Dec 3, 2014 - estimation problem in NCSs under communication resources constraints. The facts that the sensors have limited battery power and bandwidth ...
Proceedings of 2014 International Conference on Modelling, Identification and Control, Melbourne, Aus tralia, December 3-5, 2014
Data-driven state estimation under limited communication resources Duo Han*
Abstract-Remote state estimation in networked control sys tems always consumes too much sensor battery
power and
communication bandwidth. Under power and communication constraint, we seek a desirable tradeoff" between communication rate and estimation performance in terms of estimation error covariance. We propose two data-driven sensor scheduling strate gies to achieve that goal. We prove that under our strategies the minimum mean squared error (MMSE) estimator is a Kalman
Fig. 1.
like filter which maintains linearity. We give the explicit MMSE
General system model for networked control system.
estimator under each strategy. In the end we conduct numerical experiment to show the superiority of our design.
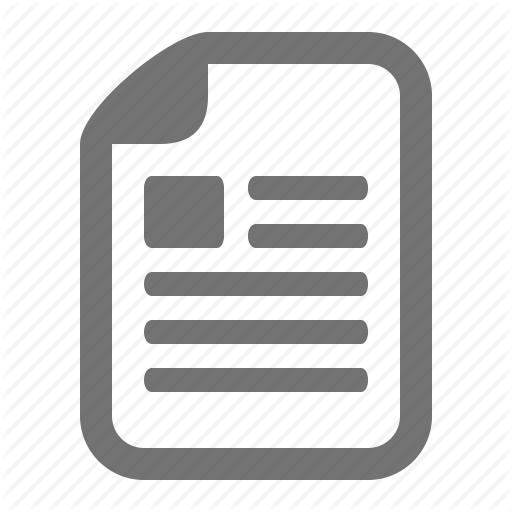
scheduling solution to the problem of optimizing estimation performance with limited communications. The difficulty in I. INTRODUCT ION designing sensor scheduling strategies is the nonlinearity intro Networked control systems (NCSs) have been an active duced renders the derivation of MMSE estimator intractable. research area in the last decade. Murray et al. [1] pointed out In our work, we design two different stochastic data-driven the huge potential of NCSs in aerospace,public transportation, sensor scheduling strategies to balance the tradeoff between robotics, biology, etc. Due to the advanced technology in estimation performance and conununication rate. We show that communication, computation and embedded systems, NCSs the resulting MMSE estimator is Kalman-like filter which is now are widely used in military, commercial, and scientific easily implemented. applications [2]. Wireless communication has been taking over The remainder of the paper is organized as follows. Section the information exchange tasks for both control and estimation II formulates the data-driven state estimation problem and frameworks. The general model is depicted in Fig. 1. The proposes the strategies. Section III introduces the correspond classic control and estimation theory meets many challenges ing MMSE estimator for each strategy. Section IV presents when dealing with imperfect communication,such as packet numerical results. Conclusion and appendix are given in the dropouts,delay,and compromised data [3] [4] [5]. Therefore, end. we have to take communication into account when formulating Notation: §'t and §'t+ are the sets of n x n positive semi modem control and estimation problems. definite and positive definite matrices. When X E §'t, we In this paper,we focus on the problem that the remote state simply write X 2: 0 (or X > 0 if X E §'t+). N(/L,�) denotes estimation problem in NCSs under communication resources Gaussian distribution with mean /L and covariance matrix �. constraints. The facts that the sensors have limited battery lE[·] denotes the mathematical expectation and PrO denotes power and bandwidth and the cost of replacement of sensors the probability of a random event. is very high are well known [6]. The communication energy consumption is the main concern of ours. Each transmission II. P ROBLEM SETUP costs some power and the sensor cannot send the data packet Consider the following Gauss-Markov system: to the estimator at each time during its duty period. In order to make the best use of the sensor network which collects (1) Xk + l AXk + Wk, the observations of internal states of the monitored process, (2) Yk CXk + Vk, the power must be wisely used. The well-known Kalman filter [7] [8] is used to estimate the state by exploiting where Xk E IRn is the state vector, Yk E IRm is the the information of all received measurements. We use the sensor measurement, Wk E IRn and Vk E IRm are mutually estimation error covariance as our utility metric. The goal is