IEEE SIGNAL PROCESSING LETTERS, VOL. 20, NO. 12, DECEMBER 2013
1147
Complexity Outage Probability of MIMO Detection in Multiple-User Scenario Yuan Qi and Rongrong Qian
Abstract—This letter presents the complexity study of multipleinput multiple-output (MIMO) detection in a multiple-user scenario. For variable-complexity MIMO detection in multiple-user systems, the complexity outage probability, defined as the probability of event that the complexity exceeds some complexity constraint, is proved to have a Chernoff-type upper bound that decays exponentially with an increasing number of users. The closed-form expression of such a Chernoff-type upper bound is also derived. Index Terms—Complexity, Multiple-input multiple-output (MIMO), MIMO detection, performance.
I. INTRODUCTION
A
S a research field closely related to signal processing, communication, and coding theory, multiple-input multiple-output (MIMO) detection has already attracted much attention from academics. To evaluate the applicability of detection algorithms, many previous works [1]–[4] involved analyses of the complexity of MIMO detection. In [1], the expected complexity of the sphere-decoding (SD) algorithm averaged over the noise and the lattice was studied. The first attempt to analyze the SD complexity distribution in terms of tail exponents was made in [3]. According to [4], the SD complexity exponent was introduced to describe the computational power required by the SD algorithm to achieve the decoding performance arbitrarily close to the optimal. In fact, the tail exponent and the complexity exponent of SD investigated in [3] and [4] were defined on the basis of the complexity outage probability of SD. The complexity outage probability of MIMO detection, describing computational outages, will inevitably have an impact on detection error probability, when time-limited implementation is required [4]. Thus the complexity outage probability lays a foundation of investigating the complexity of MIMO detection and Manuscript received May 30, 2013; revised July 29, 2013; accepted September 13, 2013. Date of publication September 23, 2013; date of current version September 30, 2013. This work was supported by the Young Scholar Innovation Fund of BUPT under Grants 2013RC0210 and 2012RC0507, and by the National Science and Technology Major Projects under Grants 2012ZX03003011, 2012ZX03003007, and 2013ZX03003012. The associate editor coordinating the review of this manuscript and approving it for publication was Prof. Azadeh Vosoughi. Y. Qi is with School of Electronic Engineering, and also with the Wireless Signal Processing and Network Laboratory, Key Laboratory of Universal Wireless Communication, Ministry of Education, Beijing University of Posts and Telecommunications (BUPT), Beijing, China (e-mail:
[email protected]). R. Qian is with Automation School and also with the Wireless Signal Processing and Network Laboratory, Key Laboratory of Universal Wireless Communication, Ministry of Education, Beijing University of Posts and Telecommunications (BUPT), Beijing, China (e-mail:
[email protected]). Color versions of one or more of the figures in this letter are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/LSP.2013.2283091
plays a vital role in evaluating how much computational power should be reserved for certain detection performance. To the authors’ knowledge, most studies on the complexity of MIMO detection were based on single-user assumption [1]–[4]. On the other hand, for multiple-user scenarios, previous literatures mainly focused on analyzing multi-user diversity ([5] and references therein). Only a few works investigated the complexity of MIMO detection in multiple-user scenarios (see [6], [7]). However, these works concentrated on certain detection schemes. Thus the results obtained therein were only suitable for a limited number of cases. In this letter, we focus on the complexity of MIMO detection in a multiple-user scenario, aiming to attain outcomes available for general variable-complexity MIMO detectors. The main contributions of this work may be summarized as follows: • It proves that, for general variable-complexity MIMO detectors in multiple-user systems, the complexity outage probability has a Chernoff-type upper bound that decreases exponentially with an increasing number of users. • The closed-form expression of the above Chernoff-type upper bound is derived, which has a unified form for all the variable-complexity MIMO detectors. However, different detectors will get different results from this expression due to these detectors’ own features. Thus we can characterize and compare different MIMO detectors in multiple-user scenarios under the framework of the Chernoff-type upper bound. II. MIMO DETECTION IN A MULTIPLE-USER SCENARIO A. System Model and Complexity Model users (e.g., Consider that a multiple-access system with the base station system ([8], Ch.1.4)) employs the spatial-multiplexing MIMO technology for its uplink (a.k.a. reverse-link), antennas and where every user transmits uplink signals with antennas. Owing a receiver detects the uplink signals with to the technologies of multiple-access, e.g., time-division multiple-access (TDMA) and frequency-division multiple-access (FDMA) ([8], Ch.14.2), the uplink signals from different users arriving at the uplink receiver are uncorrelated. Therefore, centralized processing can be applied at the receiving side of uplink, which means that for each user a variable-complexity MIMO detection algorithm can be performed independently but multiple users’ detection algorithms share computational power. In other words, MIMO detection for users is executed in a centralized but not joint fashion.
