Erd˝os-P´osa Property and Its Algorithmic Applications — Parity Constraints, Subset Feedback Set, and Subset Packing Naonori Kakimura∗
Ken-ichi Kawarabayashi†
that G − X has no odd S-cycle, or concludes that such a vertex set does not exist.
Abstract The well-known Erd˝ os-P´ osa theorem says that for any integer k and any graph G, either G contains k vertexdisjoint cycles or a vertex set X of order at most c·k log k (for some constant c) such that G−X is a forest. Thomassen [39] extended this result to the even cycles, but on the other hand, it is well-known that this theorem is no longer true for the odd cycles. However, Reed [31] proved that this theorem still holds if we relax k vertex-disjoint odd cycles to k odd cycles with each vertex in at most two of them. These theorems initiate many researches in both graph theory and theoretical computer science. In the graph theory side, our problem setting is that we are given a graph and a vertex set S, and we want to extend all the above results to cycles that are required to go through a subset of S, i.e., each cycle contains at least one vertex in S (such a cycle is called an S-cycle). It was shown in [20] that the above Erd˝ os-P´ osa theorem still holds for this subset version. In this paper, we extend both Thomassen’s result and Reed’s result in this way. In the theoretical computer science side, we investigate generalizations of the following well-known problems in the framework of parameterized complexity: the feedback set problem and the cycle packing problem. Our purpose here is to consider the following problems: the feedback set problem with respect to the S-cycles, and the S-cycle packing problem. We give the first fixed parameter algorithms for the two problems. Namely; 1. For fixed k, we can either find a vertex set X of size k such that G − X has no S-cycle, or conclude that such a vertex set does not exist in O(n2 m) time (independently obtained in [7]). 2. For fixed k, we can either find k vertex-disjoint S-cycles, or conclude that such k disjoint cycles do not exist in O(n2 m) time. We also extend the above results to those with the parity constraints as follows; 1. For a parameter k, there exists a fixed parameter algorithm that either finds a vertex set X of size k such that G − X has no even S-cycle, or concludes that such a vertex set does not exist. 2. For a parameter k, there exists a fixed parameter algorithm that either finds a vertex set X of size k such ∗ University of Tokyo, Tokyo 113-8656, Japan. Partly supported by Grant-in-Aid for Scientific Research and by Global COE Program “The research and training center for new development in mathematics,” MEXT, Japan. E-mail: {kakimura, kobayashi}@mist.i.u-tokyo.ac.jp † National Institute of Informatics, 101-8430, Japan. Partly supported by JSPS, Grant-in-Aid for Scientific Research, by C & C Foundation, and by Inoue Research Award for Young Scientists. Email: k
[email protected]
1726
Yusuke Kobayashi∗
3. For a parameter k, there exists a fixed parameter algorithm that either finds k vertex-disjoint even Scycles, or concludes that such k disjoint cycles do not exist. 4. For a parameter k, there exists a fixed parameter algorithm that either finds k odd S-cycles with each vertex in at most two of them, or concludes that such k cycles do not exist.
1
Introduction
Packing and covering are one of the central areas in both graph theory and theoretical computer science. The starting point of this research area goes back to the following well-known theorem due to Erd˝os and P´osa [10] in early 1960’s. ˝ s and Po ´ sa [10]) For any inteTheorem 1.1. (Erdo ger k and any graph G, either G contains k vertexdisjoint cycles or a vertex set X of order at most c · k log k (for some constant c) such that G − X is a forest. Theorem 1.1 is concerned with both “packing,” i.e., finding k disjoint cycles, and “covering,” i.e., finding at most ck log k vertices that hit all the cycles in a graph. Starting with this theorem, there are many results in this direction in both graph theory and theoretical computer science. In fact, Theorem 1.1 gives rise to the Erd˝os-P´osa property for a family of graphs. A family F of graphs is said to have the Erd˝ os-P´ osa property if for every integer k there is an integer f (k, F) such that every graph G contains either k vertex-disjoint subgraphs each isomorphic to a graph in F or a set X of at most f (k, F) vertices such that G − X has no subgraph isomorphic to a graph in F. The term Erd˝osP´osa property arose because of Theorem 1.1 which proves that the family of cycles has this property. In this paper, we study the Erd˝os-P´osa property for the family of cycles under various constraints and its algorithmic aspects. 1.1 Erd˝ os-P´ osa Property with Parity Constraints We first discuss a generalization of Theorem
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
1.1 to impose parity constraints on the length of cycles. Thomassen [39] showed that the Erd˝os-P´osa property holds for the family of cycles of length divisible by a fixed p. This immediately provides the Erd˝os-P´osa property for the family of even cycles, i.e., the cycles of even length. Wollan [40] discusses the Erd˝os-P´osa property for the family of cycles under another kind of modularity constraints. However, the family of odd cycles is known not to have the Erd˝os-P´ osa property. In fact, Lov´asz and Schrijver (see also Dejter and Neumann-Lara [8]) give infinitely many pairs l and m such that the Erd˝os-P´osa property does not hold for the family of cycles of length l mod m. On the other hand, Reed [31] showed that a half-integral packing of odd cycles has the Erd˝os-P´osa property. Here a half-integral packing of k odd cycles is a set of k odd cycles such that each vertex is in at most two of these odd cycles. Reed [31] also found the only obstruction preventing the Erd˝os-P´osa property for the odd cycles from holding. An Escher wall is a wall of height h together with h “twisted” paths from the top to the bottom of the wall that are internally disjoint from the wall (see e.g., [31] for the precise definition). It is shown in [31] that for a positive integer k, there exists a constant f (k) such that if a graph G does not contain an Escher wall then G has either k vertex-disjoint odd cycles or a vertex set X ⊆ V with size ≤ f (k) such that G − X has no odd cycle.
this is a generalization of Theorem 1.1 to the “subset” version. Recently, Pontecorvi and Wollan [30] showed f (k) = Θ(k log k), which is the same bound as Theorem 1.1. 1.3 Our Contribution for the Erd˝ os-P´ osa Property In this paper, we first present a common generalization of Thomassen’s classical result [39] and Theorem 1.2. That is, we show the Erd˝os-P´osa property for the family of S-cycles of length divisible by a fixed p. Theorem 1.3. Let k and p be positive integers. Then there exists a constant f (k, p) such that any graph G = (V, E) with S ⊆ V has either k vertex-disjoint S-cycles, each of which has length divisible by p, or a vertex set X of order at most f (k, p) such that G − X has no such S-cycles. As a corollary, we know that the family of even S-cycles, i.e., when p = 2, has the Erd˝os-P´osa property. Corollary 1.1. Let k be a positive integer. Then there exists a constant f (k) such that any graph G = (V, E) with S ⊆ V has either k vertex-disjoint even Scycles or a vertex set X of order at most f (k) such that G − X has no even S-cycles. We also extend the Reed’s result [31] mentioned above to packing odd S-cycles in a half-integral way.
