergelijking, die overeenstemmen met, respectievelijk, de functie pq (x, y) en de akoestische golffuncties Φ a (x, y) in de voorgestelde oplossing (5). Hiervoor kunnen de analytische integraaluitdrukkingen gebruikt worden voor het verplaatsingsveld van een oneindige plaat ten gevolge van deze drukbelastingen. In het geval van een vlakke plaat kunnen voor de functies w a (x’) echter uitdrukkingen geformuleerd worden, die evenredig zijn met de akoestische golffuncties. Hoewel deze uitdrukkingen geen directe fysische betekenis hebben, worden ze verkozen boven de fysisch betekenisvolle integraaluitdrukkingen omwille van hun rekenkundig voordeel. Met deze oplossingsbenaderingen wordt het gekoppeld vibro-akoestisch continuumprobleem omgevormd tot een benaderend, discreet probleem, waarbij de onbekende golffunctiebijdrages pa en ws in de voorgestelde oplossingen (5) en (8) bepaald moeten worden. Een belangrijke eigenschap van deze oplossingen is dat ze steeds exact voldoen aan de dynamische vergelijkingen (1) en (2), ongeacht de waardes van de onbekenden pa en ws.
2.2.3. Gekoppeld vibro-akoestisch golfmodel Gezien de voorgestelde oplossingsbenaderingen (5) en (8) exact voldoen aan de dynamische vergelijkingen, zijn de onbekende golffunctiebijdrages pa en ws uitsluitend bepaald door de randvoorwaarden van het gekoppeld vibroakoestisch probleem. structurele randvoorwaarden Voor het beschouwde tweedimensionale probleem zijn de structurele randvoorwaarden gedefiniëerd op beide randposities van de plaat en kunnen als dusdanig gebruikt worden. Deze randvoorwaarden resulteren in vier vergelijkingen in de 4+na onbekende golffunctiebijdrages,
Samenvatting van het proefschrift
[ Ass
xiii
w s Csa ]. = { fs }. î pa
(10)
akoestische randvoorwaarden Gezien enkel matrixmodellen van eindige grootte numeriek opgelost kunnen worden, dienen de akoestische randvoorwaarden (4), die gedefiniëerd zijn op een oneindig aantal posities op het randoppervlak van de caviteit, benaderd te worden door een eindig aantal vergelijkingen. Hiervoor zijn twee types benaderende integraalformuleringen voorgesteld. 1. gewogen-residu formulering In een gewogen-residu formulering wordt, op basis van een gewichtsfunctie ~ p , het gewogen gemiddelde van de foutfuncties (residu’s) op de akoestische randvoorwaarden ten gevolge van de voorgestelde oplossingsbenaderingen nul gesteld,
�
� ���
− j ∂~ p j ∂p ~ ∫ ρ ω ∂n .( p − p ). dΩ + ∫ p.( ρ ω ∂n − vn ). dΩ + 0 Ωp 0 Ωv
� �
j ∂p p j ∂p ~ ~ ∫ p.( ρ ω ∂n − Z ). dΩ + ∫ p.( ρ ω ∂n − jωw ). dΩ = 0. 0 0 ΩZ Ωs
(11)
Door elke akoestische golffunctie Φ a in (5) als gewichtsfunctie te gebruiken in deze gewogen-residu formulering, worden de akoestische randvoorwaarden benaderend omgezet tot na vergelijkingen in de 4+na onbekende golffunctiebijdrages,
[Cas
( GR )
]
{ }
w ( GR ) ( GR ) s Aaa + Caa . = fa( GR ) , î pa
[
(12)
]
( GR ) waarbij de (naxna) deelmatrix Aaa symmetrisch is.
2. kleinste-kwadraten formulering De kleinste-kwadraten formulering is gebaseerd op een functionaal Fa, die een maat is voor de totale kwadratische benaderingsfout op de akoestische randvoorwaarden,
�
xiv
�
Samenvatting van het proefschrift 2
j ∂p Fa = ∫ β p . p − p . dΩ + ∫ β v . − vn . dΩ + ρ 0 ω ∂n Ωp Ωv 2
���
2
� �
2
(13)
j ∂p p j ∂p ∫ β Z . ρ ω ∂n − Z . dΩ + ∫ β s . ρ ω ∂n − jωw . dΩ . 0 0 ΩZ Ωs
De parameters β p, β v, β Z en β s laten toe het relatief belang van de verschillende types randvoorwaarden vast te leggen, alsook de dimensionele homogeniteit van de verschillende functionaaltermen te bewaren. Door deze functionaal te minimaliseren met betrekking tot elke akoestische golffunctiebijdrage pa, worden de akoestische randvoorwaarden benaderend omgezet tot na vergelijkingen in de 4+na onbekende golffunctiebijdrages,
[Cas
]
{
}
w ( KK ) s Aaa . = fa( KK ) , î pa
( KK )
[
(14)
]
( KK ) waarbij de (naxna) deelmatrix Aaa Hermitiaans is.
gekoppeld vibro-akoestisch golfmodel De combinatie van de structurele randvoorwaarden (10) met de gewogenresidu formulering (12) of de kleinste-kwadraten formulering (14) van de akoestische randvoorwaarden resulteert in een gekoppeld vibro-akoestisch golfmodel met 4+na vergelijkingen in de 4+na onbekende golffunctiebijdrages pa en ws.
2.2.4. Convergentie In de oplossingsbenaderingen (5) en (8) kan slechts een eindig aantal, na, akoestische golffuncties van type (6) gebruikt worden, hoewel een oneindig aantal golffuncties voldoet aan voorwaarde (7) voor de golfgetalcomponenten kxa en kya. De hamvraag is bijgevolg of er uit de oneindige verzameling van golffuncties een eindige selectie kan gemaakt worden, zodanig dat de oplossingsbenaderingen, in de limiet voor na→∝, convergeren naar de exacte oplossing.
Samenvatting van het proefschrift
xv
In hoofdstuk 2 van dit proefschrift is aangetoond dat, voor het geval van een convexe caviteit, een convergerende oplossing bekomen wordt door gebruik te maken van de akoestische golffuncties met golfgetalcomponenten a .π a .π a .π a .π ( k xa , k ya ) = ( 1 ,± k 2 − ( 1 ) 2 ) en ( ± k 2 − ( 2 ) 2 , 2 ) , (15) Lx Lx Ly Ly
waarbij a1,a2=0,±1,±2,... en waarbij Lx en Ly de afmetingen zijn van een omschrijvende rechthoek rond het convexe caviteitsdomein. Hoewel het wiskundig bewijs nog ontbreekt, is er geen tegenvoorbeeld gevonden voor de stelling dat, voor het geval van een concave caviteit, deze opgesplitst kan worden in een aantal deelcaviteiten en dat een convergerende oplossing bekomen wordt door, in elke deelcaviteit, gebruik te maken van golffuncties met golfgetalcomponenten van type (15), waarbij Lx en Ly de afmetingen zijn van een omschrijvende rechthoek rond de deelcaviteit, en door bijkomende continuïteitsvoorwaarden voor druk en normaalsnelheid op te leggen op de grensoppervlakken tussen de verschillende deelcaviteiten. Op basis van een aantal fysische overwegingen is in hoofdstuk 2 tevens een vuistregel opgesteld omtrent de waardes voor a1 en a2, waarbij de oneindige reeks van golfgetalcomponenten (15) afgebroken kan worden, om een goede voorspellingsnauwkeurigheid te bekomen. In dit opzicht is tevens gebleken dat een gewogen-residu formulering van de randvoorwaarden een betere convergentiesnelheid oplevert dan een kleinste-kwadraten formulering.
2.3. Eigenschappen 2.3.1. Vergelijking met de eindige-elementenmethode De golfgebaseerde voorspellingstechniek biedt een aantal belangrijke voordelen ten opzichte van de eindige-elementenmethode. • Gezien de benaderingen voor de veldveranderlijken exact voldoen aan de dynamische vergelijkingen, wordt er enkel een benaderingsfout gemaakt op de randvoorwaarden. Hierdoor zijn golfmodellen van een beduidend kleinere dimensie dan overeenkomstige eindige-elementenmodellen. • Gezien de ruimtelijke afgeleiden van de golffuncties eveneens golffuncties zijn met een zelfde ruimtelijk verloop, kunnen de afgeleide grootheden, zoals de akoestische deeltjessnelheid en de structurele
xvi
Samenvatting van het proefschrift
spanningen, met een zelfde graad van ruimtelijk detail benaderd worden als de akoestische druk en de structurele verplaatsing. Dit is voordelig voor de convergentiesnelheid, vooral voor gekoppelde vibro-akoestische problemen, waarbij het effect van het fluïdum op de structuur drukgecontroleerd is, maar waarbij het effect van de structuur op het fluïdum snelheidsgecontroleerd is. • Modelverfijning kan op een efficiënte manier gebeuren. Om de modelnauwkeurigheid in te schatten, moeten enkel de benaderingsfouten op de randvoorwaarden nagegaan worden. Daarenboven moeten bij het toevoegen van golffuncties aan de benaderingen voor de veldveranderlijken enkel de bijkomende matrixelementen berekend worden, terwijl de oorspronkelijke elementen in een golfmodel behouden blijven. In de eindige-elementenmethode vereist een globale verfijning van het elementennet een volledig nieuwe modelberekening. De golfgebaseerde voorspellingstechniek heeft ook een aantal nadelige eigenschappen in vergelijking met de eindige-elementenmethode. • Gezien de golffuncties complexe functies zijn, die in het volledige of toch minstens in grote deelgebieden van het continuumdomein gedefiniëerd zijn, zijn golfmodellen volledig bevolkt met complexe matrixelementen. • Door de impliciete frequentieafhankelijkheid van de golffuncties kunnen de matrices in een golfmodel niet ontbonden worden in frequentieonafhankelijke deelmatrices. Dit heeft voor gevolg dat een golfmodel volledig herberekend moet worden voor elke frequentie en dat de natuurlijke frequenties en modevormen niet berekend kunnen worden aan de hand van een standaard eigenwaardenprobleem. • De numerieke integraties voor de berekening van de matrixelementen in een golfmodel vereisen een beduidend groter aantal integratiepunten en bijgevolg ook een groter aantal rekenkundige bewerkingen. Dit is enerzijds te wijten aan het globale en sterk oscillerende karakter van de golffuncties, en anderzijds aan het feit dat de slechte conditie van een golfmodel een hoge integratienauwkeurigheid vereist. • De eindige-elementenmethode heeft een heel ruim toepassingsgebied, gezien de convergentie van een eindige-elementenmodel reeds bekomen wordt met eenvoudige vormfunctiebenaderingen. De convergentie van een golfmodel vereist daarentegen de definitie van een volledig set van golffuncties en van geschikte particuliere oplossingen.
Samenvatting van het proefschrift
xvii
2.3.2. Vergelijking met de randelementenmethode Net zoals de randelementenmethode vereist de golfgebaseerde voorspellingstechniek de definitie van een particuliere oplossing (kernfunctie) en resulteert de techniek in kleine, maar complexe, volledig bevolkte en frequentie-afhankelijke modellen. Naast deze gemeenschappelijke eigenschappen, heeft de golfgebaseerde voorspellingstechniek ook een aantal voordelige eigenschappen. • In heel wat gevallen bevat een integraalformulering, ttz. een gewogenresidu of een kleinste-kwadraten formulering, van de randvoorwaarden slechts enkelvoudige randintegralen. In de randelementenmethode daarentegen vereist een integraalformulering de rekenkundig duurdere berekening van dubbele randintegralen. Enkel een collocatieformulering geeft aanleiding tot enkelvoudige randintegralen, wat rekenkundig weliswaar efficiënter is, maar resulteert in een kleinere convergentiesnelheid dan een integraalformulering. • In tegenstelling tot de directe randelementenmodellen zijn golfmodellen voor ongekoppelde (akoestische) problemen symmetrisch of Hermitiaans. • De golfgebaseerde voorspellingstechniek vereist geen singuliere integraalberekeningen, noch speciale numerieke bewerkingen om de éénduidigheid van de oplossing te vrijwaren. • Bij een globale verfijning van een randelementennet moet een volledig nieuw randelementenmodel berekend worden. Zoals eerder reeds aangegeven, moeten bij de verfijning van een golfmodel echter enkel de bijkomende matrixelementen berekend worden, terwijl de oorspronkelijke elementen behouden blijven. • Na het oplossen van een golfmodel naar de onbekende golffunctiebijdrages, volgen de benaderingen voor de veldveranderlijken uit eenvoudige functie-evaluaties. In de randelementenmethode bekomt men deze benaderingen pas na bijkomende integraalberekeningen. De golfgebaseerde voorspellingstechniek heeft ook een aantal nadelige eigenschappen in vergelijking met de randelementenmethode. • De convergentie van een randelementenmodel wordt reeds bekomen met eenvoudige vormfunctiebenaderingen, terwijl de convergentie van een golfmodel de definitie van een volledig set van golffuncties vereist.
xviii proefschrift
Samenvatting van het
• Ieder matrixelement in een golfmodel vereist een integraalevaluatie over het volledig randoppervlak van het continuumdomein, terwijl de integratiegebieden voor de matrixelementen in een randelementenmodel telkens beperkt zijn tot een klein deel van het randoppervlak. • Een golfmodel voldoet niet impliciet aan de Sommerfeld stralingsvoorwaarde, die van toepassing is voor problemen met een oneindig uitgestrekt continuumdomein.
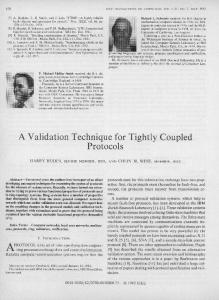
2.4. Numeriek voorbeeld Het volgende voorbeeld illustreert de nauwkeurigheid en de convergentie van de golfgebaseerde voorspellingstechniek. Figuur 2 toont een tweedimensionaal gekoppeld vibro-akoestisch systeem, waarbij een deel van het randoppervlak van de caviteit bestaat uit een dunne, vlakke plaat met ingeklemde randen. De tussenschotten met hoogte 0.5*Ly en alle andere delen van het randoppervlak van de caviteit zijn star. 3 De caviteit (Lx1+Lx2+Lx3=1.5 m, Ly=1 m) is gevuld met lucht (ρ0=1.225 kg/m , 9 2 c=340 m/s) en de aluminium plaat (E=70.10 N/m , ρs=2790 kg/m3, ν=0.3, t=0.002 m, η=0) wordt geëxciteerd door een eenheidslijnkracht op positie x0’=0.5 m. De excitatiefrequentie is ω=2π.200 Hz.
Figuur 2 : tweedimensionaal gekoppeld vibro-akoestisch systeem met een concave caviteit
Samenvatting van het proefschrift
xix
Om een convergerend golfmodel te bekomen, wordt de concave caviteit opgesplitst in drie deelcaviteiten, zoals aangegeven in figuur 2. De benaderingen van de drukvelden in deze convexe deelcaviteiten worden beschreven met akoestische golffuncties, waarvan de golfgetalcomponenten van type (15) bepaald worden op basis van de afmetingen Lx1xLy, Lx2xLy en Lx3xLy van de omschrijvende rechthoekige domeinen. Aan de hand van de inklemmingsrandvoorwaarden van de plaat en de gewogen-residu formulering van de akoestische randvoorwaarden is een golfmodel opgesteld voor het bepalen van de bijdrages van 4 structurele en 540 akoestische golffuncties in de benaderingen voor de caviteitsdruk en de normaalverplaatsing van de plaat. Figuur 3 toont de resulterende plaatverplaatsing en de normaalverplaatsing van de lucht aan het grensoppervlak tussen de plaat en de caviteit. Op deze figuur is duidelijk te zien dat de inklemmingsvoorwaarden van de plaat en de continuïteitsvoorwaarde voor de structurele en akoestische normaalverplaatsing nauwkeurig voorgesteld zijn.
Figuur 3 : ogenblikkelijke normaalverplaatsing w van de plaat (volle lijn) en akoestische normaalverplaatsing wa (+) aan het plaat-caviteit grensoppervlak bij 200 Hz
Figuur 4 toont het resulterende drukveld in de caviteit. Het feit dat de contourlijnen loodrecht staan op de starre delen van het randoppervlak van de caviteit en dat ze continu verlopen over de grensoppervlakken tussen de verschillende deelcaviteiten, toont aan dat ook de overige akoestische randvoorwaarden nauwkeurig voorgesteld zijn.
xx
Samenvatting van het proefschrift
Figuur 4 : ogenblikkelijke caviteitsdruk bij 200 Hz
Gezien alle randvoorwaarden nauwkeurig voorgesteld zijn en gezien de benaderingen voor de veldveranderlijken exact voldoen aan de dynamische vergelijkingen, mag men besluiten dat de voorgestelde techniek in staat is een heel nauwkeurige voorspelling te maken van de dynamische regimerespons van het beschouwde vibro-akoestische systeem.
Figuur 5 : structurele en akoestische convergentiecurves bij 200 Hz
Samenvatting van het proefschrift
xxi
Figuur 5 toont de relatieve benaderingsfout ∆w op de normaalverplaatsing op de plaatpositie x’=0.25m (∇) en de relatieve benaderingsfouten ∆p op de druk op drie caviteitsposities ((x,y)=(0.2m,0.2m) (+), (x,y)=(1m,0.5m) (o) en (x,y)=(1.3m,0.8m) (*)) in functie van het aantal golffuncties, dat gebruikt wordt voor de benaderingen van de veldveranderlijken. Deze figuur illustreert dat de voorgestelde set van akoestische golffuncties toelaat om, ondanks de slechte conditie van de resulterende golfmodellen, tot een convergerende oplossing te komen.
3. Toepassing voor twee- en driedimensionale gekoppelde vibro-akoestische problemen 3.1. Toepassingsgebied Hoofdstukken 3 en 4 van dit proefschrift beschrijven hoe de golfgebaseerde voorspellingstechniek toegepast kan worden voor verscheidene types tweeen driedimensionale gekoppelde vibro-akoestisch problemen. Vooreerst worden vibro-akoestische problemen behandeld, waarbij een deel van het randoppervlak van een tweedimensionale, gesloten caviteit bestaat uit een vlakke plaat of uit een agglomeraat van cilindrische schaalsecties. Voor dergelijke problemen is de benadering voor de caviteitsdruk eventueel na opsplitsing van de caviteit in een aantal (convexe) deelcaviteiten - gebaseerd op een set van akoestische golffuncties, waarvan de golfgetalcomponenten afhangen van het akoestisch golfgetal en van de afmetingen van een omschrijvende rechthoek rond de (deel)caviteit (zie (15)). De benadering voor de normaalverplaatsing van een vlakke plaat is gebaseerd op 4 structurele golffuncties (zie (9)), terwijl de benaderingen voor de radiale en tangentiële verplaatsingen van cilindrische schaalsecties gebaseerd zijn op 6 structurele golffuncties. Uit verschillende toepassingsvoorbeelden van dergelijke vibro-akoestische problemen is gebleken dat deze structurele en akoestische golffuncties, aangevuld met de nodige particuliere oplossingsfuncties, toelaten om heel nauwkeurige voorspellingen te maken van de dynamische regimerespons. Vervolgens is de golfgebaseerde voorspellingsmethodiek toegepast voor het modelleren van het dynamisch gedrag van poreuze isolatiematerialen. In tegenstelling tot een niet-viskeus fluïdum, waarin slechts één longitudinaal golftype kan optreden, kunnen in een poreus medium drie golftypes optreden; twee longitudinale golftypes en één transversaal golftype. Bijgevolg worden de verplaatsingen en spanningen in zowel de vaste faze
xxii
Samenvatting van het proefschrift
als de fluïdumfaze van een tweedimensionaal poreus medium benaderd met drie golffunctiesets van type (15), elk gebaseerd op één van de drie golfgetallen. In de toepassingsvoorbeelden is ondermeer aangetoond dat de aanname van een ruimtelijk onafhankelijke normaalimpedantie voor een poreuze dempingslaag in een caviteit tot aanzienlijke modelleringsfouten kan leiden. Om de geluidsafstraling van een gekoppeld vibro-akoestisch systeem in een oneindig uitgestrekt akoestisch domein te kunnen voorspellen, wordt op een eindige afstand van het systeem een bijkomend randoppervlak gedefiniëerd, waarop de specifieke akoestische impedantie ρ0c als normaalimpedantie opgelegd wordt. Op deze manier kan het afgestraald geluidsveld benaderend gemodelleerd worden als een drukveld in een gesloten caviteit, dat beschreven wordt met een golffunctieset van type (15). Tenslotte worden vibro-akoestische problemen behandeld, waarbij een deel van het randoppervlak van een driedimensionale, gesloten caviteit bestaat uit een vlakke plaat. De caviteitsdruk wordt op een volledig gelijkaardige manier benaderd als bij tweedimensionale problemen. De akoestische golffuncties bevatten nu echter wel drie golfgetalcomponenten, waarbij naar analogie met het tweedimensionale set (15) - telkens twee componenten omgekeerd evenredig zijn met de overeenkomstige afmetingen van een omschrijvend rechthoekig prisma rond de caviteit en waarbij de derde component volgt uit het feit dat aan de homogene Helmholtzvergelijking voldaan moet zijn. De benadering voor de structurele normaalverplaatsing vereist nu eveneens een golffunctieselectie, aangezien een oneindig aantal lopende buigingsgolven met golfgetal kb en niet-lopende golven met golfgetal jkb kunnen optreden in een vlakke plaat. Opnieuw wordt een convergerende oplossing bekomen door twee golffunctiesets van type (15) te selecteren, elk gebaseerd op één van de twee golfgetallen.
3.2. Vergelijking met de eindige-elementenmethode De ontwikkeling van de golfgebaseerde voorspellingstechniek heeft als doel om via een verhoogde rekenkundige efficiëntie nauwkeurige voorspellingen te kunnen maken voor een veel breder frequentiegebied dan mogelijk met de bestaande technieken. Daarom zijn voor verscheidene gekoppelde vibroakoestische problemen de nauwkeurigheid en de bijhorende rekenkundige belasting van de nieuwe techniek en van de eindige-elementenmethode met elkaar vergeleken. Uit deze vergelijkingen is duidelijk gebleken dat de doelstelling bereikt is. Het volgende voorbeeld illustreert dit.
Samenvatting van het proefschrift
xxiii
Figuur 6 toont een driedimensionale caviteit, waarvan een deel van het randoppervlak bestaat uit een vlakke plaat met ingeklemde randen. Alle andere delen van het randoppervlak van de caviteit zijn star. Het systeem wordt geëxciteerd door een tijdsharmonische normaalkracht op de plaat.
