smart decision but driver is not. 'actively' made aware. Visible. Intelligence. • Car
system are smart and users. 'sees actively' how the car affects him. • Park Assist ...
TM
September 2013
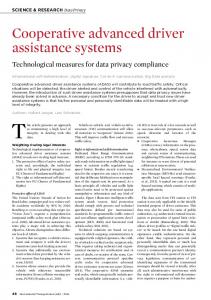
4th Generation 3rd Generation 2000- 2020
2nd
Visible Intelligence
Generation 1970 - 2000
• Car system are smart and users ‘sees actively’ how the car affects him • Park Assist, ACC, LDW, Ped Detection
Hidden Intelligence
1st Generation 1900 - 1970 Mechanical System Drive-train, mechanical brake and steering
TM
• ABS, EAFS, Fuel injection • Cars make smart decision but driver is not ‘actively’ made aware
3
2020 - 2040 Partial to virtually full Autonomous • User does not drive most of the time • New car-driver interaction model
TM
Sensor Units / CAGR % Vision Sensor (Blue): 82M u/ 22% Radar-Lidar (Red): 59Mu/ 30% Ultra Sonic(Green): 23Mu/ -4% Total: 164Mu/ 16%
•Strong Growth of Sensor •360° Sensing & NCAP •Two major Technology !! •77GHz and MegaPixel
•U-sonic in decrease •No long term LIDAR •Night Vision smaller Camera Sensors •Smallest Size – High system flexibility •Largest FOV + increasing Pixel • density •Power reduction – ISP & ICP •Largest Volume and take rate
Radar Sensors
•Larger Size ⇒ integration of component •Longest range (200 meter+) •Power Reduction – Scalability •Distributed Computational load •Most complete Sensor and good Take rate
IMS Research - Feb 13` TM
5
Ultrasonic Sensors •Small Size – Negative growth - mature •Close range accuracy (few cm) •Large number used per vehicle •Only for park assist and in negative growth
Adult Occupant
Fit Rate
100%
Child Protection
0%
Pedestrian Protection
50%
Safety Assist Blind spot monitoring Lane support systems Speed Alert Systems Emergency Braking Attention assist Etc.
50%
Ex: In 2012 36 Models rated: 66% got 5 Stars incl. all of the Small Family cars Every OEM largely focused to hit 5 stars. AEB is already ‘commoditizing’ and ACC is often added as value added TM
6
TM
• • • •
Camera and Radar @>15kmh Cognition Algorithms to extract features / classify objects No display necessary F. Safety applied to longitudinal motion (braking / Steering)
e.g. • Lane Keep Assist • Adaptive cruise control • Emergency braking • Pedestrian protection
• • • • •
Rear/Side Camera, sat. Radar, Usonic @15kmh 3D Enviornmental Modeling allowing self navigation No Display Hard safety – Longditudinal and Lateral motion Integration of Feature extraction
e.g. • Self-driving Auto • Sensor Fusion
8
Scalable Performance
Non classic approach – Innovation
“Multiple” fusing Sensors ⇒ Dense volatile Memories Large BW for Data exchange Complex Parallel Processing
Every MIPS is needed ⇒ ISO26262 process followed Safe volatile memories Security: which standard ?
Application Tools and libraries
Miniaturization
Software Development Accelerated ⇒ SDK Tools for Image Cognition Scalability of SW
Smaller Size ⇒ Package for Power dissipation Small PCB allowed Integration of “other” dies . TM
9
Front View Camera System (LDW, TSR, PP, Obj det)
Smart Camera Rear – Remote Park Assist Park Assist/Self-Parking
Night Vision/ Surround View Camera
Decision Fusion Center Evasion Assistance
Interior Camera Driver Monitoring
High Beam Control
•
Side Camera Blind spot /Surround View
Key Trends: 1. Flexible solutions to adapt to OEMs fast evolving programs 2. Major focus on Power/Performance ratio and Size reduction 3. Strong SW Enablement to support investment return TM
10
Park Assist
Side Impact Assist Radar Fusion Center
Blind Spot Detection
Emergency Brake System & ACC
Cross Traffic Assist
Key Trends: 1. Large increase of sensors to support 360° sensing 2. Strong Cost Reduction 3. Miniaturization TM
11
TM
Qorivva 57A7 Highly Integrated RADAR μC Analog and Digital Excellence Performance– offers top-performance for intense computational tasks with key integrated digital accelerators
Safe –Built on proven safe technology it
delivers a scalable, well documented,
process compliant safe architecture and safe Software
TM
Integration & Cost – Right balance of
memory, large number of Analogue IP designed for Radar, FFT accelerator. Drive Miniaturization and BOM saving Flexible – can be used in all
applications and with all Front End Radar sensor technology and types.
