Design Principles for Adaptive Automation and Aiding B Y N ATA L I E B . S T E I N H A U S E R , D A V I N PA V L A S , & P. A . H A N C O C K
Research on adaptive automation has reached practical maturity, allowing the formation of several viable guidelines for its implementation.
A
daptive automation, which serves to dynamically allocate tasks between a system and its user, is a process that has reached sufficient maturity that we are able to begin to present viable design guidelines. With increasing levels of automation in society, the lessons learned in the past 30 years are growing more pertinent for modern systems implementation. In this article, we provide a brief examination of this history (see also Scerbo, 1996) and then introduce the major guidelines that have been proposed, based on the existing body of experimental research. Copyright 2009 by Human Factors and Ergonomics Society, Inc. All rights reserved. DOI 10.1518/106480409X435943
The Evolution of Adaptive Automation The idea of adaptive allocation of tasks in human-machine systems was first formally advocated in the early 1970s by W. B. Rouse and his colleagues, who were working to create an artificially intelligent decision-aiding system for U.S. Air Force pilots (also see Rouse, 1994). During testing, one pilot became impatient with the aiding system and began to deal with the situation himself. Because the pilot and the system were each trying to take control, and neither was communicating with the other, they both failed to resolve the problem. This led the researchers to suggest that what was needed was a form of cooperative intelligence. The human and the aiding system needed to complement, rather than compete with, each other. Ideally, the coordinated and interdependent efforts of human and machine would create a more effective system. FEATURE AT A GLANCE: Adaptive automation technologies and the associated research have advanced significantly since their inception in the early 1970s. Here, we present the history of this research and the lessons that have been learned from it. We also present several design guidelines for the successful implementation of adaptive automation in order to serve the community of designers who will be implementing adaptive automation. KEYWORDS: adaptive automation, adaptive aiding, design guidelines, dynamic allocation of tasks, human-machine systems
6
E
RGONOMICS
IN
D
ESIGN
•
SPRING
2009
The research that followed this initial suggestion focused on decision making that utilized “dynamic allocation of responsibility” (Rouse, 1975, p. 130). Basing the dynamic allocation policy on physiological and behavioral reflections of user state was first suggested by Hancock, Chignell, and Loewenthal (1985). A few years after Hancock et al.’s study, Parasuraman, Bahri, Deaton, Morrison, and Barnes (1990) recommended preliminary adaptive allocation design principles. For example, they recommended that the adaptation should be invoked using dynamic workload assessments and performance modeling.
The Process of Adaptive Allocation The dynamic allocation of tasks is what separates adaptive automation from pure automation. To be adaptive, an automated system cannot function in a simple “on-off” fashion but must feature a continuum of interaction that reflects degrees of human or machine control. In adaptive allocation, the demands of a task are apportioned dynamically to the component (human or machine) thought to be the most capable of performing the task (Hancock & Scallen, 1996). In the case of tasks in which humans excel (e.g., diffuse pattern recognition), it seems natural that they should be addressed by the operator. The system can still assist by transforming the task, making it even more amenable to human resolution. Indeed, a portion of the task may even be allocated to the machine; the transformation function is one example. The tasks that pose the highest risk of failure should be identified as the primary targets for dynamic allocation (Hancock & Scallen, 1996). It is not necessary for all components to be dynamically allocated at all times. For example, processes consisting purely of complex but algorithmic calcu-
lations (e.g., traffic collision avoidance) are prime candidates for permanent automation. After all, closed-ended, deterministic calculation is exactly what automation is for in the first place. However, when performance on any task is in the process of decline, the function of adaptive allocation is to prevent its eventual failure. The potential benefits of adaptive allocation are touted to include enhanced situation awareness, appropriate and tolerable levels of workload, consistent monitoring of the task, and decreased degradation of manual skills (Hancock & Scallen, 1996).