Figuur 6 : driedimensionaal gekoppeld vibro-akoestisch systeem
Voor het geval van een aluminium plaat (E=70.109 N/m2, ρs=2790 kg/m3, ν=0.3, t=0.002 m, η=0), waarbij de caviteit (Lx=1.5 m, Ly=0.5 m, Lz=1 m) met lucht (ρ0=1.225 kg/m3, c=340 m/s) gevuld is, toont figuur 7 de directe frequentieresponsiefuncties, die bekomen worden met een golfmodel met 314 golffuncties (volle lijn) en met eindige-elementenmodellen (streepjeslijn) met 1849 (a), 12586 (b) en 39991 (c) knoopveranderlijken. Deze figuur illustreert duidelijk het effect van de opdeling van een domein in kleine elementen. Door het benaderen van de veldveranderlijken met eenvoudige vormfuncties, wordt de ‘stijfheid’ van het systeem overschat. Dit heeft voor gevolg dat de resonantiefrequenties systematisch overschat worden en dat deze overschatting, voor een gegeven elementennet, groter wordt naarmate de frequentie stijgt. Uit deze figuur blijkt tevens dat, door het verfijnen van het elementennet, de eindige-elementenresultaten geleidelijk convergeren naar de resultaten van het golfmodel, dat een beduidend kleinere dimensie heeft. Dat de nieuwe techniek, in vergelijking met de eindige-elementenmethode, een hoge nauwkeurigheid oplevert met niet alleen beduidend kleinere, maar ook rekenkundig efficiëntere modellen, mag blijken uit figuur 8. Deze figuur toont de relatieve benaderingsfouten ∆w en ∆p op, respectievelijk, de normaalverplaatsing van een punt van de vlakke plaat en de druk in een punt van de caviteit in functie van de vereiste rekentijd.
xxiv
Samenvatting van het proefschrift
Figuur 7 : directe frequentieresponsiefunctie (golfmodel (volle lijn) met 314 golffuncties, EE-modellen (streepjeslijn) met 1849 (a), 12586 (b) en 39991 (c) knoopveranderlijken)
Merk hierbij op dat de rekentijden voor de golfmodellen (volle lijn) zowel de tijd voor het berekenen als voor het oplossen van het model omvatten. Voor de eindige-elementenmodellen (streepjeslijn) worden enkel de oplossingstijden aangegeven, gezien deze modellen niet voor elke frequentie opnieuw berekend worden, maar samengesteld worden uit frequentie-
Samenvatting van het proefschrift
xxv
onafhankelijke deelmatrices. Merk ook op dat de golfgebaseerde voorspellingstechniek geïmplementeerd is in een MATLAB-omgeving, terwijl de eindige-elementenresultaten bekomen zijn met het MSC/NASTRANpakket. Door de nieuwe techniek eveneens in een efficiëntere programmeeromgeving te implementeren zal de verhoogde rekenkundige efficiëntie, naar alle waarschijnlijkheid, nog meer uitgesproken zijn.
Figuur 8 : structurele (links) en akoestische (rechts) convergentiecurves bij 60 Hz (+) en 180 Hz (∇) (golfmodellen (volle lijn), EE-modellen (streepjeslijn))
4. Besluiten Dit proefschrift stelt een nieuwe, golfgebaseerde voorspellingstechniek voor voor de dynamische regimerespons van gekoppelde vibro-akoestische systemen. De techniek is gebaseerd op de indirecte Trefftz-methode, waarbij, in tegenstelling tot elementgebaseerde technieken, de structurele en akoestische domeinen niet meer opgedeeld worden in kleine elementen, maar elk in hun geheel beschouwd of in een klein aantal deeldomeinen opgedeeld worden. De benaderingen voor de veldveranderlijken in elk (deel)domein worden beschreven door structurele en akoestische
xxvi
Samenvatting van het proefschrift
golffuncties, die homogene oplossingen zijn van de dynamische vergelijkingen, aangevuld met de nodige particuliere oplossingsfuncties. Op deze manier is er steeds exact voldaan aan de dynamische vergelijkingen, ongeacht de bijdrages van de golffuncties tot de benaderingen voor de veldveranderlijken. Deze golffunctiebijdrages worden bepaald aan de hand van een gewogen-residu of een kleinste-kwadraten formulering van de randvoorwaarden. De voornaamste beperking van de indirecte Trefftz-methode is dat een volledig set van vormfuncties gedefiniëerd moet worden, waarvoor de convergentie naar de exacte oplossing verzekerd is. Voor sommige types continuumproblemen zijn dergelijke volledige vormfunctiesets reeds beschikbaar. Hun praktische implementatie leidt echter tot slecht-geconditioneerde modellen, wat de praktische convergentie sterk verstoort of zelfs onmogelijk maakt. Dit verklaart waarom de indirecte Trefftz-methode tot op heden nog niet uitgebouwd is tot een volwaardig modelleringsalternatief voor de elementgebaseerde technieken. Eén van de belangrijke verdiensten van het voorgestelde onderzoek is dat volledige golffunctiesets gedefiniëerd zijn, die aanleiding geven tot deterministische modellen, die, ondanks hun slechte conditie, heel nauwkeurige voorspellingen toelaten van de dynamische regimerespons van gekoppelde vibro-akoestische systemen. Uit de toepassing van de golfgebaseerde voorspellingstechniek voor een aantal representatieve vibro-akoestische problemen is gebleken dat hoge nauwkeurigheden bekomen worden met golfmodellen, die niet alleen van beduidend kleinere dimensie zijn dan elementgebaseerde modellen, maar tevens een kleinere rekenkundige belasting vergen. Bijgevolg wordt de limiet van de beschikbare rekencapaciteit pas bereikt bij veel hogere frequenties dan bij de huidige technieken. Hierdoor biedt de nieuwe techniek - hoewel nog een aantal onderzoeksstappen nodig zijn, vooral met betrekking tot de algemene toepasbaarheid en de automatisatie van het modelleringsproces - een geschikte manier om ook in het middenfrequentiegebied nauwkeurige voorspellingen te maken, waarvoor de bestaande technieken praktisch ontoereikend zijn.
NOMENCLATURE The main symbols, used in this dissertation, are listed below. 2
A b c D es E E1 E2 Ese f F Fa G h
first Lamé constant (N/m ) viscous coupling factor (kg/m3s) speed of sound (m/s) plate bending stiffness (Nm) solid phase volumetric strain (-) modulus of elasticity (N/m2) modulus of elasticity of the bulk solid phase (N/m2) modulus of elasticity of the bulk fluid phase (N/m2) contribution of a poroelastic dilatational wave function (-) normal force distribution (N/m2) normal force (2D: N/m, 3D: N) acoustic functional Green’s kernel function porosity (-)
H 0( 2)
zero-order Hankel function of the second kind imaginary unit acoustic wavenumber (1/m) poroelastic dilatational wavenumber (1/m) poroelastic dilatational wavenumber (1/m) structural bending wavenumber (1/m) poroelastic rotational wavenumber (1/m)
j k k1 k2 kb kt
xxviii
mn M n n na ne ns nw N p ~ p pa pq q Q Qa Qn r R Rφ s t �
u un us U Un v v vn V Vp w ~ w �
�
plate bending moment per unit length (N) bending moment per unit length in a cylindrical shell section (N) normal vector normal direction number of acoustic wave functions number of poroelastic dilatational wave functions number of structural wave functions number of poroelastic rotational wave functions 2 shear modulus (N/m ) acoustic pressure (N/m2) acoustic weighting function acoustic wave function contribution (N/m2) particular solution function for the acoustic pressure, due to an acoustic source distribution (N/m2) acoustic volume velocity distribution (1/s) shear force per unit length in a cylindrical shell section (N/m) acoustic volume velocity (2D : m2/s, 3D : m3/s) generalised plate shear force per unit length (N/m) position vector (m) radius of a cylindrical shell section (m) residual error function, associated with a boundary condition for dynamic quantity φ fluid stress (N/m2) plate thickness (m) time (s) solid phase displacement vector (m) normal solid phase displacement (m) tangential solid phase displacement (m) fluid phase displacement vector (m) normal fluid phase displacement (m) velocity vector (m/s) circumferential displacement of a cylindrical shell section (m) normal velocity (m/s) acoustic domain poroelastic domain normal structural displacement (m) structural weighting function
xxix �
wa �
wF �
wq
ws Wsw Z βp β s, β v βZ γn γs ΓmQ
Γs Γwθ Γwm δ ∆ϕ ε ε‘ η θn λ λb λc ν ρ0 ρ1 ρ2 ρs σ σi
particular solution function for the normal displacement, due to the pressure loading, associated with an acoustic wave function (m) particular solution function for the normal displacement, due to a normal mechanical force (m) particular solution function for the normal displacement, due to the pressure loading from an acoustic source distribution (m) structural wave function contribution (m) contribution of a poroelastic rotational wave function (-) impedance (kg/m2s) pressure weighting parameter in an acoustic functional velocity weighting parameters in an acoustic functional impedance weighting parameter in an acoustic functional direction, normal to a surface boundary direction, tangent to a surface boundary structural boundary with prescribed generalised shear force and bending moment distributions boundary of a structural surface structural boundary with prescribed normal translational and rotational displacement distributions structural boundary with prescribed normal displacement and bending moment distributions Dirac delta function (1D : 1/m, 2D : 1/m2, 3D : 1/m3) relative prediction error on dynamic quantity ϕ fluid phase volumetric strain (-) geometrical structure factor (-) material loss factor (-) normal rotational displacement (rad) acoustic wavelength (m) structural bending wavelength (m) measure for the fluid-structure coupling interaction (-) Poisson coefficient (-) 3 ambient mass density of the fluid (kg/m ) 3 bulk density of the solid phase (kg/m ) bulk density of the fluid phase (kg/m3) structural mass density (kg/m3) flow resistivity (Ns/m4) singular value
xxx
σn τns ϕ Φa Ψe Ψs Ψω ω ωs Ωa Ωc Ωp Ωp1
∇
solid normal forces per unit poroelastic material area (N/m2) solid shear forces per unit poroelastic material area (N/m2) angular position (rad) acoustic wave function poroelastic dilatational wave function structural wave function poroelastic rotational wave function circular frequency (rad/s) solid phase rotational strain (-) acoustic boundary surface boundary surface between two subdomains acoustic boundary surface with a prescribed pressure distribution poroelastic boundary surface with prescribed normal fluid, normal solid and tangential solid displacement distributions poroelastic boundary surface with prescribed fluid stress, normal and shear solid stress distributions elastic structural surface acoustic boundary surface with a prescribed normal velocity distribution acoustic boundary surface with a prescribed normal impedance distribution acoustic boundary surface at infinity approximation prescribed value amplitude imaginary part real part complex conjugate complex conjugate transpose transpose gradient vector
∇2
Laplace operator
Ωp2 Ωs Ωv ΩZ Ω∝ ^ −
| | Im( ) Re( ) * H T �
TABLE OF CONTENTS DANKWOORD ABSTRACT NEDERLANDSE SAMENVATTING
i iii v
NOMENCLATURE
xxvii
TABLE OF CONTENTS
xxxi
1. INTRODUCTION AND STATE-OF-THE-ART IN COUPLED VIBRO-ACOUSTIC MODELLING 1 1.1. Introduction 1.1.1. Fluid-structure interaction 1.1.2. Importance of (vibro-acoustic) numerical modelling 1.1.3. Scope of the dissertation
1 1 3 4
1.2. Formulation of a coupled vibro-acoustic problem
5
1.3. Existing numerical prediction techniques 1.3.1. Basic concepts and properties of FEM and BEM
11 12
xxxii
1.3.1.1. FEM 1.3.1.2. BEM 1.3.1.3. FEM versus BEM for acoustic problems 1.3.2. Coupled FE/FE models 1.3.2.1. Interior problems 1.3.2.2. Exterior problems 1.3.3. Coupled FE/BE models 1.3.3.1. Coupled FE/direct BE model 1.3.3.2. Coupled FE/indirect BE model 1.3.4. Coupled FE/FE models versus coupled FE/BE models 1.3.5. Limitations of coupled models 1.4. Recent advances in numerical prediction techniques 1.4.1. Motivation 1.4.2. Advances in element based prediction techniques 1.4.3. Trefftz approach 1.4.3.1. Trefftz method 1.4.3.2. Dynamic stiffness method 1.4.3.3. T-element method 1.4.4. Wave based prediction technique 1.4.4.1. Basic principles 1.4.4.2. Outline of the dissertation
12 22 30 31 31 36 39 39 40 40 42 48 48 49 52 52 56 59 61 61 62
2. METHODOLOGY OF THE WAVE BASED PREDICTION TECHNIQUE 65 2.1. Introduction
65
2.2. Problem definition
67
2.3. Field variable expansions 2.3.1. Acoustic pressure expansion 2.3.2. Structural displacement expansion
70 70 71
2.4. Coupled vibro-acoustic wave model 2.4.1. Integral formulation of the boundary conditions 2.4.1.1. Weighted residual formulation 2.4.1.2. Least-squares formulation 2.4.2. Model properties
73 73 74 78 80
2.5. Convergence requirements 2.5.1. Introductory considerations 2.5.2. Rectangular continuum domain 2.5.3. Non-rectangular continuum domain
82 82 84 88
xxxiii
2.5.4. Wave model implementation
93
2.6. Practical implementation 2.6.1. Wave function scaling 2.6.2. Numerical integration 2.6.3. Wave function truncation
104 104 106 107
2.7. Numerical condition and convergence 2.7.1. Condition 2.7.2. Convergence 2.7.2.1. A posteriori convergence assessment 2.7.2.2. Some validation examples 2.7.2.3. Weighted residual versus least-squares model 2.7.2.4. Comparison with an existing complete function set
109 109 113 113 114 122 124
2.8. Comparison with FEM and BEM
128
2.9. Conclusions
130
3. APPLICATION OF THE WAVE BASED PREDICTION TECHNIQUE FOR TWO-DIMENSIONAL COUPLED VIBROACOUSTIC PROBLEMS 133 3.1. Introduction
133
3.2. Interior coupled vibro-acoustic problems with flat structural components 3.2.1. Vibro-acoustic reciprocity 3.2.2. Comparison with coupled FE/FE models
134 134 136
3.3. Interior coupled vibro-acoustic problems with curved structural components 3.3.1. Problem definition 3.3.1.1. Dynamic equations for circular cylindrical shell structures 3.3.1.2. Coupled vibro-acoustic problem 3.3.2. Field variable expansions 3.3.2.1. Acoustic pressure expansion 3.3.2.2. Structural field variable expansions 3.3.3. Coupled vibro-acoustic wave model 3.3.4. Validation examples 3.3.4.1. Cavity-backed circular cylindrical shell section 3.3.4.2. Fluid-loaded circular cylindrical shell
142 142 142 145 146 146 147 150 151 151 153
xxxiv
3.3.5. Comparison with coupled FE/FE models
156
3.4. Interior coupled vibro-acoustic problems with poroelastic insulation material 3.4.1. Problem definition 3.4.1.1. Dynamic equations 3.4.1.2. Boundary conditions 3.4.2. Field variable expansions 3.4.3. Wave model 3.4.4. Validation example 3.4.5. Accuracy of a spatially invariant impedance model
165 166 166 171 172 174 178 181
3.5. Exterior coupled vibro-acoustic problems
187
3.6. Conclusions
190
4. APPLICATION OF THE WAVE BASED PREDICTION TECHNIQUE FOR THREE-DIMENSIONAL COUPLED VIBRO-ACOUSTIC PROBLEMS
193
4.1. Introduction
193
4.2. Uncoupled plate problems 4.2.1. Problem definition 4.2.2. Field variable expansion 4.2.3. Weighted residual wave model 4.2.4. Convergence requirements 4.2.5. Some validation examples 4.2.6. Comparison with an existing complete function set
194 194 197 198 204 211 215
4.3. Uncoupled interior acoustic problems 4.3.1. Problem definition 4.3.2. Field variable expansion 4.3.3. Weighted residual wave model 4.3.4. Convergence requirements 4.3.5. Validation example
217 217 218 219 220 225
4.4. Coupled vibro-acoustic problems 4.4.1. Problem definition 4.4.2. Field variable expansions 4.4.3. Coupled vibro-acoustic wave model 4.4.4. Performance comparison with coupled FE/FE models 4.4.5. Modal analysis of a double-panel partition
227 228 229 237 240 251
xxxv
4.5. Conclusions
5. CONCLUSIONS AND FUTURE DEVELOPMENTS
258
259
5.1. Conclusions
259
5.2. Future developments
263
APPENDIX A. FINITE ELEMENT METHOD FOR UNCOUPLED ACOUSTIC PROBLEMS
265
APPENDIX B. FINITE ELEMENT METHOD FOR UNCOUPLED STRUCTURAL PROBLEMS 297 APPENDIX C. DIRECT BOUNDARY ELEMENT METHOD FOR UNCOUPLED ACOUSTIC PROBLEMS 335 APPENDIX D. COUPLED FE/FE AND COUPLED FE/BE MODELS 351 APPENDIX E. WAVE PROPAGATION IN FLUIDSATURATED POROELASTIC MEDIA
371
APPENDIX F. COUPLED VIBRO-ACOUSTIC BEHAVIOUR OF DOUBLE-PANEL PARTITIONS 391 REFERENCES
433
xxxvi
1. INTRODUCTION AND STATE-OF-THE-ART IN COUPLED VIBRO-ACOUSTIC MODELLING
1.1. Introduction 1.1.1. Fluid-structure interaction Whenever an elastic structure is (partly) in contact with a fluid, the structural vibrations and the acoustic pressure field in the fluid are influenced by the mutual vibro-acoustic coupling interaction: the force loading on the structure, caused by the acoustic pressure along the fluidstructure interface, influences the structural vibrations, while at the same time the acoustic pressure field in the fluid is also sensitive to the structural vibrations along the fluid-structure interface. The strength of this vibroacoustic coupling interaction is largely dependent on the geometry of the structure and the fluid domain as well as on the fluid and structural material properties and on the frequency of the dynamic disturbances. Depending on the strength of the mutual interaction, vibro-acoustic systems may be classified into uncoupled and coupled systems. In uncoupled vibro-acoustic systems, the mutual vibro-acoustic coupling interaction between the structural and the fluid components is very weak and may be neglected in the analysis of the dynamic behaviour of such systems. In this way, only a one-way interaction must be considered, yielding two types of dynamic problems for uncoupled vibro-acoustic systems. In the first type, the structural components are regarded as
2
Chapter 1
independent external excitations for the fluid components, in that the vibrations of the structural components generate acoustic pressures in the fluid components, whose force loading effects on the exciting structural vibrations are negligible. In the second type of dynamic problems, the fluid components act as independent force excitations for the structural components, in that the pressure distributions along the fluid-structure interfaces, caused by the acoustic waves in the fluid, generate vibrations in the structural components, whose effects on the exciting pressure distributions are negligible. In the latter, the exciting pressure distributions are usually referred to as ‘blocked’ pressure distributions to indicate that the pressure components, radiated by the structural vibrations, are negligible and that the considered pressure distributions correspond with the ones that would occur when the structural components are rigid (‘blocked’). Considering only a one-way interaction between the structural and fluid components is a reasonable assumption for many vibro-acoustic systems, especially when an elastic structure with a high stiffness is surrounded by a low-density fluid. An engine block, surrounded by air, is an example of an uncoupled vibro-acoustic system, in which only the effect of the structure on the fluid is important, since the radiated pressure field, induced by the engine block vibrations, has a negligible effect on the engine block vibrations. The analysis of the vibrations of window panes in houses, induced by adjacent traffic noise, is an example of an uncoupled vibroacoustic problem, in which the effect of the structural vibrations on the acoustic pressure excitation is negligible. In coupled vibro-acoustic systems, the mutual vibro-acoustic coupling interaction between the structural and the fluid components is no longer negligible and all components must be regarded as parts of one coupled system, instead of considering the structural components as independent excitations for the fluid components or vice versa. Strong coupling effects may occur, for instance, when an elastic structure is submerged in a highdensity fluid, as it is the case, for example, for submarines, or when a thin, light-weight structure is in contact with even a low-density fluid, as it is the case, for example, for electrodynamic loudspeakers. ATALLA and BERNHARD (1994) defined a dimensionless measure λc to indicate the strength of the mutual coupling interaction in a vibro-acoustic system,
λc =
ρ 0c , ρ s tω
(1.1)
Introduction and state-of-the-art in coupled vibro-acoustic modelling
3
where ω is the circular frequency of a time-harmonic structural or acoustic excitation of the system, t is a characteristic thickness of the structure, ρs is the mass density of the structure, ρ0 and c are the mass density and sound speed of the fluid. Based on this coupling measure λc, a criterion may be defined to assess the importance of the vibro-acoustic coupling interaction: systems with large values of λc (> 1) should be regarded as coupled vibroacoustic systems, whereas systems with small values of λc (>
λ πl 2 , , r >> l, r >> 2π 2λ
(3.110)
where r is the distance from the radiating object, λ is the acoustic wavelength and l is a characteristic dimension of the radiating object.
Application for two-dimensional coupled vibro-acoustic problems
189
As a result, the distance between the artificially introduced boundary surface and the actual boundary surface of the coupled vibro-acoustic system must be large (for the considered example, the radius R of the half-cylindrical boundary surface should be at least 5m). Consequently, the bounded exterior fluid domain must still be large, which results in large prediction models.
Figure 3.33 : coupled vibro-acoustic response at 1000 Hz ((a) instantaneous exterior pressure in the plane of the baffle, (b) instantaneous normal fluid displacement in the plane of the baffle (solid line) and normal plate displacement (+-marks), (c) instantaneous pressure along the cavity-plate interface)
For this reason, one of the next research steps in the development of the proposed prediction technique will focus on the enhancement of the modelling efficiency for exterior problems. On the one hand, the use of a
190
Chapter 3
more advanced impedance boundary condition for the artificially introduced boundary surface, as proposed by KELLER and GIVOLI (1989) and briefly described in section 1.3.2.2, will be explored. On the other hand, it will be investigated whether, in a similar way as in the boundary element method, the introduction of an artificial boundary surface can be avoided. In this respect, the possibility will be explored of defining an additional wave function truncation for the pressure field expansion in an unbounded acoustic domain, such that the Sommerfeld radiation condition is inherently incorporated in the wave model.
Figure 3.34 : amplitudes of the pressure (solid) and normal fluid velocity, multiplied by the impedance value ρ0c (+-marks), along the half-cylindrical boundary surface (1000 Hz)
3.6. Conclusions This chapter presents the application of the wave based prediction technique for the modelling of the steady-state dynamic behaviour of the main components that may be encountered in two-dimensional coupled vibroacoustic problems.
