European Congress on Computational Methods in Applied Sciences and Engineering ECCOMAS 2004 P. Neittaanm¨ aki, T. Rossi, S. Korotov, E. O˜ nate, J. P´ eriaux, and D. Kn¨ orzer (eds.) Jyv¨ askyl¨ a, 24–28 July 2004
DESIGN OF GAS TURBINE ENGINES USING CFD Leigh Lapworth? and Shahrokh Shahpar? ? Aerothermal Methods Group Rolls-Royce plc, P.O.Box 31, Derby, DE24 8BJ, England e-mails:
[email protected],
[email protected] web page: http://www.rolls-royce.com
Key words: Turbomachinery, Design, Optimisation, Adjoint. Abstract. This paper describes a general purpose design system being developed at RollsRoyce plc. The key elements of the system are a parametric design and rapid meshing capability; a state-of-the-art CFD solver with an adjoint capability; and, an advanced optimisation system consisting of a library of optimisers. A description is given of each element in the design system. To illustrate its use and flexibility, five different applications of the system to a gas turbine are described. These are: optimisation of the guide vanes in the bypass duct to minimise excitation of the fan rotor; the same bypass guide vane optimisation using sensitivity gradients from the adjoint solver; optimisation of a compressor stage to improve efficiency whilst constraining flow rate, pressure ratio and outlet flow angle; minimisation of the forced excitation of a turbine rotor by modifying the wake of the upstream nozzle guide vane; and, optimisation of a fan rotor to reduce tone noise.
1
Leigh Lapworth and Shahrokh Shahpar
1
INTRODUCTION
The design of individual gas turbine components using CFD is now commonplace [1]. Traditional design by analysis methods are increasingly being supplemented with automated design systems [2] and the use of optimisation systems [3]. At the same time, fluid machinery can now be modelled and analysed to an unprecedented level using CFD on powerful multi-processor computers or clusters. Although CFD can provide essential information to aid the physical understanding of complicated flow fields, it is generally the requirement to design/modify geometry that drives the application of CFD. When applied to an individual component, the physical understanding gained from CFD is often able to guide design improvements to that component. However, fluid machinery is generally characterised by the interaction of a number of components, such as multistage turbomachinery; the intake and the fan rotor; the combustor and the upstream diffuser; and, so on. A truly optimal design can only be achieved by accounting for all the component interactions. It is here that the design by analysis approach becomes limited - a designer may know how he/she would like to change the flow field, but changing the geometry to achieve that is much less intuitive than in single component design. If the requirement to meet a number of constraints is added, then design by analysis becomes a very crude tool. This paper describes an automated design system that has been developed specifically with multi-component fluid machinery in mind. Section 2 describes the main elements of the design system. Section 3 describes five novel applications of the system. 2
ELEMENTS OF THE DESIGN SYSTEM The design systems consists of the following processes: • Parametric representation • Geometry construction • Mesh generation • CFD solution • Data extraction and functional evaluation • Optimisation
The systems that implement these processes are described in the following sections. An underlying theme of all the systems is that they have a batch execution mode that allows them to be run automatically by the optimiser.
2
Leigh Lapworth and Shahrokh Shahpar
2.1
Parametric representation
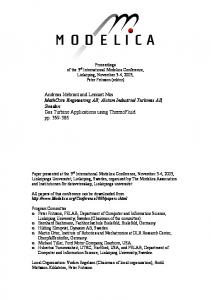
Although the parametric representation, geometry construction and mesh generation are logically separate processes, they are intimately linked with the objective of creating a CFD mesh in the shortest possible time. With this in mind, an integrated design system has been developed [4] called PADRAM (Parametric Design and Rapid Meshing System) which provides a very efficient and robust system for parametric geometry and mesh creation. The parametrisation follows the strategy successfully adopted in previous work [2] of using parameters that are already familiar to the designer. In the context of turbomachinery blades, the parameters include: lean, sweep, stagger, inlet and outlet blade angles, camber distribution and thickness distribution. The parameters can be independently specified at a number of radial heights to produce a complete 3D design space. For multi-passage and/or multi-stage turbomachinery applications, the parameters can be independently specified for every blade in the calculation domain. Figure 1 illustrates how a single blade within a ring of blades can be designed independently of the other blades in the ring. For multipassage simulations, both the pitch and the relative axial position between adjacent blades are also design parameters.
Figure 1: Independent design of a single blade within a ring.