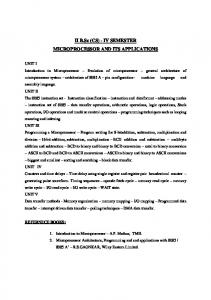
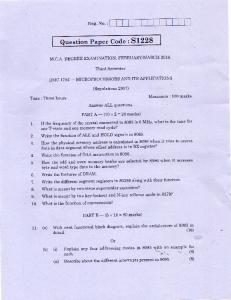
Theorem 1.4. Let k be a positive integer. Then there exists a constant f (k) such that any graph G = (V, E) 1.2 Erd˝ os-P´ osa Property through Prescribed with S ⊆ V has either a half-integral packing of k odd Vertex Set Another direction to generalize the cycle S-cycles or a vertex set X of order at most f (k) such packing problem is packing cycles that are required to go that G − X has no odd S-cycles. through a given set of vertices. For a graph G = (V, E) with S ⊆ V , an S-cycle is a cycle which has a vertex in One might expect to extend Reed’s result for the S. The problem called “S-cycle packing” is that we are obstruction to packing odd S-cycles, that is, if a graph given a graph G and a subset S of its vertices, and the G does not contain an Escher wall, then the Erd˝osgoal is to find as many vertex/edge-disjoint cycles that P´osa property for odd S-cycles holds. However, this intersect S as possible. For this problem, approximation extension does not hold. In fact, consider the graph algorithms have been studied in theoretical computer depicted as in Figure 1, i.e., the graph √ G defined to be science (e.g., [29]), while it seems that the Erd˝os-P´osa an elementary wall of height h = Ω( |V |) with h edges type result has not been explored yet. This is one of connecting the bottom vertices and h paths of length our motivations of this paper. It was proved in [20] two between the top vertices that are internally disjoint that the Erd˝os-P´ osa type result holds for the S-cycle from the wall. Define a vertex set S to be the set of packing problem. Namely: vertices not in the wall. This graph contains no Escher Theorem 1.2. Let k be a positive integer. Then there wall, but it is easy to check that G has no two vertexexists a constant f (k) such that any graph G = (V, E) disjoint√odd S-cycles, while we have to delete at least with S ⊆ V has either k vertex-disjoint S-cycles or a h = Ω( |V |) vertices to make G have no odd S-cycles. vertex set X of order at most f (k) such that G − X has 1.4 Subset Feedback Set and S-cycle Packing in no S-cycles. view of Fixed Parameter Tractability The Erd˝osNote that the case where S coincides with the whole P´osa property also initiates some areas in theoretical vertex set V , any cycle in a graph is an S-cycle. Thus computer science. This property is clearly related to
1727
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
S
S
S
Figure 1: An example not satisfying the Erd˝os-P´osa property for odd S-cycles.
the cycle packing problem, which asks to find maximum number of vertex-disjoint(or edge-disjoint) cycles in an input graph G. For the edge-disjoint variant of this problem, Caprara et al. [5] designed an O(log n)-approximation algorithm, where n is the number of vertices of the input graph, and Krivelevich et √ al. [29] proved that this algorithm yields O( log n)approximation factor. For the vertex-disjoint one, the proof of Theorem 1.1 due to Simonovits [37] leads to an O(log n)-approximation algorithm. For the S-cycle packing problem, Pontecorvi and Wollan [30] showed that their proof of Theorem 1.2 derives an O(log n)approximation algorithm for both vertex/edge-disjoint cases. Also, “covering” leads to the well-known concept “feedback set” in theoretical computer science. The problem of finding a minimum feedback vertex set (FVS) in a graph, i.e., the smallest set of vertices whose deletion makes the graph acyclic, has many applications and its history can be traced back to the early 60’s (see the survey of Festa et al. [12]). It is also one of the classical NP-complete problems from Karp’s list [21]. Thus not surprisingly, for several decades, many different algorithmic approaches were tried on this problem including approximation algorithms [2, 3], linear programming [6], polyhedral combinatorics [4, 14], exact algorithms [13] and parameterized complexity [16]. The problem called “subset feedback set” is a natural generalization of the feedback set problem, which corresponds to the linear programming dual of the S-cycle packing problem. The subset feedback set problem is that we are given a graph G and a subset S of its vertices, and the goal is to find a vertex set X of minimum order such that G − X has no S-cycle. For this problem, Even et al. [11] gives an 8-approximation algorithm. In this paper, we are interested in the framework of parameterized complexity developed by Downey and Fellows [9] for both the S-cycle packing and subset feed-
1728
back set problems. The standard goal of parameterized analysis is to take some parameter, say k, out of the exponent in the running time. A problem is called fixedparameter tractable (FPT) if it can be solved in time O(f (k)nc ), where n is the number of vertices of the input graph, c is a constant not depending on k, and f is an arbitrary function. An algorithm with such a running time is also called FPT. We can trivially determine whether or not G has a vertex set X of order at most k such that G − X has no S-cycle in O(nk+2 ) time by enumerating all k-tuples of vertices in G. Although this is polynomial time for each fixed k, it is practically too slow for large inputs, even if k is relatively small. Our first main result here is an FPT algorithm for the subset feedback set problem. For a vertex set S ⊆ V , we say that a vertex set X ⊆ V is an S-cycle feedback vertex set (S-FVS for short) if G − X contains no S-cycles. Theorem 1.5. For a graph G = (V, E), a vertex set S ⊆ V , and a fixed integer k, we can either find an Scycle feedback vertex set X of size k, or conclude that such a vertex set does not exist in O(n2 m) time, where n is the number of vertices and m is the number of edges. Note that, in 2010, an FPT algorithm for the subset feedback set problem was also given in [7] independently. But our algorithm has a few more appealing points. Our proof is somehow shorter, and in addition, the same framework can be applied to solve the S-cycle packing problem below and these parity-constrained problems as in Section 1.5. Our second result is the first FPT algorithm for the S-cycle packing problem. Theorem 1.6. For a graph G = (V, E), a vertex set S ⊆ V , and a fixed integer k, we can either find k vertexdisjoint S-cycles, or conclude that such k vertex-disjoint cycles do not exist in O(n2 m) time. Let us observe that if S = V (G), then we can find k vertex-disjoint cycles in linear time for fixed k, if they exist. Indeed, if a given graph has large tree-width, then we can do this from the existence of a large grid minor, and otherwise we can use the dynamic programming to find vertex-disjoint cycles. On the other hand, this would not work for the Scycle packing problem. In fact, the problem setting is closer to the well-known “disjoint paths problem for a fixed number of terminals” [33] as pointed out in [29]. Using the result in [33], we can determine whether or not G has k vertex-disjoint S-cycles in O(n2k+3 ) time as follows: we enumerate all k pairs of vertices such that each pair contains at least one vertex in S, and
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
for such pairs we apply Robertson-Seymour’s O(n3 ) time algorithm for finding k vertex-disjoint paths [33]. We emphasize here that even obtaining an nO(k) time algorithm is non-trivial without using the graph minor theory, which implies that the S-cycle packing problem is harder than the subset feedback set problem. Thus we shall use some tools from the graph minor theory to obtain our results.