Application for two-dimensional coupled vibro-acoustic problems
191
Through various validation problems, it is illustrated how the prediction methodology, proposed in the previous chapter, allows an accurate prediction of the steady-state dynamic response of two-dimensional coupled vibro-acoustic systems, involving both flat and curved structural components. It is also indicated how the prediction methodology can be applied for the accurate prediction of the steady-state dynamic behaviour of both phases in fluid-saturated poroelastic materials. As a result, the effect of of a layer of poroelastic insulation material, used as damping treatment for an acoustic cavity, for instance, can be assessed with a full dynamic model of the insulation layer. This avoids the use of an impedance model, for which it is illustrated that the commonly used assumption of a spatially invariant impedance may induce some substantial approximation errors. For exterior problems, involving unbounded acoustic domains, the prediction technique, at least in its current stage of development, requires the transformation of the exterior problem into an approximated interior problem. This is obtained by confining the unbounded acoustic domain to a bounded domain through the introduction of an artificial boundary surface, on which an energy absorbing impedance boundary condition is imposed. In order to assess the computational efficiency of the new wave based prediction technique in comparison with the existing finite element method, the accuracy and the associated computational efforts, involved with a wave model and a corresponding coupled FE/FE model, are compared for various validation examples. These comparisons reveal the beneficial convergence rate of the proposed wave based prediction technique, in that highly accurate predictions are obtained with a substantially smaller computational effort. This beneficial convergence rate will also be identified in the next chapter, which addresses the application of the prediction technique for threedimensional coupled vibro-acoustic problems.
192
Chapter 3
4. APPLICATION OF THE WAVE BASED PREDICTION TECHNIQUE FOR THREEDIMENSIONAL COUPLED VIBRO-ACOUSTIC PROBLEMS
4.1. Introduction This chapter presents the application of the wave based prediction technique for the steady-state dynamic analysis of three-dimensional coupled vibroacoustic systems, in which part of the boundary surface of the acoustic domain consists of a thin, flat plate. Section 4.2. indicates some specific modelling aspects, involved with the use of the prediction methodology, outlined in chapter 2, for the steady-state dynamic analysis of the out-of-plane bending motion in thin, flat plates. It describes how a set of structural wave functions, together with a particular solution function, provide an expansion for the normal displacement of the plate middle surface, which exactly satisfies the dynamic plate equation. This section describes also how a convergent, symmetric wave model for the determination of the wave function contributions in the proposed solution expansion is obtained from a weighted residual formulation of the boundary conditions. In contrast with a complete wave function set, recently proposed by LANGLEY (1997), the poor condition of the proposed wave model does not prevent the numerical results from converging towards the exact solution, as illustrated for some validation examples.
194
Chapter 4
Section 4.3 defines a complete set of acoustic wave functions for the expansion of the steady-state cavity pressure field in three-dimensional uncoupled interior acoustic systems. Based on this function set, the construction of a convergent wave model is performed in a completely similar way as for two-dimensional problems. The accuracy of the resulting uncoupled acoustic wave models is illustrated for a validation example, for which the wave model results are compared with experimental results, as well as prediction results from some finite element models. Section 4.4. describes how a structural and an acoustic wave model, defined in the two previous sections, are combined into a convergent wave model for the steady-state dynamic analysis of three-dimensional coupled vibroacoustic systems, in which part of the boundary surface of the acoustic domain consists of a thin, flat plate. For several validation examples, the prediction results, obtained from these coupled wave models, are compared with the results, obtained from corresponding Eulerian coupled FE/FE models. This comparison demonstrates the beneficial convergence rate of the wave based prediction technique, in that it provides highly accurate prediction results with a smaller computational effort than the finite element method. This section presents also an experimental validation of the wave based prediction technique, applied for the identification of the modal properties of a double-panel partition, which is a typical coupled vibroacoustic system that is often encountered in noise control engineering.
4.2. Uncoupled plate problems 4.2.1. Problem definition Figure 4.1. shows a thin, flat plate Ωs, in which an out-of-plane bending motion1 is induced by an external point2 force F, applied at location rsF(xF,yF) in the direction, normal to the plate middle surface. The force excitation has a harmonic time dependence with circular frequency ω. The thickness of the
1
2
the wave based prediction technique can also be applied for the prediction of the in-plane motion in flat plates, but this is not described here, since the vibroacoustic coupling interaction of a plate with the surrounding fluid influences only the out-of-plane plate displacement the general case of a distributed force excitation may be regarded as a superposition of point forces
Application for three-dimensional coupled vibro-acoustic problems
195
plate is t. The plate material has a density ρs, a Poisson coefficient ν, an elasticity modulus E and a material loss factor η.
Figure 4.1 : uncoupled flat plate problem
According to Kirchhoff’s thin plate theory (see appendix B), the steady-state displacement w of the plate middle surface, in the direction normal to the plate surface, is governed by the dynamic equation ∇ 4 w( rs ) − kb4 . w( rs ) =
F .δ ( rs , rsF ), D
rs ( x, y ) ∈ Ω s ,
(4.1)
where ∇4 =
∂4 ∂4 ∂4 + 2 + ∂x 4 ∂x 2∂y 2 ∂y 4
(4.2)
and where the plate bending stiffness D and the bending wavenumber kb are D=
Et 3 (1 + jη )
, 12(1 − ν 2 )
ρ tω 2 kb = 4 s . D
(4.3)
Since the dynamic equation (4.1) is a fourth-order equation, the displacement field w(x,y) is uniquely defined, if two boundary conditions are specified at each point on the plate boundary Γs. By defining the differential operators
196
Chapter 4
Lθ = −
∂ , ∂γ n
∂2 ∂2 Lm = − D 2 + v 2 , ∂γ s ∂γ n ∂ ∂2 ∂2 , LQ = − D + ( 2 − v ) ∂γ n ∂γ n2 ∂γ s2
(4.4) (4.5)
(4.6)
where γn and γs are, respectively, the normal and tangential directions of the plate boundary (see figure 4.1), the following expressions are obtained for the three major types of boundary conditions that may be specified on the plate boundary Γs ( Γ s = Γ wθ ∪ Γ mQ ∪ Γ wm ). • kinematic boundary conditions : w( rs ) = w ( rs ), rs ∈ Γ wθ , Lθ [ w( rs )] = θ n ( rs ), rs ∈Γ wθ ,
(4.7) (4.8)
where w and θ n are prescribed translational and rotational displacement functions. Note that boundary condition (4.7) imposes also a prescribed ∂w value for the rotational displacement component θ s = − . These ∂γ s kinematic boundary conditions are specified, for instance, at clamped plate boundaries. • mechanical boundary conditions : These boundary conditions impose prescribed functions qn , mn and mns for the shear forces and the bending and torsional moments along the boundary. Since only two boundary conditions can be applied, the prescribed shear force and torsional moment functions are combined into one generalised shear force function Qn (see appendix B), Lm [ w( rs )] = mn ( rs ), rs ∈ Γ mQ , LQ [ w( rs )] = Qn ( rs ) = qn ( rs ) +
∂mns ( rs ) , rs ∈ Γ mQ . ∂γ s
(4.9) (4.10)
Application for three-dimensional coupled vibro-acoustic problems
197
These boundary conditions are specified, for instance, at free plate boundaries. • mixed boundary conditions : At some parts of the plate boundary, one kinematic and one mechanical boundary condition may be specified. For simply supported plate boundaries, for instance, the normal displacement w and the bending moment mn have prescribed values, w( rs ) = w ( rs ), rs ∈ Γ wm , Lm [ w( rs )] = mn ( rs ), rs ∈ Γ wm .
(4.11) (4.12)
4.2.2. Field variable expansion The steady-state normal plate displacement w(x,y) is approximated as a solution expansion w(x, y) , w( x, y ) ≈ w ( x, y ) = �
ns
∑ ws .Ψ s ( x, y) + w F ( x, y) = [Ψ s ]{ws } + w F ( x, y) . (4.13) �
�
s=1
Each function Ψ s (x, y) in the (1xns) matrix [Ψ s ] is a structural wave function, which satisfies the homogeneous part of the dynamic equation (4.1),
Ψ s ( x, y ) = e
− j ( k xs . x + k ys . y )
(k xs2 + kys2 )
with
2
= kb4 .
(4.14) (4.15)
The contributions of these structural wave functions to the solution expansion are comprised in the (nsx1) vector {w s } . �
Function w F (x, y) is a particular solution function for the external force term in the inhomogeneous right-hand side of the dynamic equation (4.1). From all possible mathematical expressions, the physically meaningful expression for the displacement of an infinite plate, excited by a normal point force F, is selected as particular solution function (JUNGER and FEIT (1972)),
198
Chapter 4
w F ( x, y ) = −
jF
�
8 kb2 D
[H
]
( 2) ( 2) 0 ( kb r ) − H 0 ( − jk b r )
r = ( x − x F ) 2 + ( y − yF ) 2
with
(4.16)
(4.17)
and where H 0(2) is the zero-order Hankel function of the second kind. From the above definitions, it may be concluded that the proposed displacement expansion (4.13) satisfies a priori the dynamic plate equation (4.1), no matter what the values of the structural wave function contributions ws are.
4.2.3. Weighted residual wave model The contributions ws of the structural wave functions to the solution expansion (4.13) are determined by the boundary conditions, defined in (4.7)-(4.12). These boundary conditions may be transformed into a weighted residual or a least-squares formulation. This section describes only the construction of a weighted residual model for the determination of the wave function contributions. The construction of a Hermitian least-squares wave model follows a completely similar procedure, as outlined in section 2.4.1.2. However, as it is the case for two-dimensional coupled vibro-acoustic problems, illustrated in section 2.7.2.3., a least-squares wave model for uncoupled plate problems has a smaller convergence rate than a corresponding weighted residual wave model. weighted residual formulation of the boundary conditions Depending on the wave function contributions ws in expansion (4.13), some residual error functions are involved with the representation of the boundary conditions, rs ∈( Γ wθ ∪ Γ wm ), Rθ ( rs ) = Lθ [ w( rs )] − θ n ( rs ), rs ∈Γ wθ , Rm ( rs ) = Lm [ w( rs )] − mn ( rs ), rs ∈ (Γ mQ ∪ Γ wm ), Rw ( rs ) = w( rs ) − w ( rs ), �
(4.18)
�
�
RQ ( rs ) = LQ [ w( rs )] − Qn ( rs ),
rs ∈ Γ mQ .
(4.19) (4.20) (4.21)
Application for three-dimensional coupled vibro-acoustic problems
199
For the sake of model symmetry, which will become apparent later on, some additional residuals are defined at the corner points of the plate boundary Γs, at which the normal and tangential directions are not uniquely defined (see figure 4.2).
Figure 4.2 : normal and tangential directions at a corner point
For each of the nw corner points, which belong to the boundary part Γwθ∪Γwm, on which kinematic or mixed boundary conditions are specified, the additional residual is the approximation error for the normal plate displacement at the corner point location rsc, Rcw ( rsc ) = w( rsc ) − w ( rsc ),
c = 1.. nw .
(4.22)
For each of the nF corner points, which belong to the boundary part ΓmQ, on which mechanical boundary conditions are specified, the additional residual is the approximation error for the concentrated corner point force, which is associated with the discontinuity of the torsional moment, RcF ( rsc )
(
= LF [ w ] − mns ( rsc+ ) − mns ( rsc− ) �
)
∂ 2 w( r ) ∂ 2 w( rsc ) − mns ( rsc+ ) − mns ( rsc− ) , = − D(1 − ν ) + sc+ − − − ∂γ n ∂γ s ∂γ n ∂γ s
(
)
c = 1.. n F .
(4.23) In the proposed weighted residual formulation of the boundary conditions, the above defined residual error functions are orthogonalised with respect to some weighting functions, which are obtained from applying the differential operators, involved with the definition of the various residuals, on a ~, weighting function w
200
Chapter 4
~
~
∫ LQ [ w ]. Rw . dΓ + ∫ Lm [ w ]. Rθ . dΓ −
Γ wθ + Γ wm
Γ wθ
~. R . dΓ + − ∫w Q Γ mQ
~
Γ wm + Γ mQ
nw
nF
c=1
c=1
∑ LF [ w~ ]. Rcw ( rsc ) −
∫ Lθ [ w ]. Rm . dΓ
∑ w~(rsc ). RcF ( rsc ) = 0.
(4.24)
As proposed in section 2.4.1.1., the structural wave function contributions ws are determined, such that the weighted residual formulation (4.24) is ~ , which can be expanded in terms of satisfied for any weighting function w the same set of structural wave functions Ψ s , used in the displacement expansion (4.13). This yields a weighted residual wave model of the form
[ Ass ]{ws } = { fs } .
(4.25)
The element on row si and column sj of the (nsxns) matrix [ Ass ] is
[ Ass ]si s j
=
∫ LQ [Ψ si ].Ψ s j . dΓ + ∫ Lm [Ψ si ]. Lθ [Ψ s j ]. dΓ Γ wθ + Γ wm Γ wθ
−
∫ Lθ [Ψ si ]. Lm [Ψ s j ]. dΓ − ∫ Ψ si . LQ [Ψ s j ]. dΓ
Γ wm + Γ mQ
+
Γ mQ
nw
nF
c=1
c=1
∑ LF [Ψ si ].Ψ s j ( rsc ) − ∑ Ψ si ( rsc ). LF [Ψ s j ]
and the element on row si of the (nsx1) vector
{ f s } si
�
�
Γ wθ + Γ wm
Γ wθ
∫ Lθ [Ψ si ].( mn - Lm [ w F ]). dΓ − ∫ Ψ si .(Qn − LQ [ w F ]). dΓ
−
�
Γ wm + Γ mQ
−
{ fs } is
∫ LQ [Ψ si ].( w − w F ). dΓ + ∫ Lm [Ψ si ].(θ n − Lθ [ w F ]). dΓ
=
+
(4.26)
nw
�
Γ mQ
∑ LF [Ψ si ].( w ( rsc ) − w F ( rsc ))
c=1 nF
�
∑ LF [Ψ si ].( mns ( rsc+ ) − mns ( rsc- ) − LF [ w F ])
c=1
�
(4.27)
Application for three-dimensional coupled vibro-acoustic problems
201
model properties As already indicated in section 2.4.2., matrix [ Ass ] is a fully populated matrix, whose elements are complex and frequency dependent. The symmetry of this matrix is proven as follows. Consider two structural wave functions Ψ s i and Ψ s j , which satisfy the homogeneous part of the dynamic equation (4.1), i.e. ∇ 2 (∇ 2Ψ s i ) = kb4 .Ψ s i and ∇ 2 (∇ 2Ψ s j ) = kb4 .Ψ s j .
(4.28)
Since these wave functions are smooth and non-singular in the plate surface domain Ωs with boundary Γs, the two-dimensional version of Green’s second identity (see equation (2.51)) implies that
∫ Ψ si . ∇
2
Ωs
(∇ 2Ψ s j ). dΩ =
∫ ∇ Ψ s i . ∇ Ψ s j . dΩ + ∫ Ψ s i . 2
2
Ωs
Γs
∂ (∇ 2Ψ s j ) ∂γ n
. dΓ −
∂Ψ si
∫ ∂γ n
Γs
(4.29) . ∇ Ψ s j . dΓ 2
After some rearrangements of the integration functions, this expression becomes
∫ Ψ si . ∇
2
Ωs
(∇ 2Ψ s j ). dΩ =
2 ∂ 2Ψ s j ∂ ∂ Ψsj ). dΓ ∫ ∇ Ψ si . ∇ Ψ s j . dΩ + ∫ Ψ si . ∂γ ( 2 + ( 2 − ν ) ∂γ n ∂γ s2 n Ωs Γs
−
2
2
∂Ψ si
∂ 2Ψ s j
∫ ∂γ n
Γs
−
∂Ψ si
∫ ∂γ n
Γs
.(
∂γ n2
.((1 − ν )
+ν
∂ 2Ψ s j ∂γ s2
∂ 2Ψ s j ∂γ s2
∂ 2Ψ s j ∂ ). dΓ − ∫ Ψ s i . ((1 − ν ) ). dΓ ∂γ n ∂γ s2 Γs
(4.30)
). dΓ .
By using the differential operators, defined in (4.4)-(4.6), this expression may be written as
202
Chapter 4
∫ Ψ si . ∇
Ωs
−
2
(∇ 2Ψ s j ). dΩ =
2 2 ∫ ∇ Ψ si . ∇ Ψ s j . dΩ
Ωs
1 ∫ (Ψ si . LQ [Ψ s j ] + Lθ [Ψ si ]. Lm [Ψ s j ]). dΓ DΓ
(4.31)
s
−(1 − ν )
∫ (Ψ si .
Γs
∂ 3Ψ s j ∂γ n∂γ s2
2 ∂Ψ si ∂ Ψ s j + . ). dΓ . ∂γ n ∂γ s2
Since the plate boundary Γs is a closed curve, the application of integration by parts on the last line integral term in (4.31) (see e.g. REKTORYS (1977)) yields, −(1 − ν )
∫ (Ψ si .
Γs
∂ 3Ψ s j ∂γ n ∂γ s2
2 ∂Ψ si ∂ Ψ s j + . ). dΓ = ∂γ n ∂γ s2
2 n +n ∂Ψ si ∂ Ψ s j ∂ 2Ψ si ∂Ψ s j 1 w F (1 − ν ) ∫ ( . + . ). dΓ − ∑ LF [Ψ s j ].Ψ si D ∂γ ∂γ ∂γ ∂γ ∂γ ∂γ s n s c =1 n s s Γs
+(1 − ν )
nw + n F
∑
c=1
∂Ψ si ( rsc ) ∂Ψ s j ( rsc ) ∂Ψ si ( rsc ) ∂Ψ s j ( rsc ) . . . − ∂γ n+ ∂γ s+ ∂γ n− ∂γ s− (4.32)
The substitution of (4.28) and (4.32) into (4.31) yields k b4 ∫ Ψ s i .Ψ s j . dΩ = Ωs
1
2 2 ∫ ∇ Ψ si . ∇ Ψ s j . dΩ − D ∫ (Ψ si . LQ [Ψ s j ] + Lθ [Ψ si ]. Lm [Ψ s j ]). dΓ
Ωs
Γs
2 ∂Ψ si ∂ Ψ s j ∂ 2Ψ si ∂Ψ s j 1 nw + nF (1 − ν ) ∫ ( . + . ). dΓ − ∑ LF [Ψ s j ].Ψ si ( rsc ) ∂γ s ∂γ n ∂γ s ∂γ n ∂γ s ∂γ s D c=1 Γs
+(1 − ν )
∂Ψ si ( rsc ) ∂Ψ s j ( rsc ) ∂Ψ s i ( rsc ) ∂Ψ s j ( rsc ) − . ∂γ + . ∂γ + − − ∂γ ∂γ c=1 n s n s
nw + n F
∑
(4.33)
Application for three-dimensional coupled vibro-acoustic problems
203
Interchanging the indices i and j in (4.33) yields k b4 ∫ Ψ s j .Ψ s i . dΩ = Ωs
1 2 2 ∫ ∇ Ψ s j . ∇ Ψ si . dΩ − D ∫ (Ψ s j . LQ [Ψ si ] + Lθ [Ψ s j ]. Lm [Ψ si ]). dΓ
Ωs
Γs
(1 − ν )
∂Ψ s j
∂ 2Ψ si
∂ 2Ψ s j
∂Ψ si
∫ ∂γ ∂γ n ∂γ s ∂γ s s ∂γ n ∂γ s (
.
+
Γs
+(1 − ν )
.
). dΓ −
1 nw + n F ∑ LF [Ψ si ].Ψ s j ( rsc ) D c=1
∂Ψ s j ( rsc ) ∂Ψ si ( rsc ) ∂Ψ s j ( rsc ) ∂Ψ si ( rsc ) − . ∂γ + . ∂γ + − − ∂γ ∂γ c=1 n s n s
nw + nF
∑
(4.34) Since the left-hand sides of expressions (4.33) and (4.34) are identical, their right-hand sides are also identical. By equating these right-hand sides and using the following identity,
∂Ψ si ∂Ψ s j
∂Ψ si ∂Ψ s j ∂Ψ s j ∂Ψ si ∂Ψ s j ∂Ψ si − − + ∂γ n+ ∂γ s+ ∂γ n− ∂γ −s ∂γ n+ ∂γ +s ∂γ n− ∂γ −s ∂Ψ s j ∂Ψ si + ∂Ψ s j ∂Ψ s i = n x+ + n y+ − n y + n x+ ∂x ∂y ∂x ∂y ∂Ψ s j ∂Ψ si − ∂Ψ s j ∂Ψ s i − n y + n x− − n x− + n y− ∂x ∂y ∂x ∂y
(4.35)
∂Ψ s j ∂Ψ s j ∂Ψ si ∂Ψ si − n y+ − n x+ + n y+ + n x+ ∂x ∂y ∂x ∂y ∂Ψ s j ∂Ψ s j + n x− + n y− ∂x ∂y
− ∂Ψ s i ∂Ψ si − −ny + n x ∂x ∂y
=0,
where (n x+ ,n y+ ) and (n x− ,n y− ) are the unit vectors in the normal directions
γ n+ and γ n− , respectively, the following expression is obtained
204
Chapter 4
∫ (Ψ s j . LQ [Ψ si ] + Lθ [Ψ s j ]. Lm [Ψ si ]). dΓ +
Γs
=
nw + n F
∑ LF [Ψ si ].Ψ s j ( rsc )
c=1
nw + n F
∫ (Ψ si . LQ [Ψ s j ] + Lθ [Ψ si ]. Lm [Ψ s j ]). dΓ + ∑ LF [Ψ s j ].Ψ si ( rsc ). c=1
Γs
Since Γ s = Γ wθ ∪ Γ mQ ∪ Γ wm , this expression may be written as
(4.36)
∫ LQ [Ψ si ].Ψ s j . dΓ + ∫ Lm [Ψ si ]. Lθ [Ψ s j ]. dΓ
Γ wθ + Γ wm
Γ wθ
∫ Lθ [Ψ si ]. Lm [Ψ s j ]. dΓ − ∫ Ψ si . LQ [Ψ s j ]. dΓ
−
Γ wm + Γ mQ nw
nF
c=1
c=1
+ ∑ LF [Ψ s i ].Ψ s j ( rsc ) − = −
+
Γ mQ
∑ Ψ si ( rsc ). LF [Ψ s j ]
∫ LQ [Ψ s j ].Ψ si . dΓ + ∫ Lm [Ψ s j ]. Lθ [Ψ si ]. dΓ Γ wθ + Γ wm Γ wθ ∫ Lθ [Ψ s j ]. Lm [Ψ si ]. dΓ − ∫ Ψ s j . LQ [Ψ si ]. dΓ Γ wm + Γ mQ Γ mQ nw
∑
c=1
LF [Ψ s j ].Ψ s i ( rsc ) −
nF
∑ Ψ s j ( rsc ). LF [Ψ si ].
c=1
(4.37) It follows from the matrix element definition formula (4.26) that expression (4.37) proves the symmetry of matrix [ Ass ] , i.e.