1070-9908 © 2013 IEEE
1148
IEEE SIGNAL PROCESSING LETTERS, VOL. 20, NO. 12, DECEMBER 2013
The signal from the -th user can be written as , where the channel matrix has i.i.d. entries with unit variance, the transmit vector is normalized such that the average transmit power at each antenna in each symbol period equals 1, and white Gaussian noise vector has i.i.d. entries, denotes the noise variance. The complexity of algorithm for the -th user is variable1, which shall be a function of , and and can be denoted by . For brevity of notation, we simply write instead of . As did in [6], [7], let with be i.i.d. random variables by assuming that , and are i.i.d. for different users. Suppose that each element of belongs to a fixed and finite constellation with constellation size , e.g., traditional modulation schemes such as QPSK and 16QAM. Thus, the complexity random variable would have finite possible values. Assume that, being i.i.d. random variables, has the minimum value and maximum value for any , i.e., (1) For instance, if the algorithm is SD for which the complexity is always measured by the number of nodes visited in the search tree [1], [2], we shall get and . Because to obtain the estimate of transmit vector , SD at least needs to visit nodes of the search tree, and there are at most nodes on the search tree where . B. Complexity Constraint and Complexity Outage In practical systems, subjected to the capability of hardware, users’ signal detection should be limited in a certain time period to satisfy real time processing requirement. For example, the receiver of base station always has to finish detecting the uplink signals from all users in one radio frame. Such time period is also known as the run-time limit [4]. When the execution time of a detection algorithm exceeds the run-time limit, the algorithm will be forced to terminate which leads to an increased detection error probability. Since the run-time of the algorithm hinges on the complexity of that algorithm, the run-time limit actually imposes a complexity constraint on the algorithm, see (2) below. If the complexity is constrained in our considered multipleuser deployment where the computational power at receiving side is shared by users, it would be in the form as
probability needs to be acceptable to each user. Let be the event that, without any complexity constraint, the MIMO detection algorithm obtains an error result for , i.e., , while its probability is called the error probability of the -th user and equals . Hence, the error probability of the -th user by taking the complexity constraint into consideration can be written as
(3) where is the error event of the -th user under the complexity constraint (CC) of (2), denotes the complexity outage event of MIMO detection algorithm when the sum complexity, , exceeds the complexity (i.e., ), and is the constraint, complement of the event. The inequality follows from . The above leads to the below result. Theorem 1: Define as the performance gap between the error probabilities of MIMO detection algorithm with and without complexity constraint for the -th user. It can be obtained that
(4) actually quantifies the performance loss owing to where the impact of the complexity constraint. Proof: (4) can be derived by substituting (3) into the definition of . III. COMPLEXITY OUTAGE PROBABILITY Another important result of this study, which reflects the property of complexity outage probability, can be derived as follows. Theorem 2: If with denoting any one of , the complexity outage probability has a Chernoff-type upper bound given as (5) where
(6) (2) is the complexity constraint of all users, dewhere notes the complexity constraint per user and is the empirical mean of . In a multiple-user scenario, although the complexity constraint is placed on the sum complexity of all users, the error 1It is because that the algorithm may be a heuristic search (e.g., SD) or equipped with a channel adaptive detecting strategy (e.g., [9]).
