IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT. VOL. EM-33. NO. 2. MAY 1986 evaluating Space Station Applications of. Automation and Robotics.
102
IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT. VOL. EM-33. NO. 2. MAY 1986
evaluating Space Station Applications of Automation and Robotics J O N A T H A N F . B A R D , MEMBER, IEEE
Abstract—The role that automation, robotics, and artificial intelli gence will play ta Space Station operations is B O W beginning to take shape. Although there is only limited data on the precise nature of the payoffs that these technologies are likely to afford there is a general consensus that, at a minimum, the following benefits will be realized: increased productivity, increased responsiveness to innovation, lower operating costs* and rédaction of exposure to hazards. Nevertheless, the question arises as to how ranch automation can he justified within the technical and economic constraints of the program? The purpose of this paper is to present a methodology which can be used to evaluate and rank different approaches to automating the fonctions and tasks planned for the Space Station. Special attention is given t o the impact of advanced automation o n human productivity. The methodology employed is based on îfe* Analytic Hierarchy Process (ΑΗΡ). This permits the introduction of individnal judgments to resolve the conflict that normally arises when incomparable criteria under!y the selection process. Because o f the large number of factors involved in the model, the overall problem is decomposed into four subproblems individually focusing o n human productivity, economics, design, and operations, respectively. The results from each are then combined to yield the final rankings. T o demonstrate the methodology, an example is developed based o n the selection of an on-orbtt assembly system. Five alternatives for performing this task are identified, ranging from an astronaut working in space, to a dexterous manipulator with sensory feedback. Computational results are presented along with their implica tions. A final parametric analysts shows that the outcome is locally insensitive to ail but complete reversals in preference. Key Words: Mnltkrtteria decision making. Analytic Hierarchy Proc ess, Project evaluation. Expert opinion.
I . INTRODUCTION
U
N D E R T H E L E A D E R S H I P of the National Aeronautics and Space Administration ( N A S A ) a vigorous effort is now underway t o establish a permanent m a n n e d presence in space by the early 1 9 9 0 ' s . Central t o this effort is the Space Station and it support systems including the Shuttle, a n orbit maneuvering vehicle, unmanned platforms, free-fliers, and attachment facilities for servicing, refueling, and storing sateiiites. Although the rationale for the Space Station can be adequately expressed in technological t e r m s a l o n e , there is a growing awareness that if the U . S . does not m o v e ahead with this program, whatever related advantages it n o w possesses will soon give w a y t o the forces of international competition. A s such, the climate is right t o move from a n e r a primarily centering on exploration to o n e that encompasses both the scientific and c o m m e r c i a l exploitation of s p a c e . In order to
Manuscript received August 1, 1985; revised December 2 , 1985. The author is with the Department of Mechanical Engineering, University of Texas at Austin. Austin. TX 78712-1063. IEEE Log Number 8607686.
meet this objective, it will b e necessary to reduce the cost and complexity of w o r k i n g a n d living in space without sacrificing the high level o f safety a n d reliability w e have thus far been able t o achieve. This injunction h a s led N A S A ' s Advanced Technology Advisory C o m m i t t e e to conclude that if the Space Station is to succeed it must b e highly automated; a n d t o recommend that u p to 13 percent o f the p r o g r a m ' s overall budget b e spent on research and development in related a r e a s [17]. In practical t e r m s , a deliberate thrust t o incorporate advanced automation and robotics c a n lead to increased productivity, lower operat ing costs, m o r e flexibility, improved reliability, and a reduc tion in life-threatening hazards. T h e r e f o r e , initial subsystem designs must utilize a s much mature automation as technologi cally feasible without precluding evolutionary growth and expected innovation. A primary goal will be to optimize the human-machine m i x of functions a n d skills at both the module and subsystem levels (see [23]). T h i s will permit the long-term realizable advances in automation t o b e easily accommodated, once available. Of equal importance is the role o f humans in space. Because the environment is a difficult o n e , t h e risks are great and must b e weighed against the promise for n e w knowledge and new commercial opportunities. But there is a great deal w e do not yet understand about either the environment o r its potential, and it is in just these circumstances that humans function best. Accordingly, Hall and W o l b e r s [6] assert that the human role should be based on what people a r e most capable of d o i n g , which is t o use their intelligence to perceive, to understand, t o redefine continually what h a s been learned, to take advantage of unforeseen opportunities, to solve unantici pated p r o b l e m s , a n d to a c q u i r e , integrate, and interpret mullisensory data. In short, they should function a s managers and laboratory scientists rather than as vehicle operators. Nevertheless, t h e question arises as to h o w much automa tion can be justified within the technical and economic constraints of t h e program? T h e purpose of this paper is to develop a model that can b e used to evaluate different approaches to automating the functions and tasks that are planned for t h e Space Station. Chief among these are monitoring a n d verification, fault m a n a g e m e n t , satellite serv icing, space manufacturing, a n d assembly of external struc tures. Recognizing that each application of automation and ro botics must be carefully weighed against a set of multiple and often incomparable criteria, t h e model relies on individual j u d g m e n t s to resolve any conflict that appears in the analysis.