[ Ass ]si s j = [ Ass ]s j si
(∀si , s j = 1.. ns ) .
(4.38)
4.2.4. Convergence requirements complete wave function set As outlined in section 2.5., a convergent displacement expansion (4.13) is obtained, if the structural wave functions Ψ s are selected from a complete wave function set, which can represent any possible homogeneous displacement field in the plate domain Ωs, i.e. any possible displacement
Application for three-dimensional coupled vibro-acoustic problems
205
field, which satisfies the homogeneous part of the dynamic plate equation (4.1). It is proven below that an expansion of type w( x, y ) = w1 ( x, y ) + w 2 ( x, y ) �
�
�
(4.39)
with w1 ( x, y ) = �
2 2 s π s π − j k b2 − 1 . y j k b2 − 1 . y Lx Lx ∞ + ws 1 , 2 . e + (4.40) s1πx w s 1 ,1. e cos( ) ∑ 2 2 L s s π π x s1 = 0 − j − k b2 − 1 . y j − k b2 − 1 . y Lx Lx w + ws 1 ,4 . e s1 ,3 . e and
w 2 ( x, y ) = �
2 2 s π s π − j k b2 − 2 . x j k b2 − 2 . x Ly Ly ∞ + ws 2 ,2 . e + (4.41) s 2πy w s 2 ,1. e ∑ cos( L ) 2 2 y s2 = 0 2 s 2π 2 s 2π − j − kb − . − − . x j k x b L Ly y + ws 2 ,4 . e ws 2 ,3 . e
can represent any possible homogeneous displacement field in a rectangular plate domain with dimensions LxxLy. Since each function in the latter expansion satisfies the homogeneous part of the dynamic plate equation and since this equation is a fourth-order partial differential equation, it is sufficient to prove that the latter expansion can represent a homogeneous displacement field with arbitrary rotational displacement and generalised shear force distributions along the rectangular boundary Γs (see figure 4.3). Hence, it must be proven that the contributions ws1,1, ws1,2, ws1,3, ws1,4, ws2,1, ws2,2, ws2,3 and ws2,4 in the proposed expansion (4.39) can be determined, such that
206
Chapter 4
Figure 4.3 : general homogeneous displacement field in a rectangular plate
∂w( 0, y ) ( y ∈ [ 0, Ly ]) , = θ n 1 ( y ), ∂x ∂w( Lx , y ) ( y ∈ [ 0, Ly ]) , = −θ n 2 ( y ), ∂x ∂ 2θ n1 ( y ) ∂ 3 w( 0, y ) Qn1 ( y ) = − (2 − ν ) , ( y ∈ [ 0, Ly ]) , D ∂x 3 ∂y 2 �
(4.42)
�
(4.43)
�
∂ 3 w( Lx , y ) Qn 2 ( y ) ∂ 2θ n 2 ( y ) =− + (2 − ν ) , ( y ∈ [ 0, Ly ]) , D ∂x 3 ∂y 2 ∂w( x ,0 ) = θ n 3 ( x ), ( x ∈ [ 0, Lx ]) , ∂y ∂w( x , Ly ) = −θ n 4 ( x ), ( x ∈ [ 0, L x ]) , ∂y
(4.44)
�
(4.45)
�
(4.46)
�
∂ 2θ n 3 ( x ) ∂ 3 w( x,0 ) Qn 3 ( x ) = − (2 − ν ) , D ∂y 3 ∂x 2
(4.47)
�
∂ 3 w( x, Ly ) ∂y 3
Q (x) ∂ 2θ n 4 ( x ) , = − n4 + (2 − ν ) D ∂x 2
By defining (s2=0,1,...)
( x ∈ [ 0, L x ]) ,
(4.48)
( x ∈ [ 0, Lx ]) .
(4.49)
Application for three-dimensional coupled vibro-acoustic problems
207
Ws 2 ,1 = j
kb2
2 2 (4.50) s 2π s 2π 2 ( w s , 2 − w s ,1 ) + j − k b − ( w s , 4 − w s , 3 ), − L 2 2 2 2 Ly y
Ws 2 , 2 = 2
j
k b2
s π − 2 ( w s 2 , 2 . e Ly
j
s π k b2 − 2 Ly
2
−j
. Lx
− w s 2 ,1 . e 2
2
s π + j − kb2 − 2 ( w s 2 , 4 . e Ly
s π j − k b2 − 2 . L x Ly
s π k b2 − 2 Ly
2
. Lx
) 2
− ws 2 , 3 . e
s π − j − k b2 − 2 . L x Ly
)
(4.51)
Ws 2 , 3 = 3
2 2 s 2π ( w s ,1 − w s , 2 ) + j kb − 2 2 Ly
Ws 2 , 4 =
3
2 2 s 2π j − kb − ( w s 2 , 3 − w s 2 , 4 ), Ly (4.52)
s π
3
2
s π
2
2 j k b2 − 2 . L x − j k b2 − 2 . L x 2 s 2π Ly Ly ( w s ,1 . e j kb − − w . e ) s , 2 2 2 Ly 3
s π
2
s π
2
2 − j − k b2 − 2 . L x j − k b2 − 2 . L x L s π y Ly + j − kb2 − 2 ( w s 2 , 3 . e − ws 2 ,4 . e ) Ly (4.53)
the conditions (4.42)-(4.45) become
208
Chapter 4 ∞
s πy Ws 2 ,1 .cos( 2 ) = θ n 1 ( y ) , Ly s2 = 0
∑
(4.54)
∞
s πy Ws 2 , 2 .cos( 2 ) = −θ n 2 ( y ) , Ly s2 = 0
(4.55)
Q ( y) ∂ 2θ n1 ( y ) s πy Ws 2 , 3 .cos( 2 ) = n 1 − (2 − ν ) , Ly D ∂y 2 s2 = 0
(4.56)
∑
∞
∑
∞
Q ( y) ∂ 2θ n 2 ( y ) s πy Ws 2 , 4 .cos( 2 ) = − n 2 + (2 − ν ) . Ly D ∂y 2 s2 = 0
∑
(4.57)
As mentioned in section 2.5.2., any (piecewise continuous) function, defined in y ∈]0, L y [ , can be represented as a series expansion in terms of the s πy functions cos( 2 ) (s2=0,1,...). Hence, a set of coefficients Ws2,1, Ws2,2, Ws2,3 Ly
and Ws2,4 (s2=0,1,...) can be found, such that conditions (4.54)-(4.57) are satisfied. The substitution of these coefficients into (4.50)-(4.53) yields a set of contributions ws2,1, ws2,2, ws2,3 and ws2,4 such that the conditions (4.42)-(4.45) are satisfied. In a completely similar way, a set of contributions ws1,1, ws1,2, ws1,3 and ws1,4 may be found, such that the conditions (4.46)-(4.49) are satisfied. The above defined complete wave function set for plate problems with rectangular domains allows the construction of a convergent displacement expansion for any type of uncoupled plate problems. According to the procedure, described in section 2.5.3., the convergence of a weighted residual wave model of type (4.25) is ensured • by decomposing the plate domain into some convex subdomains or at least into some subdomains, such that an arbitrary homogeneous displacement field, defined in each subdomain, may be considered as part of a homogeneous displacement field, defined in a rectangular domain, circumscribing the subdomain • and by approximating the displacement field in each subdomain in terms of an expansion
Application for three-dimensional coupled vibro-acoustic problems
w( x, y ) = !
+
209
n s1
∑ ( ws1 ,1.Ψ s1 ,1 ( x, y) + ws 1 ,2 .Ψ s 1 ,2 ( x, y))
s1 = 0 n s2
∑ (ws 2 ,1 .Ψ s 2 ,1 ( x, y) + ws 2 ,2 .Ψ s 2 ,2 ( x, y)) + w F ( x, y)
(4.58)
"
s2 = 0
where
Ψ s1 ,1 ( x, y ) = cos( k xs 1, 1 . x ). e
− jk ys1 , 1 . y
Ψ s1 , 2 ( x, y ) = cos( k xs1, 2 . x ). e Ψ s 2 ,1 ( x , y ) = e Ψ s 2 , 2 ( x, y ) = e
− jk xs2 , 1 . x − jk xs2 , 2 . x
,
− jk ys1 , 2 . y
,
(4.59)
.cos( k ys 2, 1. y ), .cos( k ys 2, 2 . y ),
with 2
s π sπ ( k xs 1 ,1 , k ys 1 ,1 ) = ( 1 ,± kb2 − 1 ), Lx Lx 2
s π sπ ( k xs 1 , 2 , k ys 1 , 2 ) = ( 1 ,± j k b2 + 1 ), Lx Lx 2
s π s π ( k xs 2 ,1 , k ys 2 ,1 ) = ( ± kb2 − 2 , 2 ), Ly Ly
(4.60)
2
( k xs 2 , 2 , k ys 2 , 2 ) = ( ± j
k b2
s π s π + 2 , 2 ). Ly L y
and where Lx and Ly are the dimensions of the rectangular domain, circumscribing the considered subdomain. wave function truncation In a similar way as described in section 2.6.3., a rule of thumb may be formulated for the specification of the integer truncation values ns1 and ns2 in the displacement expansion (4.58).
210
Chapter 4
The smallest spatial periods in the x- and y-direction, associated with the wave functions, defined in (4.59), are
λ x,min =
2Lx , ns 1
λ y,min =
2 Ly ns 2
.
(4.61)
The spatial variation of the steady-state dynamic plate response is strongly related to the (undamped) bending wavelength
λb = 4
4π 4 Et 2 3ρ s ω 2 ( 1 − ν 2 )
.
(4.62)
The proposed truncation rule is based on the requirement that the smallest period of the cosine wave functions in the displacement expansion should be not larger than half the undamped bending wavelength, i.e.
λ x,min ≈ λ y,min ≤
λb . 2
(4.63)
As a result, the integer values ns1 and ns2 should be specified, such that3 ns 1 Lx
≈
ns 2 Ly
≥
4 . λb
(4.64)
linear independence of the wave functions Recall from section 2.5.4. that the linear independence of all 4(ns1+1)+4(ns2+1) wave functions in the truncated set must be verified in order to avoid the singularity of the wave model. When the excitation frequency ω corresponds, for instance, with an undamped natural frequency of the circumscribing rectangular plate domain with simply supported boundaries, i.e.
ω = π 2(
3
s12
s 22 Et 2 + ) L2x L2y 12ρ s (1 − ν 2 )
( s1 , s 2 = 0,1,...) ,
(4.65)
note that this truncation rule assumes that the spatial periods of the prescribed dynamic quantities, specified at the plate boundaries, are not smaller than λb
Application for three-dimensional coupled vibro-acoustic problems
211
it follows from (4.60) that not all wave functions are linearly independent and that some wave functions must be eliminated to restore the linear independence without reducing the span of the wave function set.
4.2.5. Some validation examples In this section, the numerical convergence of the proposed weighted residual wave model (4.25) is illustrated for two uncoupled plate problems, one with a convex plate domain, and one, for which the plate domain must be decomposed into two subdomains. convex Figure 4.4. shows a convex plate, of which the boundaries are assumed to be clamped, i.e. with zero translational and normal rotational displacement components ( w ≡ 0, θ n ≡ 0 ). The considered case consists of an aluminium plate (E=70.109 N/m2, ρs=2790 kg/m3, ν=0.3, t=0.002 m) with material loss factor η=0.1, excited by a normal point force F=1 N, applied at (xF,yF)= (0.25*Lx, 0.25*Ly) at ω=2π.250 Hz. For this case, a weighted residual wave model is built with 104 structural wave functions (ns1=16,ns2=8), associated with the enclosing rectangular domain LxxLy=1m x 0.5m.
Figure 4.4 : convex plate with clamped boundaries
Figure 4.5 shows the resulting contour plots of the real and imaginary parts of the normal plate displacement. This figure clearly illustrates that the proposed wave model provides an accurate representation of the clamped boundary conditions. Since the displacement expansion exactly satisfies the
212
Chapter 4
dynamic plate equation, it may be concluded that the proposed wave model converges towards the exact solution.
Figure 4.5 : contour plots of the real (upper) and imaginary (lower) parts of the normal plate displacement at 250 Hz.
As described in section 2.7.2.1., the numerical convergence may also be illustrated by the convergence curves. Figure 4.6 plots these curves for the amplitudes of the normal displacement predictions at location (x,y)=(0.4m,0.3m) at three excitation frequencies, i.e. 250 Hz, 500 Hz and 1000 Hz. The ‘TR’ marks on this figure indicate the prediction errors for those wave models, for which the structural wave function set is truncated at the smallest integer values ns1 and ns2, satisfying the truncation rule (4.64). domain decomposition Figure 4.7 shows a concave plate, whose boundaries are assumed to be clamped. A convergent wave model may be obtained by decomposing the plate domain into two convex subdomains and by expanding the
Application for three-dimensional coupled vibro-acoustic problems
213
displacement fields w1 and w2 in these subdomains in terms of the structural wave functions, associated with the circumscribing rectangular domains with dimensions Lx1xLy and Lx2xLy, respectively (see figure 4.7).
Figure 4.6 : structural convergence curves at 250 Hz (∇), 500 Hz (+) and 1000 Hz (o)
Figure 4.7 : concave plate with clamped boundaries
In a similar way as described in section 2.5.4., the coupling of the two subdomain wave models results from the boundary conditions, specified at
214
Chapter 4
the common interface between both subdomains. Since the dynamic plate equation is a fourth-order partial differential equation, four boundary conditions are specified at the common interface, i.e. continuity of the normal displacement, continuity of the normal in-plane rotational displacement, equilibrium of the generalised shear forces and equilibrium of the bending moments. The considered case consists of an undamped aluminium plate (E=70.109 N/m2, ρs=2790 kg/m3, ν=0.3, t=0.002 m, η=0.1), excited by a normal point force F=1 N, applied at (x1F,y1F)= (0.5*Lx1, 0.3*Ly) with a circular frequency ω=2π.300 Hz. For this case, a weighted residual wave model is built with 80 structural wave functions (ns1=10,ns2=8), associated with the rectangular domain Lx1xLy=0.6m x 0.5m, circumscribing the first subdomain, and with 64 structural wave functions (ns1=6,ns2=8), associated with the rectangular domain Lx2xLy=0.4m x 0.5m, circumscribing the second subdomain. Figure 4.8 shows the resulting contour plot of the real part of the normal plate displacement. Again, the accurate representation of the clamped boundary conditions as well as the subdomain interface boundary conditions illustrates that the numerical implementation of the proposed wave model converges towards the exact solution.
Figure 4.8 : contour plot of the real part of the normal plate displacement at 300 Hz
Application for three-dimensional coupled vibro-acoustic problems
215
4.2.6. Comparison with an existing complete function set This section compares the prediction results of the wave model, proposed in the previous section for solving the convex plate problem, shown in figure 4.4, with the prediction results, obtained with the wave function expansion, recently proposed by LANGLEY (1997),
w( x, y ) =
ns
∑ ws . e
− jk b cos(
2πs )x ns + 1
− jk b sin(
.e
2πs )y ns + 1
s=0
+
ns
∑ ws . e
s=0
− k b cos(
2πs )x ns + 1
− k b sin(
.e
2πs )y ns + 1
(4.66) + w F ( x, y ). �
In order to compare the numerical convergence, involved with the use of expansions (4.66) and (4.58), several wave models have been constructed with an increasing number of degrees of freedom, i.e. an increasing number of wave functions. Figure 4.9 shows the resulting real and imaginary parts of the normal plate displacement at (x,y)=(0.4m,0.3m) at ω=2π.1000 Hz. This figure confirms the numerical convergence, involved with the wave function set, proposed in this dissertation, and confirms also the conclusion by LANGLEY (1997), in that, despite the theoretical convergence of the displacement expansion (4.66), its numerical implementation involves severe convergence problems. A verification of the Picard conditions, discussed in section 2.7.1., reveals also the numerical convergence problems, involved with the wave function expansion (4.66). Figure 4.10 shows that, in contrast with the new wave function expansion (4.58), a wave model, using the existing wave function expansion (4.66), doesn’t satisfy the Picard conditions : a substantial decay of the singular value curve occurs already at large singular values and the coefficients β i, associated with the small singular values σi, are significantly larger than these singular values.
216
Chapter 4
Figure 4.9 : real (upper) and imaginary (lower) part of the normal plate displacement at (x,y)=(0.4m,0.3m) at 1000 Hz, obtained with the new wave function expansion (4.58) (solid) and with the existing wave function expansion (4.66) (dashed)
Application for three-dimensional coupled vibro-acoustic problems
217
Figure 4.10 : Picard test for a wave model, using the new (upper) and the existing wave function expansion (lower)
4.3. Uncoupled interior acoustic problems 4.3.1. Problem definition The steady-state pressure field p at any position r(x,y,z), induced by a timeharmonic external point source excitation q with circular frequency ω,
218
Chapter 4
located at rq(xq,yq,zq) in the three-dimensional cavity domain V of an uncoupled interior acoustic system, is governed by the inhomogeneous Helmholtz equation (see appendix A) ∇ 2 p( r ) + k 2 . p( r ) = − jρ 0ωq.δ ( r , rq ),
r ∈V .
(4.67)
By specifying one boundary condition at each point on the closed boundary surface Ωa of the cavity domain V, the pressure field is uniquely defined. Three major types of boundary conditions occur in uncoupled interior acoustic problems ( Ωa = Ω p ∪ Ωv ∪ Ω Z ), p( r ) = p ( r ),
r ∈Ω p ,
j ∂p( r ) = vn ( r ), ρ 0ω ∂n j ∂p( r ) p( r ) = , ρ 0 ω ∂n Z (r )
(4.68)
r ∈Ω v ,
(4.69)
r ∈Ω Z ,
(4.70)
where p , vn and Z are prescribed pressure, normal velocity and normal impedance functions, respectively.
4.3.2. Field variable expansion The steady-state pressure p(x,y,z) in the cavity is approximated as a solution expansion p(x, y, z) , p( x, y, z ) ≈ p( x , y, z ) = �
na
∑ pa .Φ a ( x, y, z ) + pq ( x, y, z ) = [Φ a ]{ pa } + pq ( x, y, z ). �
�
a=1
(4.71) Each function Φ a (x, y, z) in the (1xna) matrix [Φ a ] is an acoustic wave function, which satisfies the homogeneous part of the Helmholtz equation (4.67),
Φ a ( x, y, z ) = e
− j ( k xa . x + k ya . y + k za . z )
(4.72)
Application for three-dimensional coupled vibro-acoustic problems
219
2 2 2 k xa + k ya + k za = k2.
with
(4.73)
The contributions of these acoustic wave functions to the solution expansion are comprised in the (nax1) vector { pa } . �
Function pq (x, y, z) is a particular solution function for the external acoustic source term in the inhomogeneous right-hand side of the Helmholtz equation (4.67). From all possible mathematical expressions, the physically meaningful Green’s kernel function, defined in (1.15), is selected as particular solution function, − jk ( x − x ) 2 + ( y − y ) 2 + ( z − z ) 2
q q q jρ 0ωq e p q ( x , y, z ) = . 4π ( x − x q ) 2 + ( y − yq ) 2 + ( z − z q ) 2 �
(4.74)
From the above definitions, it may be concluded that the proposed pressure expansion (4.71) satisfies a priori the Helmholtz equation (4.67), no matter what the values of the acoustic wave function contributions pa are.
4.3.3. Weighted residual wave model The contributions pa of the acoustic wave functions to the solution expansion (4.71) are determined in a completely similar way as described in section 2.4.1.1. A weighted residual formulation of the boundary conditions (4.68)-(4.70) yields a wave model of type
[ Aaa ]{ pa } = { fa } . The (naxna) matrix [ Aaa ] and the (nax1) vector
(4.75)
{ fa }
are defined in (2.28)
and (2.31), in which the integral terms, defined on boundary surface Ωs, are omitted, since fluid-structure coupling interfaces are absent in uncoupled acoustic systems.
220
Chapter 4
4.3.4. Convergence requirements complete wave function set The definition of a complete three-dimensional wave function set, ensuring the convergence of the pressure expansion (4.71), is readily obtained as an extension of the two-dimensional definition, described in section 2.5. For the case of a rectangular cavity domain with dimensions LxxLyxLz, it is sufficient to define a set of acoustic wave functions, which satisfy the homogeneous part of the Helmholtz equation (4.67) and which can represent a homogeneous pressure field with an arbitrary normal fluid velocity distribution v1(x,y), v2(x,y), v3(y,z), v4(y,z), v5(x,z) and v6(x,z), along the rectangular boundary surface (see figure 4.11).