Proof: See the Appendix. From (6), it is known that and . Define
is determined by and . Substituting into (6) yields
(7)
QI AND QIAN: COMPLEXITY OUTAGE PROBABILITY OF MIMO DETECTION
1149
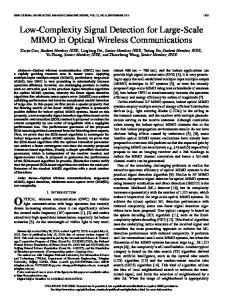
Fig. 2.
curves of SD algorithm that change with given ; 2 2 and 4 4 denote the settings of MIMO channel, while QPSK and 16QAM are the modulation schemes.
Fig. 1. Illustration of
which is a function of
Based on the definition of
and
.
, the condition in Theorem 2 is equivalent to . Note that (7) can be
illustrated by Fig. 1. Hence the following corollary can be given. Corollary 1: If approaches zero (i.e., ), would grow infinitely large and thus (which equals ) would decrease dramatically, which in turn implies shall be considerably small. IV. DISCUSSIONS AND NUMERICAL RESULTS By combining Theorems 1 and 2, it can be deduced that owing to the impact of the complexity constraint, the performance gap is upper-bounded by that decays exponentially with an increasing number of users , when the complexity constraint per user is fixed. Thus, increasing the number of users, , could weaken the impact of the complexity constraint. This finding reflects a special benefit of the centralized processing (via sharing the computational power) of MIMO detection for multiple users. In fact, for different MIMO detection algorithms, due to their respective features, the Chernoff-type upper bound of complexity outage probability would act differently in practice. We will use to characterize and compare several representative algorithms of MIMO detection in a multiple-user scenario as follows. A. Beneficial Cases The MIMO detection algorithms are called beneficial cases if really implies benefit for them. 1) SD Algorithm [1], [2], [11]: For SD, it is generally proposed to set the radius based on the noise variance as [1], [2]. In this case, the complexity statistics of SD changes with , and so does the value of . To verify this as well as to show that SD is a so-called beneficial case, a simulation is performed in which SD algorithm employs the depth-first search with Schnorr-Euchner strategy [11], and the Babai points (i.e., the first node in ([11], Eq. (15))) are always visited no matter whether they fall inside the sphere or not so as to guarantee at least one estimate of is obtained. Then, the
complexity of SD measured by the number of nodes visited in the search tree [2], satisfies and . Our simulation focuses on of SD which is the key item determining . The numerical results are presented in Fig. 2, from which it can be observed that grows as (i.e., signal-to-noise ratio, (SNR)) increases. The trend that approaches 1 can be seen at SNR around 15 dB and 25 dB for QPSK and 16QAM cases, respectively. Therefore, it can be expected that SD could have small such that decreases sharply with , especially when SNR is large. 2) Threshold Receiver (TR) Algorithm [9]: By comparing the condition number of channel matrix with a dedicated threshold , the TR algorithm [9] selects zero-forcing (ZF) estimate or maximum likelihood (ML) detection to detect signals. If , ML detection with fixed complexity will be selected by TR; otherwise, the ZF estimate with fixed complexity will be chosen. Thus, as a random variable, the complexity of TR, denoted by , has two possible values that are independent of noise, i.e., . Applying the framework of this study, we get . Fig. 3 presents the curves of for Rayleigh and Ricean fading 4 4 MIMO channel. It can be known that of TR shall grow as the threshold increases and TR can have small such that decreases sharply with , especially when is large. In summary, for these beneficial cases, when a fixed complexity constraint is set and the condition “ approaches zero” can be satisfied, e.g., SNR is high enough in 1) or is large enough in 2), would become considerably small with the increase of because the upper bound decays exponentially. Therefore the negative impact of the complexity constraint could be eased by increasing the number of users in centralized processing systems. B. Non-Beneficial Cases If the probability of MIMO detection algorithms is hard to clarify and investigate, or tends to zero, the upper bound will become meaningless, and these algorithms would be the non-beneficial cases. In other words, increasing the number of users can hardly weaken the impact of the complexity constraint for non-beneficial cases of algorithms. For example, to the authors’ knowledge, it is still
1150
IEEE SIGNAL PROCESSING LETTERS, VOL. 20, NO. 12, DECEMBER 2013
Then, the Chernoff bound of ([10], (2.1-193))
can be obtained as
(11) where
. Let (12)
Since , we would get
Fig. 3. The cumulative distribution function of condition number of channel . It is for 4 4 matrix with Rayleigh and Ricean faded entries, i.e., MIMO channel.