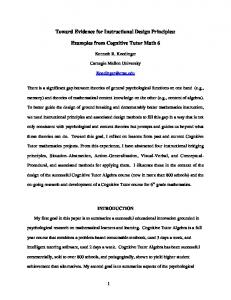
Guidelines for Adaptive Automation Drawing from the past three decades of research, it is possible to present a number of guidelines for the successful implementation of such context-contingent adaptive automation. Although it is useful to follow these rules, an optimal system may in fact utilize some or all of them, depending on specific operational conditions. Indeed, real-world constraints often force designers to make difficult choices and trade-offs. Judgment as to which guidelines to implement in a specific project is the responsibility of the individual designer. Nevertheless, each cited guideline arises from empirical studies over the years of adaptive automation research and should be considered carefully. The figure below illustrates the aspects we consider in our guidelines. G UIDELINE 1: Adaptive function allocation should be used intermittently. The complete automation of tasks may cause automation-related monitoring inefficiency (Parasuraman, Molloy, & Singh, 1993). In these circumstances, the operator exhibits reduced accuracy and/or speed of response in identifying any failures of the automated system. A study by Mouloua, Parasuraman, and Molloy (1993) found that the adaptive allocation of a task to the operator resulted in the enhanced performance of monitoring in subsequent tests. This monitoring performance benefit was observed with both model-based allocation (that is, allocation based on a model indicating that operator performance of that function is
Human Intervention
Individual Calibration
Task Partitioning
Intermittent Adaptive Allocation
Adaptive Automation
Environmental Context
Energetic Qualities
Emotional Requirements
Task Transformation
Important aspects to consider in adaptive automation for yielding an ideal design.
likely to be ineffective at that specific time) and performancebased allocation (allocation based on the operator’s poor monitoring performance in the past). More specifically, it was shown that only a brief return (10 minutes) of task responsibility to the human operator is required to ameliorate such automation-induced effects (Parasuraman, Mouloua, & Molloy, 1996). Following the return of task allocation to the automation, detection performance increased by about 66%, and this persisted for 10 to 20 minutes. Repeated episodes of function allocation also led to performance benefits over longer periods (Mouloua et al., 1993). Thus, adaptive function allocation can reduce automationrelated monitoring inefficiencies and help keep the operator in the loop by allocating tasks to the operators when their monitoring performance degrades or their performance model indicates that their response capacity is going to suffer in the near future.
The tasks that pose the highest risk of failure should be identified as the primary targets for dynamic allocation. There is, however, a caveat to the periodic return of control to the human operator. Tasks involving immediate, dynamic system control that interchanges control between the operator and the system too frequently can cause performance instabilities. For example, Scallen, Hancock, and Duley (1995) showed that when control oscillated between a pilot and an automated flight control system at a rate faster than 15-second intervals, overall system efficiency decreased. Thus, interpolated intervals of control are indeed recommended, but their absolute duration should be calibrated contingent on the nature of the task that is subject to reallocation. G UIDELINE 2: Energetic human qualities should be considered in design. Designers must consider the energetic qualities of human performance when designing adaptive automation systems. Especially in prolonged operations, human controllers become tired, distracted, or overloaded, and the purpose of adaptive automation is to remedy the resulting performance decrements. In doing so, it is necessary to consider these qualities instead of simply treating the symptoms. For example, how does an operator’s situation awareness factor into designing a system? How does one correct for distractions? Consideration of these human characteristics is essential in designing effective adaptive automation. Gains in performance through familiarity and skill development can be offset temporarily by increased fatigue resulting from time on task. Similarly, longer-term learning gains can be diminished by increasing levels of boredom as the individual works with the same system over a period of years (Csikszentmihalyi, 1990). The aforementioned examples of energetic dimensions of response are only a sample of the human operator’s energetic qualities that need to be considered. One potential solution to the issue of boredom, for example, is to provide augmented
SPRING
2009
•
E
RGONOMICS
IN
D
ESIGN
7
challenge in order to continuously tax the user’s faculties. Similar balancing strategies to counteract the deleterious effects of other fluctuations in energetic state have yet to be fully articulated. However, these efforts come under the general rubric of individuation, in which the conception is to customize the system to the characteristics of each individual user (see Hancock, 2003). G UIDELINE 3: Emotional requirements of the human operator must be considered. Although a human-machine automation pairing will ideally result in more effective work, the human in this system still must feel that his or her agency is meaningful. Specifically, feelings of personal security, worth in work, and a sense of control all factor into a human’s performance with an automated system (Hancock & Scallen, 1996). If humans feel unnecessary or that their input is constantly superseded, their motivation will suffer, and the quality of work they perform when tasks are assigned to them may drastically decrease.