O018-9391/86/O50O-01O2SO1.O0 © 1986 I E E E
103
BARD: SPACE STATION APPLICATIONS OP AUTOMATION AND ROBOTICS
These judgments tnke the form of pairwise comparisons between the different factors o r criteria reflecting their relative importance with respect to a particular function o r task, in order to address the interrelationships between the criteria, as well a s establish a means of treating any imprécisions in measurement that may arise, a hierarchical methodology is used [20]. T h e analysis is structured around the following four areas: human productivity, economics, operations, a n d d e sign. Results are obtained separately and then combined by solving a master problem to arrive at the final rankings. This contrasts with traditional cost-benefit and engineering tradeoff approaches which require a much greater data base before any analysis can be d o n e (see [ 3 ] , [15], for example). In the next section, the Space Station concept is briefly discussed. T h e methodology is presented in Section III and a representative analysis is conducted in Section I V . T h e e x a m p l e concentrates on the task of aligning and fastening mechanical linkages in space; the comparison data w e r e supplied by middle and upper level managers at the Johnson Space Center. Sections V and V I conclude with a discussion of the results and the potential applications and limitations of the methodology. T h e Appendix highlights the s y s t e m ' s design requirements and defines the terms associated with automa tion. I I . SPACE STATION CONCEPT
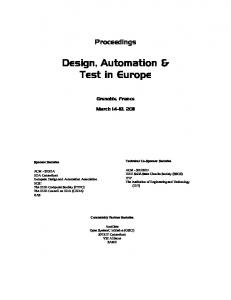
Although size a n d complexity strongly influence the engi neering of the Space Station, and suggest a higher degree of a u t o n o m y than n o w exists in most spacecraft, mission diver sity is the principal factor driving the design. Current operational concepts include a wide variety of scientific e x p e r i m e n t s , deep space and earth observation, manufacturing a n d processing of pharmaceuticals and alloys, a n d assembly of large-scale structures. C r e w time will therefore be a critical r e s o u r c e . A combination of greater demands on both flight and g r o u n d c r e w s , coupled with a long-term c o m m i t m e n t of m a n p o w e r and associated ground support, afford a potential for significant cost savings through automation. A schematic of t h e baseline Space Station is displayed in F i g . 1. T h e actual design requirements, and the definitions of t e r m s related to t h e accompanying technologies, are given in the Appendix. C u r r e n t l y , a number of research p r o g r a m s are u n d e r way to determine the most effective means of imple menting these technologies. F o r example, General Electric is building a dexterous manipulator to transfer material between automatic fabrication stations for the production of gallium arsenide (GaAs), a central ingredient in integrated circuits; a n d Martin-Marietta is working on the use of crane manipula t o r s t o unstow m o d u l a r elements, and to help astronauts on^ E x t r a Vehicular Activity ( E V A ) assemble them into struc tures. I I I . METHODOLOGY
In order to establish a general procedure for evaluating advanced automation alternatives a set of well-defined, uni formly acceptable criteria must be developed. This will be d o n e in a hierarchical framework. T h e intent is to offer a representation of the system that can be used t o examine how c h a n g e s in priorities at upper levels affect the priority of
Fig. 1.
Baseline Space Station configuration.
elements further d o w n the tree. T h e t o p of t h e hierarchy will provide the analytic focus in terms of a p r o b l e m statement. T h e example developed below will be concerned with select ing an on-orbit assembly system. At the next level, A e major considerations a r e defined, which, in our c a s e , will include human productivity, e c o n o m i c s , design, and operations. T h i s is usually followed by a listing of the criteria for each o f the above considerations. F o r human productivity these will include workload, support requirements, a c r e w acceptability, and issues surrounding m a n - m a c h i n e interfaces. Depending upon how much detail is called for in the model, each criteria may then b e broken d o w n into individual p a r a m e t e r s whose values a r e either estimated o r determined by measurement o r experimentation. T h e bottom level o f the hierarchy contains the alternatives o r scenarios underlying the p r o b l e m . W i t h regard to assembly, these might include an astronaut on E V A with tools, a dexterous manipulator under h u m a n control, a dedicated manipulator u n d e r computer control, a teleoperator maneuvering system with manipulator kit, o r a computer controlled dexterous manipulator with vision a n d force feed back. Once the hierarchy h a s been structured, local priorities must be established for each factor on a given level with respect to each factor o n the level immediately a b o v e it. This step will b e carried out b y using the Analytic Hierarchy Process ( Α Η Ρ ) which calls for pairwise comparisons between the factors t o develop the relative weights o r priorities. Because the approach is basically qualitative, it is arguably less b u r d e n s o m e t o implement from both a data requirements and validation point of view than the m o r e
104
IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT. VOL. EM-33. NO. 2, MAY 1986
common multiattribute utility approach of Keeney and Raiffa (9J. If, however, a m o r e quantitative approach is sought, the exercise required to construct the hierarchy has an inherent value that would likelv complement the subsequent analysis ( c f . [8], ( 1 0 1 , 1 1 2 ] , |221). T o illustrate t h e nature of the calculations, observe Fig. 2 which depicts a 3-level hierarchy—a s u m m a r y version of the example to be fully analyzed in the next section. Table I contains the input and output data for level 2 . When η factors are being c o m p a r e d , n(n — l ) / 2 questions are necessary to fill in the matrix. T h e elements in the lower triangle (omitted here) are simply the reciprocal of those lying above the diagonal; that is, a = \/a , In this instance, the entries in the matrix at the center of Table I are the responses to the 6 (η = 4) pairwise questions that w e r e asked. These responses were d r a w n from the 9-point scale shown in Table II (see | l 8 ] for a further explanation of how this scale was derived). For e x a m p l e , in comparing ' h u m a n productivity" with " e c o m o n i c " considerations (element a of the matrix), it was judged that t h e first " w e a k l y " dominates the second. Note that if the elicited value for this element w e r e 1/3 instead of 3 , then the opposite would have been t r u e . Similarly, the value 7 for element au means that design considerations " v e r y strongly" dominate those associated with operations. After the decision maker supplies all the data for the matrix the following equation is solved to obtain the rankings denoted by Jt
„.
HUKAK product m
AlTERMATi V£ 1
OPERATIONS
! ALTERNATIVE 5
ALTERNATIVE 2
Fig. 2.
Xj
DESIGN
EC0K0K1CS
rt
Summary' 3-level hierarchy for selection problem.
TABLE I PRIORITY VECTOR FOR MAJOR CONSIDERATIONS
4
l2
A w= X
m a x
Considerations 1) Huean
lk
kj
for all /, y,
k.