The philosophy of using familiar engineering parameters has been extended into other application areas. For example, the design system for nacelles uses parameters such as droop angle, scarf angle, highlight radius and intake duct area ratio. 2.2
Geometry construction
For constructing the geometry of turbomachinery blades, the approach taken is, typically, one of perturbing an existing base geometry. The blade geometry may be defined 3
Leigh Lapworth and Shahrokh Shahpar
using either a number of pre-defined blade-to-blade stream sections spanning the blade from hub to tip; or, as a single three-dimensional NURBS entity. If a NURBS entity is used then PADRAM creates its own set of pseudo stream sections on which to generate the CFD mesh. Since both the geometry and the meshes are constructed stream surfaces, an important aspect of the design system is definition of these surfaces in three-dimensional space. In PADRAM, the stream surfaces are defined in polar coordinates as Si (r, θ, z), where i is the section index. Using non-dimensional parametric coordinates, m0 and θ, a typical surface can be defined as: rs = r(m, θ) θs = θ(m, θ) zs = z(m, θ) where, for axi-symmetric stream surfaces: Zz √ 2 dr + dz 2 0 m = r(z) z
(1)
(2)
0
r = r(z) z0 is an arbitrary reference and m0 is the non-dimensional distance along a stream section which will be zero at z0 . PADRAM starts by transforming the stream sections into parametric two-dimensional planes, using the co-ordinates θ and m0 . As r is greater than zero for all z coordinates, m0 is a monotonic function of z, hence a unique inverse function exists to map the computational coordinates back to the physical, three-dimensional polar coordinates. The advantage of the above transformation is that the angles are preserved and the mesh-generation procedure deals with plane sections only. For non-turbomachinery geometries, PADRAM interfaces to CAD through IGES files. PADRAM uses a library of stylised geometries, so that it has a number of pre-defined rules for cleaning IGES files and constructing geometry. 2.3
Mesh generation
The PADRAM mesh generator can, very rapidly, produce good-quality viscous meshes for multi-passage, multi-stage turbomachinery using 2D, quasi-3D or full 3D blade geometry. PADRAM makes uses of both transfinite interpolation and elliptic grid generators to generate hybrid C-O-H meshes [4]. An orthogonal body-fitted O-mesh is used to capture the viscous region in the vicinity of the blade(s). A C-mesh is used for any bifurcations in the domain, such as pylons and drive farings in bypass duct applications. Elsewhere H-meshes are used to patch adjacent blocks of O- or C- mesh together; and, to extend the 4
Leigh Lapworth and Shahrokh Shahpar
mesh to meet the upstream, downstream and periodic boundaries. The mesh is independently generated for every stream section, hence three-dimensional meshes are produced easily from stacked two-dimensional meshes with no mapping required to transfer the meshes radially. This avoids mesh morphing, and ensures that good quality meshes are created at every height even if the geometry varies considerably from hub to tip. For blades with tip gaps, a separate H-mesh is generated in the gap. Mesh generation is extremely fast, requiring no more than a few seconds to generate a single passage 3D mesh. A mesh of several million nodes can be generated in approximately one minute on a 3.0GHz PC. A typical PADRAM mesh for a single blade passage is shown in figure 2(a).
(a) Single blade mesh
(b) Bypass duct mesh
Figure 2: PADRAM meshes for single and multi-passage applications.
As stated above, one of the key features of PADRAM is the fact that it is intimately linked with the parametric geometry definition. For example, within a ring of bypass guide vanes, the geometry of each vane can be specified independently of the others either by using a different geometry definition file or by using one of the several design parameters within PADRAM. Another important feature of PADRAM is that it is a true multi-passage meshing system. The geometry of each blade in the annulus can be varied independently and a good viscous mesh for the complete ring of blades can be generated in one step. Figure 2(b) shows a PADRAM mesh for a bypass assembly consisting of 52 guide vanes (each defined independently of the others) a pylon and a radial drive faring. 2.4
CFD solution
CFD solutions are generated using the Rolls-Royce plc. HYDRA-CFD code. HYDRACFD is a suite of non-linear, linear and adjoint solvers being developed collaboratively by Rolls-Royce plc. and its University partners [5]. HYDRA-CFD is a general purpose code for hybrid unstructured meshes which uses an 5
Leigh Lapworth and Shahrokh Shahpar
efficient edge-based data structure [6]. The multi-block PADRAM meshes are converted into this data structure using a pre-processor. The flow equations are integrated around median- dual control volumes using a MUSCL based flux-differencing algorithm. The discrete flow equations are predconditioned using a block Jacobi preconditioner [7] and iterated towards steady state using the 5-stage Runge-Kutta scheme [8]. Convergence to steady state is further accelerated through the use of an element-collapsing multigrid algorithm [9]. The flow solver runs in parallel on both shared and distributed memory machines using domain decomposition. The parallel multigrid capabilities are essential for generating CFD solutions in the elapsed time needed for effective use of optimisation. The HYDRA-CFD framework is novel in the fact that it has linearised unsteady [10] and adjoint solvers [11] built on top of the non-linear solver. The linear and adjoint solvers represent a full linearisation of the turbulent steady flow equations. Examples of the use of both the linear and adjoint solvers within an optimisation process are described in this paper. 2.5
Data extraction and function evaluation