It is important to know enough about the details of the environmental context to fully comprehend it and, especially, how it influences the human operator. Addressing these emotional requirements may also work to improve trust in the automated system as positive affect is generated (Lee & See, 2004). Trust may present a double-edged sword, however, as increasing levels of trust may lead to overuse and complacency instead of simply increasing acceptable system use. Nonetheless, trust in automation can be considered generally positive as long as care is taken to avoid the pitfalls of automation complacency. G UIDELINE 4: The system should be calibrated to the individual operating it. Maintaining a sense of selfworth and establishing trust in automation constitute an important first step, but optimal human-system interactions may require more: It may require adaptivity and individuation of the system to the characteristics of each specific operator. Specifically, according to the principles of hedonomics, in order for individuation (the highest rung on the ergonomics and hedonomics ladder) to occur, a system must permit the individual to adapt that system to his or her own personal traits, goals, and mood states over time as well as to personal habits, workload, and preferences (Hancock, Pepe, & Murphy, 2005). If a system can be tailored in this fashion, it can lead the operator to feel more enjoyment and pleasure when interacting with it. Poor design can create disastrous problems, but an enjoyable design can help people take pleasure in their work. When operators can customize their automation and have a feeling of control over the system, they demonstrate higher job satisfaction and work motivation (Fritzsche & Parrish, 2005).
8
E
RGONOMICS
IN
D
ESIGN
•
SPRING
2009
GUIDELINE 5: Task transformation should be used to simplify tasks for operators. When a task is allocated to the operator by the automated system, it should be simplified or supported to enable the operator to perform to the best of his or her abilities. Although the automation may not be carrying out the task, it should nonetheless provide modifications, alterations, or enhancements to the task or the task performance (Andes & Rouse, 1990). An exception exists when a task is being used to re-engage operators. In this case, a task should provide an optimum level of challenge, which may be indicated by the report of the operator’s state of “flow” (see Csikszentmihalyi, 1990; Hancock, in press). This would engender a state of complete focus and engagement on the operator’s part (Mouloua et al., 1993). When transforming a task, one must consider the human and the system not as discrete entities with specific strengths but as a dynamic pairing (a human-system team) that requires context-specific allocations (Dekker & Woods, 2002). G UIDELINE 6: The environmental context of the system should be used to determine allocation. The context (for example, the operational environment) in which automated performance occurs is an essential source of influence on the nature and implementation of automation (Hancock & Scallen, 1996). An automated system does not exist in a vacuum, and in a semiautomated system, environmental factors clearly influence the ability of either agent to perform. It is important to know enough about the details of the environmental context to fully comprehend it and, especially, how it influences the human operator. The environmental context should be taken into consideration when deciding when to allocate tasks and to whom the tasks should be allocated. The environmental variables that can or do cause performance degradations or increased task demands should be identified, and when these variables are present, dynamic allocation should be triggered (Hancock & Scallen, 1996). If, for example, the task environment becomes too stressful to the operator, it would be appropriate to turn the task over to the automation. Similarly, vibration, noise, or thermal extremes in the environment may necessitate changes to task allocation in order to account for any decrement they induce on the human operator. A pilot who is moving from simple air navigation to a combat situation will require an entirely different task allocation strategy based on the newly changed environment. G UIDELINE 7: Tasks should be partitioned when both the human and the system can contribute effectively. An aid can partition a task in order to share it with an operator. Tasks should be partitioned in response to current and impending situations (Rouse, 1994). The aid must constantly monitor system performance in order to be an effective tool. When a situation arises that would necessitate the sharing of responsibilities between the user and the system, the task should be split between the two. This sharing of tasks between the operator and the aid lends itself to positive aid-operator interactions (Andes & Rouse, 1990).
G UIDELINE 8: Adaptation should be controlled by the system but be open to human intervention when the system fails to recognize new conditions or demands. Rouse’s first law of adaptive aiding states, “there are conditions under which it is appropriate for computers to intervene and assume authority for task performance; in contrast there are no conditions under which it is appropriate for computers to unilaterally hand tasks to humans” (Rouse, 1994, p. 30). A recent study on the process of automation transition indicated that fatigue increases as the degree of system control increases (Hancock, 2007). Further, it was found that fatigue increased only when the system was in control and that it actually decreased when the human was in control of the function allocation decision.
An optimal system may utilize some or all of these guidelines, depending on specific operational conditions. However, results from that study also indicate that errors in a vigilance task occur much less frequently in system-controlled automation than in human-controlled adaptive automation. This trade-off of accuracy versus fatigue makes it harder to determine which agent should be placed in the role of the allocation controller. Given the importance of accuracy in automated systems, it becomes apparent that the system should allocate tasks to humans but that human intervention should be possible when the human becomes overfatigued. When a user has the feeling of control over the automation, it promotes a pleasurable interaction (Hancock et al., 2005). Thus, the system should allocate tasks in order to alleviate the managerial burden on the human operator, but the human should retain overall control in order to take advantage of the benefits of perceived autonomy.