4 7
0 521
1
1
5
0 20«8
C . I . » 0. 040
1
7
0 227
C.R. = 0 0«5
1
0 0«7
Operations
Priorities
Output
Parameters s X 12 1
TABLE II
(1)
Definition
Explanation Both factors contribute equally the objective or criterion
to
1
Equal
3
Weskc iaportance of one over another
Experience and judgement slightly favor one factor over another
5
Essential or iaportance
Experience and judgement strongly favor one factor over another
7
Very strong or demonstrated Lsportance
A factor is favored very strongly over another; its dominance Is demonstrated in praotlce
9
Absolute
The evidence over another
2.*.6.8
In practice, the decision maker is only estimating the ' t r u e " elements of A by assigning them values from Table II, so the perfectly consistent case represented by (1) is not likely to occur. Therefore, as a n approximation, the elements of A can be thought to satisfy t h e relationship a^ = w,/vv, + where e -j is the error term representing the decision m a k e r ' s inconsis tency in j u d g m e n t w h e n comparing factor i to factor j \ As such, we would n o longer expect a t o equa l a a throughout . Carrying th e analysi s o n e ste p farther , i t ca n b e show n tha t th e largest eigenvalu e o f th e matri x Α, λ ^ , satisfies X > /i, where equality holds for the perfectly consistent case only. This leads to the definition of a consistency index
3 3
SCALE USED FOR PAIRWTSE COMPARISONS
n u x
tJ
2 3
3) Design «)
where w is the n-dimensiujial eigenvector associated with the largest eigenvalue X of the comparison matrix A. The η components of w a r e then scaled so they sum to 1. Consistency of response or transitivity of preference is checked by ascertaining whether a =aa,
1
2) Economics
Value
>v
Prod.
lsportance
strong
importance
Interaedlate
favoring one factor is unquestionable
Used when a compromise
values
Is needed
4
t
êJ
ik
No
The factor does not contribute the objective
relationship
to
results: η
1
2
3
4
5
6
7
8
9
10
Rl
0.00
0.00
0.58
0.90
1.12
1.24
1.32
1.41
1.45
1.49
kJ
m a x
C/^X^-*)/(*-!)
0
w h e r e η represents the dimension of the particular matrix, and Rl denotes the random index computed from the average of the CI for a large sample of r a n d o m matrices. It is now possible to define the consistency ratio as
(2) CR =
which can be used to evaluate the quality of the matrix A. T o add perspective w e c o m p a r e the Ci to the index derived from a completely arbitrary matrix whose entries are randomly chosen. Through simulation, Saaty has obtained the following
CI/RL
Experience suggests that the CR should be less than 0 . 1 if one is to be fully confident with the results. (There is a certain amount of subjectivity in this assertion m u c h like that
105
BARD: SPAC E STATIO N APPLICATION S O F AUTOMATIO N AN D ROBOTIC S â S S O C i m ê u W i t h interpretin
g t h v CGCificicn t OÏ dCiCfîÎïînâiîû n l u regression analysis. ) Fortunately , though , a s th e numbe r o f factors i n th e mode l increase s t h e result s b e c o m e les s an d les s sensitive t o th e value s i n an y o n e matri x (se e [20 ] fo r way s o f dealing wit h unreasonabl y hig h values) . Returning t o Tabl e I , i t ca n b e see n tha t th e prioritie s derived fo r th e majo r consideration s w e r e 0 . 5 2 1 fo r huma n productivity, 0 . 2 0 4 fo r economics , 0.22 7 fo r design , an d 0.047 fo r operations . Thes e figure s paralle l rathe r closel y those obtaine d i n relate d studie s usin g utilit y theor y (fo r example, [ 4 ] , [5]) , bu t ten d t o emphasiz e th e firs t consider ation m o r e , probabl y d u e t o th e implici t mandat e tha t th e Space Statio n mus t eventuall y pa y fo r itseu . Finall y not e tha t the consistenc y rati o i s wel l withi n th e acceptabl e range . T h e nex t ste p i s th e analysi s t o develo p th e prioritie s fo r th e factors o n th e thir d leve l wit h respec t t o thos e o n th e second . In ou r case , w e wil l compar e th e fiv e alternative s previousl y mentioned wit h eac h o f th e majo r considerations . F o r th e m o m e n t , assum e tha t th e appropriat e dat a hav e bee n elicite d and tha t th e calculation s performe d fo r eac h o f th e fou r comparison matrices , wit h th e result s displaye d i n Tabl e ΙΠ. T h e first four columns of data represent the local priorities derived from the inputs supplied by the decision maker. The global priorities are obtained by weighting each of these values by the local priorities given in Table I (note that each column sums to 1). Because there are no more levels left to evaluate, the values shown in the last column of Table ΠΙ represent the final priorities for the problem. T h u s , according to the j u d g e m e n t s expressed by this decision m a k e r , alterna tive 2 turns out to be most preferred. IV.
ANALAYSIS
T h e 3-level model used for illustrative purposes in the previous section has the advantage of simplicity but captures only the most general properties of the system under study. In developing a m o r e comprehensive model, one must strike a balance between detail, data requirements, and data availabil ity. In practice, straightforward weighting techniques can be effectively used to quickly narrow d o w n a large collection of options so greater attention can be given to the more promising. Miller et al. [14] take just such an approach in developing a set of advanced automation options for space applications. Others have used similar procedures with the same type of response data ( e . g . , see [ 1 ] , [19]). W e will now explore the implications of a full analysis by presenting the data underlying the 3-level " A s s e m b l y " model. T h e five alternatives are detailed in the Appendix. T h e first thing to note is that the number of criteria and factors needed to characterize any real problem is usually too large to neatly structure in a single hierarchy. In our case it w a s necessary to break the overall problem into four subproblems, each describing one of the major considerations, and then combine the results. T h e presentation will therefore follow this course. A.
Human
Productivity
A major rationale for developing advanced automation applications for the Space Station is that they will increase the productivity of both the ground and flight c r e w s . Benefits will
TP A
nf c
• nui^L.