uncorrelated white Gaussian noises with covariances Q 2: 0 to design some sensor schedule strategy to achieve a desirable and R > 0, respectively. The initial state Xo is zero-mean � tradeoff between the utility and communication cost. This Gaussian with covariance matrix lE[xox ] ITo 2: 0, and problem has been extensively studied recently [9] [10] [11] is uncorrelated with Wk and Vk for all k 2: O. (A,C) and [12]. Yang et al. [13] showed that the optimal offline strategy (A, y7J) are observable and controllable, respectively. After under limited communication times is to transmit data as collecting the observation Yko the sensor decides to send uniform as possible. Imer et al. [14] proposed an stochastic the data packets or not. Let 'Yk be the decision variable: 0 means not. Define 1 means Yk is sent and 'Yk 'Yk *: Department of Electronic and Computer Engineering, Hong Kong the information set as Ik � bo . . . with I-I � 0, ,'Ykyd Yo, University of Science and Technology, Clear Water Bay, Kowloon, Hong Kong. Email: dhanaa@usLhk. xl; � lE[xkIIk-l ],yl; � lE[YkIIk-l ],el; � Xk -xl; ' Pk � =
=
=
=
196
=
Proceedings of 2014 International Conference on Modelling, Identification and Control, Melbourne, Aus tralia, December 3-5, 2014 ,
� � JE[e;;e;; � IIk-l ], and Xk � JE[xkIIk], ek Xk -Xk, Pk JE[eke IIk]. The estimates x;; and Xk are called the a priori
and a posteriori MMSE estimate,respectively. Further define the measurement innovation as Zk � Yk -JE[YkIIk-I]. The first arising question is what rule the sensor will follow to make the decision at each time step. The naive idea is to set a duty cycle letting the sensor send the data packets periodically or blindly drop some observations in a period. However,this offline method always works inefficiently and sacrifices the estimation performance too much. Wu et al. [15] proposed an online feedback scheduling scheme. They compare the pre-defined threshold and the lCX) norm of the normalized covariance of Zk and then the sensor makes a decision based on the comparison results. Nevertheless, the drawback is that the usage of their event destroys the Gaussian properties of the conditional distribution of Xk given Ik-I and makes the estimation problem compu tationally intractable. To facilitate the computation,they have to approximate it as the Gaussian distribution and propose an approximate MMSE. In this paper,we want to reformulate the decision rule to maintain the Gaussian properties after each measurement update and therefore derive the exact MMSE. As the energy consumed when the sensor is listening to the channel is considerable, we try to remove the feedback communication to save more energy. In the following sections, we will present the novel decision rule and illustrate the desirable tradeoff between communication rate and estimate performance. III.
Normally,without any data-driven mechanism the estimator will simply do the prediction step when the sensor decides to stop sending the packets at time k, i.e.,
Xk = x;; = AXk-l , Pk = Pk- = APk-1A' + Q.
(3)
The concept of the data-driven schedule is that when the prediction of Xk, i.e.,the priori estimate of Xk is close to the true value of Xk, the sensor will hold the observation Yk and then the estimator will infer the closeness from the absence of Yk. This design is intuitively able to provide a more desirable tradeoff between the communication rate and the estimation performance than the strategy (3),which will be shown later. But how does the sensor define the closeness in an appropriate way and how does the estimator compute the best estimate in terms of mean-square error when Yk is unavailable? We will discuss it in the next sections. In this section we assume feedback is available from the estimator to the sensor,see Fig.l. At each time k, the estimator feedback Cx;;, Pi: to the sensor. We propose an data driven mechanism to decide whether the sensor transmits the observation data to the remote estimator at each time step. Let �k be an i.i.d. random variable with the probability density function rv
{ 0, '/k =
1,
f3 {3x -l , x E (0,1],{3 > O.