13
Qorivva MPC577xK •
•
Replaces: −
8 ADC
−
1 DAC
−
1 FPGA
−
External SRAM
−
General purpose MCU
Enables:
Previous Generation − Significant PCB area saving Next − Reduced assembly cost Generation
MR2001 77 GHz Chipset •
•
Replaces: −
Bare Die RF solutions with a RF Chipset based on RCP package technology
−
Discrete Filter Components and Amplifiers
Enables: −
Significantly lower assembly cost
−
Lower PCB cost TM
14
ADC Input
Radar Processing Platform
8 x ΣΔ – 10MHz
Signal processing toolbox
4x 12bit SAR -1MHz
FFT
COPY
Z7 dual is. @266MHz 16kB I-cache 2 way
16kB D-cache 2 way
VFPU & SPE2-SIMD
Z7 dual is. @266MHz
DAC
Scheduler
DMA
2Ms/s 8 bit DAC
16kB I-cache 2 way
16kB D-cache 2 way
Vehicle and ECU Network
CPU Platform
Z4LS @ 133MHz 16kB I-cache 2 way
16kB D-cache 2 way
Z4 LS @ 133MHz
8kB I-cache 2 way
Master Comm Bus 128 msg FlexRay 100base T Ethernet
SFPU
4kB D-cache 2 way
SFPU
Intra ECU connectivity LFAST
VFPU & SPE2-SIMD
Volatile Emb. Memory 1.5MB RAM with ECC
NV Memory 4MB with ECC
Ext. Memory I/F
Fabric 64 bit XBAR with E2E ECC
PMU OSC and PLL
Connectivity
16 bit PDI
2 x Cross Trig Unit
3 x IIC
2 x SENT I/F
Safe Memory
2 x FlexPWM (12 ch)
4 x LinFlex Ctrl
4 x dSPI
MEMU
3 x eTimers – 6 ch. each
4 x Flex CAN (1FD)
SWT & STM
T-Sensor FCCU & CRC Safe DMA DEBUG Nexus 3+
Key Features: F. Safety: developed as per ISO26262 with target ASIL-D Safety Enablement: Safety Manual and FMEDA SPT: Radix4/2, r2c, c2c, 50 MHz 16 bit twiddle, 24 bit results, Copy, Transpose SRAM: Multi ported SRAM Ctrl and 1.5MB SRAM with ECC Top of Class Analogue IP: PLL, DAC, OSC and ΣΔ ADC SW Enablement: QMS MCAL and/or Safe Mcal Asil B (D)
Specifications: CPU: 3x PPC: 2x Z7 266 MHz Power dual issue with SPE2 and VFPU and Z4 133MHz in permanent lockstep SPT: FFT Accelerator, DMA Analog: Octal SD + 4 SAR, Ultra low jitter PLL, precision DAC Package: 356 PBGA – 0.8 mm pitch – 17 x 17 mm2 body Temp Range (Ta): -40 to 125°C, 150 °C Tj, AEC-Q100 Grade 1 Main Supply: 3.3V IO (5V SAR) and 1.2V Core (ext or PMU)
TM
Safety & Support
15
TM
P e r f o r m a n c e
Front LRR + Fusion Front MRR
Front LRR/MRR
Satellite Radar(s) Qorivva 57A7
Single Chip Radar
Value TM
17
TM
Low – Mid Range Mono Front Camera Smart Rear Camera / SVC 9Distance Measurement 9Object Detection 9Pedestrian Detection 9Graphic Overlay TM
9Lane Departure Warning 9Blind Spot Detection 9Smart Headlamp Control 9Cross Traffic Alert 9Forward Collision Warning 9Low Cost Adaptive Cruise Control 9Pedestrian Detection (60kph) 9Traffic Sign Recognition (Full)
i.Mx 58A8
i.Mx 58A5
i.Mx 58A2
High End Front Vision & Fusion solution Mid Range Mono Front Camera Smart Rear Camera / SVC 9Smallest Size achievable 9Low cost Pedestrian Detection coverage - NCAP 9Graphic Overlay
TM
9Cost Optimum for 4-function bundle 9Can do Stitching and offload infotainment unit 9Power & Size optimized 9Tools and Libraries 9ASIL B(D)
20
9Stereo Camera & multi bundle apps 9Multiple stream Stitching capability 9Best in Class Performance/Power 9Highly abstracted Image cognition processing 9Smallest form fit at same power: RCP 9Tools-Kernels-app examples 9Std connection DSP, FPGA for flexible perf. Extension 9Easy ASIL-D with Very high performance Fusion box
Image PreProcessing • ISP • Multi-streams Connectivity
Features Extraction • • • •
Features Classification & Prediction
Corners, • SVM • Adaboost Edges, Intensity gradients • K-nearest Neighbor shapes
Gfx & Display
Image Cognition Proc.