m ill
LOCAL AND GLOBAL PRIORITIES FOR THE PROBLEM OF SELECTING AN ON-ORBIT ASSEMBLY SYSTEM Global Priorities
Local Priorities Alternatives*
Huaan
Prod. Economics
Design
Operations
1
0.066
0.415
0. 122
0.389
0. 165
2
0.212
0.309
0.22*
0.151
0.232
3
0.309
0.059
0.206
0.178
0.228
4
0. 170
0. 111
0. 197
0. 105
0.161
5
0.2*S3
0.10*6
0.251
0. 177
0.21*»
•Alternative 1: Alternative 2 : Alternative 3: Alternative 4: Alternative 5:
Astronaut on EVA with Tools Dexterous Manipulator under Huaan Control Dedicated Manipulator under Coaputer Control Teleoperator with Manipulator Kit Dexterous Manipulator with Sensory Feedback
be achieved by eliminating the need for humans to perform repetitive, tedious c h o r e s , and by extending the scope of work to include tasks that would ordinarily be impractical for the crew to u n d e r t a k e . F o r e x a m p l e , the multiplicity of monitor ing and calibration functions that must be carried out daily are prime candidates for computer control. Expert systems, or even assistant p r o g r a m s , can be used to guide an astronaut through a complex diagnostic routine as well as manage certain faults by providing facts and procedural information that w o u l d be difficult for any individual to r e m e m b e r . For onboard c o m p u t e r repair, such a system might contain a data base of design information, suggest tests, and recommend procedures for recovering from failure. O n a m o r e mundane level, a n on-board computerized inventory management sys tem can simplify the task of searching for stored equipment and material. It has been estimated that the amount of time the Shuttle flight c r e w has spent looking for misplaced items cou id have already justified the development costs of this system. Fig. 3 depicts the hierarchy fashioned for the human productivity phase of the analysis. Major considerations for this subproblem include workload, support requirements, acceptability, and m a n - m a c h i n e interfaces. At the next level a distinction is m a d e between the on-board and ground c r e w s . This is followed at level 4 by a set of six general criteria which are given explicit definition at level 5 by introducing 16 parameters. Table IV displays the input comparison matrix for the level 2 evaluations, and the resultant prioritization. T h e acceptabil ity factor obtained the highest score of 0.372 but w a s closely followed b y the m a n - m a c h i n e interface factor with a score of 0.366. T a b l e s V and VII contain the local and global priorities for levels 3 through 5 ; the data associated with t h e last set of comparisons for the 5 alternatives with respect t o each of the 16 parameters is shown in Table VIII. T h e final rankings are enumerated in Table III. Alternative 3—a dedicated manipula tor u n d e r computer control—achieved the highest score of 0.309. By tracing the individual comparisons it may be reasoned that high crew acceptability as measured b y the six criteria lead to this result. T h e least preferred alternative was the first—as astronaut on E V A with tools—primarily because of the extensive planning required to perform such a task, coupled with the obvious physical hazards. Note that R & D
106
IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT, VOL. EM-33, NO. 2, MAY 1986
ORGANIZATIONAL STRUCTURE
-REGIMEN
— S T A B I L I T Y IN ZERO-GRAVITY
-PLANNING a SCHEDULING
-CONFLICT RESOLUTION
-HUMAN INTELLIGENCE
-PHYSICAL
-TIME
-PSYCHOLOGICAL -WORKING ENVIRONMENT
-MAINTENANCE -TOOLS
-HUMAN RELIABILITY
-INFORMATION PROCESSING
-RESCUE -SUPPORT
Fig. 3.
Hierarchy for human productivity analysis.
TABLE IV PRIORITIES FOR THE MAJOR CONSIDERATIONS ASSOCIATED WITH SPACE STATION HUMAN PRODUCTIVITY Considerations
1 ) WorKload
1
2
3
4
Priorities
i
ι
1/3
0 203
1
2) Support 3) Accept.
Output
Parameters
1/7
0 059
C.I. s 0 101
1
2
0 372
C.R. = 0 112
Accept.
Man-Mach.
0.833
0.875
0.900
0.900
0.885
2)
Ground
0.167
0.125
0. 100
0. 100
0.115
Support
Tools Personnel
5)
Planning
6)
Maintenance
7)
Rescue
& Scheduling
Performance 8) Stability in Zero-g 9) « i o r K i n g Environment Organliatlonal Structure 10} Conflict Resolution 11) Human Reliability Health 12) Physical Health 13) Psychological Health Decision Matting 14) Human Intelligence 1 5 ) Information Processing 16) Sensory Load
Global Priorities
Priorities
Onboard
Workload
Time
3)
4) Support
TABLE V PRIORITIZATION OF LEVEL 3 FOR HUMAN PRODUCTIVITY SUBPROBLEM
Crew
2)
Logistics
0 366
Local
PRIORITIES Local Global
Training ÎT Regimen
: 4 30
λ,ax
1/5
«) Man-Mach.
TABLE VII PRIORITIZATION OF LEVEL 5 FOR HUMAN PRODUCTIVITY SUBPROBLEM
0 0 0 0
246 51U 141 069
0.011 0.025 0.007 0.003
0 066 0 149 0 785
0. 165
0 167 0 833
0.017 0.084
0 250 0 750
0.022 0.066
0 875 0 125
0.378 0.051
0 238 0 136 0 625
0.029 0.017 0.077 1 .000
0.014 0.031
costs, complexity of design, and operational difficulties d o not play a significant role in this phase of the analysis. TABLE VI PRIORITIZATION OF LEVEL 4 FOR HUMAN PRODUCTIVITY SUBPROBLEM Local Criteria
Onboard
Priorities
Global Priorities
Ground
1) Training
0.029
0.178
0.046
2) Logistics
0.181
0.433
0.210
3) Performance
0.11*
0.000
0.101
0.088
*) Org. Struct.
0.089
0.081
5) Health
0.482
0.0*» 1
0.431
6) Decision MKg.
0. 105
0.265
0. 124
B.
Economics
T h e Space Station is expected to be a vital national r e s o u r c e , not only for scientific experimentation, but for technological innovation a n d commercialization as well. T h e goal is to reach the initial operating capability (IOC) outlined in Section A of the Appendix by 1992 although it is by no m e a n s clear whether the baseline system can be built for the target price of $8 biiliori. Nevertheless, budgetary restrictions and competition for funds from other projects preclude any planning beyond this figure regardless of the present value of t h e p r o g r a m over its expected 20-year useful life.