Applying the Guidelines To demonstrate how these guidelines can be employed, the example of the Rotorcraft Pilot’s Associate (RPA) is useful. RPA is an adaptively automated decision support system for attack helicopter pilots (Dornheim, 1999). The system provides a number of planning tools that automate difficult tasks, such as determining what areas are visible to radar and what routes are most accessible. The design of RPA highlights a number of the adaptive automation guidelines presented in this article:
• • •
Guideline 3: RPA presents information to the user, but the user has the final say in what to do and can modify the plan or reject it as necessary. Guideline 4: RPA allows for modification to the presentation of information to best suit individual users. Guideline 5: Instead of requiring the user to analyze convergent factors and then develop plans, the RPA effectively focuses the user on the feasibility of the plan, thus making the user’s task simpler.
Design Guidelines for Implementing Adaptive Automation 1. Adaptive function allocation to the operator should be used intermittently. Intermittent allocation can improve performance in monitoring tasks. 2. Energetic human qualities should be considered in design. For example, degrees of challenge can be automatically adjusted with artificial tasks. 3. Emotional requirements of the human operator must be considered.The human operator should not feel unnecessary to the system as a whole. 4. The system should be calibrated to the individual operating it. Individual differences factor into the human operator portion of a human-system pairing and thus should be incorporated into the design. 5. Task transformation should be used to simplify tasks for operators. A task that is partitioned and transformed can be handled piecemeal instead of as a whole. 6. The environmental context of the system should be used to determine allocation. Environmental stressors such as heat, vibration, and gravitational force affect human performance and should be addressed. 7. Tasks should be partitioned when both the human and the system can contribute effectively. A true human-system collaboration operates as a pairing instead of a dichotomy of effort. Performance is improved when the most effective attributes of each part are employed. 8. Adaptation should be controlled by the system but be open to human intervention when the system fails to recognize new conditions or demands. In order to reduce task load on the human operator and improve general performance, the system should allocate tasks. To improve satisfaction and motivation, the human operator should retain control, or perceived control, of the system.
SPRING
2009
•
E
RGONOMICS
IN
D
ESIGN
9
•
Guideline 7: The overall combat task in which RPA assists represents a true human-system pairing. RPA presents information gathered from sensors, and the human determines whether the information and plans proposed by RPA are feasible and correct. RPA completes one task while the user completes the other.
This example is an existence proof and an important illustration that adaptive allocation has reached the level of maturity for widespread real-world implementation.
Conclusion The guidelines presented here were drawn from the empirical research that has defined the history of adaptive automation. The dynamic allocation of tasks has great potential for improving human-machine systems, but it must be performed carefully in order to ensure useful results. We have indicated a number of these guidelines, but new recommendations continue to emerge, such as the advocacy of multimodal displays for adaptation (see Tannen et al., 2000). Information and considerations provided by these respective guidelines can serve as a reference for engineers and scientists seeking to utilize the powerful adaptive automation paradigm. The guidelines are not meant to be an all-encompassing dogma of adaptive automation but, instead, a launching point for prospective designers. Each system must be considered in its own context and for its own requirements; individual systems need their own evaluations to ensure their practical effectiveness.
References Andes, R. C., & Rouse, W. B. (1990). Specification of adaptive aiding systems. In Proceedings of the IEEE International Conference (pp. 802–807). New York: Institute of Electrical and Electronics Engineers. Csikszentmihalyi, M. (1990). Flow: The psychology of optimal experience. New York: HarperCollins. Dekker, S. W. A., & Woods, D. D. (2002). MABA-MABA or abracadabra? Progress on human-automation co-ordination. Cognition, Technology, and Work, 4, 240–244. Dornheim, M. A. (1999). Apache tests power of new cockpit tool. Aviation Week and Space Technology, 151(16), 46–49. Fritzsche, B. A., & Parrish, T. J. (2005). Theories and research on job satisfaction. In S. D. Brown & R. W. Lent (Eds.), Career development and counseling: Putting theory and research to work (pp. 180–202). New York: Wiley. Hancock, P. A. (2003). Individuation: Not merely human-centered but person-specific design. In Proceedings of the Human Factors and Ergonomics Society 47th Annual Meeting (pp. 1085–1086). Santa Monica, CA: Human Factors and Ergonomics Society. Hancock, P. A. (2007). On the process of automation transition in multitask human-machine systems. IEEE Transactions on Systems, Man, and Cybernetics—Part A: Systems and Humans, 37, 586–598. Hancock, P. A. (in press). The battle for time in the brain. In J. A. Parker, P. A. Harris, & C. Steineck (Eds.), Time, limits and constraints. Leiden: Brill. Hancock, P. A., Chignell, M. H., & Loewenthal, A. (1985). An adaptive human-machine system. In Proceedings of the IEEE Conference on Systems, Man, and Cybernetics (pp. 627–630). New York: Institute of Electrical and Electronics Engineers. Hancock, P. A., Pepe, A. A., & Murphy, L. L. (2005). Hedonomics: The power of positive and pleasurable ergonomics. Ergonomics in Design, 13(1), 8–14.