Figure 4.11 : general homogeneous pressure field in a rectangular prism
This problem may be split into three subproblems, each of them having two opposite side walls with a non-zero normal fluid velocity distribution, while the four other side walls are perfectly rigid. One of these subproblems consists of determining the pressure field p1(x,y,z), satisfying the homogeneous Helmholtz equation ∇ 2 p1 ( x, y, z ) + k 2 . p1 ( x, y, z ) = 0
and the boundary conditions ∂ p1 ( L x , y , z ) ∂p1 ( 0, y, z ) =0 , = 0, ( y ∈ [ 0, L y ], z ∈ [ 0, Lz ]), ∂x ∂x
(4.76)
(4.77)
Application for three-dimensional coupled vibro-acoustic problems
221
∂p1 ( x , L y , z ) ∂p1 ( x ,0, z ) =0 , = 0, ( x ∈ [ 0, L x ], z ∈ [ 0, Lz ]), (4.78) ∂y ∂y ∂p1 ( x, y, Lz ) ∂p1 ( x, y,0 ) = − jρ 0ωv1 ( x, y ) , = jρ 0ωv 2 ( x, y ), ∂z ∂z (4.79) ( x ∈ [ 0, L x ], y ∈ [ 0, L y ]). By separation of variables, the pressure field p1 ( x, y, z ) = X ( x )Y ( y ) Z ( z )
(4.80)
is governed by three ordinary differential equations d 2X 2
+ α 2. X = 0 ,
(4.81)
2
+ β 2.Y = 0 ,
(4.82)
dx d 2Y dy d 2Z dz
2
+ ( k 2 − α 2 − β 2 ). Z = 0 ,
(4.83)
where α and β are arbitrary constants. Solving equation (4.81), subject to the boundary conditions (4.77), implies that α=a1π/Lx (a1=0,1,...), so that a πx X ( x ) = A. cos 1 , Lx
( a1 = 0,1,... ),
(4.84)
where A is an arbitrary constant. Similarly, solving equation (4.82), subject to the boundary conditions (4.78), implies that β =a2π/Ly (a2=0,1,...), so that a πy Y ( y ) = B.cos 2 Ly
where B is an arbitrary constant. The general solution of equation (4.83) is
( a 2 = 0,1,...) ,
(4.85)
222
Chapter 4
Z ( z ) = C. e
− j ( k 2 −α 2 − β 2 )z
+ D. e
j ( k 2 −α 2 − β 2 )z
,
(4.86)
resulting in a pressure field p 1 ( x , y, z ) = ∞
∞
∑ ∑ cos(k xa 1 x ).cos(k ya 2 y).( pa 1a 2 ,1 . e
a1 = 0 a 2 = 0
− jk za1a2 z
+ pa 1 a 2 , 2 . e
jk za1a2 z
),
(4.87) with 2
2 a π a1π a 2π 2 a1π k xa 1 = , k ya 2 = and k za1 a 2 = k − − 2 . (4.88) Lx Ly Lx Ly
The arbitrary constants pa1a2,1 and pa1a2,2 are determined by the boundary conditions (4.79), ∞
∞
∑ ∑ Pa1 a 2 ,1 .cos( k xa 1 x ).cos( k ya 2 y) = v1 ( x, y)
,
(4.89)
,
(4.90)
a1 = 0 a 2 = 0 ∞
∞
∑ ∑ Pa 1a 2 ,2 .cos( k xa 1 x ).cos( k ya 2 y) = v 2 ( x, y)
a1 = 0 a 2 = 0
with Pa1 a 2 ,1 =
k za 1 a 2
ρ 0ω
( p a 1 a 2 ,1 . e
Pa1 a 2 , 2 =
− jk za1a2 L z
k za1 a 2
ρ 0ω
− pa1 a 2 , 2 . e
jk z ,mn L z
( pa 1 a 2 , 2 − pa 1 a 2 ,1 ) .
),
(4.91) (4.92)
The left-hand sides of (4.89) and (4.90) are double Fourier series (half-range cosine series). For all (piecewise continuous) functions v1(x,y) and v2(x,y), two sets of constants Pa1a2,1 and Pa1a2,2 can be found, such that both series converge to v1(x,y) and v2(x,y) (see e.g. BERG and MCGREGOR (1964)). In a completely similar way, a convergent pressure expansion can be defined for the two other subproblems.
Application for three-dimensional coupled vibro-acoustic problems
223
As a result, the homogeneous pressure field with an arbitrary normal fluid velocity distribution along the boundary surface of a rectangular cavity may be expressed as p( x, y, z ) =
∞
∞
∑ ∑ pa1a 2 .cos(k xa1 x ).cos(k ya 2 y). e
− jk za1a2 z
a1 = 0 a2 = 0
+ +
∞
∞
∑ ∑ pa 3 a 4 .cos(k xa 3 x ). e
− jk ya1a2 y
a3 = 0 a4 = 0 ∞
∞
∑ ∑ pa 5 a 6 . e
a 5 = 0 a6 = 0
− jk xa5 a6 x
.cos( k za 4 z )
(4.93)
.cos( k ya 5 y ).cos( k za 6 z )
with 2
2 a π a1π a 2π 2 a1π ( k xa 1 , k ya 2 , k za 1 a 2 ) = ( , ,± k − − 2 ), Lx Ly Lx Ly
2
2
a π a π a π a π ( k xa 3 , k ya 3 a 4 , k za 4 ) = ( 3 ,± k 2 − 3 − 4 , 4 ), Lx Lz Lx Lz
(4.94)
2
2 a 5π a 6 π a 5 π a6 π ( k xa 5 a 6 , k ya 5 , k za 6 ) = ( ± k − − L , L , L ). Ly z y z 2
This complete wave function set for homogeneous acoustic problems with rectangular cavity domains allows the construction of a convergent pressure expansion for any type of uncoupled interior acoustic problem. According to the procedure, described in section 2.5.3., the convergence of a weighted residual wave model of type (4.75) is ensured • by decomposing the cavity domain into some convex subdomains or at least into some subdomains, such that an arbitrary homogeneous pressure field, defined in each subdomain, may be considered as part of a homogeneous pressure field, defined in a rectangular domain, circumscribing the subdomain • and by approximating the pressure field in each subdomain in terms of an expansion
224
Chapter 4
p( x, y, z ) =
n a1
n a2
n a3
n a4
∑ ∑ pa1 a 2 .Φ a 1a 2 ( x, y, z ) + ∑ ∑ pa 3 a 4 .Φ a 3 a 4 ( x, y, z )
�
a1 = 0 a 2 = 0
+
n a5
a3 = 0 a4 = 0
n a6
∑ ∑ pa 5 a 6 .Φ a 5 a 6 ( x, y, z ) + pq ( x, y, z ) �
a 5 = 0 a6 = 0
(4.95) where
Φ a 1a 2 ( x , y, z ) = cos( k xa 1 x ).cos( k ya 2 y ). e Φ a 3 a 4 ( x, y, z ) = cos( k xa 3 x ). e Φ a 5 a 6 ( x, y, z ) = e
− jk xa5a6 x
− jk ya3a4 y
− jk za1a2 z
,
.cos( k za 4 z ),
(4.96)
.cos( k ya 5 y ).cos( k za 6 z ).
and where Lx, Ly and Lz in the definition formula (4.94) of the wavenumber components are the dimensions of the rectangular domain, circumscribing the considered subdomain. wave function truncation Assuming that the spatial periods of the prescribed acoustic quantities, specified on the cavity boundary surface, are not smaller than the acoustic wavelength, a truncation rule may be based on the requirement that the smallest period of the cosine wave functions in the pressure expansion (4.95) is not larger than half the acoustic wavelength. As a result, the integer truncation values na1, na2, na3, na4, na5 and na6 should be specified, such that na1 Lx
≈
na2 Ly
≈
na 3 Lx
≈
na 4 Lz
≈
na 5 Ly
≈
na 6 Lz
≥
2k . π
(4.97)
linear independence of the wave functions In order to avoid the singularity of the wave model, the linear independence of all 2(na1+1)(na2+1)+2(na3+1)(na4+1)+2(na5+1)(na6+1) wave functions in the truncated set must be verified. When the excitation frequency ω corresponds, for instance, with an undamped natural frequency of the circumscribing rectangular cavity with side walls, assumed to be perfectly rigid, i.e.
Application for three-dimensional coupled vibro-acoustic problems
225
2
2 2 n π n π n π ω = c. 1 + 2 + 3 Lz Lx Ly
( n1 , n 2 , n 3 = 0,1,...) ,
(4.98)
it follows from (4.94) that not all wave functions are linearly independent and that some wave functions must be eliminated to restore the linear independence without reducing the span of the wave function set.
4.3.5. Validation example To illustrate the accuracy of the proposed acoustic wave model, the pressure field in the cavity of a simplified car model is predicted, using the measured structural velocity distribution of the enclosing car body as boundary conditions to the car cavity. The wave model prediction results are compared with finite element predictions and with the measured cavity pressure field. Figure 4.12 shows the simplified car model. It consists of a stiff beam structure (rigid body frame) and a subframe, which are connected through some rubber mounts. The engine excitation is simulated by exciting a mass with an electrodynamic shaker. The mass is isolated from the subframe by means of four rubber mounts. Aluminium panels of 3mm thickness are sealed to the beam structure with silicone to constitute the car cavity.
Figure 4.12 : simplified car model (exploded view)
226
Chapter 4
The steady-state normal structural velocity of the aluminium car body panels is obtained from scanning the panels with a laser vibrometer on a dense grid of measurement points. These measurements are used as normal fluid velocity boundary conditions in both a wave model and a finite element model for the cavity pressure field. The car model cavity is discretized into 9600 linear hexahedral fluid elements, such that the node locations on the cavity boundary surface coincide with the measurement grid points (see figure 4.13). The resulting finite element model has 11067 nodal pressure degrees of freedom and a maximum bandwidth of 340.
Figure 4.13 : finite element discretization of the cavity
The cavity wave model consists of 370 acoustic wave functions (na1=na3=10, na2=na5=6,na4=na6=5), associated with the circumscribing rectangular domain with dimensions 1.5m x 0.975m x 0.8m (see figure 4.12). In order to make sure that the wave model and the finite element model are based on the same normal velocity input, the spatial velocity distribution, used for the calculation of the wave model elements, results from a linear interpolation of the measured data. Note also that the number of wave functions is larger than required by the truncation rule (4.97), since the spatial period of the
Application for three-dimensional coupled vibro-acoustic problems
227
boundary panel displacements is substantially smaller than the acoustic wavelength in the considered frequency range. Figure 4.14 compares the pressure spectrum, measured at some position in the cavity, with the predicted spectra, obtained with the finite element and the wave model.
Figure 4.14 : cavity pressure spectra and prediction errors
Especially around the natural frequencies of the cavity (see 214 Hz, 219 Hz and 243 Hz), where the acoustic response is very sensitive to the velocity input, the substantially smaller wave model yields a better prediction accuracy than the finite element model. This illustrates the fact that the convergence rate of the wave based prediction technique benefits from the fluid velocity expansions, having the same spatial variation as the pressure expansions.
4.4. Coupled vibro-acoustic problems This section describes how a structural and an acoustic wave model, defined in sections 4.2 and 4.3, are combined into a convergent wave model for the steady-state dynamic analysis of interior coupled vibro-acoustic systems, in which part of the boundary surface of the acoustic domain consists of a thin, flat plate.
228
Chapter 4
4.4.1. Problem definition When a part of the closed boundary surface Ωa of a bounded acoustic domain V consists of an elastic structural surface Ωs (Ωs ⊆ Ωa) and when a time-harmonic external point source excitation q with circular frequency ω is applied at location rq(xq,yq,zq) in the acoustic domain V, the steady-state pressure field p at any position r(x,y,z) is uniquely characterised by the inhomogeneous Helmholtz equation ∇ 2 p( r ) + k 2 . p( r ) = − jρ 0ωq.δ ( r , rq ),
r ∈V ,
(4.99)
together with the specification of one boundary condition at each point on the boundary surface Ωa = Ω p ∪ Ωv ∪ Ω Z ∪ Ωs , p( r ) = p ( r ),
r ∈Ω p ,
j ∂p( r ) = vn ( r ), r ∈ Ω v , ρ 0ω ∂n j ∂p( r ) p( r ) = , r ∈Ω Z , ρ 0 ω ∂n Z (r ) j ∂p( r ) = jωw( r ), r ∈ Ω s , ρ 0 ω ∂n
(4.100) (4.101) (4.102) (4.103)
where p , vn and Z are prescribed pressure, normal velocity and normal impedance functions, respectively, and where w is the steady-state displacement field of the elastic structural surface Ωs in the direction, normal to this surface. When the elastic structural surface consists of a thin, flat plate, an orthogonal co-ordinate system (x’,y’) may be defined in the plane of the plate middle surface. In this way, the geometry of the plate middle surface may be described in the global Cartesian co-ordinate system (x,y,z) by using a bilinear parametrization of the form x = u x ( x’, y’) = u x,0 + u x , x’. x’+u x , y’. y’, ∀ r( x, y, z ) ∈ Ω s : y = u y ( x’, y’) = u y,0 + u y, x’. x’+u y, y’. y’, î z = u z ( x’, y’) = u z ,0 + uz , x’. x’+u z , y’. y’,
(4.104)
Application for three-dimensional coupled vibro-acoustic problems
229
where ui,0, ui,x’ and ui,y’ (i=x,y,z) are constant values. When a time-harmonic external point force excitation F with circular frequency ω is applied at plate location rF(x’F,y’F) in the direction, normal to the plate middle surface Ωs, the steady-state normal displacement field w of the plate middle surface is governed by the dynamic plate equation ∇ 4 w( x’, y’) − kb4 . w( x’, y’) = F.δ ( r ( x’, y’), rF ( x’F , y’F )) p(u x ( x’, y’), u y ( x’, y’), uz ( x’, y’)) + . D D (4.105) Note that the positive sign of the pressure loading term in the right-hand side of this equation indicates that the normal plate displacement is assumed to have a positive orientation away from the acoustic domain. For a unique characterisation of the normal displacement field, two boundary conditions should be specified at each point on the plate boundary Γs. In a completely similar way as in uncoupled plate problems, the three major types of plate boundary conditions, defined in equations (4.7)-(4.12), may occur in coupled vibro-acoustic problems.
4.4.2. Field variable expansions Since the steady-state pressure field in a coupled vibro-acoustic system is governed by the same Helmholtz equation as in uncoupled acoustic systems (see (4.67) and (4.99)), the same pressure expansion is used, as proposed in section 4.3. for uncoupled interior acoustic problems. Provided that the bounded acoustic domain is convex or that its geometry is at least such that any homogeneous pressure field in the acoustic domain may be considered as part of a homogeneous pressure field, defined in a rectangular domain, circumscribing the acoustic domain4, the steady-state pressure field p(x,y,z) in the acoustic domain is approximated as a solution expansion p(x, y, z) , �
4
if the domain geometry doesn’t satisfy this condition, the acoustic domain must be decomposed into some subdomains, whose geometries do satisfy this condition; in a completely similar way, as described in section 2.5.4. for twodimensional coupled vibro-acoustic problems, the acoustic part of the coupled vibro-acoustic wave model results then from a weighted residual or least-squares formulation of the acoustic boundary conditions (4.100)-(4.103), together with the interface conditions, specified along the common interfaces of the various acoustic subdomains
230
Chapter 4 na
∑ pa .Φ a ( x, y, z ) + pq ( x, y, z ) = [Φ a ]{ pa } + pq ( x, y, z ),
p( x, y, z ) ≈ p( x , y, z ) =
�
a=1
(4.106) where na
∑ p a . Φ a ( x , y, z ) =
a=1
+ +
n a3
n a1
n a2
∑ ∑ pa1 a 2 .cos( k xa1 x ) cos(k ya 2 y)e
a1 = 0 a 2 = 0
n a4
∑ ∑ pa 3 a 4 .cos(k xa 3 x )e
a3 = 0 a4 = 0 n a5
n a6
∑ ∑
− jk za1a2 z
pa 5 a 6 . e
− jk xa5 a6 x
− jk ya3a4 y
(4.107)
cos( k za 4 z )
cos( k ya 5 y )cos( k za6 z )
a 5 = 0 a6 = 0
and where the function pq (x, y, z) , defined in (4.74), serves as particular solution function for the external acoustic source term in the inhomogeneous right-hand side of the Helmholtz equation (4.99). The definition formula for the wavenumber components (k xa 1 ,k ya 2 , k za 1 a 2 ) , (k xa 3 ,k ya 3 a 4 , k za 4 ) and (k xa 5 a 6 ,k ya 5 ,k za 6 ) of the acoustic wave functions in (4.107) are given in
(4.94), in which Lx, Ly and Lz are the dimensions of the (smallest) rectangular domain, circumscribing the considered acoustic domain V. Compared with the dynamic equation (4.1) for uncoupled plate problems, the dynamic plate equation (4.105) for coupled vibro-acoustic problems contains an additional excitation term for the pressure loading effect of the fluid on the plate. As a result, the expansion for the normal plate displacement, as proposed in section 4.2 for uncoupled plate problems, must be extended with some particular solution functions for the fluid pressure loading. Therefore, the steady-state normal plate displacement w(x’,y’) is approximated as a solution expansion w(x’, y’) ,
w( x’, y’) ≈ w( x’, y’) = �
ns
∑ ws .Ψ s ( x’, y’) +
s=1
na
∑ pa . wa ( x’, y’) + w F ( x’, y’) + wq ( x’, y’) �
�
�
a=1
= [Ψ s ]{w s } + [ w a ]{ pa } + w F ( x’, y’) + w q ( x’, y’). �
�
�
(4.108)
Application for three-dimensional coupled vibro-acoustic problems
231
Provided that the plate domain Ωs is convex or that its geometry is at least such that any homogeneous displacement field in the plate domain may be considered as part of a homogeneous displacement field, defined in a rectangular domain, circumscribing the plate domain5, the structural wave function expansion in (4.108) is ns1
ns
∑ w s .Ψ s ( x’, y’) = ∑
s= 1
s1 = 0
+
ns2
∑
s2 = 0
− jk − jk y’ y’ cos( k x’s1 x’). w s1 ,1 . e y’s1 ,1 + w s1 , 2 . e y’s1 , 2
− jk − jk x’ x’ cos( k y’s2 y’). w s2 ,1 . e x ’s2 ,1 + w s2 , 2 . e x ’s2 , 2 ,
(4.109) where the wavenumber components of the structural wave functions are defined as 2
s π sπ ( k x’s 1 , k y’s 1 ,1 ) = ( 1 ,± kb2 − 1 ), Lx’ Lx’ 2
s π sπ ( k x’s 1 , k y’s 1 , 2 ) = ( 1 ,± j kb2 + 1 ), Lx’ Lx’ 2
s π s π ( k x’s 2 ,1 , k y’s 2 ) = ( ± kb2 − 2 , 2 ), L y’ L y’
(4.110)
2
( k x’s 2 , 2 , k y’s 2 ) = ( ± j
kb2
s π s π + 2 , 2 ), L y’ L y’
in which Lx’ and Ly’ are the dimensions of the (smallest) rectangular plate domain, circumscribing the considered plate domain Ωs. 5
if the domain geometry doesn’t satisfy this condition, the plate domain must be decomposed into some subdomains, whose geometries do satisfy this condition; in a completely similar way, as illustrated in section 4.2.5. for uncoupled problems, the structural part of the coupled vibro-acoustic wave model results then from a weighted residual or least-squares formulation of the plate boundary conditions (4.7)-(4.12), together with the interface conditions, specified along the common interfaces of the various plate subdomains
232
Chapter 4
In a similar way as described in section 4.2.2. for uncoupled plate problems, the displacement of an infinite plate, excited by a normal point force, serves as particular solution function w F (x’, y’) for the external point force term in the inhomogeneous right-hand side of the dynamic plate equation (4.105), �
w F ( x’, y’) = − �
jF 8 k b2 D
[H
( 2) 0 ( kb r ) −
H 0( 2) ( − jk b r )
]
r = ( x’− x’F ) 2 + ( y’− y’F ) 2
with
(4.111)
(4.112)
Each function wa (x’, y’) in the (1xna) matrix [ w a ] is a particular solution function for the part of the pressure loading term in the inhomogeneous right-hand side of the dynamic plate equation (4.105), which results from one of the acoustic wave functions Φ a in the pressure expansion (4.106). The normal displacement of an infinite plate, excited by this pressure distribution, may be used as particular solution function, �
�
w a ( x’, y’) = �
−
Φ (u (ξ ,ζ ), u (ξ , ζ ), u (ξ ,ζ )). H ( 2) ( k ρ )dζ dξ a x y z b ∫ 0 8 kb2 D 0 f (ξ ) s1
+
Φ (u (ξ , ζ ), u (ξ ,ζ ), u (ξ ,ζ )). H ( 2) ( − jk ρ )dζ dξ y z b ∫ ∫ a x 0 8 kb2 D 0 f (ξ ) s1
j
with
j
L x ’ f s 2 (ξ )
∫
(4.113)
L x ’ f s 2 (ξ )
ρ = ( x’−ξ ) 2 + ( y’−ζ ) 2
(4.114)
and where the functions fs1 and fs2 describe the geometry of the plate boundary Γs (see figure 4.15). In a similar way, function w q (x’, y’) in the displacement expansion (4.108), �
which is a particular solution function for the part of the pressure loading term in the inhomogeneous right-hand side of the dynamic plate equation (4.105), which results from the external acoustic excitation function pq (x, y, z) in the pressure expansion (4.106), may be expressed as �
Application for three-dimensional coupled vibro-acoustic problems
233
Figure 4.15 : plate boundary description
wq ( x’, y’) = �
−
( 2) dξ p u u u H k d ( ( ξ , ζ ), ( ξ , ζ ), ( ξ , ζ )). ( ρ ) ζ q x y z b ∫ ∫ 0 2 8 k b D 0 f (ξ ) s1
+
( 2) dξ . p u ξ ζ u ξ ζ u ξ ζ H jk ρ d ζ ( ( , ), ( , ), ( , )). ( − ) q x y z b ∫ 0 8 k b2 D 0 f (ξ ) s1
j
j
L x ’ f s 2 (ξ ) �
(4.115)
L x ’ f s 2 (ξ )
∫
�
Due to the flat shape of the considered plate, alternative expressions for the particular solution functions wa (x’, y’) may be defined, which have no direct physical meaning, but which are preferred to expressions of type (4.113), since they don’t involve the surface integral evaluations. Based on the expression (4.107) for the acoustic wave function expansion, these alternative particular solution functions may be written in the form �
[ wa ]{ pa } = �
n a3
n a4
na
∑ pa . wa ( x’, y’) =
a=1
n a1
n a2
∑ ∑ pa1 a 2 . wa1 a 2 ( x’, y’) + !