cycles, or concludes that such k vertex-disjoint cycles do not exist.
1.5 Parity-Constrained Subset FVS and Scycle Packing Since we have shown the Erd˝os-P´osa property for the family of S-cycles with parity conditions, we also investigate parameterized complexity for the parity-constrained version of subset FVS and Scycle packing. That is, we further generalize the subset feedback set problem and the S-cycle packing problem to those with parity constraints on the length of cycles. Let us remark that our problem setting includes packing and covering parity-constrained cycles (when S = V ), especially packing odd cycles [27, 35] and odd cycle transversal [26, 32]. Our contributions are summarized in Table 1. Concerning the S-cycle feedback set problems with parity constraints, we show the following two results. For a vertex subset S ⊆ V , we say that a vertex set X ⊆ V is an even/odd S-cycle feedback vertex set (even/odd S-FVS for short, respectively) if G − X contains no even/odd S-cycles.
Again, Theorem 1.9 generalizes an FPT algorithm for the problem without parity constraint (see Theorem 1.6) because if we subdivide each edge once, then the resulting graph is bipartite, and k vertex-disjoint even S-cycles given by Theorem 1.9 in the bipartite graph clearly gives rise to k vertex-disjoint S-cycles in the original graph.
Note that Theorem 1.7 generalizes an FPT algorithm for the problem without parity constraint (see Theorem 1.5) because if we subdivide each edge once, then the resulting graph is bipartite, and an even S-FVS given by Theorem 1.7 in the bipartite graph clearly gives rise to an S-cycle feedback set in the original graph. Concerning the even/odd S-cycle packing problems, we show the following two results.
For S, T ⊆ V , an S-path with respect to T is a path with end vertices in T such that it has at least one vertex of S. The following theorem is derived in [20] from Theorem 2.1.
Theorem 1.10. For a graph G = (V, E), a vertex set S ⊆ V , and a parameter k, there exists an FPT algorithm that either finds a half-integral packing of k odd S-cycles, or concludes that such k cycles do not exist.
1.6 Organization In this paper, we mainly discuss parameterized complexity for packing S-cycles, i.e., the proof of Theorem 1.6. The details of other results can be found in the full version [17, 18, 19, 24]. Since our FPT algorithm follows the framework of RobertsonSeymour’s algorithm for the disjoint paths problem [33], we provide some useful tools in graph minor theory and overview their algorithm in Section 2. In Section 3, we describe the proof of Theorem 1.6, and finally we present proof sketches of other theorems.
2 Preliminaries Theorem 1.7. For a graph G = (V, E), a vertex set 2.1 Odd Paths, S-paths, and Odd Clique ModS ⊆ V , and a fixed integer k, we can either find an even els We first recall the results of Geelen et al. [15] for S-cycle feedback vertex set X of size k, or conclude that packing odd paths. such a vertex set does not exist in O(n3 m) time, where n is the number of vertices and m is the number of edges. Theorem 2.1. (Geelen et al. [15]) Let G = (V, E) be a graph with T ⊆ V . Then, in O(kn2 ) time, we can Theorem 1.8. For a graph G = (V, E), a vertex set find either S ⊆ V , and a fixed integer k, we can either find an • k vertex-disjoint paths, each of which has an odd odd S-cycle feedback vertex set X of size k, or conclude 3 number of edges and its end points in T , or that such a vertex set does not exist in O(n m) time, where n is the number of vertices and m is the number • a vertex set Z ⊆ V with |Z| ≤ 2k − 2 that intersects of edges. every such path.
Theorem 1.9. For a graph G = (V, E), a vertex set S ⊆ V , and a parameter k, there exists an FPT algorithm that either finds k vertex-disjoint even S-
1729
Theorem 2.2. Let G = (V, E) be a graph, and S, T ⊆ V . Then, in O(kn2 ) time, we can find either • k vertex-disjoint S-paths with respect to T , or • a vertex set Z ⊆ V with |Z| ≤ 2k − 2 that intersects every S-path with respect to T .
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
Erd˝os-P´ osa property FPT for subset FVS FPT for S-cycle packing
Table 1: Summary of Our Contribution No parity Even constraint Odd constraint [20] this paper this paper (half integral) [7] and this paper this paper this paper this paper this paper this paper (half integral)
For an integer p, Kp is the complete graph with p vertices. A graph G contains a Kp -model if there exists a function σ with domain V (Kp ) ∪ E(Kp ) such that 1. for each vertex v ∈ V (Kp ), σ(v) is a tree of G, and the trees σ(v) (v ∈ V (Kp )) are pairwise vertexdisjoint, and
one can find in O(kn2 ) time an odd Kp -model in K from the union of K and such 4p disjoint paths. (b) Otherwise, i.e., if G has no such 4p disjoint paritybreaking paths, then one can find in O(kn2 ) time Z ⊆ V (G) with |Z| ≤ 8p − 2 such that the (unique) block of G − Z that intersects all the clique nodes disjoint from Z is bipartite.