In order to drive the optimisation process, the values of both cost and constraint functions must be extracted from the CFD solution. The key element here is that the design system must be able to extract these values as a batch process. Typically, design functionals involve integrations over boundary planes. These integrals may be over the entire boundary plane, as in the case of inlet or outlet flow rate; or, in the circumferential direction at a series of radial positions, as in the case of prescribed inlet or outlet profiles. Two approaches to data extraction have been adopted. The first is to export the HYDRA-CFD solution into a multi-block PLOT3D flow file - this is only possible for multiblock meshes and relies on a stored mapping generated by the HYDRA-CFD preprocessor. Once the flow solution is in PLOT3D format, data can be extracted using a range of structured mesh post-processors. The second approach is to process the unstructured mesh directly - this relies on constructing a series of interpolating lines in the circumferential direction which overlay the unstructured mesh. 2.6
Optimisation
Optimisation is performed using the SOFT (Smart Optimisation For Turbomachinery) system [3] being developed by Rolls-Royce plc. and its university partners. SOFT provides a library of different optimisers; design of experiments techniques; statistical analysis of variations; and, advanced response surface models. It is well known that no single optimisation technique performs better than others across a range of engineering applications. Hence, SOFT provides a library of optimisers which fall into four broad categories: • Explorative methods, such as Simplex based methods.
6
Leigh Lapworth and Shahrokh Shahpar
• Gradient based methods, such as the Modified Feasible Descent and Sequential Quadratic Programming techniques which are used in this paper. • Evolutionary type methods, such as the Simulated Annealing technique used in this paper. • Hybrid methods, such as Tabu search which combine elements of the previous methods. An issue that must often be addressed with CFD based optimisation is the run-time associated with the performing a simulation. With access to a compute cluster, this can be addressed through the parallel capabilities in the flow solver. In addition, SOFT provides a number of approximation techniques for reducing the number of expensive CFD simulations which must be performed [3]. The SOFT system provides the user with a graphical interface for constructing the work flow, such as the one shown in figure 5, which defines the sequence of operations from the setting of design parameters to the evaluation of the cost and constraint functions. The GUI also provides a visualisation capability for plotting the progress of the optimisation. 2.7
Adjoint CFD
Consider an objective function I(U, α) which is a function of the flow variables U and a set of design parameters α. The sensitivity of the cost function to the design variables is: dI ∂I ∂Uk ∂I = + (3) dαj ∂Uk ∂αj ∂α j Using the fact that the flow variables satisfy the Navier-Stokes euqations R(U, α) = 0 and introducing the adjoint variables, v, viT
∂I = ∂Uk
Ã
∂Ri ∂Uk
!−1
(4)
equation 3 can be rewritten as: dI ∂Ri ∂I = −viT + dαj ∂αj ∂αj
(5)
Equation 4 can be re-written to give the adjoint equation Ã
∂R ∂U
!T
Ã
v=
∂I ∂U
!T
(6)
The advantage of the adjoint equation is that it depends only on the cost function I and not on the design parameters α. Hence, for applications where there are many design variables but only one, or a small number, of cost and constraint functions the adjoint approach is a computationally efficient approach for computing design sensitivities. 7
Leigh Lapworth and Shahrokh Shahpar
3
DESIGN APPLICATIONS
In order to demonstrate the flexibility of the design system, the following applications are presented: • Optimisation of bypass guide vanes using steady state CFD, • Optimisation of bypass guide vanes using adjoint CFD, • Optimisation of a compressor stage using multi-stage CFD, • Reduction of turbine forced response using linear unsteady CFD, • Reduction of fan rotor noise using steady state CFD. These applications make use of a range of capabilities from both the CFD solver and the optmisation library. The use of both approximation techniques and PC clusters to make the CFD simulation times tractable for the optimiser is also demonstrated. 3.1
Optimisation of bypass duct guide vanes
The layout of a modern high bypass ratio gas turbine engine is shown in figure 3(a). Within the bypass duct there are large scale blockages due to the pylon (which attaches the engine to the wing) and the faring around the radial drive shaft (RDS). Upstream of these blockages is a ring of outlet guide vanes (OGVs) which remove the swirl from the flow leaving the fan rotor, see figure 3(b). It is has been shown [12] that the pylon and RDS generate a circumferential distortion in the static pressure field which can propagate upstream, through the bypass OGVs, and excite the fan rotor. It has also been shown in [12] that by circumferentially varying the OGV geometry the level of pressure distortion reaching the fan, and hence its excitation, can be drastically reduced. Theoretically, the distortion reaching the fan can be completely eliminated if every OGV is allowed to be different. However, this is not a cost-effective solution and design options include: a single OGV with a variable stagger pattern; and, a small number, typically 3 or 5, of different OGVs arranged in blocks around the annulus. The PADRAM-HYDRA-SOFT system has been applied to the design of a ring of 52 bypass OGVs to reduce fan forcing. In this example, all 52 OGVs are identical but their stagger, or setting, angle is allowed to vary around the annulus up to a user specified maximum value. Notionally, each OGV stagger angle is independent of the others and the design space has 52 degrees of freedom. In practice, the stagger angle should vary more smoothly around the annulus its circumferential distribution can be represented by a Fourier series of the form: ζi = A0 +
M · X
Aj sin
j=1
µ
¶
µ
2πi 2πi j + Bj cos j N N 8
¶¸
(i=1,N)
(7)
Leigh Lapworth and Shahrokh Shahpar
(a) Layout of a high bypass ratio gas turbine engine.