107
BARD: SPACE STATION APPLICATIONS OF AUTOMATION AND ROBOTICS
TABLE VIII PRIORITIZATION OF LEVEL 6 FOR HUMAN PRODUCTIVITY SUBPROBLEM LOCAL
PRIORITIES
A l t e r n a t i v e s Parameters
_2
3
1)
Regimen
0.038
0. 079
0.440
0. 230
0. 213
2)
Time
0.042
0 . 131
0.534
0. 166
0. 127
3)
Tools
O.0U9
0. 469
0.269
0. 133
0. 079
4)
Support
0.033
0. 233
0.410
0
177
0. 147
5)
Planning
0.029
0. 149
0.510
0
105
0. 207
6)
Maintenance
0.055
0. 479
0.255
0
131
0. 080
Personnel &
7)
Rescue
8)
S t a b i l i t y
9)
Working
Scheduling
0.027
0. 285
0.285
0
117
0. 285
Zero-g
0.0*7
0. 141
0.557
0
126
0 . 126
Environment
0.034
0. 113
0.446
0
162
0. 226
Resolution
0.049
0. 167
0.324
0
125
0. 335
0.415
0. 119
0.052
0
100
0. 315
0.027
0. 243
0.243
0
243
0. 243
0.031
0
124
0.438
0 .113
0
0.046
0
103
0.470
0 .111
0. 270
0.422
0
163
0.052
0 . 110
0
254
0.058
0
140
0.489
0 . 116
0
197
in
10)
C o n f l i c t
1 1 )
Human
12)
Physical
13)
Psychological
14)
Human
R e l i a b i l i t y Health Health
I n t e l l i g e n c e
15)
Information
16)
Sensory
Processing
Load
294
resources needed, and by extending the lifetimes and versatil ity of Space Station systems. With regard to commercialization, space provides a variety of unique conditions that may b e effectively exploited. T h e s e include microgravity, high v a c u u m , isolation from distur bances and contamination, direct solar energy and cosmic rays, and a synoptic view of the Earth. Because automation will permit m o r e efficient use of the c r e w ' s time, it will help reduce operating costs, which in turn will affect the rates that the g o v e r n m e n t will have to charge its customers for using Space Station facilities. Returning to Fig. 4 , we see that each of the five system alternatives are subsequently c o m p a r e d at level 6 against the following five cost parameters: h a r d w a r e , software, support equipment a n d documentation, maintenance, and time saved. It should be noted that in the engineering design phase of any p r o g r a m , these parameters w o u l d have to be given m u c h greater definition and their values determined explicitly (see [23] for m o r e detail). O u r concern here, though, is only with relative o r d e r s of magnitude, and not specific values. Because the actual computations closely parallel those described in Section IV-B, the indivudial results for the economic subproblem will not b e presented here. T h e final rankings for each alternative, h o w e v e r , are displayed in T a b l e ΙΠ w h e r e it can be seen that the first—an astronaut on E V A with tools—convincingly dominates the others. This result can be traced b a c k to the strong preference placed on I O C costs by the decision maker throughout the analysis. Table IX presents the level 2 comparison data which serves to dramatize this point. C.
HARDWARE
I
SOFTWARE
i
Fig. 4.
MAINTENANCE
, SUPPORT EQUIPI MENT AND ; ! DOCUMENTATION
TIME SAVED
Hierarchy for economic analysis.
In light of this constraint, I O C costs tend to dominate the three other major considerations shown in Fig. 4—the hierar chical diagram used in the economic analysis. While long term benefits to the U . S . economy a n d increased worker productiv ity are extremely important issues, the first concern is to bring the p r o g r a m in on budget. In fact, advanced automation will play a major role in this regard by permitting a reduction in support personnel through greater a u t o n o m y , and introducing improved methods of construction and assembly. Examining recurrent costs, in addition t o enhanced crew productivity, cost savings will be realized by lowering the amount of ground
Design
F i g . 5 depicts the 4-level hierarchy used in the design p h a s e of the evaluation. T h e following five major considerations w e r e identified at level 2: physical characteristics, safety, technical characteristics, performance, and technology o p p o r tunities. In the comparisons, it w a s found that safety was the predominant concern with performance a far off second. These results are presented in Table X while the alternative rankings m a y once again b e found in Table III. T h e m o s t advanced alternative, number 5—a dexterous manipulator with sensory feedback—placed first, primarily due to its high ratings on safety, performance, and technology transfer. T h e E V A alternative was at the b o t t o m of the list for exactly the opposite reasons. In g e n e r a l , working in space can pose serious threats t o h u m a n s because of the hostile surroundings or the nature o f the materials a n d devices involved. Certain fuels are highly toxic o r volatile while some facilities require high temperature o r pressure environments. Completely automating the accompa nying activities would remove humans altogether from poten tially hazardous situations, but if the crew must w o r k outside the station occasionally, the use of automatic fault diagnosis and response can significantly reduce the dangers. F r o m a strictly design point of v i e w , some of the factors that should be taken in account in the evaluation follow. First, the Space Station should accommodate alternate configurations which readily allow for additions to and deletions from the
108
IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT, VOL. EM-33. NO. 2, MAY 1986
TABLE IX PRIORITIES FOR THE MAJOR CONSIDERATIONS ASSOCIATED WITH SPACE STATION ECONOMICS Considerations
1
2
3
*
1)
IOC
1
5
5
Τ
0.619
2)
teeur.
Costs
1
1/3
3
0. 109
C.I.
«
0.050
i)
Pr»a.
Impro* .
t
5
0.220
C.R.
«
0.089
1
0.052
* >
Costs
Long-Tar*
Fig. 5.
Output
P r i o r i t i e s
A
a a i
Parameters m
4.2*0
Hierarchy for design analysis.
TABLE X PRIORITIES FOR THE MAJOR CONSIDERATIONS ASSOCIATED WITH SPACE STATION DESIGN
Considerations
1
2
3
li
5
1 j Pnysicel
1
1/9
1/5
1/?
1/5
7
?
9
ι
1/3
2?
Safety
Chr .
P r i o r i t i e s 0.028
λ . . ,
•
5.5*5
0.6
C.I.
«
0.136
C.R.
»
0.122
30
3)
Technical
1/3
0.071
4)
Perforains*
2
0. 159
5)
Tech.
1
o . m
Chr.
3pport.
Output Parameters
currently planned mission profiles. Second, all autonomous functions should b e capable of being separately enabled, disabled, o r updated under the supervisory control of the ground o r fight c r e w s . T h i s is necessary t o ensure adequate in flight maintenance, modification, and performance analysis. Finally, because standard retrofit procedures attempted some years after t h e initial platform is launched would be prohibi tively expensive, growth potential must b e built into the design from the outset. It is not surprising t o note that the rankings of the five alternatives reflect these criteria almost e x a c d y . D.