if if
� �k :s; exp(- Zk(e-1 -W;;I) Zk) ' � �k > exp(- Zk(e-I -W;;1) Zk) '
(5)
where e E jRmxm is a tunable positive-definite matrix,(3 is a tunable scalar. Under this scheduler,if '/k = 0, the estimator � can infer that �k :s; exp(- Zk(e-1 - W;;I) Zk) ' It is this additional information that helps reduce the estimation error at the remote estimator. Let
]
� �y �k, �kyy ' � � where �' x = JE[e;; e;; IIk-l ] = Pi:,� y = JE[e;; zkIIk-l ] = � JE[e;; e;; IIk_I]C' = Pi:C',� y = JE[(Ce;; + Vk)(Ce;; + vk) 'IIk-1] = CPi:C' + R. Before we give the MMSE
estimator under this scheduler,we first introduce a few useful lelmnas. Lemma 3.1: Consider the remote state estimation with the data-driven scheduler (5), the time update of the MMSE estimator is as follows:
x;; =AXk-1, Pi: =APk-1A' + Q.
Proof:The proof is straightforward. We have
x;; = AJE[Xk-1IIk-1] = AXk-1, ' Pi: = JE[(Aek-1' + wk-r)(Aek-1 + Wk-r) IIk-l ] = APk-IA + Q
M AIN RESULT S
A. TCP-like data-driven estimation
fE, (X) k
Assume that JE[zkzk!Ik-l ] = Wk > O. Then define the data driven sensor scheduling strategy as:
• which completes the proof. Lemma 3.2: Consider the remote state estimation with the data-driven mechanism (5). The following facts are true: 1) Xk and Yk conditioned on Ik-I are jointly Gaussian distributed with mean [x;; :Ok]' and covariance �k ' 2) Xk and Yk conditioned on bk = 0, Ik-d are jointly Gaussian distributed with mean [ak bk]' and covari-
ance
�k =
[���kx'xy
]
� �y k �YY
,where
ak = x;;,bk = O, � � � � � x = � x -� y(� y+ � � {3-I(e-1 (� y) -I) -I) -I � �, �kxy = �kxy({3�kyye-1 + (1 -(3) I) -1, � � � y = ({3e-1 + (1 -(3) (� y) -I) -I. Proof: 1) The initial state Xo is zero-mean Gaussian with � covariance matrix JE[xox ] = ITo. Define Io as the prior _
knowledge of the initial state. Thus
[ IT�
]
IT�C' CITo ' + R ) Assume that Xk and Yk conditioned on Ik-I are jointly Gaussian distributed with mean [x;; :0;;]' and covariance �k, i.e.,
(4) 197
iXl,Yl (x,YIIo) = N(O, C o
(6)
Proceedings of 2014 International Conference on Modelling, Identification and Control, Melbourne, Aus tralia, December 3-5, 2014
If 'Yk 1, the mean and the covariance of Xk and Yk conditioned on bk y,Ik-d are computed using 1, Yk the measurement update equations of the standard Kalman filter,which implies Xk and Yk conditioned on {'Yk I, Yk 0, Xk y,Ik-d are jointly Gaussian distributed. If 'Yk and Yk conditioned on bk 0, Yk Y,Ik-d are jointly Gaussian distributed from Lemma A.6.1 b). Therefore,Xk and Yk conditioned on bk,Ik-l } are jointly Gaussian distributed. Note that the time update of the modified Kalman filter at each time step has no effect on the Gaussian properties of each estimate and thus Xk and Yk conditioned on Ik are jointly Gaussian distributed. Therefore, by induction we prove the 1). 2) Since the assumption (6) always holds from k 0, from Lemma A.6.1 a),let x be Xk conditioned on Ik-l , Y be Yk-YI: conditioned on Ik-l and thus E[x] xl:,E[y] O. With some straightforward manipulation,we obtain =
Measurement update:
=
=
=
Xk Pk
=
=
=
=
=
det(8) . det(;J��y + (1 -;J)8)
xl: + 'YkLkZk, P;; -'YkLkCPk- - (1 -'Yk) FkCP;;,
where,
Lk Fk
=
=
P;;C'(CPk-C' + R) -l , P;;C'(CPk-C' + R + ;J(8-1 -(CP;;C' + R) -I) -I) -I.
Proof: The time update iteration is proved from lemma 3.1. Next,we prove the measurement update iteration. When 'Yk 1, i.e.,the measurement is sent to the estimator,the MMSE estimator is the standard Kalman filter. =
Xk Pk
(7)
Then from Lenuna A.6.1 b), for any two Borel-measurable
=
=
=
=
1 Pr(Xk E SI,Yk E S2 'Yk
=
When
'Yk
=
=
=
lkEsl lkEs2 Jdet(�k\(27l') m+n exp [-� ( x� -a' y� -b' ) �I: l ( �: = � )]
=
xl: + Lkzk, Pk- -LkCP;;.