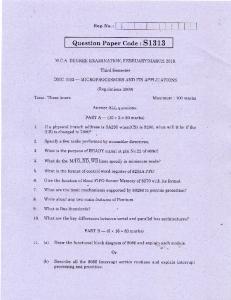
2. for each edge e = uv ∈ E(Kp ), σ(e) is an edge f ∈ E(G), such that f is incident in G with a Note that we can decide whether (a) or (b) holds in vertex in σ(u) and with a vertex in σ(v). O(kn2 ) time by Theorem 2.1. Proposition 2.1 implies We also say that G contains a Kp -minor if and only if G the following lemma. contains a Kp -model. We call the tree σ(v) (v ∈ V (Kp )) the node of the Kp -model. The image of σ, which is a Lemma 2.1. Let p be a positive integer, and K be a K12p -model in a graph G. subgraph of G, is called the Kp -model. A Kp -model K is even if K is bipartite. It is known (a) If there are 4p vertex-disjoint S-paths with respect that every graph containing a large clique model has to V (K) such that the 8p endpoints of these paths an even clique model. More precisely, it was shown are the centers of distinct nodes of K, then one in [15] that there exists a constant c such√that every can find in O(kn2 ) time a Kp -model such that each graph containing a Kt -model with t ≥ ⌈c · p log p⌉ also cycle in it has a vertex of S. contains an even Kp -model. For a bipartite subgraph H, a path in G is parity-breaking with respect to H if (b) Otherwise, i.e., if G has no such 4p disjoint Sits end points are in H and the parity is different from paths, one can find in O(kn2 ) time Z ⊆ V (G) with the paths in H between them. A block of a graph means |Z| ≤ 8p − 2 such that the (unique) block of G − Z a maximal subgraph with the property that it is either that intersects all the clique nodes disjoint from Z 2-connected or a 1- or 2-vertex complete graph. We has no vertices of S. say that a Kp -model K is odd if for each cycle C of K the number of edges of C that belong to clique nodes is 2.2 Flat and Dividing Walls Let h be a positive even. integer. A wall W of height h is defined to be a graph Let σ be a Kp -model, and v ∈ V (Kp ). A center which is isomorphic to a subdivision of the graph W h for σ(v) is a vertex t ∈ V (σ(v)) such that for each with vertex set V (W ) = {(i, j) | 0 ≤ i ≤ h, 0 ≤ j ≤ h component H of σ(v)−t, the number of edges e ∈ E(Kp ) 2h} in which two vertices (i, j) and (i′ , j ′ ) are adjacent such that σ(e) is incident in G with a vertex of H is if and only if either (1) i′ = i and j ′ ∈ {j − 1, j + 1} or at most half the number of edges in Kp incident with (2) j ′ = j and i′ = i + (−1)i+j . The graph W is called h v. It is not hard to see that every node σ(v) has a an elementary wall. An example of a wall can be found center (perhaps more than one). Thus we assume that in Figure 2. A cycle of length six in W is called a brick h for each node, one of its centers has been selected, and of W . A brick of a wall is defined similarly. The nails h we often speak of the center of a node without further of a wall are the vertices of degree three within it. explanation. Any wall has a unique planar embedding. The perimeter of a wall W , denoted per(W ) is the unique face in this embedding which contains more than six nails. The set of the nails on the perimeter, called (a) If there are 4p vertex-disjoint parity-breaking paths perimeter-nails, is denoted by pn(W ). For any wall with respect to K such that the 8p endpoints of these W in a graph G, there is a unique component U paths are the centers of distinct nodes of K, then of G − per(W ) containing W − per(W ). We call U
Proposition 2.1. (Geelen et al. [15]) Let K be an even K12p -model in G.
1730
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
r r r r r r r r r r r r r r r r r r r r r r r r rr rr r r
r r r r
r r
r r r
r rr r rr rrrrr
r r r
It is known that the folio can be solved in polynomial time if the tree-width is bounded. Theorem 2.3. (See [1, 33]) For integers w and k, there exists a (k + w)O(k+w) O(n2 ) time algorithm for computing the folio relative to a set of k vertices in graphs of tree-width w. Furthermore, if w and k are fixed, there exists an O(n) time algorithm.
r
Figure 2: A wall of height 3 the interior of W , denoted by int(W ). The compass of W , denoted comp(W ), is a subgraph induced by V (int(W )) ∪ V (per(W )). A subwall of a wall W is a wall which is a subgraph of W . A subwall of W of height h is proper if it consists of h consecutive bricks from each of h consecutive rows of W . A wall is flat if its compass does not contain two vertex-disjoint paths connecting the diagonally opposite corners. Note that if the compass of W has a planar embedding whose infinite face is bounded by the perimeter of W then W is clearly flat. It is shown in [36, 38] that a wall W is flat if and only if there are pairwise disjoint sets A1 , . . . , Al ⊆ V (comp(W )) containing no corners of W such that (1) for 1 ≤ i, j ≤ l with i ̸= j, N (Ai ) ∩ Aj = ∅, where N (Ai ) is the set of neighbors of Ai ,
When tree-width is large, in Robertson-Seymour’s algorithm for the disjoint paths problem or the folio, they first find a large clique minor or a large “almost flat” wall by the following theorem. Theorem 2.4. ([33, Theorem (9.8)]) For any p and any h there are computable constants g1 (p, h) and g2 (p, h) such that, if a given graph G has tree-width at least g1 (p, h), then there is an O(nm) time algorithm to find either a Kp -minor or a pair (X, W ) satisfying the following conditions: ( ) (C1) X is a vertex set with |X| ≤ p2 , (C2) W is a flat wall of height h in G − X, (C3) all the components A1 , . . . , Al (as in the definition “up to 3-separations”) have tree-width at most g2 (p, h).