Operations
A major goal for t h e Space Station is t o minimize both crew and ground control involvement in system monitoring through on-board automation and platform autonomy. This will maxi mize c r e w availability for mission activities which include the servicing o f internal a n d externally attached pay loads, super vising laboratory e x p e r i m e n t s , deploying payloads and upper
stages, and assembling large-scale structures. Initial ground control and support will b e in t h e form of flight and system monitoring a n d assistance during the deployment, assembly, checkout, a n d verification of each n e w Space Station element. A s time p r o g r e s s e s , m a n y of the planning activities and data management functions will b e assumed by expert systems. Automation and robotics technologies can increase h u m a n performance by decreasing operational requirements and b y mechanizing many of the related functions. Sky lab and Shuttle experience indicates that the individual productive time available p e r mission d a y is o n the order of 10 hours [23]. T h e remainder o f the d a y is taken up with housekeeping and personal c h o r e s . Productive time must include subsystem operation, monitoring, calibration, fault diagnosis and c o r r e c tion, planning, E V A , rendezvous/docking, customer servic ing, and o t h e r user related activities. Fig. 6 displays the 6-level hierarchy used to evaluate t h e issues underlying Space Station operatons. Major consider ations in this model included administration and management, maintenance, housekeeping, and emergencies. At level 3 a distinction is m a d e between on-board and ground personnel, while levels 4 a n d 5 contain the criteria and parameters, respectively. Table X I embodies the input and output data for the first set of evaluations. A s can b e seen, emergency considerations strongly dominate the other t h r e e , achieving a weight of 0 . 6 9 . This might suggest that a remote manipulator or robotics system would b e most preferred because of the reduced likelihood of emergency situations arising with their use. Nevertheless, the relatively high scores in performance and h u m a n factors an astronaut on E V A gets for the assembly task gives alternative 1 a substantial edge in the rankings (see Table III). V.
DISCUSSION
T h e final step in the analysis is t o derive the overall rankings by combining the results obtained for each of the four subproblems. T h e collective weights are presented in Table III where it c a n b e seen that alternative 2—a dexterous manipula tor under h u m a n control—slightly outscores alternative 3—a dedicated manipulator u n d e r computer control. Although t h e latter is clearly the superior choice when only h u m a n productivity is considered, its poor scores in * economics' and 'operations' reduce its attractiveness. Notice that the first alternative, E V A , turns out to be a rather weak contender despite its high scores in these t w o areas. This can be traced directly to its unacceptable showing in ' h u m a n productivity'. O n the other h a n d , t h e fifth alternative—a dexterous manipula tor with sensory feedback—does quite well in all categories, being the s y s t e m of choice in ' d e s i g n ' , but cannot currently b e justified from an e c o n o m i c point of view. In o r d e r t o test the sensitivity of these findings to variations in j u d g m e n t , the comparison data in each subproblem w e r e locally perturbed a n d the individual and collective sets o f weights r e c o m p u t e d . It w a s found that as long as transitivity was preserved, the overall results showed very little variation, with the rankings rarely changing. A s would be expected though, t h e impacts accompanying preference shifts a r e m o r e pronounced if they occur near the top of the hierarchy. F o r
109
BARD: SPACE STATION APPLICATIONS O F AUTOMATION AND ROBOTICS
ADMINISTRATION AND MANAGEMENT
HOUSEKEEPING
MAINTENANCE y
_
HUMAN FACTORS
I !
ACCEPTABILITY
collect the data off-line, then c o m p u t e the weights, perform a sensitivity analysis, and, if possible, hold a follow-up session to discuss t h e results. Even t h e most experienced analyst makes mistakes, and the time spent looking for and correcting errors during t h e interview c a n only lead t o impatience and hasty judgments o n the part o f t h e decisionmaker. Finally, when the number of alternatives is large, the comparisons at the bottom level of hierarchy m a y b e simplified by scoring the individual alternatives against criteria intensities (such a s excellent, good, fair, poor), themselves ranked b y the Α Η Ρ , rather than against each other. VI.
--INFORMATION PROCESSING
EASE OF USE TRAINING
—SKILL TRANSFER -PROBABILITY OF SUCCESS
Fig. 6.
Hierarchy for operations analysis.
TABLE XI PRIORITIES FOR THE MAJOR CONSIDERATIONS ASSOCIATED WITH SPACE STATION OPERATIONS Considerations 1)
Admin.
&
M g t .
2)
Maintenance
3)
House*ceepir.g
4)
Emergencies
1 1
2
4
3
Output Parameters
Priorities
1/3
3
1/7
0.088
1
5
1/7
0 . 178
1
1/9
0.043
1
0.690
λ
.
ββχ
«
».264
C I . = 0.088 C.R.