L-mem
L-mem
Sequencer
32 CU
32 CU DMA
Sequencer
APEX2 CL
L-mem 32 CU DMA
CPU CPU I-cache
TM
CPU CPU
D-cache
I-cache
I-cache
D-cache
SIMD
GPU
D-cache
I-cache
Display Controller
D-cache
SIMD
SIMD
SIMD
Video Codec Encoder
APEX2 CL
High BW Operations Scalable MIMD Local Memory Soft ISP
Vision Platform
CPU Platform
Image Cognition Proc.
32 CU
Gfx Overlay & Video Distribution
• Tracking, Motion • Object • Safe Fusion Estimation Recognition/Ped • Graphic Overlay estrian & Display • Optical Flow & Disparity • Augmented • 2D vs. 3D Reality Projection • Stitching • Face Detection
Image Proc. Platform
L-mem
Object Recognition & Fusion
Multi Image Processing
L2 Cache
Scalable RISC – Data Fusion SIMD Co-Processor - Neon Memory Hierarchy and coherency 21
Decoder
Vector Graphic Video Codec Smart Display
TM
Specialized accelerators to provide maximum image processing performance with minimum power APEX-642 Core
• • • • • TM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
Multi Channel DMAs
CMEM
CMEM
Array Control Processor
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CMEM
CU
CMEM
CMEM
CMEM
CMEM
CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU
CMEM
CMEM
CMEM
CMEM
CU
CMEM
CMEM
CMEM
APU 1 (32x CU)
CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU CU
CMEM
CMEM
APU 0 (32x CU) CMEM
•
Array Control Processor
Sequencer
Stream DMAs
Massively Parallel SIMD for vector processing (CU’s + 4KB CMEM per CU Array Control Processor (ACP) for scalar processing, access to external and internal memory MC-DMA for efficient instruction and data movement Stream DMA for pixel data in/out of CMEM Sequencer off-loads ACP for data and instruction and sequencing 23
23
•
Ext. Memory
APEX‐642 ICP
• MC‐DMA + Stream DMA
Sequencer
•
32 x
CU
CU
CU
32 x
CU
CU
CU
ACP
CU
•
CU
ACP
APU‐0
APU‐1
TM
24
MC-DMA and Stream DMA move slices into CMEM – no cache misses APU SIMD with CU’s do vector processing ACP can do scalar processing on intermediate results – no requirement to move to external memory Slices to be processed next, and intermediate results, are pipelined
Canny Edge, widely used, robust algorithm for edge detection (Sobel Operation). Named after John Canny.
Canny Edge Detection Comparison 70.0
MHz/fps 60.0
50.0
40.0
Canny Edge Algo
30.0
20.0
10.0
0.0 APEX-642
Cortex A8 Adreno 200 Adreno 205 PowerVR 1GHz SGX535
TM
PowerVR SGX540
25
BCM 2727
•
Automated Pipelining
•
Fast Development
•
Easy Optimization
•
Plug & Play Algorithms
•
Adapted to OpenCL
High Level Algorithm Processing Graph A
B
C
D
ACF DataPath
Memory Mgt
Pipelining
APEX Data & Memory Management TM
26
26
TM
SCP2201 Image Cognition Processors Smart Camera Technology Balances Performance and Power –
Delivers the Right Integration –
APEX™ IP offers industry-leading performance per mwatt and delivers an ideal solution for image cognition processing
Image cognition processor delivers the innovative technology required for smart automotive camera applications
Mainstream Cost-effective Solution –
Speeds Time to Market –
Cost, power and size advantages enables smart camera technology into mainstream vehicles, improving auto safety features
Comprehensive solution including libraries, hardware and software development kits speeds time to market.