(2) for 1 ≤ i ≤ l, |N (Ai )| ≤ 3, and
Note that there is now an O(n) time algorithm to obtain either a Kp -minor or a wall satisfying (C1)–(C3) [25]. Then they find an irrelevant vertex if the graph contains a large clique minor or a large flat wall. The following theorem plays a crucial role in their algorithm when the graph has a large clique minor. Actually, this theorem is used to find an irrelevant vertex in a clique If such A1 , . . . , Al exist, we say that comp(W ) can model in O(m) time. be embedded into a plane up to 3-separations, and an embedding as in (3) is called a flat embedding. Theorem 2.5. ([33, Theorem (5.3)]) Let Z be a vertex set with |Z| = 2k in a given graph G. Suppose 2.3 Folio As we mentioned in Section 1, we use some that there is a clique model K of order at least 3k in tools from graph minor theory. In this subsection, we G, and there is no separation (A, B) of order at most state some results of Robertson and Seymour. 2k − 1 in G such that A contains Z and B − A contains In [33], Robertson and Seymour gave a polynomial- at least one node of the clique model. Then, we can find time algorithm for the disjoint paths problem for a mutually disjoint connected subgraphs H1 , . . . , H2k of G fixed number of terminals. Actually, they solved a such that |V (Hi ) ∩ Z| = 1 for every i and there is an generalized problem called folio. For a vertex set X, edge between Hi and Hj which is contained in E(K) for a partition X = {X1 , . . . , Xq } of X is realizable if there every i ̸= j, in O(m) time. are disjoint trees T1 , . . . , Tq in G such that Xi ⊆ V (Ti ) Moreover, if the order of K is ≥ 3k + 1, we can take for i = 1, . . . , q. We say that a vertex v ∈ V \ X is H1 , . . . , H2k not intersecting with some node of K, and irrelevant with respect to X when a partition of X is the vertices in the node of K are irrelevant to the folio realizable in G − v if and only if it is also realizable in relative to Z. G. The list of realizable partitions of X is called the folio relative to X, and the problem of computing it is If we have a large flat wall, we can find an irrelevant also called the folio. vertex by the following theorem. (3) if W ′ is the graph obtained from comp(W ) by deleting Ai and adding new edges joining every pair of distinct vertices in N (Ai ) for each i, then W ′ may be drawn in a plane so that all corners of W are on the outer face boundary.
1731
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
Theorem 2.6. ([34], also [33, Theorem (10.2)]) For fixed integers k, p, there is a computable constant h1 (k, p) satisfying the following: if there is a subset X ⊆ V (G) of order at most p such that there is a flat wall W of height h1 (k, p) in G − X, then there is a vertex v in W such that v is irrelevant to the folio relative to a set of k vertices. Furthermore, if all the components G[A1 ], . . . , G[Al ] have tree-width bounded by a fixed constant, where A1 , . . . , Al are as in the flat embedding of comp(W ), we can find in O(m) time the irrelevant vertex v. Note that Robertson and Seymour actually showed that the “middle” vertices of a large flat wall are irrelevant. With these theorems, Robertson and Seymour [33] gave an O(n3 ) time algorithm for the folio. Note that the running time of their algorithm is improved to O(n2 ) time in [25]. 3 FPT Algorithm for Packing S-cycles In this section, we prove Theorem 1.6, that is, we give an O(n2 m) time algorithm for the following problem for fixed k. S-cycle Packing. Input. A graph G = (V, E), a vertex set S ⊆ V , and a fixed integer k (parameter). Problem. Find k vertex-disjoint S-cycles in G, or conclude that such cycles do not exist. Our FPT framework follows Robertson-Seymour’s algorithm for the disjoint paths problem described in Section 2.3. The first step is to examine whether or not the tree-width is large. If it is bounded by a fixed constant, then one can apply dynamic programming to a tree-decomposition of bounded tree-width similarly to Theorem 2.3. Otherwise, we apply Theorem 2.4 to G (p and h will be given later) and obtain either a Kp minor K or a pair (X, W ) satisfying (C1)–(C3). For both cases, we shall find an irrelevant vertex v, i.e., a vertex v such that G has a solution if and only if so does G − v. We remove v and go back to determine whether or not the tree-width is bounded. By repeating this at most |V | times, we find k vertex-disjoint S-cycles in G, or conclude that such cycles do not exist. Therefore, the remaining task in this algorithm is to find an irrelevant vertex in the Kp -minor K or the “almost flat” wall W efficiently. For that purpose, we first try to find many (depending only on k) vertexdisjoint S-paths with respect to K and W , respectively. If such paths exist, we can construct k vertex-disjoint S-cycles explicitly. Otherwise, it follows from Theorem 2.2 that there exists a vertex subset Z of bounded size such that deleting Z makes G have no such paths. That is, each s ∈ S is separated with at most one cut vertex
1732
from the clique model K in G − Z (the same is true for the flat wall case). The union of Z and the set U of such cut vertices for all s ∈ S separates K and all the vertices of S. The family of disjoint S-cycles leads to the family of disjoint paths with end vertices in Z ∪U on the clique side, and we do not need to take care of S on this side. Hence it suffices to find an irrelevant vertex as for the disjoint paths problems relative to Z ∪ U on the clique side. Reducing the size of U carefully described in Sections 3.1 and 3.2, we can find an irrelevant vertex in O(nm) time. Thus this algorithm runs in O(n2 m) time. 3.1 Large Clique Minor Set p = p′ + 3k when we apply Theorem 2.4, and suppose that G has a Kp -model K ′ . We may assume that K ′ is minimal, i.e., for every vertex v and every edge e in K, neither K ′ −v nor K ′ −e has a Kp -model. If there exists a node of the Kp -model that contains a vertex in S, then we can find an Scycle through three nodes of the Kp -model. That is, we obtain an S-cycle and a Kp−3 -model that are mutually disjoint. By finding a node that contains a vertex in S repeatedly, we can obtain either k vertex-disjoint Scycles or a Kp′ -model K containing no vertices of S. Therefore, in what follows in