S
0.098
CONCLUSIONS
It has been shown how the Analytic Hierarchy Process can be used to evaluate automation a n d robotics applications for the upcoming Space Station. T h e methodology is completely general, though, and need not b e limited t o these technologies alone. Other promising areas o f application include the selection of the food system, habitat design, and the determi nation of pay load priorities. In this regard, t h e major considerations, criteria, and parameters developed for each of the four subproblems should not b e thought of as fixed. Each new problem will usually require modifications o r extensions of these factors to accommodate unique concerns. T h e flexible nature of the program easily permits such adjustments. If a more quantitative approach is called for, the Α Η Ρ is often a good first step in defining and structuring the problem. T h e fact that it requires only qualitative inputs, though, gives it an advantage over the m o r e formal multicriteria techniques such as multiattribute utility theory and goal programming in that it can b e used effectively in the early stages o f a program before detailed cost and performance data a r e available. T h e time and effort saved at t h e outset will return dividends throughout the course o f development. APPENDIX
example, the importance o f design' would only have t o b e increased by about 2 0 percent with respect t o h u m a n produc tivity in Table I before alternative 5 becomes dominant. This observation conforms directly with the way decisions are m a d e in practice since u p p e r management would b e expected t o provide the higher level j u d g m e n t s . With regard t o data collection, it should b e mentioned that the interviewing process c a n b e rather time consuming a n d tedious as the size o f the model g r o w s , if the decisionmaker is unfamiliar with the methodology, it usually takes about 3 0 min of explanation and demonstration before he feels comfortable answering t h e questions. A n additional 4 5 - 6 0 m i n a r e then required t o elicit t h e comparison data for a 6-level hierarchy equivalent in complexity t o the human productivity model. Most individuals found it easier to start at the bottom of the hierarchy with the parameters rather than at t h e top with t h e more general criteria. Note that all computations w e r e performed in negligible time o n a n I B M P C using a n interactive Basic p r o g r a m . A s a benchmark, it takes about 5 s to compute the eigenvector of a 6 x 6 matrix and at most 5 0 s to solve any one o f the four subproblems. F r o m a n operational standpoint, rather than d o all t h e analyses during the first interview, it may be m o r e efficient t o 4
A. Design
Requirements
At this time in the p r o g r a m , t h e mission o r customer requirements have been interpreted by N A S A [16] as calling for three separate spacecraft: a permanently manned Space Station in a 2 8 1/2° inclination, 270-nmi circular orbit; an unmanned coorbiting platform in a rendezvous-compatible orbit with both the Space Station and a second platform, itself in a 9 8 ° 430-nmi Sun-synchronous (2 P.M.) orbit. T h e manned element will b e required t o provide at least 5 0 k W of continuous power, a minimum c r e w of six with four to service customers, ports for attachment and servicing of two pressur ized laboratory payloads and seven unpressurized instrument payloads, a n d provisions for large space construction and orbital transport vehicle development. T h e coorbiting platform will b e designed t o accommodate payloads for celestial and solar observations, a n d sensitive microgravity experiments with a minimum of mechanical disturbance and contamination. T h e baseline design of the Space Station is envisioned as a set of deployed linear trusses t o which pressurized modules, subsystems, and other equipment a r e attached. T h e principal structural components a r e a keel and three b o o m s at right angles to the keel, as shown in F i g . 1. F o u r of the pressurized
î 10
IFi*F TRANSACTIONS ON ENGINEERING MANAGEMENT, V O t E M - 3 3 , NO. 2 , MAY 1986
modules (two habitation and t w o laboratory) will be arranged in a quadrangle to provide t w o access routes for the crew in case of e m e r g e n c y . T h e Shuttle will berth with the first habitation module eliminating excessive crew movement in t h e work area. Similarly, the logistics module will be berthed t o the second habitation module to permit unloading with m i n i m u m disturbance to laboratory operations. T h e Space Station is intended to be manned unless unfore seen circumstances force evacuation. The crew will rotate during the 90-day resupply cycle but there w ill always be 21 d a y s of reserve provisions to cope with emergencies. B. Automation
Definitions
Because there is often confusion in the use of the terms ""automation.*" ' r o b o t i c s . " and "artificial intelligence/* it will be useful t o make precise their meaning, at least for the purpose of this paper (see [17}). In so doing, it should be observed that the underlying fields have g r o w n out of many technologies including computer science, mechanisms, sen sors, and controls, so these terms will have somewhat different connotations depending upon the context. Nevertheless, the following definitions are offered. Artificial Intelligence is a subfield of computer science concerned with the concepts and method of symbolic inference and the symbolic representation of knowledge to be used in making inferences. The goal is t o m a k e a machine function in a manner that humans recognize as "intelligent** behavior in each other. A utomation is the use of machines to control or carry out processes in a predefined or modeled set of circumstances without human intervention. Advanced automation will be used to collectively refer to the fields of artificial intelligence, teleoperation. and robotics. Autonomy is an attribute that allows a system to operate at a specified performance level for a given period of time without external intervention. Fault tolerance and reliability a r e key features of autonomy. Expert Systems is a subfield of artificial intelligence concerned with developing computer programs that use knowledge and reasoning techniques in specific problem areas to emulate the decision processes of h u m a n experts. For an e x a m p l e , see [13]. Robotics is the study and use of machines capable of manipulation o r mobility with some degree of autonomy. The autonomy may be almost complete—as in the case of an industrial manipulator which follows a sequence of prepro g r a m m e d steps, or the Viking Lander [21] which carried out a series of operations during the periods between instructions— o r limited, as with teleoperators used for nuclear p o w e r plant o r undersea operations. Teleoperation is the study and use of manipulators which receive instructions from human operators and perform some action based o n those instructions at a remote site. Telepresence is teleoperation in which feedback of visual, tactile, auditory or other sensory information from the remote work site gives the operator the illusion of being there so that h e can exercise better or more precise control. In some instances it may be necessary to further refine the 4
above terms to take into account specific functions or tasks. For e x a m p l e . Hall and W o l b e r s (6) define supervisory and augmented control tor teleoperations while Bard [2] distin guishes various levels of automation for industrial robots. C. Alternatives