(b) CFD solution for bypass duct.
Figure 3: Engine cut-away and bypass duct components: OGVs, pylon and radial drive faring.
where ζi is the stagger angle of the ith OGV; N is the number of OGVs; and, M is the number of harmonics used in the Fourier expansion. In the current calculations, seven Fourier harmonics have been used, leading to a design space with 15 parameters (A0 , A1 , B1 , . . . , A7 , B7 ). In order to ensure that the all the stagger angles are less than the user specified constraint, ζconst ≥ 0, the stagger angles from equation 7 are modified by: ζi =
ζi ζmax
min (ζmax , ζconst )
(8)
where ζmax = maxi=1,N (|ζi |) is the maximum, unmodified, stagger angle. The objective function, I, for the design is the root mean square of the deviation in static pressure from a uniform value at the inlet to the bypass duct:
I= where p¯ =
1 N
N P i=1
v uP u N u (p − p¯)2 t i=1 i
N
(9)
pi is the mean inlet static pressure, with N the number of mesh
nodes on the inlet boundary. Hence, I = 0 corresponds to a completely uniform pressure downstream of the fan rotor and, therefore, a zero excitation. Using SOFT, the OGV stagger pattern has been optimised using the dynamic hill climbing (DHC) approach. Two constraint values, ζconst were used: 3◦ and 6.43◦ . Figure 4(a) shows the convergence of the optimiser in the case when the stagger variation is limited to ±3◦ . Figure 4(b) shows the variation in static pressure around the circumference at the inlet to the bypass duct. With uniform OGVs there is a peak to 9
Leigh Lapworth and Shahrokh Shahpar
!
"
#
$
%
" "
#
$
%
" "
&
" &
"
θ
(a) Convergence of the optimiser.
(b) Pressure variation at OGV inlet.
Figure 4: Optimisation of bypass OGV stagger variation.
trough variation in static pressure of approximately 6kPa. With the stagger variation limited to ±3◦ , the optimiser achieves a 57% reduction in the objective function. With the stagger variation limited to ±6.43◦ , a reduction of 85% is achieved. 3.2
Bypass OGV optimisation using adjoint CFD
The bypass OGV optimisation described in 3.1 is an example where the number of design parameters is significantly larger than the number of cost and constraint functions. In fact, the constraints apply directly to the design parameters and do not require the evaluation of an auxiliary equation. This is precisely the situation where the use of adjoint CFD, as described in section 2.7, should perform well. This section demonstrates the adjoint capabilities of the PADRAM-HYDRA-SOFT system using the same bypass OGV case as used in 3.1. In order to utilise adjoint CFD, the chosen optimiser must be one that is able to use gradient information effectively. In this example, the Sequential Quadratic Programming (SQP) technique is used. This is well suited to the use of adjoint CFD since it uses a pre-defined sequence of perturbations to each design parameter in turn, in order to build an approximation to the Hessian matrix of second derivatives. The Hessian matrix is then used to compute a new, more optimal, point in the design space. When using adjoint CFD, one factor that must be addressed is that only first order sensitivity gradients are computed. In a design space that is highly non-linear, the adjoint gradients must be coupled with a procedure for re-evaluating the base and adjoint flow fields at regular intervals in the optimisation cycle. The decision of whether to use the existing adjoint gradients or recompute the steady and adjoint flow fields is based on a simple Euclidean distance test: v uN ³ ´2 uX dα = t αi − αiold i=1
10
(10)
Leigh Lapworth and Shahrokh Shahpar
where, in this instance, N is the number of design parameters, αi . When the Euclidean distance is smaller than a user specified threshold, e.g. 0.01, the adjoint sensitivity gradients are used to compute the new value of the objective function; otherwise, the objective function is computed from a new non-linear steady flow solution along with a new adjoint solution. Figure 5 shows the work flow for the optimisation of bypass OGVs using adjoint CFD. The modules setadj and rhslin are part of the HYDRA-CFD suite which compute the adjoint boundary conditions and flow residuals on a perturbed mesh respectively. !