this subsection, we assume that we have such a Kp′ -model K. Let T be the set of centers of K, and suppose that p′ ≥ 36k. Then if there are 12k vertex-disjoint S-paths P1 , . . . , P12k with respect to T , Lemma 2.1 implies that we can construct a K3k -model such that each cycle in it has a vertex of S, which follows in a similar way to [15]. Hence this model contains k vertex-disjoint Scycles such that each of the S-cycles contains exactly three nodes of this model. Therefore, by Lemma 2.1, we can find in O(kn2 ) time either k vertex-disjoint Scycles, or Z ⊆ V with |Z| ≤ 24k − 2 such that G − Z contains no S-paths with respect to T . Let p′ be a sufficiently large integer (the definition will be given later). If we find k vertex-disjoint Scycles, then we are done. Thus, in what follows, we consider the case when we have a subset Z ⊆ V with |Z| ≤ 24k − 2 such that G − Z contains no S-paths with respect to the set T . Let S ′ ⊆ S be the subset of S contained in a connected component of G − Z intersecting with T . By Menger’s theorem, for any vertex s ∈ S ′ , there exists a vertex τ (s) ∈ V such that the connected component of G − Z − {τ (s)} containing s, say Gs , does not intersect with any vertex in T . We take such a∪ vertex τ (s) ∈ V − Z so that Gs is maximal. We denote s∈S ′ {τ (s)} by U = {u1 , . . . , uq }, and let Vi be the vertex set defined by Vi =
∪
{V (Gs ) | s ∈ S, τ (s) = ui }
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
for i = 1, . . . , q. Then the collection of Vi ’s is mutually disjoint by the definition of τ (s). Let V0 = V − Z − U − ∪ V . Then G[V0 ] intersects with K because T ⊆ V0 . i i Let U0 ⊆ U be the vertex set defined by U0 = {ui ∈ U | G[Vi ] contains an S-cycle}, and define U1 = U \U0 . Note that we can easily compute U0 . If |U0 | ≥ k, then we can immediately find k vertexdisjoint S-cycles, since the collection of Vi ’s is mutually disjoint. Suppose that |U0 | < k. Since a path internally disjoint from V0 with end vertices in V0 must contain at least one vertex in Z, we observe the following: (1) If G has vertex-disjoint S-cycles, then they intersect with at most 2|Z| sets of {Vi | ui ∈ U1 }. For simplicity, first consider the case where |U1 | is bounded by a fixed constant. Then we can find a vertex that is irrelevant to the existence of k vertexdisjoint S-cycles if K is large enough as follows. We find a separation (A, B) of G of minimum order such that A contains all vertices in S and B − A contains at least one node of K. Then, we find a vertex that is irrelevant to the folio relative to V (A) ∩ V (B) in B using Theorem 2.5, which is a desired vertex. However, the number of elements in U1 is not necessarily bounded. Our main idea is that we only need 2|Z| elements in each “equivalence class” of U1 by Observation (1). We now describe how to divide U1 into the equivalence classes. We introduce a new concept weak folio, which is a weaker concept than the folio. Let G = (V, E) be a graph and X ⊆ V be a set. We say that (s, t, γ), where s and t are distinct vertices in X and γ ∈ {0, 1}, is admissible if G has a path P from s to t such that P has a vertex of S if γ = 1. Let X = {(s, t, γ) | (s, t, γ) is admissible, s, t ∈ X}, called the weak folio relative to X. Note that |X | is bounded by a function of |X|. For each ui ∈ U1 , we compute the weak folio Xi relative to Z ∪ {ui } in G[Vi ∪ Z ∪ {ui }]. This can be computed in O(nm) time. Let U11 , . . . , U1r be the partition of U1 depending on the weak folios, that is, ui and ui′ are in the same set if and only if the weak folio relative to Z ∪ {ui } in G[Vi ∪ Z ∪ {ui }] and that relative to Z ∪ {ui′ } in G[Vi′ ∪ Z ∪ {ui′ }] are the same by exchanging ui and ui′ . Note that r is bounded by a function of |Z| + 1, say f1 (|Z|). If |U1j | > 2|Z| for some j, then we replace the vertex sets Vi ’s corresponding to all vertices in U1j by 2|Z| new vertices, and add all edges between these new vertices and the vertices in U1j . Let U1′j be the set of these 2|Z| vertices, and we replace V0 and U1j by V0 ∪ U1j and U1′j ,
1733
respectively. After executing this reduction for each j, we can find a vertex that is irrelevant to the existence of k vertex-disjoint S-cycles by Theorem 2.5 in O(m) time, since |U | ≤ 2|Z|f1 (|Z|). More precisely, we find a separation (A, B) of G[V0 ∪ Z ∪ U ] of minimum order such that A contains all vertices in Z ∪ U and B − A contains at least one node of K. Then, we find a vertex that is irrelevant to the folio relative to V (A) ∩ V (B) in B using Theorem 2.5. Note that by the conditions of Hi in Theorem 2.5, we do not need to consider paths (or trees) not intersecting with K when we find an irrelevant vertex in K. Thus, by Observation (1), we can see that this vertex is also irrelevant to the existence of k vertexdisjoint S-cycles. Note that, for the above arguments, we define p′ as an integer at least 3·(2|Z|f1 (|Z|)+|Z|)+1 ≥ 3|U ∪Z|+1, and the total running time to find an irrelevant vertex is O(nm). 3.2 Large Wall We may assume that each connected component of G is 2-connected. Suppose we are given a graph G = (V, E), a vertex set S, and a pair (X, W ′ ) in G − T satisfying (C1)–(C3) in Theorem 2.4, where h will be given later. Then W ′ contains k disjoint flat walls of height h/k. If the compass of each wall contain an S-cycle then we are done. Otherwise, we can find a flat wall W of height h/k such that the unique block containing W in the compass has no vertices of S. We now use the following lemma. Lemma 3.1. ([20]) Let k be a positive integer. Assume G has a cycle C with no vertices of S. If G has 4k log2 (k + 10) vertex-disjoint S-paths with respect to V (C), then there are k vertex-disjoint S-cycles. Moreover, such k vertex-disjoint S-cycles can be found in linear time. By applying Theorem 2.2 and Lemma 3.1 to the wall W of height h/k that contains no vertices of S, we can find either k vertex-disjoint S-cycles, or Z ⊆ V with |Z| ≤ 8k log2 (k + 10) − 2 such that G − Z contains no S-paths with respect to V (per(W )), in O(kn2 ) time. If we have k vertex-disjoint S-cycles, we are done. Hence, we may assume that we obtain a subset Z ⊆ V with |Z| ≤ 8k log2 (k + 10) − 2 such that G − Z contains no S-paths with respect to T = V (per(W )). By replacing Z with Z ∪ X, we use the same argument as the previous subsection. Then, there exists a vertex set U such that removal of Z∪U ∪X separates S and W . By Observation (1), the intersection of k vertexdisjoint S-cycles and G[V0 ∪ Z ∪ X ∪ U ] consists of at most 2|Z ∪X| paths whose end vertices are in Z ∪X ∪U , where V0 ⊆ V is defined in the same way as Section 3.1. Thus, it suffices to find a vertex in W that is irrelevant
