B.Tech. (Sem. -6th) INDUSTRIAL AUTOMATION AND ROBOTICS ...
Recommend Documents
In this book for the optimisation of assembly conveyor lines we are dealing with series part production featured by a me
47. VI SEMESTER. DIGITAL COMMUNICATION. Subject Code. : 10EC61. IA
Marks. : 25. No. of Lecture Hrs/Week : 04. Exam Hours. : 03. Total no. of Lecture ...
... noted span class news dt Sep 06 2017 span nbsp 0183 32 Startups news from the including the latest news articles quo
ROBOTICS AND INDUSTRIAL AUTOMATION. PE-520. ~-. Time Allowed: 3 Hrs.
Max. Marks: 100. Note: Attempt any five questions. Q1. a) features. b). Q2. a).
Internet is the union of software and big ... merges big iron with big data to create ..... Figure 9: Nokia Imagining Io
analytics tools has changed that reality. For the first time in .... merges big iron with big data to create brilliant m
International Conference on Robotics and Automation ... Current robot programming prim- ... centered programming primitives has been very successful in other ...
Dec 7, 2011 ... 7th sem. CSE. B.Tech. 3rd sem CSE. B.Tech. 7th sem. IT. B.Tech. 3rd sem IT. B.
Tech. 5th sem. CSE. B.Tech. 1st sem CSE. B.Tech. 5th sem. IT.
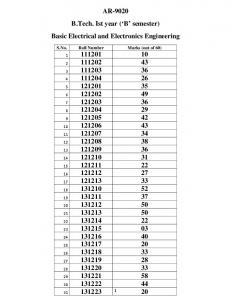
AR-9020. B.Tech. Ist year ('B' semester). Basic Electrical and Electronics
Engineering. S.No. Roll Number. Marks (out of 60). 1. 111201. 10. 2. 111202. 43.
3.
Continuous and Discontinuous Operation of Automatic Control Systems. 3.
Analysis and Design ..... Computer-Controlled Systems: Theory and Design.
London ...
edge innovations in robotics, automation, and machine intelligence that result in the most environmentally-friendly and humanity-sensitive ... âROVERS IN SPACEâ PPT PDF. 1971 Lunar ... global path-planning, Obstacle avoidance, Systems.
Q7) Calculate all the necessary elements required to set out a 1 in 8.5 turnout, taking off from a straight B.G track wi
Construction productivity on large projects, including road construction, has been
... automated road construction equipment is improvement in work safety and.
Dec 6, 2013 ... MODEL QUESTION PAPER. Time: 3 ... D. Quaternary ammonium salts ... C. Base
sugar and phosphate group D. Sugar and phosphate group.
Jul 25, 2012 ... 1.. [Please write your Exam Roll No.) Exam Roll Ne. .35} _. END TERM
EXAMINATION. Sucre Semss'rea [BCA] MAY—JUNE 2009 Paper Code: RCA-
304 .
Syllabus Semester wise separated & shared by : www.annaunivedu.org ....
Shigley J.E and Mischke C. R., “Mechanical Engineering Design”, Sixth Edition,
Tata.
Dec 5, 2012 - Automated species detection: An experimental approach to kelp detection from ... in this paper is from a single campaign at a reference site.
International Conference on Robotics & Automation ... prosthetic hand devices, can lead to large grasping forces ... mechanisms, lead to an adaptive grasp.
ABSTRACT. Autonomous robot task execution requires that the end- effector of the robot be positioned accurately relative to a reference world coordinate frame.
physics phenomenon which states that when looking at an image through a ..... Automotive industry is in many areas of automation ...... Mastering Regular Expressions, 2nd. Hetland ...... robot at configuration q is in collision with an obstacle.
Mar 2, 2018 - Definition 0.2.3 Two linear control system are F-equivalent, i.e. Ï â¼= F Ï ââ (âP, det P = 0, ...... Sur l' evaluation du domaine d'existence des fonc- ..... Exercise 2.7 Consider a system of linear equations Ax = b, AnÃn, wi
Delft Center for Systems and Control, Delft University of Technology. Mekelweg 2, 2628 CD Delft, ...... of an AE is up to the blackboard style known from artificial ...
B.Tech. (Sem. -6th) INDUSTRIAL AUTOMATION AND ROBOTICS ...
INDUSTRIAL AUTOMATION AND ROBOTICS. SUBJECT ... [Note: Please
fillsubject code and paper ill on OMR] ... Attempt any Four questions from Section
- B.
Roll No. ...................... Total No. of Questions: 09]
[Total No. of Pages: 02
-
B.Tech. (Sem. 6th) INDUSTRIAL AUTOMATION AND ROBOTICS
...
SUBJECT CODE: PE
Paper
..
-408
ID : [A0866]
[Note: Please fill subject code and paper ill on OMR]
Time:
'Maximum Marks:
03 Hours
Instruction
60
to Candidates:
1)
Section - A is Compulsory.
2)
Attempt any Four questions from Section - B.
3)
Attempt any Two questions from Section - C. Section
-
I ..
A
a)
(10 x 2 = 20) How sampling frequency is selected in Analogue to digital conversion?
b)
Covert 101101.101 to its decimal equivalent.
c)
Write De-Morgan theorems. -
d)
What is a cushion.end cylinder?
e)
Define Automation.
t)
What is pressure regulating valve?
g)
What is pilot operation?
h)
Sketch a non-return type flow control valve.
i)
Name two methods by which path is controlled by robot controller.
j)
What is a work space in robot?
Q1)
J-1074[8129J
P.T.o.
Section
-
B (4?:!.5 = 20)
Q2) Simplify the following Boolean expressions (a) Y (b) Y .
= A.B.C = A.B. C
+ A.B.C + A.B.C + A .B.C + A.C + A .B.C + A.B.C + A.. B.C
Q3) What are the various transfer mechanisms? Discuss. Q4) Discuss . successive approximation converSIOn.
method for- Analogue to Digital
Q5) What is a microprocessor? Discuss the design and architecture microprocessor with the help of a neat sketch.
of
Q6) How robots are classified based on coordinate system? Discuss any two of them with the help of neat sketches. Section - C
(2 x 10
=20)
Q7) (a) Write ladder logic diagram for the following functions . OR . AND . NAND . NOR . XOR (b) Design a pneumatic valve ckt to give the sequence A+ followed by B+ and then simultaneously followed by A- and BQ8) What are the different fluid power control elements? Discuss. Q9) Derive expression of voltage output for half bridge strain gauge ckt used as force sensor in robotic systems.


























![[PDF] Industrial Automation and Robotics: An ... - Google Sites](https://m.moam.info/img/260x300/pdf-industrial-automation-and-robotics-an-google-s_6477a04e097c4786708beb32.jpg)