difficult to clarify and investigate the probability of the semidefinite relaxation (SDR) detector algorithm [12]. V. CONCLUSION By analyzing the complexity outage probability, we gained an insight into the complexity of variable-complexity MIMO detection in a multiple-user scenario and revealed a special benefit underlying the centralized processing of variable-complexity MIMO detection for multiple users.
(13) Meanwhile, as long as , it holds that , because and is a monotonic decreasing function of . From (9), (11) and (12), we further have (14) Since
is the Chernoff bound of the Chernoff-type upper bound of
, we call in this
letter. APPENDIX PROOF OF THEOREM 2 To start the analysis, with variables below
REFERENCES , define the random
(8) and are the minimum and maximum values of where as in (1), respectively. It is apparent that and . Moreover, we can get , and thus which yields (9) As an upper bound of is easier to be analyzed. Hence, we turn to investigate . Let denote any one of , which has the mean , where denotes expectation. For any with positive real number , by solving the equation obtained from ([10], (2.1-192)), (10) where is unknown and satisfies above equation, denoted by , is
. The solution
of the
[1] B. Hassibi and H. Vikalo, “On the sphere-decoding algorithm I. Expected complexity,” IEEE Trans. Signal Process., vol. 53, no. 8, pp. 2806–2818, Aug. 2005. [2] J. Jalden and B. Ottersten, “On the complexity of sphere decoding in digital communications,” IEEE Trans. Signal Process., vol. 53, no. 4, pp. 1474–1484, Apr. 2005. [3] D. Seethaler, J. Jalden, C. Studer, and H. Bolcskei, “On the complexity distribution of sphere decoding,” IEEE Trans. Inf. Theory, vol. 57, no. 9, pp. 5754–5768, Sept. 2011. [4] J. Jalden and P. Elia, “Sphere decoding complexity exponent for decoding full rate codes over the quasi-static MIMO channel,” IEEE Trans. Inf. Theory, vol. 58, no. 9, pp. 5785–5803, 2012. [5] L.-N. Tran and E.-K. Hong, “Multiuser diversity for successive zeroforcing dirty paper coding: Greedy scheduling algorithms and asymptotic performance analysis,” IEEE Trans. Signal Process., vol. 58, no. 6, pp. 3411–3416, 2010. [6] R. Qian et al., “On the scale effects oriented MIMO detector: Diversity order, worst-case unit complexity and scale effects,” Signal Process., vol. 93, no. 1, pp. 277–287, 2013. [7] R. Qian et al., “Exploiting scalar effects of MIMO detection in could base-station: Feasible scheme and universal significance,” in Proc. IEEE Globecom Workshops (GC Wkshps), Dec. 2012, pp. 216–221. [8] A. Goldsmith, Wireless Communications. Cambridge, U.K.: Cambridge Univ. Press, 2005. [9] J. Maurer, G. Matz, and D. Seethaler, “Low-complexity and full-diversity MIMO detection based on condition number thresholding,” in Proc. Acoustics, Speech and Signal Processing Conference (ICASSP), Honolulu, HI, USA, Apr. 2007, vol. 3, pp. 61–64. [10] J. G. Proakis, Digital Communications, 4th ed. New York, NY, USA: McGraw-Hill, 1995. [11] E. Agrell, T. Eriksson, A. Vardy, and K. Zeger, “Closest point search in lattice,” IEEE Trans. Inf. Theory, vol. 48, no. 8, pp. 2201–2214, Aug. 2002. [12] A. Wiesel, Y. C. Eldar, and S. Shamai, “Semidefinite relaxation for detection of 16-QAM signaling in MIMO channels,” IEEE Signal Process. Lett., vol. 12, no. 9, pp. 653–656, Sep. 2005.