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
to the existence of such 2|Z ∪ X| paths. By executing the same reductions as the previous subsection, we may assume that |Z ∪ U ∪ X| is bounded by a function of k, say f2 (k). That is, it suffices to consider the case when there is a separation (A, B) of bounded order such that A contains all vertices in S and B contains W . Then it follows from Theorem 2.6 that if we have a wall of height h1 (f2 (k), |X|), then removing some vertex of the wall does not affect the folio of B relative to V (A) ∩ V (B), where h1 is defined as in Theorem 2.6. Therefore, if we set h ≥ k · h1 (f2 (k), |X|), then we can find an irrelevant vertex in O(m) time. Thus the total running time to find an irrelevant vertex is O(nm). 3.3 Algorithm Finally in this subsection, we describe our algorithm for the S-cycle packing. Assume that p and h are given as in Sections 3.1 and 3.2. Recall that g1 is the function defined in Theorem 2.4. Algorithm for the S-cycle Packing. Input. A graph G = (V, E), a vertex set S ⊆ V , and a fixed integer k. Output. Find k vertex-disjoint S-cycles in G, or conclude that such cycles do not exist. Step 1. Determine whether the tree-width of G is at most g1 (p, h) or not. If it is at most g1 (p, h), then solve the problem by Theorem 2.3. Otherwise, go to Step 2. Step 2. Apply Theorem 2.4 to G and obtain either a Kp -minor or a pair (X, W ) satisfying (C1)–(C3) in Theorem 2.4. If we have a Kp -minor, then find an irrelevant vertex as in Section 3.1. Otherwise, we find an irrelevant vertex as in Section 3.2. Then, remove the irrelevant vertex and go to Step 1. Since we can find an irrelevant vertex in O(nm) time when k is fixed, this algorithm runs in O(n2 m) time. This completes the proof of Theorem 1.6. 4
FPT Algorithms Problems
for
Parity-Constrained
In Section 3, we have exploited graph minor theory to solve the S-cycle packing. For the parity-constrained problems, we additionally make use of recent results on odd clique minors [15] and the parity disjoint paths problem [28]. The parity disjoint path problem is that we are given a graph G = (V, E), a k pair of vertices (s1 , t1 ), (s2 , t2 ), . . . , (sk , tk ) in G, and a parity li ∈ {0, 1} for each i with 1 ≤ i ≤ k, and we aim at finding k vertexdisjoint paths P1 , . . . , Pk such that Pi joins si and ti and its parity is li for each i. Recently, Kawarabayashi, et al. [28] showed that this problem can be solved in polynomial time by extending the Robertson–Seymour’s algorithm for the disjoint paths problem.
1734
Similarly to the non-parity S-cycle packing in Section 3, we may consider when the tree-width is large, i.e., when there exists a large clique minor or a large “almost flat” wall, and the main task is to find an irrelevant vertex in these structures. Our FPT framework in Section 3, however, is not enough to find an irrelevant vertex, since we have to control the parity of cycles. To tract the parity constraints, we further divide the cliqueminor case into the following two cases, depending on whether G has a large odd clique minor or not. That is, we consider (1) A large odd clique minor with a huge clique minor. (2) A huge clique minor, but no large odd clique minors. (3) An “almost flat” wall of large height. First assume that we have a large odd clique minor. Then it is known that we can find an irrelevant vertex for the parity disjoint paths problem. By using this fact instead of Theorem 2.5, we can find an irrelevant vertex in the odd clique minor in a similar way to Section 3.1. We next discuss the case (2) where we have no odd clique minors. In this case, we know that it has a large even clique minor, and we apply Theorem 2.1 to obtain a vertex set X such that the unique block containing most of the clique nodes in G−X is bipartite. Then we follow the arguments in Section 3.1 for G−X, and find a vertex set Z such that G − X − Z contains no S-paths with respect to the clique minor. The block, say L, having the clique minor in G − X − Z is bipartite, and L has no vertices of S. Hence we could use Theorem 2.5 for the disjoint paths problem with respect to X ∪ Z (instead of Z in Section 3.1) in L to find an irrelevant vertex. Thus we may assume that there is no huge clique minor, which corresponds to the case (3). Let us remind that in Section 3.2, we separate S and the flat wall with small vertex set Z, and then apply Theorem 2.6 to find an irrelevant vertex. Here we can also obtain such Z by Theorem 2.2, and find an irrelevant vertex by results for the parity disjoint paths problem [28] instead of Theorem 2.6. Note that for the parity-constrained FVS problems, we do not need results in [28], and can find an irrelevant vertex in a simpler way by Theorem 2.1. Indeed, we can find a small vertex set Z that separates S and the flat wall, or a small vertex set Y such that the block having the wall in G−Y is bipartite, and, for both cases, we can find an irrelevant vertex by Theorem 2.6 with a careful analysis. See [19] for details. Finally, let us remark that these algorithms are inspired by the proofs of Theorems 1.3 and 1.4. In the proofs, assuming the induction hypothesis on k, we first observe that a counterexample graph G has large
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
tree-width. Hence there exists a large clique minor or a large “almost flat” wall, and G satisfies one of (1)– (3). We use these structures to construct k vertexdisjoint even/odd S-cycles explicitly, or we can find a small vertex set Z that separates one of (1)–(3) and one even/odd S-cycle with the aid of Theorems 2.1 and 2.2, which tells us the size of a minimum even/odd S-FVS is bounded by induction hypothesis. Note that the proofs are constructive but use a minimum even/odd S-FVS, and thus they do not directly lead to FPT algorithms. See [17, 18] for details.