0, compute Xk as
Xk
O,Ik-l )
=
=
=
E[XkIIk-l ,'Yk
=
0]
[: XfXk (XIIk-l ,'Yk
=
O) dx
xl:.
where the last equality is from lemma 3.2. Now compute as
dYkdxk,
Pk
where
=
=
=
E[(Xk -Xk)(Xk -xk) 'IIk-l ,'Yk
=
Pk
0]
[: (x -Xk)(X -Xk) ' fXk (XIIk-l ,'Yk
=
O) dx
P;; -FkCP;;.
The theorem gives the compact form of the MMSE in two • cases. By matrix inversion lemma,we can find that
� �x
=
� �y � �y Hence Xk and Yk =
=
B.
� � � � x -� y(� y+ ' (.1-1(8-1 _ (�kyy) -I) -I) -I �ky, � x � � � y(;J� y8-1 + (1 -;J) I) -l , � (;J8-1 + (1 -;J)(� y) -1) -1.
conditioned on bk 0,Ik-d are jointly Gaussian distributed with mean [ak bkJ' and covariance �k' =
UDP-like data-driven estimation
After we investigate the TCP-like data-driven remote es timation, we focus on the UDP-like, i.e., no feedback case in this section. We derive the MMSE estimator and the information filter, and compute the average communication rate. Let �k be an i.i.d. random variable with the probability density function
k
if, (X)
•
Unlike the Gaussian approximation in [15], we verify the statement (6) and make the event-based estimation problem computationally tractable. The form of the MMSE estimator is presented in the following theorem. Theorem 3.3: Consider the system (1) with the data-driven decision rule (5),the MMSE estimator is given recursively as follows: Time update:
xl: Pk-
=
=
AXk-l , APk-l A' + Q.
rv
;3 ;JX -1, X E (0,1 ] .
(8)
Then define the data-driven sensor scheduling strategy as: _
'Yk -
{ O, I,
if if
�k :s; exp(-t Y�YYk) ; �k > exp(-2Y�YYk) '
(9)
where Y E IRmxm is a tunable positive-definite matrix. Before we present the MMSE,we need to prove the following lenuna. Lemma 3.4: Consider the remote state estimation with the data-driven strategy (9). The following facts are true: 1)
198
Xk and Yk conditioned on distributed with mean [xI:
Ik-l YI:J'
are jointly Gaussian and covariance �k '
Proceedings of 2014 International Conference on Modelling, Identification and Control, Melbourne, Australia, December 3-5, 2014
Xk and Yk conditioned on {rk = 0,Ik-1} are jointly Gaussian distributed with mean [ak bk]' and covari-
2)
ance
� � 'x [ Uk = k �xy
]
� �y ,where �kyy k "kxy(" ak = xk -u U yy + (3-1y-1) -1Yk ' � bk = (I + (3� yy) -l y i;, ' �kxx = �kxx -�kxy(�kyy + (3-1y-l ) -1�kxy ' � � � � y = � y(I + (3� yY) -l , � � � y = ((� y) -l + (3y) -l .
A
Measurement update
A_
A_
qk = qi; + (1 -'Ik)C'R -1Yk, Pk-1 = (pi;) -l + C'[R + (1 -'Ik) (3-1y-l ]C. Remark 3.7: We can implement the multi-sensor data fu sion by using this information filter.
C. Communication Rate
Define the average communication rate as
The proof is similar to that of Lemma 3.2 and omitted. Theorem 3.5: Consider the system (1) with the data-driven mechanism (9),the MMSE estimator is given recursively as follows: Time update:
xi; = AXk-l , Pk- = APk-1A' + Q.
Lemma 3.8: Consider the system (1) with the event-based scheduler (9) and assume the system is stable,i.e.,p(A) < 1,
'I = 1 - J
Measurement update:
1
det(I + MyY)
Proof: Define
Xk = xi; + 'IkLkZk - (1 -'Ik) FkCxi;, Pk = Pi; -'IkLkCPi; - (1 -'Ik) FkCPi;,
Mx = klim COV(Xk), -+CX) My = klim COV(Yk), -+CX)
where
Lk = Pk-C'(CPi;C' + R) -l , Fk = Pk-C'(CPi;C' + R + (3-1y-l ) -1.