& & α' α
& & ( ξ) !
!
# "
"
# #
$ #
"
$
#
"
#
%
" "
Figure 5: Flow chart for adjoint optimisation
In this example, the maximum stagger variation is limited to ±3◦ . Figure 6(a) shows the convergence of the SQP optimiser, and figure 6(a) shows the solution after 280 design cycles which achieves a reduction of 38% in the objective function. Comparing the convergence paths of the DHC (figure 4) and the SQP (figure 6) optimisers, it is seen that the SQP optimiser consists of a series of plateaux. Each plateau consists of the series of perturbations to each design parameter - it is these sensitivities that are computed using the adjoint solution. Once all the perturbations have been evaluated, the Hessien matrix is assembled and the optimiser moves to a new point in the design space. At this point, a new steady state solution is evaluated and if the Euclidean distance threshold has been exceeded a new adjoint solution is also computed. Hence, in the 280 iterations of the optimiser shown in figure 6 there are only 16 steady and adjoint CFD simulations. Whereas, the 206 iterations shown in figure 4 each require a steady CFD solution. The convergence of the adjoint SQP optimisation (figure 6) shows a number of overshoots in the latter stages of the convergence. These are due to the fact that part converged steady and adjoint solutions were being used. This practice has been used successfully in non-linear optimisation [13] - as the optimiser converges toward the optimum, the 11
Leigh Lapworth and Shahrokh Shahpar
! " # !
(a) Convergence of the optimiser.
$
(b) Pressure variation at OGV inlet.
Figure 6: Optimisation of bypass OGV stagger variation using adjoint CFD.
convergence of the steady CFD becomes tighter because the solution from the previous optimisation step is used as an initial guess. This practice appears to be less successful when using adjoint CFD because the part convergence can lead to one or more poor sensitivity gradients which are propagated forward to the next adjoint solution. This also explains why the adjoint optimisation does not achieve as large a reduction in the cost function as the non-linear approach. Further research is ongoing to understand how best to use adjoint sensitivity gradients within a computationally efficient optimisation scheme. 3.3
Optimisation of a compressor stage
Modern axial flow compressors consist of many stages of closely coupled blade rows which must be modelled using multistage CFD techniques to obtain accurate performance predictions. Similarly, design/optimisation of each blade row in turn is generally overconstrained by the need to maintain the matching with the adjacent rows. More optimum designs are, clearly, possible if the compressor is designed in its entirety as a multi-stage machine. The capability of the PADRAM-HYDRA-SOFT system to design multistage compressors is demonstrated in this section. The example chosen is that of designing the 3rd stage of a 4-stage low speed compressor rig. The datum stage is shown in figure 7. The rotor 3 inlet Mach number is approximately 0.2. The compressor is cantilevered with tip gaps of 1.18% span on the rotor and 1.12% span on the stator. There are 101 rotors and 134 stators and the calculation is run with a mixing plane between the rotor and stator. The design space consists of lean, sweep, stagger, and camber angle at the trailing edge. The same set of design parameters are used for both the rotor and stator but, otherwise, the rotor and stator designs are independent. The design parameters are specified via 12
Leigh Lapworth and Shahrokh Shahpar
Figure 7: Datum stage 3 of a 4 stage low-speed compressor.