[12]
[13]
[14]
References [15] [1] S. Arnborg and A. Proskurowski, Linear time algorithms for NP-hard problems restricted to partial ktrees, Discrete Applied Mathematics, 23 (1989), 11–24 [2] V. Bafna, P. Berman, and T. Fujito, A 2-approximation algorithm for the undirected feedback vertex set problem, SIAM Journal on Discrete Mathematics, 12 (1999), 289–297. [3] R. Bar-Yehuda, D. Geiger, J. Naor, and R. M. Roth, Approximation algorithms for the feedback vertex set problem with applications to constraint satisfaction and Bayesian inference, SIAM Journal on Computing, 27 (1998), 942–959. [4] M.-C. Cai, X. Deng, and W. Zang, A min-max theorem on feedback vertex sets, Mathematics of Operations Research, 27 (2002), 361–371. [5] A. Caprara, A. Panconesi, and R. Rizzi, Packing cycles in undirected graphs, Journal of Algorithms, 48 (2003), pp.239–256. [6] F. A. Chudak, M. X. Goemans, D. S. Hochbaum, and D. P. Williamson, A primal-dual interpretation of two 2-approximation algorithms for the feedback vertex set problem in undirected graphs, Operations Research Letters, 22 (1998), 111–118. [7] M. Cygan, M. Pilipczuk, M. Pilipczuk, and J. O. Wojtaszczyk, Subset feedback vertex set is fixed parameter tractable, Proc. the 38th International Colloquium on Automata, Languages and Programming (ICALP 2011), Lecture Notes in Computer Science 6755, 449– 461, 2011. See also arXiv:1004.2972v1 [cs.DS], 2010. [8] I. Dejter and V. Neumann-Lara, Unboundedness for generalized odd cycle transversability and a Gallai conjecture, the Fourth Caribbean Conference on Computing, Puerto Rico, 1985. [9] R. G. Downey and M. R. Fellows, Parameterized Complexity, Springer-Verlag, 1999. [10] P. Erd˝ os and L. Pos´ a, On the maximal number of disjoint circuits of a graph, Publ. Math. Debrecen, 9 (1962), 3–12. [11] G. Even, S. Naor, and L. Zosin, An 8-approximation algorithm for the subset feedback vertex set problem, SIAM Journal on Computing, 30 (2000), 1231– 1252. Conference version in Proceedings of the 37th An-
1735
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
nual Symposium on Foundations of Computer Science (FOCS), 1996, 310–319. P. Festa, P. M. Pardalos, and M. G. C. Resende, Feedback set problems, Handbook of Combinatorial Optimization, Supplement Vol. A, Kluwer Acad. Publ., Dordrecht, 1999, 209–258. F. V. Fomin, S. Gaspers, and A. V. Pyatkin, Finding a minimum feedback vertex set in time O(1.7548n ), Proceedings of the 2nd International Workshop on Parameterized and Exact Computation (IWPEC), 2006, 184–191. M. Funke and G. Reinelt, A polyhedral approach to the feedback vertex set problem, Proceedings of the 5th International Conference of Integer Programming and Combinatorial Optimization (IPCO), 1996, 445–459. J. Geelen, B. Gerards, B. Reed, P. Seymour, and A. Vetta, On the odd-minor variant of Hadwiger’s conjecture, Journal of Combinatorial Theory, Ser. B, 99 (2009), 20–29. J. Guo, R. Niedermeier, and S. Wernicke, Parameterized complexity of generalized vertex cover problems, Proceedings of the 9th International Workshop on Algorithms and Data Structures (WADS), 2005, 36–48. K. Kakimura and K. Kawarabayashi, Packing cycles through prescribed vertices under modularity constraints, manuscript, 2010. Available at http://www.misojiro.t.u-tokyo.ac.jp/˜kakimura/EPEvenScycle.pdf. K. Kakimura and K. Kawarabayashi, Halfintegral packing of odd cycles through prescribed vertices, manuscript, 2011. Available at http://www.misojiro.t.u-tokyo.ac.jp/˜kakimura/EPOddScycle.pdf. K. Kakimura and K. Kawarabayashi, Fixedparameter tractability for subset feedback set problems with parity constraints, manuscript, 2011. Available at http://www.misojiro.t.u-tokyo.ac.jp/ ˜kakimura/ParitySFVS.pdf. N. Kakimura, K. Kawarabayashi and D. Marx, Packing cycles through prescribed vertices, Journal of Combinatorial Theory, Ser. B, 101 (2011), 378–381. R. M. Karp, Reducibility among combinatorial problems, in Complexity of computer computations, Plenum Press, New York, 1972, 85–103. K. Kawarabayashi, Rooted minors problem in highly connected graphs, Discrete Math., 287 (2004), 121– 123. K. Kawarabayashi, On the connectivity of minimal counterexamples to Hadwiger’s conjecture, J. Combin. Theory Ser. B, 97 (2007), 144–150. K. Kawarabayashi and Y. Kobayashi, Fixed-parameter tractability for the subset feedback set problem and the S-cycle packing problem, manuscript, 2010. Available at http://www.misojiro.t.u-tokyo.ac.jp/˜ykoba/Scycle.pdf. K. Kawarabayashi, Y. Kobayashi and B. Reed, The disjoint paths problem in quadratic time, to appear in J. Combin. Theory Ser. B.
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.
[26] K. Kawarabayashi and B. Reed, An (almost) linear time algorithm for odd cycles transversal, Proc. ACMSIAM Symposium on Discrete Algorithms (SODA), 2010, 365–378. [27] K. Kawarabayashi and B. Reed, Odd cycle packing, Proc. 42nd ACM Symposium on Theory of Computing (STOC), 2010, 695–704. [28] K. Kawarabayashi, B. Reed and P. Wollan, The graph minor algorithm with parity conditions, to appear in Proc. 52nd Ann. IEEE Symp. Found. Comp. Sci. (FOCS’11). [29] M. Krivelevich, Z. Nutov, M. Salavatipour, J. Verstraete and R. Yuster, Approximation algorithms and hardness results for cycle packing problems, ACM Transactions on Algorithms, 3 (2007), Article 48. [30] M. Pontecorvi and P. Wollan, Disjoint cycles intersecting a set of vertices, manuscript. [31] B. Reed, Mangoes and blueberries, Combinatorica, 19 (1999), pp. 267–296. [32] B. Reed, K. Smith, and A. Vetta, Finding odd cycle transversals, Operations Research Letters, 32 (2004), pp. 299–301. [33] N. Robertson and P. D. Seymour, Graph minors. XIII. The disjoint paths problem, J. Combin. Theory Ser. B, 63 (1995), 65–110. [34] N. Robertson and P. D. Seymour, Graph minors. XXII. Irrelevant vertices in linkage problems, to appear in J. Combin. Theory Ser. B. [35] A. Schrijver, Combinatorial Optimization — Polyhedra and Efficiency, Springer-Verlag, 2003. [36] P. D. Seymour, Disjoint paths in graphs, Discrete Mathematics, 29 (1980), 293–309. [37] M. Simonovits, A new proof and generalizations of a theorem of Erd˝ os and P´ osa on graphs without k + 1 independent circuits. Acta Mathematica Academiae Scientiarum Hungaricae, 18 (1967), 191–206. [38] C. Thomassen, 2-linked graph, European Journal of Combinatorics, 1 (1980), 371–378. [39] C. Thomassen, On the presence of disjoint subgraphs of a specified type, Journal of Graph Theory, 12 (1988), 101–111. [40] P. Wollan, Packing cycles with modularity constraints, Combinatorica, 31 (2011), 95–126.
1736
Copyright © SIAM. Unauthorized reproduction of this article is prohibited.