a1 = 0 a 2 = 0 n a5
n a6
(4.116)
∑ ∑ pa 3 a 4 . wa 3 a 4 ( x’, y’) + ∑ ∑ pa 5 a 6 . wa 5 a6 ( x’, y’). "
a3 = 0 a4 = 0
#
a 5 = 0 a6 = 0
$
The particular solution functions w a1 a 2 (x’, y’) in (4.116) are defined as
234
Chapter 4
w a1 a 2 ( x’, y’) = %
B1, a 1 a 2 .cos( k xa 1 . u x ( x’, y’)).cos( k ya 2 . u y ( x’, y’)) + B2, a1 a 2 .cos( k xa1 . u x ( x’, y’)).sin( k ya 2 . u y ( x’, y’)) − jk za1a2 u z ( x’, y’) . e + B3, a1 a 2 .sin( k xa 1 . u x ( x’, y’)).cos( k ya 2 . u y ( x’, y’)) + B 4, a 1 a 2 .sin( k xa 1 . u x ( x’, y’)).sin( k ya 2 . u y ( x’, y’)) (4.117) where 1 1 1 1 1 B1, a1 a 2 = ( + + + ), 4 D A1, a1 a 2 A2, a 1 a 2 A3, a1 a 2 A4, a 1 a 2 B2, a 1 a 2 =
j 1 1 1 1 (− − + + ), 4 D A1, a1 a 2 A2, a 1 a 2 A3, a1 a 2 A4, a1 a 2
j 1 1 1 1 (− + − + ), B3, a 1 a 2 = 4 D A1, a1 a 2 A2, a 1 a 2 A3, a1 a 2 A4, a 1 a 2 B4, a 1 a 2 =
(4.118)
1 1 1 1 1 (− + + − ), 4 D A1, a 1 a 2 A2, a 1 a 2 A3, a1 a 2 A4, a1 a 2
with 2 2 ( k xa 1 u x, x’ + k ya 2 u y, x’ + k za1 a 2 u z, x’ ) 4 A1, a 1 a 2 = − kb , 2 + ( k u + k u + k u ) ya 2 y, y’ za 1 a 2 z , y’ xa1 x , y’ 2 2 ( − k xa1 u x , x’ + k ya 2 u y, x’ + k za 1 a 2 u z , x’ ) 4 A2, a 1 a 2 = − kb , 2 +( − k u + k u + k u ) xa 1 x , y’ ya 2 y, y’ za 1 a 2 z, y’ 2 2 ( k xa 1 u x , x’ − k ya 2 u y, x’ + k za1 a 2 u z, x’ ) 4 A3, a 1 a 2 = − kb , 2 +(k u − + ) k u k u ya 2 y, y’ za 1 a 2 z , y’ xa 1 x, y’ 2 2 ( − k xa1 u x , x’ − k ya 2 u y, x’ + k za 1 a 2 u z , x’ ) 4 − kb . (4.119) A4, a1 a 2 = 2 +( − k u − + ) k u k u xa 1 x , y’ ya 2 y, y’ za 1 a 2 z, y’ &
The particular solution functions w a 3 a 4 (x’, y’) in (4.116) are defined as
Application for three-dimensional coupled vibro-acoustic problems
235
w a 3 a 4 ( x’, y’) = '
B1, a 3 a 4 .cos( k xa 3 . u x ( x’, y’)).cos( k za 4 . uz ( x’, y’)) + B2, a 3 a 4 .cos( k xa 3 . u x ( x’, y’)).sin( k za 4 . u z ( x’, y’)) − jk ya3a4 u y ( x’, y’) . e + B3, a 3 a 4 .sin( k xa 3 . u x ( x’, y’)).cos( k za 4 . u z ( x’, y’)) + B 4, a 3 a 4 .sin( k xa 3 . u x ( x’, y’)).sin( k za 4 . u z ( x’, y’)) (4.120) where 1 1 1 1 1 + + + B1, a 3 a 4 = ( ), 4 D A1, a 3 a 4 A2, a 3 a 4 A3, a 3 a 4 A4, a 3 a 4 B2, a 3 a 4 =
1 1 1 1 j (− − + + ), 4 D A1, a 3 a 4 A2, a 3 a 4 A3, a 3 a 4 A4, a 3 a 4
1 1 1 1 j (− + − + ), B3, a 3 a 4 = 4 D A1, a 3 a 4 A2, a 3 a 4 A3, a 3 a 4 A4, a 3 a 4 B4, a 3 a 4 =
(4.121)
1 1 1 1 1 (− + + − ), 4 D A1, a 3 a 4 A2, a 3 a 4 A3, a 3 a 4 A4, a 3 a 4
with 2 2 ( k xa 3 u x , x’ + k ya 3 a 4 u y, x’ + k za 4 u z, x’ ) 4 A1, a 3 a 4 = − kb , 2 +( k u + k u + k u ) ya 3 a 4 y, y’ za 4 z , y’ xa 3 x , y’ 2 2 ( − k xa 3 u x, x’ + k ya 3 a 4 u y, x’ + k za 4 u z , x’ ) 4 A2, a 3 a 4 = − kb , 2 +( − k u + k u + k u ) xa 3 x , y’ ya 3 a 4 y, y’ za 4 z, y’ 2 2 ( k xa 3 u x , x’ + k ya 3 a 4 u y, x’ − k za 4 u z, x’ ) 4 A3, a 3 a 4 = − kb , 2 +(k u + − ) k u k u ya 3 a 4 y, y’ za 4 z , y’ xa 3 x , y’ 2 2 ( − k xa 3 u x , x’ + k ya 3 a 4 u y, x’ − k za 4 u z, x’ ) 4 − k b . (4.122) A4, a 3 a 4 = 2 +( − k u + − ) k u k u xa 3 x , y’ ya 3 a 4 y, y’ za 4 z , y’ (
The particular solution functions w a 5 a 6 (x’, y’) in (4.116) are defined as
236
Chapter 4
w a 5 a 6 ( x’, y’) = )
B1, a 5 a 6 .cos( k ya 5 . u y ( x’, y’)).cos( k za 6 . u z ( x’, y’)) + B2, a 5 a 6 .cos( k ya 5 . u y ( x’, y’)).sin( k za 6 . u z ( x’, y’)) − jk xa5 a6 u x ( x’, y’) . e + B3, a 5 a 6 .sin( k ya 5 . u y ( x’, y’)).cos( k za 6 . u z ( x’, y’)) + B 4, a 5 a 6 .sin( k ya 5 . u y ( x’, y’)).sin( k za6 . u z ( x’, y’)) (4.123) where 1 1 1 1 1 B1, a 5 a 6 = ( + + + ), 4 D A1, a 5 a 6 A2, a 5 a 6 A3, a 5 a 6 A4, a 5 a 6 B2, a 5 a 6 =
1 1 1 1 j (− − + + ), 4 D A1, a 5 a 6 A2, a 5 a 6 A3, a 5 a 6 A4, a 5 a 6
j 1 1 1 1 (− + − + ), B3, a 5 a 6 = 4 D A1, a 5 a 6 A2, a 5 a 6 A3, a 5 a 6 A4, a 5 a 6 B4, a 5 a 6 =
(4.124)
1 1 1 1 1 (− + + − ), 4 D A1, a 5 a 6 A2, a 5 a 6 A3, a 5 a 6 A4, a 5 a 6
with 2 2 ( k xa 5 a 6 u x , x’ + k ya 5 u y, x’ + k za 6 u z , x’ ) 4 A1, a 5 a 6 = − kb , 2 +(k u + k u + k u ) ya 5 y, y’ za 6 z, y’ xa 5 a 6 x , y’ 2 2 ( k xa 5 a 6 u x , x’ − k ya 5 u y, x’ + k za 6 u z , x’ ) 4 A2, a 5 a 6 = − kb , 2 + ( k u − k u + k u ) ya 5 y, y’ za 6 z, y’ xa 5 a 6 x , y’ 2 2 ( k xa 5 a 6 u x , x’ + k ya 5 u y, x’ − k za 6 u z , x’ ) 4 A3, a 5 a 6 = − kb , 2 + ( k u + k u − k u ) ya 5 y, y’ za 6 z, y’ xa 5 a 6 x , y’ 2 2 ( k xa 5 a 6 u x , x’ − k ya 5 u y, x’ − k za 6 u z , x’ ) 4 − kb . (4.125) A4, a 5 a 6 = 2 + ( k − − ) u k u k u ya 5 y, y’ za 6 z, y’ xa 5 a 6 x , y’
Application for three-dimensional coupled vibro-acoustic problems
237
From the above definitions, it may be concluded that the proposed acoustic and structural expansions (4.106) and (4.108) exactly satisfy, respectively, the Helmholtz equation (4.99) and the dynamic plate equation (4.105), no matter what the values of the wave function contributions pa and ws are.
4.4.3. Coupled vibro-acoustic wave model The contributions pa (a=1..na) and ws (s=1..ns) of the acoustic and structural wave functions to the solution expansions (4.106) and (4.108) are determined by the acoustic boundary conditions, defined in (4.100)-(4.103), and by the structural boundary conditions, defined in (4.7)-(4.12). These boundary conditions may be transformed into a weighted residual or a leastsquares formulation. This section describes only the construction of a weighted residual model for the determination of the wave function contributions. The construction of a least-squares wave model follows a completely similar procedure, as outlined in section 2.4.1.2. However, as it is the case for two-dimensional coupled vibro-acoustic problems, illustrated in section 2.7.2.3., a least-squares wave model for three-dimensional coupled vibro-acoustic problems has a smaller convergence rate than a corresponding weighted residual wave model. weighted residual formulation of the structural boundary conditions Since the structural boundary conditions in the considered coupled vibroacoustic problems are completely similar to the boundary conditions in uncoupled plate problems, the residual error functions, involved with the representation of the structural boundary conditions, are obtained from the substitution of the displacement expansion (4.108) into the definition formula (4.18)-(4.23). As proposed in section 4.2.3. for uncoupled plate problems, the use of these residual error functions in the weighted residual formulation (4.24) yields a set of ns algebraic equations in the ns unknown structural wave contributions ws and the na unknown acoustic wave contributions pa,
[ Ass
w s Csa ] = { fs } . î pa
(4.126)
The elements of the symmetric (nsxns) matrix [ Ass ] are defined in (4.26). The element on row si and column aj of the (nsxna) matrix [ C sa ] is
238
[Csa ]si a j
Γ wθ + Γ wm
�
Γ wθ
Γ wm + Γ mQ nw
Γ mQ
nF
(4.127)
∑ LF [Ψ si ]. wa j (rsc ) − ∑ Ψ si ( rsc ). LF [ wa j ]
c=1
c=1
and the element on row si of the (nsx1) vector =
�
∫ Lθ [Ψ si ]. Lm [ wa j ]. dΓ − ∫ Ψ si . LQ [ wa j ]. dΓ
−
{ f s } si
�
∫ LQ [Ψ si ]. wa j . dΓ + ∫ Lm [Ψ si ]. Lθ [ wa j ]. dΓ
=
+
�
�
Chapter 4
��� � �
{ fs } is
���
�
∫ LQ [Ψ si ].( w − w F − wq ). dΓ + ∫ Lm [Ψ si ].(θ n − Lθ [ w F + wq ]). dΓ
Γ wθ + Γ wm
−
Γ wθ
∫ Lθ [Ψ si ].( mn - Lm [ w F + wq ]). dΓ − ∫ Ψ si .(Qn − LQ [ w F + wq ]). dΓ Γ wm + Γ mQ Γ mQ nw
�
+ ∑ LF [Ψ si ].( w ( rsc ) − w F ( rsc ) − w q ( rsc )) c=1 nF
+ − ∑ LF [Ψ s i ].( mns ( rsc ) − mns ( rsc ) − LF [ w F + w q ]). c=1
(4.128) weighted residual formulation of the acoustic boundary conditions Since the acoustic boundary conditions in two- and three-dimensional coupled vibro-acoustic problems are completely similar, the residual error functions, involved with the representation of the acoustic boundary conditions (4.100)-(4.103), are obtained from the substitutions of the pressure expansion (4.106) and the displacement expansion (4.108) into the definition formula (2.21)-(2.24). As proposed in section 2.4.1.1. for twodimensional coupled vibro-acoustic problems, the use of these residual error functions in the weighted residual formulation (2.25) yields a set of na algebraic equations in the ns unknown structural wave contributions ws and the na unknown acoustic wave contributions pa,
Application for three-dimensional coupled vibro-acoustic problems
[Cas
239
w s Aaa + Caa ] = { fa } . pa
(4.129)
The (naxna) matrices [ Aaa ] and [ Caa ] , the (naxns) matrix [ Cas ] and the (nax1) vector
{ fa }
are defined in, respectively, (2.28), (2.29), (2.30) and
(2.31). coupled vibro-acoustic wave model The coupled vibro-acoustic wave model is obtained from the combination of the algebraic equations (4.126) and (4.129) into a square set of ns+na algebraic equations in the ns unknown structural wave contributions ws and the na unknown acoustic wave contributions pa, Ass C as
w s f s = . Aaa + Caa pa fa Csa
(4.130)
Recall from section 2.4.2. that this coupled vibro-acoustic wave model is
[Csa ]T ≠ [Cas ] and [Caa ]T ≠ [Caa ] . Only acoustic and structural submatrices [ Aaa ] and [ Ass ] are symmetric.
non-symmetric, since
the
wave function truncation A rule of thumb for the specification of the integer truncation values ns1 and ns2 in the structural wave function expansion (4.109) and the integer truncation values na1, na2, na3, na4, na5 and na6 in the acoustic wave function expansion (4.107) can be readily obtained as a three-dimensional extension of the truncation rule for two-dimensional coupled vibro-acoustic problems, defined in section 2.6.3., together with the truncation rule for uncoupled plate problems, defined in section 4.2.4. Based on the requirement that the smallest spatial periods of the acoustic and structural wave functions in the pressure and displacement expansions (4.106) and (4.108) should be not larger than half the (undamped) structural bending wavelength λb, defined in (4.62), the integer truncation values should be specified, such that na1 Lx
≈
na 2 Ly
≈
na 3 Lx
≈
na 4 Lz
≈
na 5 Ly
≈
na 6 Lz
≈
ns 1 L x’
≈
ns 2 L y’
≥
4 . λb
(4.131)
240
Chapter 4
Recall also from sections 4.2.4. and 4.3.4. that the linear independence of all ns=4(ns1+1)(ns2+1) structural wave functions Ψs and the linear independence of all na=2(na1+1)(na2+1)+2(na3+1)(na4+1)+2(na5+1)(na6+1) acoustic wave functions Φa must be verified a priori, in order to avoid the singularity of the wave model (4.130).
4.4.4. Performance comparison with coupled FE/FE models validation examples In order to illustrate the accuracy of the proposed wave model (4.130) for three-dimensional coupled vibro-acoustic problems and to compare its convergence rate with the convergence rate of an Eulerian coupled FE/FE model (1.22), two validation examples are considered, one with a convex and one with a concave cavity domain. Figure 4.16 shows the first validation example. One boundary surface of an acoustic cavity consists of a flat rectangular (Lx’=0.75 m, Ly’= 0.5 m) plate with clamped boundaries, while all other cavity boundary surfaces are perfectly rigid. The air in the cavity has an ambient fluid density ρ0=1.225 kg/m3 and a speed of sound c=340 m/s. The undamped (η=0) aluminium plate has a thickness t=2.10-3 m, a density ρs=2790 kg/m3, a Poisson coefficient ν=0.3 and an elasticity modulus E=70.109 N/m2. The acoustic cavity is comprised in the volume of an enclosing rectangular prism with dimensions Lx=1.5 m, Ly=0.5 m, Lz=1 m. The coupled vibro-acoustic system is excited by a time-harmonic mechanical point force F, applied at location (x’F,y’F)=(2Lx’/3,Ly’/3) on the plate, in the direction normal to the plate.
Figure 4.16 : interior coupled vibro-acoustic system (example 1)
Application for three-dimensional coupled vibro-acoustic problems
241
Figure 4.17 shows the second validation example. One boundary surface of a funnel-type acoustic cavity consists of a flat rectangular (Lx’=1 m, Ly’= 0.5 m) plate with clamped boundaries, while all other cavity boundary surfaces are perfectly rigid. The fluid properties of the air in the cavity and the material properties of the plate are the same as in the first validation example. The dimensions, indicated in figure 4.17, are Lx1=1 m, Lx2=0.6 m, Ly=0.5 m, Lz1=0.5 m and Lz2=0.3 m. The coupled vibro-acoustic system is excited by a time-harmonic mechanical point force F, applied at location (x1,F,y1,F)=(Lx1/4,Ly/4) on the plate, in the direction normal to the plate.
Figure 4.17 : interior coupled vibro-acoustic system (example 2)
coupled vibro-acoustic wave models For the first validation example, the steady-state cavity pressure p(x,y,z) is approximated as an expansion of type (4.106), using the acoustic wave functions Φa, which are associated with the circumscribing rectangular domain LxxLyxLz (see figure 4.16). The steady-state normal plate displacement w(x’,y’) is approximated as an expansion of type (4.108), using the structural wave functions Ψs, which are associated with the considered rectangular plate domain Lx’xLy’ (=(Lx-0.75*Lz)xLy).
242
Chapter 4
For the second validation example, the acoustic cavity is decomposed into two subcavities. The expansion for the steady-state pressure p1(x1,y1,z1) in the first subcavity utilises the acoustic wave functions, which are associated with the circumscribing rectangular domain Lx1xLyxLz1. The expansion for the steady-state pressure p2(x2,y2,z2) in the second subcavity utilises the acoustic wave functions, which are associated with this rectangular subcavity Lx2xLyxLz2 (see figure 4.17). The expansion for the steady-state normal plate displacement w(x1,y1) utilises the structural wave functions, which are associated with the considered rectangular plate domain Lx1xLy. To illustrate the accuracy of the proposed wave based prediction technique, the prediction results for the field variable distributions in the second validation example are shown for the case of a unit normal point force excitation at 250 Hz.
Figure 4.18 : instantaneous plate displacement (a) and fluid displacement (b), normal to the plate-cavity interface at 250 Hz
Application for three-dimensional coupled vibro-acoustic problems
243
Figure 4.18 shows the instantaneous normal plate displacement and normal fluid displacement along the plate-cavity interface, obtained from a wave model, which consists of 72 structural and 444 acoustic wave functions. This figure illustrates that the clamped plate boundary conditions and the displacement continuity conditions along the plate-cavity interface are accurately represented.
Figure 4.19 : contour plot of the instantaneous cavity pressure at 250 Hz in the plane y1=0.25*Ly
Figure 4.20 : contour plot of the instantaneous cavity pressure at 250 Hz in the plane x1=0.25*Lx1
244
Chapter 4
Figures 4.19 and 4.20 show the contour plots of the corresponding instantaneous cavity pressure in the planes y1=0.25*Ly and x1=0.25*Lx1. Since the pressure contour lines are perpendicular to the rigid boundary surfaces of the cavity, the zero normal fluid velocity conditions at these boundary surfaces are accurately represented. The continuity of the pressure contour lines at the common interface (z1=Lz1, z2=0) between both subcavities indicates that the continuity conditions of the pressure and normal fluid velocity are accurately represented. Since the above figures illustrate that all structural and acoustic boundary conditions are accurately represented and since the proposed field variable expansions satisfy a priori the dynamic equations, it may be concluded that a highly accurate approximation of the exact coupled vibro-acoustic response is obtained. comparison with coupled FE/FE models In order to compare the proposed wave based prediction technique with the the finite element method in terms of accuracy and associated computational efforts for three-dimensional coupled vibro-acoustic analysis, the two considered validation examples are solved with a wave model of type (4.130) and with several Eulerian coupled FE/FE models of type (1.22). For both validation examples, the coupled FE/FE models result from a discretization of the plate into 4-noded quadrilateral shell elements (CQUAD4) and a discretization of the cavity into 8-noded hexahedral fluid elements (CHEXA). Tables 4.1 and 4.2 list, for both validation examples, the number of wave functions in the coupled vibro-acoustic wave models, as well as the number of elements and the corresponding number of unconstrained degrees of freedom6 (dof) in each FE/FE model. The tables indicate also the CPU times, needed for the direct response calculations at one frequency on a HP-C180 workstation (SPECfp95=18.7, SPECint95 =11.8). The indicated CPU times for the wave models include both the times for constructing the models as well as for solving the resulting matrix equations. Since the coupled FE/FE models consist of frequencyindependent submatrices, these submatrices must only be calculated once and the construction of the models at each frequency requires only a simple submatrix assembly. As a result, the computational effort for constructing the models is negligible, compared with the efforts for solving the (large) 6
each node in the plate discretizations has 3 degrees of freedom, i.e. the translational displacement component, normal to the plate, and the rotational displacement components around the two orthogonal in-plane co-ordinate axes; each node in the cavity discretizations has 1 pressure degree of freedom
Application for three-dimensional coupled vibro-acoustic problems
245
models, at least when the dynamic response is calculated in a large frequency range. Therefore, the indicated CPU times for the finite element models comprise only the direct solution times. Note also that the wave models are implemented in a MATLAB environment, while the finite element results are obtained with the MSC/NASTRAN software package.
plate cavity total dof CPU time
FE/FE 1 # elem. dof 54 120 1296 1729 1849 1s
FE/FE 2 # elem. dof 216 561 10368 12025 12586 35 s
FE/FE 3 # elem. dof 486 1326 34992 38665 39991 460 s
wave 56 258 314 80 s
Table 4.1 : properties of the various prediction models for validation example 1
plate cavity total dof CPU time
FE/FE 1 # elem. dof 128 315 1920 2421 2736 1.2 s
FE/FE 2 # elem. dof 240 627 6528 7579 8206 8.2 s
FE/FE 3 # elem. dof 960 2691 30780 33825 36516 130 s
wave 56 224 280 35 s
Table 4.2 : properties of the various prediction models for validation example 2
Figures 4.21 and 4.22 show some structural and acoustic frequency response functions (with a frequency resolution of 1 Hz), obtained with the wave model and the FE/FE models for the first validation example. These figures clearly illustrate that, by increasing the number of elements in the plate and cavity discretizations (see figures 4.21(a)→(c), 4.22(a)→(c)), the finite element results gradually converge towards the results, obtained with the small wave model. These figures illustrate also the typical approximation errors, involved with finite element discretizations. As already indicated in chapter 1 and illustrated in chapter 3, the low-order (polynomial) shape functions in each (parent) element can only represent a dynamic response with a limited spatial variation. As a result, the dynamic stiffness is usually overestimated, yielding an overestimation of the resonance frequencies. Since the structural and acoustic wavelengths decrease with increasing frequency, the spatial variation of the dynamic response increases also with frequency, so that, for a given discretization, the overestimation of the
246
Chapter 4
resonance frequencies gets worse for increasing frequency (see figures 4.21 and 4.22). Note also that this frequency overestimation is less pronounced for the resonances at 121 Hz and 179 Hz than for the other resonances. This is due to the fact that most of the energy at these two resonances is stored in the cavity, while at the other resonances most of the energy is stored in the plate. Since the acoustic wavelengths are substantially larger than the
Figure 4.21 : structural frequency response functions (normal plate displacement over input force) at the excitation point (x’F,y’F)=(2Lx’/3,Ly’/3) of the first validation example (solid : wave / dashed : FE/FE 1 (a), FE/FE 2 (b), FE/FE 3 (c))
Application for three-dimensional coupled vibro-acoustic problems
247
structural bending wavelengths, at least in the considered frequency range, the spatial variation of the dynamic response around cavity-controlled resonance frequencies is substantially smaller than the spatial variation around plate-controlled resonance frequencies. As a result, the discretization
Figure 4.22 : acoustic frequency response functions (cavity pressure over input force) at cavity location (x,y,z)=(2Lx/3,2Ly’/3,Lz/4) of the first validation example (solid : wave / dashed : FE/FE 1 (a), FE/FE 2 (b), FE/FE 3 (c))
248
Chapter 4
errors and associated frequency overestimations are smaller for cavitycontrolled than for plate-controlled resonances. Figures 4.23 and 4.24 show some structural and acoustic frequency response functions (with a frequency resolution of 1 Hz), obtained with the wave model and the FE/FE models for the second validation example. These
Figure 4.23 : structural frequency response functions (normal plate displacement over input force) at the excitation point (x1,F,y1,F)=(Lx1/4,Ly/4) of the second validation example (solid : wave / dashed : FE/FE 1 (a), FE/FE 2 (b), FE/FE 3 (c))
Application for three-dimensional coupled vibro-acoustic problems
249
figures confirm the observations from the results of the first validation example, in that the finite element results gradually converge towards the prediction results, obtained with the small wave model, and that the overestimation of the resonance frequencies gets worse for increasing frequency. Note that, in the considered frequency range, only one cavitycontrolled resonance (192 Hz) of this vibro-acoustic system has been identi-
Figure 4.24 : acoustic frequency response functions (cavity pressure over input force) at cavity location (x1,y1,z1)=(Lx1/4,Ly/4,2Lz1/5) of the second validation example (solid : wave / dashed : FE/FE 1 (a), FE/FE 2 (b), FE/FE 3 (c))
250
Chapter 4
fied. At this resonance, the frequency overestimation is indeed smaller compared with the other, plate-controlled resonances. A comparison of the accuracy and the associated computational efforts, involved with the wave models and the FE/FE models (see CPU times in tables 4.1 and 4.2) illustrates the beneficial convergence rate of the proposed wave based prediction technique. In comparison with the finite element method, the new prediction technique provides highly accurate predictions of the coupled vibro-acoustic response with a substantially smaller computational effort. This beneficial convergence rate is also illustrated in figure 4.25. This figure plots the relative prediction errors, as defined in section 2.7.2.1., against the CPU times, involved with some structural and acoustic results from the various prediction models for the first validation example (harmonic excitations at 60 Hz and 180 Hz). Note also that the beneficial convergence rate of the wave based prediction technique will most likely become even more apparent, when the technique is implemented in a more efficient software environment, instead of the currently used MATLAB environment.