control points at 0, 25, 50, 75 and 100% span on both the rotor and stator. A cubic spline is fitted through the control points to produce design perturbations at the intervening radii. In this example, the sweep, stagger and camber angles are not allowed to vary at either the hub or casing - this would allow existing fittings on the rig to be re-used. The lean angle is also fixed at the casing since this is invariant to any bulk circumferential offset. This reduces the design space to 26 independent parameters for the stage. The objective function is 1 − ηstage I= (11) 1 − ηbase with the constraint that ¯ ¯ ¯ ¯ ¯ ¯ ¯m ¯ ¯ Rnew − Rbase ¯ ¯¯ βnew − βbase ¯¯ ˙ − m ˙ new base ¯+¯ ¯+¯ 4 ¯¯ ¯≤² ¯ ¯ ¯ ¯ ¯
m ˙ base
Rbase
βbase
(12)
where m ˙ is the inlet flow rate; R is the stage pressure ratio; β is the stator exit flow angle; and, ² is a user defined threshold. By constraining the mass flow, pressure ratio and exit whirl angle the matching between the stage being designed and the other 3 stages should be maintained. The optimisation is performed using the Simulated Annealing optimiser within SOFT. Figure 8 shows the initial convergence of the optimiser together with snapshots of the design at three points in the convergence history. After running the optimiser for 400 iterations a 0.72% improvement in stage efficiency was achieved. 3.4
Minimisation of turbine forced response using linear unsteady CFD
Forced response is the excitation of one blade row by another due to a periodic forcing from either the wake from the upstream blade; or, the potential field from the downstream blade. With trends towards increased blade loading and reduced axial gaps between blade rows, the higher unsteady forces and hence vibratory stresses levels can lead to High Cycle Fatigue (HCF). A common approach to reducing forced response levels is the so called wake-shaping technique. The rationale is that if the vane wake is completely in phase when it reaches the rotor, the latter feels a large impulsive force at discrete instants in time. Whereas, if 13
Leigh Lapworth and Shahrokh Shahpar
Figure 8: Optimisation for stage efficiency
the vane wake is out of phase (i.e. leant circumferentially relative to the rotor), the force experienced by the rotor is distributed over a longer time interval and the peak forcing level, and hence likelihood of HCF, is lower. Leaning the vane wake can be achieved by restacking the stream sections defining the vane geometry. Since the vane, typically, has a high exit flow angle this is a very powerful design mechanism and the vane wake can be leant significantly with relatively small changes in stacking. The design objective is usually the HCF endurance limit, the evaluation of which is a 2 step process. In the first step, the unsteady forces, i.e. pressures, on the rotor are determined from a CFD simulation. In the second, a mechanical analysis of the rotor is performed to determine the forcing levels. The mechanical analysis uses a modal representation of the structure and solves an equation of the form: M x¨ + C x˙ + Kx = F1 sin(ωt + φ) + F2
(13)
where x is the displacement; M , C and K are the mass, damping and stiffness matrices respectively; F1 is the unsteady force from the CFD calculation at a frequency ω and an inter-blade phase angle φ; and, F2 contains any additional forces such as non-linear damping. The result of the mechanical analysis is the amplitude of the maximum displacement, usually at the rotor tip. This is fed into a database of material properties along with the steady and alternating stress levels on the rotor and the metal temperature to produce an estimate of the HCF endurance level. The evaluation of the unsteady rotor pressures requires an unsteady CFD simulation, which is expensive if a time-accurate calculation is used. Fortunately, time linearised unsteady CFD methods have proved a successful means of capturing the primary forcing mechanisms [14] and are computationally very efficient. Here, the unsteady flow in the 14
Leigh Lapworth and Shahrokh Shahpar
rotor is solved as a perturbation to its steady state flow field at a given frequency and interblade phase angle (defined by the numbers of rotors and vanes). The unsteadiness in the rotor is driven by the incoming wake. This is extracted from a steady CFD solution of the upstream vane at the axial position corresponding to the rotor inlet. At each radial height, the vane wake is decomposed into Fourier harmonics. The amplitude and phase of the harmonic of interest provide the inlet boundary conditions for the linear unsteady rotor calculation. The capability of the PADRAM-HYDRA-SOFT system to combine aerodynamic and mechanical analysis codes; and, to utilise advanced techniques such as linearised unsteady CFD is demonstrated in this section. The example chosen is that of designing a High Pressure (HP) turbine vane which minimises the HCF endurance level of the downstream HP rotor. More exactly, it is the HCF limit of the 2nd edge (2E) mode which is to be minimised; with the constraints that the HCF limits in the 1st torsion (1T) and 2nd flap (2F) modes should not increase. The design is broken into 2 phases: • Phase 1: Taking the wake amplitudes from the base vane, use the linear unsteady CFD solver to find the phasing, i.e. lean, of the wake which minimise the 2E HCF limit. • Phase 2: Taking the optimal phasing of the wake, use inverse design techniques to find the stack of the vane that delivers the required wake. The design space consists of perturbations to the phase of the wake from the base vane specified via control points at 0, 25, 50, 75 and 100% height. A cubic B-spline is fitted through the values at the control points to produce perturbations at the intervening radii. Since, the wake phase is invariant up to an additive constant, the phase perturbation at 0% height is set to zero. The phase perturbations are also normalised to lie within ±2π/N where N is the number of rotor blades. Hence, the wake can be leant by no more than one rotor pitch in either circumferential direction. 3.4.1
Phase 1
The evaluation of the cost and constraint functions consists of: perturbing the incoming wake according to the design parameters; generating the corresponding linear unsteady solution; performing the forced response analysis; and, computing the HCF endurance levels for the 2E, 1T and 2F modes. This example is also used to demonstrate the approximation techniques available in SOFT. The Response Surface Method (RSM) is used to construct an approximate model of the design space which can be used to provide function evaluations in lieu of the simulation codes. The RSM requires an initial population of simulations is order to construct
15
Leigh Lapworth and Shahrokh Shahpar
a first approximation to the response surface. The design parameters for the initial population are determined using the Taguchi Design of Experiments (DoE) technique. In this example, a three level Taguchi DoE was used which, for 4 design parameters, consists of 9 experiments. A further 10, manually prescribed, experiments were also performed. This gave a population of 20 simulations (including the initial design) from which the initial response surface was constructed. The RSM method proceeds by performing an optimisation using the response surface to evaluate the HCF levels rather than the simulation codes. Once an optimum has been obtained, a verification run of the simulation codes is performed using the optimum wake shape parameters. If the results of verification run are sufficiently close to the RSM value then the process has converged; otherwise, the new results are added to the RSM population and the response surface is updated. Structural mode 1st Torsion 2nd Flap 2nd Edge
Initial HCF level 0.39467 0.14444 10.91056
Minimum HCF level 0.0518 0.0636 1.7974
Redesigned Nozzle 0.07001 0.04815 4.68130
Table 1: Initial and optimum HCF endurance levels.