Proof: The time update iteration is proved from lemma 3.1. Next,we prove the measurement update iteration. When 'Ik = 1, i.e.,the measurement is sent to the estimator,the MMSE estimator is the standard Kalman filter. When 'Ik = 0, compute Xk as
For a stable system, we can get solving the Lyapunov equation
COV(Xk)
at steady state by
Since
Xk = IE[XkIIk-1,'Ik = 0] =
[: x!xk(XIIk-l ,'Ik = O) dx
we can obtain My. Since Yk follows an identically Gaussian distribution ofN(O, My), 'Ik is also an indentically distributed random variable.
= xi; -FkCxi;.
where the last equality is from lemma 3.4. Now compute as
Pk
Pr('Jk = OIYk = y)
d Pk = IE[(Xk -Xk)(Xk -x IIk-l ,'Ik = 0] =
[: (x -Xk)(X -Xk) ' !Xk(xIIk-1,'Ik = O) dx
J
•
The information filter is as follows: Time update:
�
exp(- (3Y�YYk) dYk
Define
qk � (Pk) -l Xk, qi; � (pi;) -l Xi;.
�
=IE[exp(- (3Y�YYk)IYk = y] CX) 1 1 exp(-2Yk, My-1Yk) . = J -CX) det(My)(21f) m
= Pi; -FkCPi;. Corollary 3.6:
�
=Pr(�k :s; exp(- Y�YYk)IYk = y)
J
1
det(I + (3MyY)
Therefore,
qi; = (pi;) -l APk-l qk-l , Pi; = APk-l A' + Q.
•
199
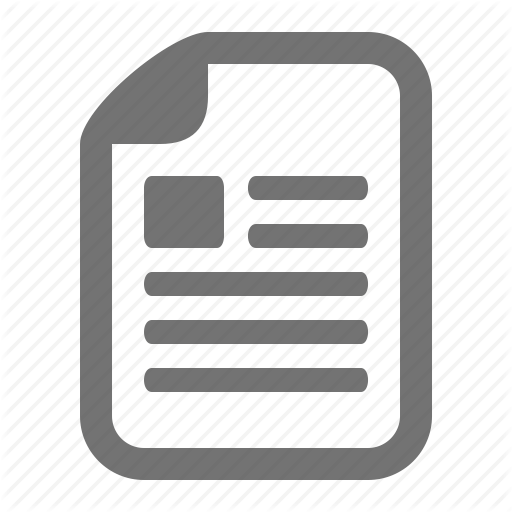
Proceedings of 2014 International Conference on Modelling, Identification and Control, Melbourne, Aus tralia, December 3-5, 2014 8 ��--�----�r=�==�====�==�== � ...... TCP-like data-driven strategy - UDP-like data-driven strategy 7 --e- Random transmission strategy - - - Periodic time-driven strategy
and covariance
6
,� iIi
1
Let � be an i.i.d. random variable with the probability density function f3 (10) f�(x) (3x -l , x E (0,1 ] , (3 >
5
O.
rv
4
,§
{ O,1,
Consider another random variable v:
v
2
Y
lE[P;]
IV.
Pr(v
0) 1
=
J
b) mean
S I MU L AT ION RESULT S
Consider the system model with parameters A 0.95,C 1, Q 1, R 1 . To see the better tradeoff between esti mation performance and communication rate provided by our proposed strategies (in this case we set (3 1), we use four different sensor scheduling strategies for remote estimation and the comparison results are shown in Fig. 2. Under the random transmission strategy,the sensor randomly transmits the data packets with probability equivalent to the data rate. Under the periodic time-driven strategy,the sensor sends the data packets every t time steps where the rate is t. We can clearly observe that higher communication rate renders better estimation performance. The TCP-Iike data driven strategy performs better than the UDP-Iike data driven one since the sensor receives more estimation information to help improve the estimation quality. Both strategies take an advantage over the other two strategies in terms of estimation error covariance under the same communication constraint. =
exp(-t y'Yy) ; exp(-2Y'YY).