Figure 4.25 : convergence curves for the normal plate displacement (left) at the excitation point (x’F,y’F)=(2Lx’/3,Ly’/3) and the cavity pressure (right) at cavity location (x,y,z)=(2Lx/3,2Ly’/3,Lz/4) of the first validation example (solid : wave , dashed : FE/FE) (+ : 60 Hz, ∇ : 180 Hz)
Application for three-dimensional coupled vibro-acoustic problems
251
These performance comparisons clearly illustrate the potentials of the proposed wave based prediction technique for meeting the current challenge in coupled vibro-acoustic modelling, as outlined in section 1.4.1. Since this new, deterministic prediction technique provides highly accurate prediction results in a more efficient way than the currently available (element based) prediction techniques, its practical frequency limitation for coupled vibroacoustic problems may be shifted towards substantially higher frequencies.
4.4.5. Modal analysis of a double-panel partition This section presents an experimental validation of the wave based prediction technique, applied for the identification of the low-frequency modal properties of a double-panel partition, which is a typical coupled vibro-acoustic system that is often encountered in noise control engineering. The author and some colleagues of the PMA Noise and Vibration research group have spent a vast amount of research effort on the investigation of the low-frequency dynamic behaviour of finite-sized double-panel partitions. Analytical and numerical prediction models, together with several experimental validations, have provided considerable insight in the effect of the vibro-acoustic coupling interaction between the panels and the enclosed cavity on the low-frequency modal properties and sound transmission characteristics of finite sized double-panel partitions. Based on the identified modal properties, several active control configurations have been designed and successfully implemented, yielding a significant improvement of the low-frequency sound transmission loss. Appendix F describes the main low-frequency modal properties of doublepanel partitions, identified from an analytical model, along with a wave model, obtained with the proposed wave based prediction technique. For a detailed discussion of the numerical and experimental investigations of the low-frequency dynamic behaviour and sound transmission characteristics of double-panel partitions, the reader is referred to DESMET et al. (1994) and DESMET and SAS (1994b, 1995, 1997). The active control implementations are discussed in SAS et al. (1993, 1995), DESMET and SAS (1994a) and DE FONSECA et al. (1996)). experimental set-up Figure 4.26 shows the considered double-panel partition. Two identical flat aluminium panels with dimensions Lx1xLy1=1.14 m x 0.73 m are clamped to a rigid framework with height Lz1=0.15 m. The thickness of both panels is
252
Chapter 4
t=1.5x10-3 m. The double-panel partition is mounted in the upper opening of a rigid walled enclosure with dimensions Lx2xLy2xLz2=1.215 m x 0.805 m x 1.065 m. A loudspeaker in this enclosure provides the acoustic excitation of the double-panel partition.
Figure 4.26 : double-panel partition (experimental set-up)
In order to enable the experimental identification of the modal properties of this double-panel partition, an array of 7x6 microphones with a spacing of 0.127 m x 0.12 m is positioned in the plane z1=3Lz1/4 in the cavity, enclosed by both panels. The central parts of each panel are instrumented with an array of 8x6 accelerometers with a spacing of 0.06 m x 0.06 m. These accelerometer arrays don’t cover the entire surface of the panels in order to allow a proper identification of the higher-order modes with the given number of accelerometers. However, due to the central location of the accelerometers, their mass loading becomes a local effect. To overcome this problem, dummy masses with the same weight as the accelerometers (0.0032 kg) are added to both panels with the same spacing, so that the mass
Application for three-dimensional coupled vibro-acoustic problems
253
loading is homogeneously spread over the entire panel surfaces. In total, a mass of 0.69 kg is added to each panel. coupled vibro-acoustic wave model A wave model of type (4.130) is constructed for the prediction of the coupled vibro-acoustic behaviour of the experimental set-up, shown in figure 4.26. The steady-state normal displacements of both panels are approximated as expansions of type (4.108), using 60 structural wave functions, which are associated with the rectangular panel domains Lx1xLy1. The steady-state pressure in the cavity between both panels is approximated as an expansion of type (4.106), using 216 acoustic wave functions, which are associated with the rectangular cavity domain Lx1xLy1xLz1. The steadystate pressure in the enclosure is approximated as an expansion of type (4.106), using 594 acoustic wave functions, which are associated with the rectangular enclosure domain Lx2xLy2xLz2. The loudspeaker in the enclosure is modelled as an acoustic point source at location (x2q,y2q,z2q)=(0.4m,0.365m,0.2m). An ambient density ρ0=1.225 kg/m3 and a speed of sound c=340 m/s are used as fluid properties for the air in the cavity and enclosure. Since the additional mass (0.69 kg) of the 9 2 accelerometers and dummy masses on each aluminium (E=70.10 N/m , v=0.3) panel doesn’t contribute to the panel bending stiffness, the mass loading effect is taken into account by increasing the aluminium density from ρs=2790 kg/m3 to ρs=3343 kg/m3 (=2790+0.69/(Lx1xLy1xt)). Figure 4.27 shows the prediction results for the instantaneous structural and fluid displacements at 100 Hz in the plane y2=0.6375 m. The accurate representations of the clamped panel boundary conditions, the continuity conditions of the normal structural and fluid displacements along the panelcavity and panel-enclosure interfaces as well as the rigid walled boundary conditions of the cavity and the enclosure, illustrate the high prediction accuracy, obtained with the proposed wave model. modal properties Due to the implicit frequency dependence of the acoustic and structural wave functions, the resulting coupled vibro-acoustic wave model is frequency dependent, so that the predictions of the undamped natural frequencies and mode shapes of the considered double-panel partition cannot be obtained from a standard eigenvalue problem. However, by calculating the forced response of the undamped double-panel partition, the resulting resonance frequencies and corresponding operational deflection
254
Chapter 4
shapes are very close to the exact modal parameters, provided that the resonances are well separated from each other.
Figure 4.27 : instantaneous structural and fluid displacement at 100 Hz in plane y2=0.6375 m for an acoustic point source excitation at location (x2,y2,z2)=(0.4m,0.365m,0.2m) (exploded view)
Two major classifications can be made regarding the modes of a doublepanel partition (see appendix F). In a first classification, a distinction is made between panel-controlled and cavity-controlled modes, depending on whether most of the modal energy is predominantly stored in the panels or in the enclosed cavity. A second classification is based on the symmetry of a double-panel partition, in that both panels have the same modal displacements patterns, which are either in-phase or out-of-phase, relative to each other. Table 4.3 adopts these two classifications in a comparison of the predicted and experimentally identified undamped natural frequencies of the
Application for three-dimensional coupled vibro-acoustic problems
255
considered double-panel partition. Note that the modal displacement patterns of both panels in the considered partition are not completely identical, since the symmetry of this partition is disturbed by the presence of the enclosure. However, the effect of the enclosure on the panel 7 displacements is fairly small , compared with the effect of the cavity, since the enclosure volume is substantially larger than the cavity volume. panel-controlled (u,v) (1,1) (2,1) (3,1) (1,2) (2,2) (4,1) (3,2) (1,3) (4,2) (5,1) (2,3) (3,3) (5,2) (6,1)
7
predicted in-phase (Hz) out-of-phase (Hz) 19.7 34.2 24.3 22.3 38.6 61.4 40.2 38.6 47.9 46.6 57.6 55.9 60.8 59.9 76.6 79.6 79.7 78.5 82.4 92.3 84.1 82.0 96.8 99.8 103.7 102.6 111.9 109.6
experimental in-phase (Hz) out-of-phase (Hz)
63.0
48.1 45.6 63.7 59.3 58.5 76.0 80.7
85.1 92.9 81.8 97.6 100.6 104.5 116.8 109.6
except for the panel displacements at frequencies, close to the resonance frequencies of the uncoupled enclosure
256
Chapter 4
(4,3) (1,4) (6,2) (2,4) (5,3) (3,4) (7,1) (4,4) (6,3) (7,2) (1,5) cavity-controlled (l,m,n) (1,0,0)
115.1 113.9 125.2 123.0 133.0 131.9 132.8 131.1 138.7 137.7 145.5 144.2 145.9 147.4 163.4 162.1 167.0 168.6 167.5 166.2 186.2 187.2 predicted out-of-phase (Hz) 169.1
116.6 113.0 123.5 120.8 134.4 132.8 129.0 140.7 135.9 146.5 142.5 144.5 151.6 164.2 161.0
168.2 181.4 184.0 experimental out-of-phase (Hz) 171.8
Table 4.3 : undamped natural frequencies of the double-panel partition ((u,v): number of half wavelengths of the modal panel displacement in the x1- and y1directions; (l,m,n) : number of half wavelengths of the modal cavity pressure field in the x1-, y1- and z1-directions)
Note that the blanks in table 4.3 indicate that those particular modes could not (clearly) be identified from the experimental frequency response functions. Figures 4.28 and 4.29 compare the predicted forced responses8 with the corresponding, experimentally identified, modal panel displacements and modal cavity pressure field of the (1,4) out-of-phase panel-controlled mode. 8
the forced responses on these figures are scaled, such that the maximum upper panel displacement corresponds with the experimentally identified maximum modal displacement of the upper panel
Application for three-dimensional coupled vibro-acoustic problems
257
Figure 4.28 : predicted forced responses of both panels (123.0 Hz) and experimentally identified modal panel displacements (120.8 Hz) for the (1,4) out-of-phase panel controlled-mode
Figure 4.29 : predicted forced response of the cavity (123.0 Hz) and experimentally identified modal cavity pressure field (120.8 Hz) for the (1,4) out-of-phase panel controlled-mode
This good agreement has also been observed for the other modes, listed in table 4.3. By taking into account, for instance, the inherent uncertainties on the material properties and the (slight) imperfections, involved with the practical realisation of the clamped panel boundary conditions, it may be concluded from the above comparisons between the experimental and numerical results that the proposed wave model provides a reliable prediction of the low-frequency modal properties of the considered doublepanel partition.
258
Chapter 4
4.5. Conclusions The first two parts of this chapter describe how the methodology of the wave based prediction technique, outlined in chapter 2, is applied for the prediction of the steady-state out-of-plane bending motion in thin, flat plates and the steady-state pressure field in three-dimensional uncoupled interior acoustic systems. Complete wave function sets, together with some particular solution functions, are proposed for the field variable expansions in both types of uncoupled dynamic problems. The contributions of the wave functions to these expansions result from symmetric prediction models, which are based on a weighted residual formulation of the boundary conditions. The third part of this chapter indicates how the proposed field variable expansions and corresponding wave models for uncoupled acoustic and uncoupled plate problems are modified for the prediction of the steady-state dynamic behaviour of three-dimensional coupled vibro-acoustic systems, in which part of the boundary surface of the acoustic domain consists of a thin, flat plate. In all three parts, the practical convergence of the proposed prediction models is illustrated for several numerical as well as experimental validation problems. In a similar way as performed in the previous chapter for twodimensional problems, the accuracy and the associated computational efforts of the proposed wave models and corresponding FE/FE models are compared for some three-dimensional coupled vibro-acoustic validation problems. Again, these comparisons reveal the beneficial convergence rate of the proposed wave based prediction technique, in that highly accurate predictions are obtained with a substantially smaller computational effort.
5. CONCLUSIONS AND FUTURE DEVELOPMENTS 5.1. Conclusions At present, the finite element and boundary element method are the most commonly used numerical prediction techniques for solving steady-state dynamic problems, defined in structural and acoustic continuum domains. An important implication of the element based modelling concept is that the involved large model sizes practically restrict the applicability of these deterministic prediction techniques to a limited frequency range. Above a certain frequency limit, these methods would require, even with the nowadays available high-performance computer resources, a prohibitively large amount of computational effort and memory resources to get an acceptable level of prediction accuracy. For the case of coupled vibro-acoustic problems, this practical frequency limitation is significantly smaller than for uncoupled structural or uncoupled acoustic problems. This is mainly due to the following reasons. • Coupled models are substantially larger, since a structural and an acoustic problem must be solved simultaneously. • The numerical solution procedure for coupled models is less efficient, since coupled models, at least for the most commonly used acoustic pressure/structural displacement formulation, are no longer symmetric. • The efficiency of model size reduction techniques such as the modal expansion and component mode synthesis technique is significantly smaller.
260
Chapter 5
As a result, there exists still a substantial discrepancy between the limited frequency range, in which element based models can provide accurate coupled vibro-acoustic predictions, and the significantly larger frequency range, in which accurate, deterministic predictions are needed for many industrial engineering problems. This dissertation presents a new deterministic prediction technique, whose very promising characteristics regarding computational efficiency for solving coupled vibro-acoustic problems may provide the requested breakthrough for narrowing the currently existing frequency discrepancy. The new wave based prediction technique follows a Trefftz approach and is based on three major modelling concepts: • field variable expansions The steady-state dynamic field variables in the entire - or at least in large subdomains of the - acoustic and structural continuum domains of a coupled vibro-acoustic system are approximated in terms of a set of acoustic and structural wave functions, which are exact solutions of the homogeneous parts of the governing dynamic equations, and some particular solution functions of the inhomogeneous equations. In this way, the governing dynamic equations are exactly satisfied a priori, irrespective of the contributions of the wave functions to the field variable expansions. • integral formulation of the boundary conditions Since the proposed field variable expansions are exact solutions of the governing dynamic equations, the contributions of the wave functions to the field variable expansions are merely determined by the acoustic and structural boundary conditions. Since only finite sized prediction models are amenable to numerical implementation, the boundary conditions can only be satisfied in an approximate way. Therefore, the wave function contributions result from an approximate integral - weighted residual or least-squares - formulation of the boundary conditions. • wave function selection to ensure convergence Since (most of) the governing dynamic equations are wave equations with an infinite number of homogeneous solutions, a selection from this infinite function set must be made for the construction of the field variable expansions. In this respect, a key issue in the proposed prediction technique is the definition of an appropriate wave function
Conclusions and future developments
261
selection, which ensures the convergence of the subsequent field variable expansions towards the exact solutions. These modelling concepts are successfully applied for various types of coupled vibro-acoustic problems. In its current stage of development, the proposed wave based prediction technique enables already the accurate prediction of the following steady-state dynamic field variable distributions in coupled vibro-acoustic systems: • pressure fields in two- and three-dimensional bounded acoustic domains with arbitrary geometries, • pressure fields in two- and three-dimensional1 unbounded acoustic domains, provided that these fields can be accurately approximated by confining the unbounded domain to a bounded domain through the introduction of an artificial boundary surface, on which an appropriate impedance boundary condition is specified, • normal displacement fields in one- and two-dimensional flat plates with arbitrary geometries, • displacement fields in one-dimensional curved structures, which may be regarded as assemblages of cylindrical shell sections, • dynamic field variable distributions in two-dimensional fluid-saturated, poroelastic domains with arbitrary geometries. It is illustrated through several validation examples that, for all these types of field variables, the proposed wave based prediction technique yields accurate numerical prediction results, which converge towards the exact solutions. In this way, the proposed wave based prediction technique provides an important contribution to the advance of the Trefftz approach. Although this approach exists for more than seventy years and offers several advantages over the element based modelling approach, it has still not been implemented into a valuable modelling alternative for the finite element and boundary element method. The main reason is that the transformation of a continuum problem into a Trefftz formulation yields an ill-conditioned problem. As a result, all attempts2 so far to practically implement a Trefftztype prediction model, although theoretically proven to be convergent, 1
2
although not reported in this dissertation, the modelling procedure for threedimensional unbounded acoustic domains applies in a completely similar way as for two-dimensional unbounded domains for acoustic and structural dynamic problems, only very few, unsuccessful attempts have been performed so far
262
Chapter 5
suffer from severe numerical convergence problems. An important breakthrough of the proposed wave based prediction technique is that, for the expansions of the various field variables that may be encountered in coupled vibro-acoustic problems, complete wave function sets have been found, which allow the introduction of the Trefftz approach into a coupled vibro-acoustic prediction model, whose poor condition is no longer preventing the numerical results from converging towards the exact solution. The new prediction technique has an important contribution to the advance of coupled vibro-acoustic modelling, due to its enhanced computational efficiency, compared with the existing prediction methods. In comparison with the finite element method, for instance, the wave based prediction technique has some beneficial (+) and some disadvantageous (-) properties regarding computational efficiency. (+) Coupled vibro-acoustic wave models are substantially smaller than corresponding finite element models. This is due to the fact that the proposed field variable expansions satisfy a priori the governing dynamic equations, so that approximation errors are only involved with the representation of the boundary conditions. (+) The expansions for derived secondary field variables, such as fluid velocity and structural stress, have the same spatial variation as the primary field variables, i.e. the acoustic pressure and structural displacement. This is advantageous for the convergence rate, especially in the case of coupled vibro-acoustic problems, for which the effect of the fluid on the structure is pressure-controlled, but for which the effect of the structure on the fluid is velocity-controlled. (-) Since the wave functions are complex functions, defined within the entire continuum domain or at least within large subdomains, the wave model matrices are fully populated and complex. (-) Due to the implicit frequency dependence of the wave functions, the wave model matrices cannot be decomposed into frequency independent submatrices, which implies that a wave model must be recalculated for each frequency of interest. (-) Due to the global and oscillatory nature of the wave functions and due to the poor condition of a wave model, the involved numerical integrations are computationally more demanding. It is identified that the effects of the beneficial properties on the computational efficiency clearly predominate the effects of the disadvantageous properties. The accuracy and associated computational
Conclusions and future developments
263
efforts, involved with a wave model and a corresponding finite element model, are compared for several coupled vibro-acoustic validation examples. These comparisons reveal the beneficial convergence rate of the proposed wave based prediction technique, in that it provides highly accurate prediction results with a substantially smaller computational effort than the finite element method. In this respect, it is also identified that the weighted residual formulations, which are proposed for the various types of boundary conditions and which yield some symmetric submatrices in a coupled vibro-acoustic wave model, result in a better convergence rate than corresponding least-squares formulations. From the discussion of the methodology and the application of the wave based prediction technique for two- and three-dimensional coupled vibroacoustic problems, it may be concluded that the proposed technique offers an adequate way to comply with the current challenge in coupled vibroacoustic modelling. Due to its beneficial convergence rate, the practical frequency limitation of the proposed technique is significantly larger than for the existing prediction techniques and results in a significant narrowing of the currently existing mid-frequency twilight zone.
5.2. Future developments In view of obtaining a versatile and generally applicable modelling technique for coupled vibro-acoustic analysis, the next steps in the development of the wave based prediction technique will focus on the following aspects. 1. extension of the applicability and mathematical refinement To enable the application of the wave based prediction technique for a general coupled vibro-acoustic problem, convergent field variable expansions will be defined for the following steady-state dynamic field variable distributions : • in-plane displacement fields in two-dimensional flat plates with arbitrary geometries, • displacement fields in two-dimensional curved structures, which may be regarded as assemblages of flat, cylindrical and spherical shell sections,
264
Chapter 5
• pressure fields in two- and three-dimensional unbounded acoustic domains without confining the domains, • dynamic field variable distributions in three-dimensional fluidsaturated, poroelastic domains with arbitrary geometries. For these new as well as for the already defined field variable expansions, a mathematically firm definition will be explored for the continuum domain geometry, in which the convergence of the field variable expansions is ensured. 2. automation of the modelling procedure For the technique to be easily accessible without full knowledge of the mathematical background, its implementation must exhibit a substantial level of automation. By analogy with the element based methods and with the Trefftz-element method (cfr. section 1.4.3.3.), the idea will be explored of using the proposed field variable expansions to define standard acoustic, structural and poroelastic ‘elements’. This should allow to automatically generate a wave model for each element, based on the specification of its geometrical and material properties, and to obtain a global wave model from an automated assembly of the element wave models, based on the boundary conditions and external excitation(s). In addition, it will be investigated whether these element wave models may be coupled with conventional finite element and boundary element models. Such a hybrid modelling procedure would allow to combine the computational efficiency of a wave model for modelling the geometrically simple parts of a coupled vibro-acoustic system with the flexibility of finite element and boundary element models for modelling the geometrically complex parts.
Appendix A. FINITE ELEMENT METHOD FOR UNCOUPLED ACOUSTIC PROBLEMS
A.1. Helmholtz equation Acoustic responses in a fluid are usually regarded as small perturbations to an ambient reference state. The total pressure field p, mass density field ρ and velocity vector field v at any time t and any position (x,y,z) in the fluid may then be expressed as p( x, y, z, t ) = p0 ( x, y, z, t ) + p’( x, y, z, t ) ρ ( x, y, z, t ) = ρ 0 ( x, y, z, t ) + ρ’( x, y, z, t )
� � v ( x , y, z , t ) = v
0
� ( x , y, z, t ) + v ’( x, y, z, t )
(A.1)
where the primed variables represent the acoustic perturbations to the ambient fields. In a homogeneous fluid which is initially at rest, the ambient fields are constant in time and position, p0 ( x , y, z, t ) ≡ p0
ρ 0 ( x, y, z, t ) ≡ ρ 0
�
�
v0 ( x , y, z, t ) ≡ 0 .