For this case, the optimisation is performed using the Simulated Annealing (SA) technique and a total of 12 verification simulations are needed for the RSM to converge. The 2nd and 3rd columns of table 1 show the initial and optimised HCF endurance levels for the three modes of interest The optimisation has not only achieved a reduction of 87% in the objective function it has also bettered the constraints with reductions of 83% and 56% reductions in the 1T and 2F modes.
Figure 9: Inverse designed nozzle giving required wake shape.
16
Leigh Lapworth and Shahrokh Shahpar
3.4.2
Phase 2
The inverse design of the nozzle to deliver the required wake shape follows the process described in [2]. The resulting nozzle is shown in figure 9. The HCF levels were recomputed using the wake from the redesigned nozzle and are shown in the 4th column of table 1. The rise in the 2E HCF level is due to the fact that the inverse design procedure is not able to deliver a new nozzle which gives exactly the desired wake shape. Also, it can be seen from figure 9 that the changes in the stack of the nozzle are somewhat extreme, particularly from the point of view of internal cooling passages. This was not imposed as a constraint in the design which is why such large reductions in the objective function were achieved. 3.5
Low noise fan design
In a modern high bypass ratio gas turbine engine, a significant amount of noise is generated by the fan rotor. The noise falls into 2 categories: tone noise which is generated at discrete frequencies and generally associated with blade row interactions and shocks; and, broadband noise which is generated over a broad spectrum and generally associated with boundary layers and turbulence phenomena. Tone noise is much more amenable to analysis by CFD and the steady and linearised unsteady solvers in HYDRA-CFD have been successfully applied to a number of tone noise test cases [15]. Indeed, there is sufficient confidence in the calculation of tone noise to consider using the optimisation to design components specifically to reduce noise levels. To demonstrate this, the PADRAMHYDRA-SOFT design system has been applied to the reduction of tone noise generated by a fan rotor.
Figure 10: High bypass ratio fan rotor with static pressure field and PADRAM generated mesh.
Figure 10 shows a typical high bypass ratio fan rotor along with its static pressure field 17
Leigh Lapworth and Shahrokh Shahpar
on the hub, casing and rotor surfaces. It is the strong shocks in outer part of the span, as seen in the casing surface pressures, which are the source of the noise. Figure 10 also shows a blade to blade section from the PADRAM mesh. This mesh has approximately 1.7 million nodes. This is much finer than would be needed for an aerodynamic optimisation and is needed to resolve the acoustics with a sufficient number of points per wavelength. The design space consists of sweep and lean of the rotor blade sections at 90% and 100% height. Below 80% the blade sections are unmodified. Between 80-90% and 90-100% the design parameters are linearly interpolated to the other sections. The objective function is the amplitude of the 1st radial harmonic of the tone at one blade passing frequency (1 BPF). The objective functions is evaluated one chord upstream of the fan leading edge and at aerodynamic conditions corresponding the fan working line. Multi-point simulations are used to ensure the optimisation is performed at a point on the working line.
Figure 11: Optimisation of fan rotor tone noise.