]
[
=
1 _, (� + -1y-1 -1) y exp -"2Y yy (3 det(I + (3�yyY) 0 is Gaussian distributed x,y conditioned on v
under four scheduling strategies versus communi
=
if � :s; if � >
Then the following facts are true. a)
OL-�____L-__-L____�__�____ �__�L-__� 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Fig. 2. limk-+oo cation rate 'Y
=
=
=
[a b]', where a x -"-'xy( "-'yy + (3-1y-1) -1-y, b (I + (3�yyy) -l y, =
=
-
"
(11) with
"
=
=
V.
�, where � x �Xy � ��Xy �yy , �xx �xx -�xy(�yy + (3-1y-1) -1��y, �xy �xy(I + (3�yyY) -l , �yy (�;i + (3y) -l .
and covariance
=
=
Proof: a) Let us compute the probability of v
Pr(v =
=
CONCLUSION
In order to prove the main theorems,we need to prove the following lemma. Lemma 6.1: Consider x E IRn, y E IRm be jointly Gaussian distributed with mean
lE[x]
=
x,
lE[y]
=
=
1
1
00
00
J
1
-
00
exp
J
-� (3y'Yy) dy
1
00
1
lE[exp(-"2(3y'Yy)]
1 exp( -"2 (y -y-) ' �-1 yy
det(�yy)(27r) m
(y - y)) exp(
=
=
O.
=
0)
1 Pr(� :s; exp(-"2Y'YY)) -
ApPENDIX
]
=
In this paper we study the data-driven remote state esti mation problem for NCSs to meet the communication rate constraint. We exploit the online information to propose two data-driven sensor scheduling strategies for two cases, i.e., with and without information feedback from estimator and present the corresponding Kalman-like filter. The advantages are twofold: the first one is the better tradeoff between estima tion performance and communication resources than the offline strategies; the other one is the computational simplicity. Future work lies in distributed data-driven estimation and optimal filtering under secure c Olmnunication. V I.
[
=
det(�yy)(27r) m
·
[ � (y -((3�yyY -
+
1
I) -l y) ' (�;
i
+
(3Y)(y-
((3�yyY + I) -l y) - "2Y'(�yy + (3-1y-1) -1 Yl dy
[
1
1
]
exp -"2Y_, (�yy + (3-1y-1) -1-y - Jdet(I + (3� yyY)
_
O.
b) To prove b),we first compute the cumulative probability distribution of x,y conditioned on v For any two Borel measurable sets 5 1 � IRn, 52�Rm:
Y
=
Pr(x E 5 1,y E 521v 0) � Pr(x E 51,Y E 52, � :s; exp(- y'Yy)) Pr(v 0) =
=
200
Proceedings of 2014 International Conference on Modelling, Identification and Control, Melbourne, Australia, December 3-5, 2014
1 j' j' J 1 ' Pr(v = 0) XESI yES2 det(�)(2Jr) m+n -::) . y' y' ) �-1 ( y-y exp [ -! (x' 2 - � (x' y') (� jj� ) ( � )] dydx 1 ' 1 j' j' = Pr(v = 0) XESI yES2 Jdet(�)(2Jr) m+n 1 Sxy ) . exp [ - - (x' -a' y' b') ( Sxx 2 S�y Syy + jjY (x -a) 1] y b -2c dydx
RE FERENCES
=
- x'
[ 1] R. M. Murray, K. J. Astrom, S. P. Boyd, R. w. Brockett, and G. Stein, "Future directions in control in an information-rich world," Control Systems, IEEE, vol. 23, no. 2, pp. 20-33, 2003. [2] J. Hespanha, P. Naghshtabrizi, and Y. Xu, "A survey of recent results in networked control systems," Proceedings of the IEEE, vol. 95, no. I, pp. 138-162, 2007. [3] w. Zhang, M. S. Branicky, and S. M. Phillips, "Stability of networked control systems," Control Systems, IEEE, vol. 2 1,no. 1,pp. 84-99,200l. [4] B. Sinopoli, L. Schenato, M. Franceschetti, K. Poolla, M. I. Jordan, and S. S. Sastry, "Kalman filtering with intermittent observations," IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1453-1464,2004. [5] Y. Mo and B. Sinopoli, "Secure control against replay attacks," in