(A.2)
For the derivation of the dynamic equations that govern the acoustic perturbation fields, an infinitesimal fluid volume dx.dy.dz is considered.
266
Appendix A
The conservation of mass requires that the increase per unit time of the mass of the fluid volume equals the net mass entering the volume per unit time. With the latter shown in figure A.1,
Figure A.1 : mass flow for an infinitesimal fluid volume dx.dy.dz
this yields
∂ ( ρv x ) ∂ ( ρv y ) ∂ ( ρv z ) ∂ρ dx. dy. dz = −( + + )dx. dy. dz . ∂y ∂z ∂t ∂x
(A.3)
When an external acoustic source is applied in the fluid, an additional mass flow is induced in the fluid, which must be taken into account in the expression for the mass conservation. With q being the volume velocity per unit volume, induced by the external acoustic source, q( x, y, z, t ) = q 0 ( x, y, z, t ) + q’( x, y, z, t ) ,
(A.4)
and with the assumption that there is no ambient external flow ( q 0 ≡ 0 ), the mass conservation law becomes
�
�
∂ ( ρ 0 + ρ’) = ( ρ 0 + ρ’)q’−∇.[( ρ 0 + ρ’)v ’] . ∂t
(A.5)
Finite element method for uncoupled acoustic problems
267
The conservation of momentum requires a dynamic force balance in the three orthogonal directions x, y and z. Figure A.2 shows the dynamic forces acting on the infinitesimal fluid volume dx.dy.dz in the x-direction, when the fluid is assumed to be inviscid.
Figure A.2 : dynamic forces acting in the x-direction
The conservation of momentum in the x-direction becomes then
ρdx. dy. dz.
dv x ∂p = − dx. dy. dz , ∂x dt
(A.6)
where the total time derivative of the x-component of the fluid velocity vector equals
� �
dv x ∂v x ∂v x ∂v ∂v ∂ = + . v x + x . v y + x . v z = ( + v . ∇ )v x . dt ∂t ∂x ∂y ∂z ∂t
(A.7)
Together with similar expressions for the dynamic force balances in the yand z-direction, the conservation of momentum may be expressed as a vector equation ( ρ 0 + ρ’)(
� � �
�
∂ + v ’. ∇)v ’ = −∇( p0 + p’) . ∂t
(A.8)
It is usually assumed that acoustic responses in a fluid occur under adiabatic conditions. This implies the following pressure-density relation,
268
Appendix A
p = f ( ρ ) = C. ρ γ ,
(A.9)
where C is constant in time and position and γ=cp/cv is the specific heat ratio between the specific heat coefficients cp and cv at constant pressure and constant volume, respectively. For air, for example, this ratio γ equals 1.4. Since this relation applies also to the ambient state, the constant C may be expressed as p C = γ0 . ρ0
(A.10)
The relation (A.9) may also be expressed as a Taylor-series expansion, df p = ( f ρ= ρ ) + ( 0 dρ
ρ=ρ0
).( ρ − ρ 0 ) + (
1 d2 f 2 dρ 2
).( ρ − ρ 0 ) 2 +... (A.11) ρ=ρ0
By using equations (A.1), this yields p’ =
γp0 γ (γ − 1) . ρ’+ .( ρ’) 2 +... ρ0 2ρ 02
(A.12)
By retaining only the terms with one primed variable in the aforementioned expressions, the linearized expressions for the conservation of mass, the conservation of momentum and the pressure-density relation become
� �
∂ρ’ = ρ 0 . q’− ρ 0 . ∇. v ’ , ∂t ∂v ’ ρ0. = −∇p’ , ∂t γp . p’ = 0 . ρ’ ρ0
�
�
(A.13) (A.14) (A.15)
Time derivation of (A.13) and substitution of (A.14) and (A.15), yields the linear acoustic wave equation
Finite element method for uncoupled acoustic problems
1 ∂ 2 p’ ∂q’ ∇ 2 p’− 2 = −ρ 0 , 2 ∂t c ∂t
269
(A.16)
where c denotes the phase speed of an acoustic wave in a fluid, c=
γp0 . ρ0
(A.17)
By confining the acoustic field variables to their steady-state values for a time-harmonic excitation (e.g. p’(x, y, z,t) = p’(x, y, z).e jωt ), the wave equation (A.16) transforms into the linear Helmholtz equation ∇ 2 p’+ k 2 p’ = − jρ 0ωq’ ,
(A.18)
where k(=ω/c) is the acoustic wavenumber. The transformation of the momentum equation (A.14) yields the relation between the steady-state fluid velocity vector field and the steady-state pressure field,
�
v’=
�
j ∇p’ . ρ 0ω
(A.19)
Note that the primes on the acoustic variables in (A.18) and (A.19) are usually omitted, when there is little possibility of confusing the total field variables with their acoustic perturbations.
A.2. Weighted residual formulation The weighted residual concept provides an equivalent integral formulation of the linear Helmholtz equation (A.18). The concept defines a steady-state acoustic pressure field in a bounded fluid volume V as a pressure field, for which the integral equation ~
∫ p (∇ V
2
p + k 2 p + jρ 0ωq ). dV = 0
(A.20)
270
Appendix A
is satisfied for any weighting function ~ p , that is bounded and uniquely defined within volume V and on its boundary surface Ω. The weighted residual formulation (A.20) may be reformulated as
∂ ~ ∂p
∂ ~ ∂p
∂~p ∂p
∂ ~ ∂p
∂~p ∂p
∂~ p ∂p
∫ [ ∂x ( p ∂x ) + ∂y ( p ∂y ) + ∂z ( p ∂z )]. dV − ∫ ( ∂x ∂x + ∂y ∂y + ∂z ∂z ). dV V V +∫ k2~ pp. dV + ∫ jρ 0ω~ pq. dV = 0 . V
(A.21)
V
According to the divergence theorem, the integral of the normal component of a vector field φ , taken over a closed surface Ω, is equal to the integral of the divergence of the vector field, taken over the volume V, enclosed by the surface Ω,
∫ (∇.φ ). dV = ∫ (φ. n ). dΩ , Ω
V
�
(A.22)
where n is the unit normal vector with positive orientation away from the volume V. Application of this theorem to the first integral term in (A.21) yields the ‘weak form’ of the weighted residual formulation of the linear Helmholtz equation,
~
1 ~ pp ). dV = 2 c V . (A.23) ~ ~ ( j ρ ω pq ). dV − ( j ρ ω pv . n ). d Ω ∫ 0 ∫ 0
∫ (∇p. ∇p). dV − ω ∫ ( V
2
V
Ω
A.3. FE implementation acoustic boundary conditions Since the second-order Helmholtz equation (A.18) describes one wavetype, the pressure field in a bounded fluid volume V is uniquely defined, if one boundary condition is specified at each point on the boundary surface Ω of domain V. For uncoupled acoustic problems, three types of boundary conditions may occur ( Ω = Ω p ∪ Ωv ∪ Ω Z ):
Finite element method for uncoupled acoustic problems
on Ω p ,
p= p
� �
� � v. n = v
v. n =
271
(A.24)
on Ω v ,
n
(A.25)
p = Ap, on Ω Z , Z
(A.26)
where p , vn and Z (or A ) are prescribed pressure, normal velocity and normal impedance (or normal admittance) functions, respectively. construction of an uncoupled acoustic finite element model In the finite element method, the fluid domain V is discretized into a number of small subdomains Ve (‘finite elements’) and a number of nodes, say ne, are defined at some particular locations in each element. Within each element, the distribution of the field variable, i.e. the pressure p, is approximated as an expansion p in terms of a number, say np, of prescribed
�
shape functions N ie , which are only defined within the considered element domain Ve, n � p( x, y, z ) ≈ p( x , y, z ) =
p
∑ Nie ( x, y, z ). ai
i =1
( x, y, z ) ∈ Ve .
(A.27)
The contributions ai in these expansions may be determined from the weighted residual formulation (A.23)1. For the commonly used linear tetrahedral and linear hexahedral fluid elements, the nodes are defined at each corner point of their element volumes and the number of element shape functions is equal to the number of nodes (np=ne). Each shape function N ie is defined, such that it has a value of unity at node i of the element and that it is zero at all other element nodes. In this way, each contribution ai in the pressure expansion (A.27) represents the pressure approximation pi at node i of the element,
�
�
p( x, y, z ) =
1
ne
�
∑ Nie ( x, y, z ). pi
i=1
( x, y, z ) ∈ Ve .
(A.28)
an uncoupled acoustic problem may also be cast into a variational formulation; for a detailed discussion of this formulation, the reader is referred to e.g. MORAND and OHAYON (1995)
272
Appendix A
Based on the element shape functions N ie , which are locally defined in one element Ve, some global shape functions Ni may be constructed, which are defined in the entire domain V. In each element domain Ve to which node i belongs, the global shape function Ni is identical to the corresponding element shape function N ie , while it is zero in all other element domains. In this way, a global pressure expansion may be defined as
�
p( x, y, z ) =
�
nf
�
∑ Ni ( x, y, z ). pi = [ N ].{ pi }
i=1
( x , y, z ) ∈ V ,
(A.29)
where nf is the total number of nodes in the discretization, [ N ] is a (1xnf)
�
vector of global shape functions and { pi } is a (nfx1) vector of unknown nodal pressure values. The corresponding pressure gradient approximation becomes then
�
∂p ∂x ∂p ∇p ≈ ∇p = = [∂ ].[ N ]. { pi } = [ B]. { pi } ∂y ∂p ∂z
��� �
�
�
�
�
,
(A.30)
where [∂ ] is a (3x1) vector of gradient operators and [ B] is a (3xnf) matrix of gradient components of the global shape functions. In a Galerkin weighted residual approach, the weighting function is expanded in terms of the same set of shape functions as used for the pressure expansion, ~ p ( x , y, z ) =
nf
∑ Ni ( x, y, z ). ~pi = [ N ].{ ~pi }
�
i=1
∇~ p = [∂ ].[ N ]. { ~ pi } = [ B]. { ~ pi } .
( x, y, z ) ∈V ,
(A.31) (A.32)
Finite element method for uncoupled acoustic problems
273
The concepts of element discretization and shape function definition are illustrated in figure A.3 for a two-dimensional fluid volume, which is discretized into linear rectangular fluid elements.
Figure A.3 : (a) FE discretization of a two-dimensional volume, (b) element shape functions, (c) global shape function
�
The determination of the nodal pressure values pi in the expansions (A.29) and (A.30) is based on the substitution of the expansions (A.29)-(A.32) into the weak form (A.23) of the weighted residual formulation of the Helmholtz equation. For the first term in the left hand side of (A.23), this substitution yields
$ $
(
!
) (
)
~ ~ T ∫ (∇p. ∇p). dV = ∫ [ B]. { pi } . [ B]. { pi } . dV
V
V
"
#
T T pi } . ∫ [ B] T .[ B] . dV . { pi } = { ~ pi } .[ K ]. { pi }, = {~ V
(
)
(A.33)
274
Appendix A
where [. ] T denotes the transpose of a matrix and [ K ] is a (nfxnf) acoustic ‘stiffness’ matrix. The matrix element Kij on row i and column j of this matrix is K ij = ∫ ( V
∂Ni ∂N j ∂Ni ∂N j ∂Ni ∂N j + + ). dV . ∂y ∂y ∂z ∂z ∂x ∂x
(A.34)
Recall that the global shape functions Ni and N j (and their spatial derivatives) have only non-zero values in the domains of those elements, to which, respectively, node i and node j belong. As a result, the volume integration in (A.34) may be confined to the integration over the domains of those elements, to which both node i and node j belong. Since the latter integration may be regarded as a sum of integrations over each of the common element domains and since the global shape functions in each of these element domains are identical to the corresponding element shape functions, matrix element Kij may be expressed as K ij =
e e e ∂Nie ∂N j ∂Nie ∂N j ∂Nie ∂N j ( + + ). dV ∑ ∫ ∂x ∂x y y z z ∂ ∂ ∂ ∂ e = 1 Ve m ij
(A.35)
where mij is the number of elements, to which both node i and node j belong. Since each node belongs to common elements with only a few, adjacent nodes, only a few matrix elements Kij are non-zero. This results in a sparsely populated stiffness matrix [ K ] . Due to this advantageous matrix property, the practical calculation of the stiffness matrix can be performed in a very efficient way. By confining the volume integration in (A.33) to one element domain, one may write
)*) %
{& }
T e T e e . pe ~ ~ ( ∇ p . ∇ p ). dV = p . ∂ . N . ∂ . N . dV [ ] [ ] ∫ i ∫ i Ve Ve
{ }
( [ ]) ( [ ])
{' } { } [ ] {( }
T T T = ~ pie . ∫ B e . B e . dV . pie = ~ pie . K e . pie , Ve (A.36)
{ }
[ ] [ ]
Finite element method for uncoupled acoustic problems
275
[ ]
where N e is a (1xnp) vector of element shape functions and
+
{ pie }
is a
(npx1) vector of unknown nodal pressure values of the considered element.
[ ]
The matrix elements in the associated (npxnp) element stiffness matrix K e are =
K ije
∫ Ve
e e e ∂Nie ∂N j ∂Nie ∂N j ∂Nie ∂N j ( + + ). dV . ∂x ∂x ∂y ∂y ∂z ∂z
(A.37)
Note that, since all element shape functions have non-zero values in their element domain Ve, each element stiffness matrix is now fully populated. The calculation of the global stiffness matrix [ K ] may now be performed in a two-step procedure. In the first step, all element stiffness matrices are calculated. In the second step, each non-zero element Kij of the global stiffness matrix is obtained, according to (A.35), from a simple addition of the corresponding entries (A.37) in the appropriate element stiffness matrices. With an appropriate numbering of the nodes in the FE discretization, the non-zero entries in the stiffness matrix appear in a narrow band around the matrix diagonal, yielding a sparsely populated, banded stiffness matrix. In a completely similar way, the second term in the left hand side of (A.23) may be expressed as
,
-
1 T 1 p. p). dV = −ω 2 { ~ pi } . ∫ 2 [ N ] T .[ N ] . dV . { pi } −ω 2 ∫ ( 2 ~ V c V c
. T = −ω 2 { ~ p } .[ M ]. { p } i
i
(A.38)
,
where [ M ] is a (nfxnf) acoustic ‘mass’ matrix. As for the global stiffness matrix, the practical calculation of this sparsely populated, banded global mass matrix is based on an assemblage of the element mass matrices, according to m ij 1 1 Mij = ∫ ( 2 N i N j ). dV = ∑ ∫ ( 2 N ie N ej ). dV . e = 1 Ve c V c
(A.39)
276
Appendix A
The first term in the right hand side of (A.23) may be expressed as T ~ T . jρ ω [ N ] T q . dV = ~ 0 ∫ { pi } . {Qi } , V
(
∫ ( jρ 0ωpq ). dV = { pi } ~
V
)
(A.40)
where {Qi } is a (nfx1) acoustic source vector. When the distribution q of external acoustic sources is confined, for instance, to an acoustic point source of strength qi , located at node i, the source distribution q is q( x, y, z ) = qi .δ ( xi , yi , zi ) ,
(A.41)
where δ is a Dirac delta function at node i. The subsequent source vector becomes then
V
{Qi } = jρ 0ω ∫ (qi .[ N ] T .δ ). dV .
(A.42)
Provided that node i is not located on the boundary surface of V, all components of the (nfx1) source vector are zero, except the component on row i, which equals jρ0ωqi . The second term in the right hand side of (A.23) allows the introduction of the boundary conditions into the FE formulation. Since the integration over the boundary surface Ω may be regarded as a sum of the integrations over the subsurfaces Ωv , Ω Z and Ω p and since the normal velocity and normal impedance boundary conditions (A.25) and (A.26) must be satisfied on, respectively, Ωv and Ω Z , the second term in the right hand side of (A.23) may be expressed as − ∫ ( jρ 0ω~ pvn ). dΩ − Ωv
~
/
~
0 0
∫ ( jρ 0ωpAp). dΩ − ∫ ( jρ 0ωpv . n ). dΩ
ΩZ
. (A.43)
Ωp
The substitution of expansion (A.31) into the first term of (A.43) yields
Finite element method for uncoupled acoustic problems
277
− ∫ ( jρ 0ω~ pvn ). dΩ = Ωv
(A.44) T T T ~ ~ { pi } . ∫ ( − jρ 0ω [ N ] vn ). dΩ = { pi } . {Vni } Ωv The component on row i of the (nfx1) input velocity vector {Vni } is thus Vni =
∫ (− jρ 0ωNi vn ). dΩ
.
(A.45)
Ωv
The boundary surface of an element is the union of all its faces. The boundary surface of a linear tetrahedral or a linear hexahedral fluid element, for instance, is the union of, respectively, four and six faces. For these compatible elements, the value of a global shape function Ni at a certain element face is only non-zero, if node i is located on the considered element face. As a consequence, the value of a global shape function Ni at the boundary surface Ωv and the subsequent vector component Vni are only non-zero for those nodes that are located on the boundary surface Ωv . Hence, the practical calculation of the input velocity vector is based on its component expression
Vni = − jρ 0ω
( N e . v ). dΩ , ∑ ∑ ∫ i n e = 1 f = 1 Ω f e m vi f vie
(A.46)
where mvi is the number of elements, for which node i is located on their fvie element faces Ωef , that are part of the boundary surface Ωv . The prescribed normal velocity at a certain location in an element face is often specified by a shape function expansion, comparable to the pressure expansion (A.31),
[ ]{ }
f vn ( x, y, z ) = {n} T . N ve . vef
( x, y, z ) ∈ Ω ef ,
(A.47)
278
Appendix A
where the (3x1) vector {n} consists of the x-, y- and z-components of the unit vector, normal to the considered element face. The matrix N 1e f N ve = 0 0
0
[ ]
1
0
N 1e
0
0
N 1e
1 1
N nev
0
0
N nev
0
0
0 0 N nev
(A.48)
is a (3x3nv) matrix, which contains the pressure shape functions of the nv nodes, located on the considered element face. In each of these nodes, the x-, y- and z-component of the fluid velocity is specified, yielding the (3nvx1) vector
{vef } = {vx 1 T
v y1
vz 1
2
v xnv
}
v zn v .
v yn v
(A.49)
The second term in (A.43) may be expressed as −
3
~
4
~ T . ρ A [ N ] T .[ N ] . dΩ . p { } 0 ∫ i (A.50) Ω Z
∫ ( jρ 0ωpAp). dΩ = − jω { pi }
ΩZ
(
)
5
T = − jω { ~ pi } .[ C ]. { pi }
where [ C ] is a (nfxnf) acoustic damping matrix. The matrix element Cij on row i and column j of this matrix is Cij =
∫ ( ρ 0 ANi N j )dΩ
.
(A.51)
ΩZ
As it is the case for the stiffness and mass matrix, the damping matrix is sparsely populated, since matrix element Cij is only non-zero, if node i and node j are located on at least one common element face that is part of the boundary surface Ω Z . The practical calculation of the non-zero matrix elements is therefore based on the expression
Cij =
m Zij
( ρ A . N e . N e ). dΩ , ∑ ∫ 0 i j f = 1 Ω f e
(A.52)
Finite element method for uncoupled acoustic problems
279
where mZij is the number of element faces Ωef , on which both node i and node j are located and that are part of the boundary surface Ω Z . The specification of the prescribed normal admittance is usually restricted to a constant value per element face in Ω Z . The substitution of expansion (A.31) into the third term of (A.43) yields
6 6
6 6
T T − ∫ ( jρ 0ω~ pv . n ). dΩ = { ~ pi } . ∫ ( − jρ 0ω [ N ] T v . n ). dΩ = { ~ pi } . {Pi } Ωp Ωv (A.53)
Due to the particular shapes of the global shape functions Ni , the component on row i of the (nfx1) vector {Pi } , Pi =
7 7
∫ ( − jρ 0ωNi v . n ). dΩ
,
(A.54)
Ωp
is only non-zero, if node i is located on the boundary surface Ω p . Since the latter expression doesn’t allow the introduction of the prescribed pressure boundary condition (A.24), this boundary condition enters the finite element model in a different way, as will be discussed later. By substituting expressions (A.33), (A.36), (A.40), (A.44), (A.50) and (A.53) into (A.23), the weak form of the weighted residual formulation of the Helmholtz equation, including the boundary conditions (A.25) and (A.26), becomes
8
{ ~pi }T . ([ K ] + jω [ C] − ω 2 [ M ]).{ pi } = { ~pi }T . ({Qi } + {Vni } + {Pi })
. (A.55)
Since the weighted residual formulation should hold for any expansion of pi } the weighting function, i.e. for any set of shape function contributions { ~ (see (A.31)), a set of nf equations in the nf unknown nodal pressure approximations pi is obtained,
9
([ K ] + jω[ C] − ω 2[ M ]).{ p: i } = {Qi } + {Vni } + {Pi } .
(A.56)
280
Appendix A
Row i in this matrix equation expresses the weighted residual formulation, in which the global shape function Ni , associated with node i, is used as weighting function ~ p. The prescribed pressure boundary condition (A.24) is not yet included in matrix equation (A.56). This is usually done by directly assigning the prescribed pressure value at each node location on the boundary surface Ω p
;
. 2 ω ma
(A.75)
When the finite element model (A.57) has a proportional damping matrix, i.e. a damping matrix, which may be written as a linear combination of the stiffness and mass matrix,
288
Appendix A
[Ca ] = α [ K a ] + β[ Ma ] ,
(A.76)
the modal damping matrix is also a diagonal matrix, 2ζ 1ω 1 ~ Ca =
[ ]
?
, 2ζ m a ω m a
(A.77)
with the modal damping ratio’s
ζm =
αω m β . + 2 2ω m
(A.78)
Although all modes should be used (ma=na) in the modal expansion (A.68) to get the same prediction accuracy with the modal model (A.69) as with the direct finite element model (A.57), a modal model with a relatively small truncated set of modes yields already a level of accuracy, close to the one of the much larger direct model. In this framework, a rule of thumb states that an accurate prediction of the steady-state dynamic behaviour at a certain frequency ω is obtained by using all the modes, whose natural frequencies ωm are smaller than 2ω. In this way, a significant model size reduction is obtained (ma