TM
28
• • •
•
• •
•
ARM926EJ @ 350 MHz 1V Core, 1.8~3.3V IO APEX supports: − 34 billion operations per second (BOPs), or 2 billion MACs per second plus a 2nd slave scalar RISC (350 MHz) Built-in dedicated overlay engine, rotation, supports alpha-blending and overlay Drives TFT LCDs directly BT656 sensor interface (YUV, 8- and 10-bit with separate H/V Sync) Built in TV encoder/Video DAC (NTSC/PAL)
TM
29
TM
•
Video compression reduces cost − Low latency MJPEG compressed 1.2 Mpixel, 30 fps video stream fits 100 Mbps Ethernet link − Predictive compression control allows high quality factor − Negligible degradation of object detection rate at high quality factor − 12-bit per YUV color space component for high dynamic range • Ethernet simplifies architecture − Camera synchronization via IEEE 1588v2 PTP real-time clock − IEEE 1722 Layer 2 AVB transport protocol
TM
31
• • • • • •
64MHz e200 Core M-JPEG Video Encoder Real-Time Ethernet 512K Flash 64K Data Flash 96K SRAM
… samples available TM
32
System Cost
Phase 1 – 2013 SOP Ethernet Proof of Concept 9LVDS Elimination 9Ethernet proven in mass production
Imager
Qorivva 56A0
Phase 2 – 2015 SOP Systems Cost Reduction Through Integration
Phy
+ISP
9BroadRreach phy integrated through SiP (stacked die wire bond) 9Small low cost package (8x8mm) 9Cost, size, complexity reduction
Qorivva 56A1
Imager
KEY VALUE: SPACE Reduction 1. 2.
+ISP
Primary focus (phase2): High level integration to save cost and footprint Secondary focus (phase3): Image signal processing integrated to save cost and power at sensor location
TM
33
Phase 3 – 2017 SOP Value Added Features 9Image signal processing integrated (monolithic) 9BroadRreach phy integrated through SiP (stacked die wire bond) 9MCU + Sensor bundled
Imager
Qorivva 58A2
+ISP
System Integration
•
Qorivva 56A1
Lane/ Object detection etc.
Qorivva 56A1
Ethernet switch
Qorivva 56A1
1 Gbit Ethernet
Qorivva 56A1
GPU 3D
Infotainment MCU – i.MX A9
APEX
GPU 3D
i.MX6
SCP2201
DRAM(s)
Flash
DRAM(s)
ADAS ECU TM
Head Unit Display
Video encode
ARM926
Flash
IPU
3D model -Image stitching: •Vertex shading •Pixel shading •Resizing •Video encode
Infotainment ECU 34
TM
Autonomous cars shall provide 1. Fun when driving 2. Comfort when living in it 3. Safe environment all the time Sensor data processing and features extractions ⇒ Object
Modeling of environment ⇒ Mapping of reality
Navigation & assisted driving ⇒ Self Driving
Actuation ⇒Steering, braking, accelerating + Head Unit
Fusion of object with the goal of replacing for the longest time possible the driver. Fundamental requisites: • Large Computational Performance and BW to handle massive data • A Simple Safety Concept: not simply a Fail-SAFE but in the essence an Available system (almost Fail Operational) TM
36
• •
•
• •
It can not be approached as a traditional ESC or EPS system. − Lock Step is not the solution as it reduces availability We can learn from other markets (medical or avionic) − multi MCU architecture which requires also a strong SW solution to compare & control the individual MCU results The Safety Target set to ASIL-D can be argued − As long as the control of the vehicle is shared between the various systems (steering, braking ECUs) the safety integrity level of the Fusion ECU could be reduced to C − If not acceptable, then multiple mC architecture is more suited (it all depends on the time to give back control) It is valuable to merge Machine Vision or Radar Decision Unit and fusion but only if the SW/HW complexity is manageable Freescale ADAS portfolio of high performing, easily expandables and strongly networked mC offers a valid selection of SoC to pick from to build a Safe system
TM
37
Ethernet
Ethernet
ASIL B
i.Mx6
Qorivva 57A7
ethernet
CAN /FlexRay - Control
ASIL D CAN /FlexRay - Control
Fusion Module – ASIL D i.Mx6Q . 8000DMIPS 4 x Cortex A9 @800MHz 32K I-cache + 32K D-cache per core 1M unified L2 cache . 4 watts C40 low power process Cortex A9 with Dynamic voltage & frequency scaling Power gating Dynamic clock gating . ASIL B Trustzone MMU Watchdogs Redundant clock generation Clock monitoring Redundant peripheral bridges & peripherals Supply monitoring Die temperature monitoring