X
_
Communication, Control, and Computing, 2009. Allerton 2009. 47th
_
IEEE, 2009, pp. 9 1 1-918. [6] A. Ribeiro and G. B. Giannakis, "Bandwidth-constrained distributed estimation for wireless sensor networks-part i: Gaussian case," IEEE Transactions on Signal Processing, vol. 54, no. 3, pp. 1 13 1- 1 143,2006. [7] B. Anderson and J. Moore, Optimal Filtering. Prentice Hall, 1979. [8] T. Kailath, A. H. Sayed, and B. Hassibi, Linear estimation. Prentice Hall, 2000. [9] L. Shi and L. Xie, "Optimal sensor power scheduling for state estima tion of gauss-markov systems over a packet-dropping network," IEEE Transactions on Signal Processing, vol. 60, no. 5, pp. 2701-2705, 20 12. [ 10] D. Han, Y. Mo, 1. Wu, B. Sinopoli, and L. Shi, "Stochastic event triggered sensor scheduling for remote state estimation," in Decision and Control (CDC), 2013 IEEE 52nd Annual Conference on. [EEE, 20 13, pp. 6079-6084. [II] S. Trimpe and R. D' Andrea, "Reduced communication state estimation for control of an unstable networked control system," in Proceedings Annual Allerton Conference on.
_
=
; l ES 1 exp [-� (x' -a' y'
-r:= =; =:= =:= ES2 Jdet(� (=:=2= Jr:=) m=:+=n
1
where
[
( 00
_
b') �-1
(
-a y-b X
)] dydx,
1 0 jjY det(�) det(�) = , det(I + jj�yyY) � � ) �-l = s�x Sxy ,� = �xx �xy , yy �y Sxy Syy
� = �-1 +
(
)
)r
of IEEE Conference on Decision and Control and European Control Conference, 20 1 1, pp. 2361-2368. [ 12] R. CogiU, S. LaU, and J. P. Hespanha, "A constant factor approxima tion algorithm for event-based sampling," in Proceedings of American Control Conference, 2007, pp. 305-31l. [ 13] c. Yang and L. Shi, "Deterministic sensor data scheduling under limited communication resource," IEEE Transactions on Signal Processing, vol. 59, no. 10, pp. 5050-5056, 20 1 1. [ 14] O. C. [mer and T. Basar, "Optimal estimation with limited measure ments," in Decision and Control, 2005 and 2005 European Control Conference. CDC-ECC'05. 44th IEEE Conference on, 2005, pp. 10291034. [I5] J. Wu, Q. Jia, K. Johansson, and L. Shi, "Event-based sensor data scheduling: Trade-off between communication rate and estimation qual ity," IEEE Transactions on Automatic Control, vol. 58, no. 4, pp. 10411046, 2013.
(
"xy(" L..yy + pf-/-1y-1) -1a = -x -L.. y, b = (I + jj�yyy) -l y, -1y-1) -l y. C = y'(�yy + jj By matrix inversion lemma,the following equality holds:
� \ �xx = (Sxx -SXyS;;yl S y) � \ �yy = (Syy -SXyS;;Xl S y) � Sxx�xy + Sxy�yy = S y�xx + Syy��y = Therefore,
O.
� �yy = (Syy + jjY -�;;i -SXyS;;X1 S y) -1 i = (�;; + jjy) -l . Moreover,we have
which implies that
; �xy = -S;; SXy�yy = �xy(I + jj�yyy) -l .
Finally,
� � �xx = S;;xl + S;;X1SXY ( Syy + jjY -S yS;;Xl SXy) -l S yS;;Xl = �xx -�xy(�yy + jj-l y-l ) -l ��y.
Thus the pdf of x and y conditioned on which completes the proof.
N([a bJ', �),
v
0
is •
201











































![Defining and Visualizing DataDriven Personas - WordPress.com [PDF]](https://m.moam.info/img/260x300/defining-and-visualizing-datadriven-personas-wordp_6479c223098a9e47158b45b1.jpg)