Figure 11 shows the convergence of SOFT using the dynamic hill climbing optimiser. The reduction in the amplitude of the first radial harmonic corresponds to a potential reduction in noise of approximately 9dB. In this case, the HYDRA-CFD calculations were run on a PC cluster. Each calculation used 60 processors and took approximately 2 hours elapsed time. Hence, the majority of the predicted reduction in the 1 BPF tone noise was achieved after 2 days of running the optimiser. 4
CONCLUSIONS
A new design system based around parametric design and mesh generation; and, advanced CFD and optimisation techniques has been presented. Five applications of the system have been presented which demonstrate the following, novel, attributes of the system: • A true multi-passage, multi-row design and meshing capability. 18
Leigh Lapworth and Shahrokh Shahpar
• The use of gradient sensitivities from adjoint CFD. • The simultaneous design of multiple components. • The coupling of aerodynamic and mechanical simulation codes. • The use of advanced CFD techniques, such as linearised unsteady methods. • The use of approximation techniques to supplement expensive CFD simulations • The effective use of parallel CFD and PC clusters to reduce CFD simulation times to an acceptable level. • The incorporation aerodynamic, aeromechanic and aeroacoustic design objectives. 5
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the permission of Rolls-Royce plc to publish this paper. We would also like to acknowledge the contribution of our colleague John Coupland to section 3.5; and, to Davide Giacche, Diego Benito and Piero Distefano for their contributions to sections 3.1, 3.2, 3.3 and 3.4.
19
Leigh Lapworth and Shahrokh Shahpar
REFERENCES [1] B.L. Lapworth. Challenges and Methodologies in the Design of Axial Flow Fans for High Bypass Ratio Gas Turbine Engines using Steady and Unsteady CFD. Advances of CFD in Fluid Machinery Design, Ed. Elder, Tourlidakis and Yates, Professional Engineering Publishing, 2002. [2] S.Shahpar and B.L. Lapworth. A Forward and Inverse Three-Dimensional Linear Design System for Turbomachinery Applications. 4th ECCOMAS Computational Fluid Dynamics Conference, Athens, 1998. [3] S.Shahpar. SOFT: A New Design and Optimisation Tool for Turbomachinery. Evolutionary Methods for Design, Optimisation and Control, Ed. Giannakoglou, Tsahalis, Periaux, Papailiou, Fogarty, CIMNE, Barcelona, 2002. [4] S.Shahpar and B.L. Lapworth. PADRAM: Paramtric Design and Rapid Meshing System for Turbomachinery Optimisation. Paper GT-2003-38698, ASME Turbo Expo, Atlanta Georgia, June 16-19, 2003. [5] B.L. Lapworth. Hydra-CFD: A Framework for Collaborative CFD Development International Conference on Scientific and Engineering Computation (IC-SEC), Singapore, June 30 - July 02, 2004. [6] P. Moinier, J.-D. M¨ uller and M.B. Giles. Edge-based multigrid and preconditioning for hybrid grids. AIAA Journal, Vol. 40, No 10, 2001. [7] P. Moinier and M.B. Giles. Preconditioned Euler and Navier-Stokes Calculations on Unstructured Grids. 6th ICFD Conference on Numerical Methods for Fluid Dynamics, Oxford, UK, 1998. [8] L. Martinelli. Calculations of Viscous Flows with a Multigrid Method. Ph.D Thesis, Dept. of Mech. And Aerospace Eng., Princeton University, USA, 1987. [9] J.-D. M¨ uller and M.B. Giles. Edge-Based Multigrid Schemes for Hybrid Grids. 6th ICFD Conference on Numerical Methods for Fluid Dynamics, Oxford, UK, 1998. [10] M.C. Duta, M.B. Giles and M.S. Campobasso. The harmonic adjoint approach to unsteady turbomachinery design. International Journal for Numerical Methods in Fluids, 40(3-4), p.323-332, 2002. [11] M.S. Campobasso, M.C. Duta, M.B. Giles. Adjoint Methods for Turbomachinery Design. Paper No. 1055, ISABE Conference, Bangalore, India, 2001. [12] A.B. Parry. Optimisation of bypass fan outlet guide vanes, Paper No. 96-GT-433, ASME Gas Turbine Conference, 1996. 20
Leigh Lapworth and Shahrokh Shahpar
[13] S. Shahpar, D. Giacche and B.L. Lapworth. Multi-objective Design and Optimisation of Bypass Outlet-guide Vanes. Paper GT2003-38700, ASME Turbo Expo, Atlanta Georgia, June 16-19, 2003. [14] J.G. Marshall and M.B. Giles. Some Applications of a Time Linearized Euler Method to Flutter and Forced Response in Turbomachinery. Unsteady Aerodynamics and Aeroelasticity of Turbomachines, edited by T.H.Fransson, Kluwer Academic, Dordrecht, NL, 1998. [15] A.G. Wilson. Application of CFD to Wake/Aerofoil Interaction Noise - A Flat Plate Validation Case. Paper AIAA-2001-2135, 7th AIAA/CEAS Aeroacoustics Conference, Maastricht, 28-30 May, 2001.
21