Qorivva 57A7
Performance
Power
Safety
TM
Performance 1700 DMIPS 2 x zen e200z7 @266MHz 16K I-cache + 16K D-cache per core Zen e200z4 @133MHz Power 2 watts C55 general purpose process Minimal use of Lvt transistors Dynamic clock gating Safety ASIL D Delayed lockstep z4 1.5M SRAM with ECC (including address) ECC on all RAMs End 2 end ECC on all system buses Built-in Self test of all logic and memories 4M Internal Flash with ECC (including address) Redundant clock generation Clock monitoring Supply monitoring Die temperature monitoring 38
Ethernet
Ethernet
Qorivva 57A7
ASIL D
Zipwire
Qorivva 57A7
CAN /FlexRay - Control
ASIL D CAN /FlexRay - Control
Fusion Module – ASIL D 2 x Qorivva 57A7 Performance 3400 DMIPS 4 x zen e200z7 @266MHz 16K I-cache + 16K D-cache per core 2 x Zen e200z4 @133MHz Power 4 watts C55 general purpose process Minimal use of Lvt transistors Dynamic clock gating Safety ASIL D 2 x Delayed lockstep z4 3M SRAM with ECC (including address) ECC on all RAMs End 2 end ECC on all system buses Built-in Self test of all logic and memories 4M Internal Flash with ECC (including address) Redundant clock generation Clock monitoring Supply monitoring Die temperature monitoring TM
39
Ethernet
Ethernet
ASIL B
i.Mx6
ASIL B
i.Mx6
PCIe
CAN /FlexRay - Control
CAN /FlexRay - Control
Fusion Module – ASIL C/D 2 x i.Mx6 Performance
.
2 x 8000DMIPS 8 x Cortex A9 @800MHz 32K I-cache + 32K D-cache per core 2 x 1M unified L2 cache Power
.
8 watts C40 low power process Cortex A9 with Dynamic voltage & frequency scaling Power gating Dynamic clock gating Safety ASIL C/D Trustzone MMUs Watchdogs Redundant task assignment External Flash with 128 bit AES signature Redundant clock generation Clock monitoring Redundant peripheral bridges & peripherals Supply monitoring Die temperature monitoring TM
40
.
TM
Closed Platform Operating System
• Fast time-to-market • Low invest • Differentiation only on cost • Low OEM differentiation • Low profit • Patent restrictions
Application
Object Classification
Feature Extraction
Image Signal Processing Tier1 IP TM
42
3rd Party IP
Closed Platform
General Purpose Platform
High invest with late return
Operating System
Operating System
• Fast time-to-market • Low invest • Differentiation only on cost • Low OEM differentiation • Low profit • Patent restrictions
Application
Object Classification
Feature Extraction
Application
Object Classification
Feature Extraction
Image Signal Processing
• Differentiation not limited • High initial invest for algorithms and SW • Late return of invest
Image Signal Processing Tier1 IP TM
43
3rd Party IP
Closed Platform OS Partners
Operating System Application
App. SW Partners !!
Object Classification
Feature Extraction
General Purpose Platform
Freescale Platform
CogniVue SW & Services
Operating System
Operating System
Application
Application
Object Classification
Object Classification
Feature Extraction
Feature Extraction
Image Signal Processing
Image Signal Processing
BENEFITS
• Open platform ⇒differentiation • Balanced initial invest • Improved timeto-market • Optimized value creation
Freescale Libraries Image Signal Processing
Tier1 IP TM
44
3rd Party IP
TM
Product Qual Proposal Planning Execution
Machine Vision Front – Side Fusion
Applications Radar & Vision
Samples Production
i.MX58Ax 600/800MHz w/ APEX2 CL Quad & Dual – H.264/GPU
i.MX58Ax
SCP2201/07
360° Seeing & Sensing Park assist
350MHz APEX-1 16 MByte DRAM
MPC560xE 64MHz ENET, MJPEG 512K
Qorivva 5601 64MHz ENET, Phy, MJPEG 512K
MPC567xK
Qorivva 58Ax
180MHz FlexRay, ENET 1M – 2M
Radar Long Mid/Short Front & Side
Qorivva 58Ax
Qorivva 57A7 266MHz, SPT FlexRay, ENET 3M – 4M LRR /MRR Radar
MPC564xL 120MHz FlexRay 1M
Qorivva 58Ax Qorivva 57P4 180-200MHz, Dual EL Mot Ctrl ENET 1.5M – 2.5M
2013
2014
Gen 1
Gen 2 Proposal
TM
2015
Planning
2016 Gen 3
Execution
Production 46
Single Core Dual Core Multi Core
2017
Front Looking and 360° sense radar for performing and system cost optimized solutions Vision Systems with Image cognition on an Open SW Platform Safety without compromising Performance Miniaturization Data BW management - Ethernet
Safety TM
47
TM
48
TM