Hancock, P. A., & Scallen, S. F. (1996). The future of function allocation. Ergonomics in Design, 4(4), 24–29. Lee, J. D., & See, K. A. (2004). Trust in automation: Designing for appropriate reliance. Human Factors, 46, 50–80. Mouloua, M., Parasuraman, R., & Molloy, R. (1993). Monitoring automation failures: Effects of single and multi-adaptive function allocation. In Proceedings of the Human Factors and Ergonomics Society 37th Annual Meeting (pp. 1–5). Santa Monica, CA: Human Factors and Ergonomics Society. Parasuraman, R., Bahri, T., Deaton, J., Morrison, J., & Barnes, M. (1990). Theory and design of adaptive automation in aviation systems (Progress Rep. No. NAWCADWAR-92033-60). Warminster, PA: Naval Air Warfare Center, Aircraft Division. Parasuraman, R., Molloy, R., & Singh, I. (1993). Performance consequences of automation-induced “complacency.” International Journal of Aviation Psychology, 3(1), 1–23. Parasuraman, R., Mouloua, M., & Molloy, R. (1996). Effects of adaptive task allocation on monitoring of automated systems. Human Factors, 38, 665–679. Rouse, W. B. (1975). Human interaction with an intelligent computer in multi-task situations. In Proceedings of the 11th Annual Conference on Manual Control (pp. 130–143). Moffett Field, CA: NASA. Rouse, W. B. (1994). Twenty years of adaptive aiding: Origins of the concept and lessons learned. In M. Mouloua & R. Parasuraman (Eds.), Human performance in automated systems: Current research and trends (pp. 28–32). Mahwah, NJ: Erlbaum. Scallen, S. F., Hancock, P. A., & Duley, J. A. (1995). Pilot performance and preference for short cycles of automation in adaptive function allocation. Applied Ergonomics, 26, 397–403. Scerbo, M. W. (1996). Theoretical perspectives on adapative automation. In R. Parasuraman & M. Mouloua (Eds.), Automation and human performance: Theory and applications (pp. 37–63). Mahwah, NJ: Erlbaum. Tannen, R. S., Nelson, W. T., Bolia, R. S., Haas, M. W., Hettinger, L. J., Warm, J. S., et al. (2000). Adaptive integration of head-coupled multi-sensory displays for target localization. In Proceedings of the XIVth Triennial Congress of the International Ergonomics Association and 44th Annual Meeting of the Human Factors and Ergonomics Society (pp. 3.77–3.80). Santa Monica, CA: Human Factors and Ergonomics Society.
Natalie Steinhauser is a graduate student at the University of Central Florida, where she is working on her master’s degree in modeling and simulation. She also works as a research psychologist at the Naval Air Warfare Center Training Systems Division. Her interests include layout and design, training technologies, and aviation human factors. She can be reached at 12350 Research Pkwy., Orlando, FL 32826;
[email protected]. Davin Pavlas is a doctoral student in the University of Central Florida’s Applied Experimental/Human Factors Program and also works at the Institute for Simulation and Training, with a primary focus on simulation and serious games. His additional interests include Web usability and flow state. Peter Hancock is Provost Distinguished Research Professor and Pegasus Professor in the Department of Psychology and the Institute for Simulation and Training at the University of Central Florida. He is a Fellow and past president of the Human Factors and Ergonomics Society.
Steinhauser, N.B., Pavlas, D., & Hancock, P.A. (2009). Design principles for adaptive automation and aiding. Ergonomics in Design, 17 (2), 6-10 10
E
RGONOMICS
IN
D
ESIGN
•
SPRING
2009