For
Example
/. Astronaut on EVA with Tools: E V A represents current technology, and hence serves as a point of reference in the comparisons. It is extremely man- and time-intensive but requires little research and development ( R & D ) . Although not considered h e r e , an interesting extension of this alternative would be a m a n - c o m p u t e r vision system. Astronauts would be equipped with TV cameras that would supply quantitative informaton on an object's size, orientation, and condition to the computer for analysis. The principal issues would concern the miniaturization of computation hardware and design of m a n - m a c h i n e interfaces. 2. Dexterous Manipulator under Human Control: Ma nipulation technology consists of a well-developed body of kinematic theory for producing any desired movement of an end effector, such as a gripper o r tool carried at the end of a robot a r m . Dexterity implies a capability to reach and grasp objects in a human m a n n e r , and to adapt to a wide number of tasks. Recently, multiple small three-jointed manipulators have been mounted on a hand to produce the equivalent of true fingers [7]. This system could probably be built with a modular design, so that vision could easily b e added; however, because extremely small manipulators for confined spaces and multiply branched manipulators for complex tasks do not yet exist, the development risk would be high. 3. Dedicated Manipulator under Computer Control: T h e Remote Manipulator System (RMS) on the Shuttle is an example of the state of the art of teleoperation technology used in existing spacecraft. Although its operations are routinely monitored visually or with T V c a m e r a s , it has only limited dexterity and n o sensory feedback. A r m control is achieved with a computer program which translates inputs into a r m motion through a conventional hand controller. A supervisory control routine has been implemented which permits the arm to follow a predetermined trajectory. This alternative may be thought of as the next generation R M S with force/torque reflection and perhaps tactile feedback. T h e major difficulty likely to be encountered in its development centers on the computer system, as will be true with the remaining alterna tives. 4. Teleoperator Maneuvering System with Manipulator Kit: This would be a remotely controlled devise with specialpurpose and multifingered end effectors, and an ability to attach itself to handles or fixtures while coordinating its activities with other subsystems. It would be much more versatile than a dedicated manipulator, possessing an on-board computer with undatable knowledge bases and built in diagnostic and fault-tolerant software. A great deal of R & D would b e required, but the payoffs in terms of productivity and technology transfer would be high. 5 . Dexterous Manipulator with Sensory Feedback: This system represents the essence of telepresence. It would start with the components of current m a s t e r - s l a v e manipulators: a 7
BARD: SPACE STATION APPLICATIONS OF AUTOMATION AND ROBOTICS control station w i t h o n e o r t w o m a s t e r a r m s ; a r e m o t e w o r k s i t e with o n e o r t w o slave a r m s geometricaly similar t o t h e m a s t e r a m r s ; a n d v i d e o feedback. It w o u l d b e e x p a n d e d , t h o u g h , t o include g r e a t e r
dexterity,
stereovision,
movable
points
111 [9] (101
of
v i e w , h i g h resolution z o n e s of focus, a s well a s force, tactile,
(Ill
and t h e r m a l feedback. V o i c e recognition will also b e c o n s i d
{12]
e r e d in t h e d e s i g n . F r o m a d e v e l o p m e n t point of v i e w , the man-machine displays,
interfaces
computer
workstation
design,
such
graphics, and
as
electronic
instrumentation
ergonomics
will
be
controls
and
engineering, of
{13]
primary
importance. [14]
ACKNOWLEDGMENT This w o r k w a s p e r f o r m e d while t h e author w a s a N A S A ASEE Summer
faculty fellow.
H e w o u l d like t o t h a n k
J.
B r o w n for suggesting the p r o b l e m p r e s e n t e d in this p a p e r , and his m a n y J o h n s o n Space C e n t e r colleagues for their helpful
(15]
c o m m e n t s a n d r e c o m m e n d a t i o n s for improving t h e a n a l y s i s . REFERENCES [1]
[2]
[3]
[4]
[5]
[6]
[7] [8J
A. Arbel and A. Seidmann, ''Performance evaluation of flexible manufactured systems," IEEE Trans. Syst., Man., Cybern., vol. SMC-14, no. 4 , pp. 606-617, 1984. J. F . Bard, " T h e evolution of robotics in manufacturing/* in Modelling and Design of Flexible Manufacturing Systems, A. Kusiak, Ed. Amsterdam, The Netherlands: Elsevier, 1986. J. F . Bard, " T h e costs and benefits of a satellite-based system for natural resource management," Socio-Economic Planning Science, vol. 18, no. 1, pp. 15-24, 1984. J. F . Bard, A. Feinberg, and W . F. Zimmerman, "Designing largescale multiattribute systems," in Handbook of Technology Manage ment, D . F . Kocaoglu, Ed. New York: Wiley. 1986. J. S. Dyer and R. F . Miles, Jr., " A n actual application of collective choice theory to the selection of trajectories for the Mariner Jupiter/ Saturn 1977 project," Operations Res., vol. 24, pp. 220-244, 1976. S. B. Hall and H. L. Wolbers, " T h e human role in space," DR-2 McDonnell Douglas Astronautics C o . , Huntington Beach, CA, Mo. Status Rep. NAS 8-35611, May 1984. J. F . Jarvis, "Robotics," Computer, vol. 17, no. 10, pp. 283-292, 1984. D . L. Keefer, "Allocation planning for R&D with uncertainty and multiple objectives," IEEE Trans. Eng. Manag., vol. EM-25, no. 1, pp. 8-14, 1978.
(16]
(17]
(18] (19]
(20] (21] (22]
(23]
R . L. Keeney and H . Raiffa, Decisions with Multiple Objectives: Preferences and Value Tradeoffs. New York: W i k y . 1976. C. W. Kirkwood and R. K. Sarin, "Ranking with partial ^formation: A method and an application/* Operations Res., vol, 3 3 , no. 1. pp. 3S-48, Jan.-Feb. 1985. I. P- Loftus, " A n historical review of NASA manned spacecraft crew stations," J. British Interplanetary Soc, 1985. G. R. Madey and Β. V. Dean, "Strategic planning for investment in R&D using decision analysis and niafJimaiical programming," IEEE Trans. Eng. Manag., vol. EM-32, no. 2 , pp. 84-90, May 1985, J. T . Malin and N . Lance, " A n expert system for fault management and automatic shutdown avoidance in a regenerative life support subsystem," Proc. Instrument Soc. Amer. First Annu. Workshop on Robotics and Expert Syst., Houston, T X , June 2 7 - 2 8 , 1985, pp. 185-193. R. H. Miller, M. L. Minsky, and D . B . S. Smith, "Space applications of automation, robotics and machine intelligence systems (AJIMIS)," prepared for the NASA Marshall Space Flight Center by Space Systems Laboratory and Artificial Intelligence Laboratory, M Î T . Cambridge. MA, Rep. NASA CR-162079, Aug. 1982. T. W. Morgan and R. L. Thurgood, "Engineering tradeoff problems viewed as multiple objective optimization and the VODCA methodol o g y , " IEEE Trans. Eng. Manag., vol. E M - 3 i , no. 2 , pp. 60-69, May 1984. NASA, "Space station reference configuration description," JSC19989 Systems Engineering and Integration Space Station Program Office, Johnson Space Center, Houston, T X . Rep. JSC-19989, Aug. 1984. NASA, "Advancing automation and robotics technology for the space station and the U.S. economy," TM-87566, Advanced Technology Advisory Committee (ATAC), Artificial Intelligence Office, Johnson Space Center, Houston, TX, Rep. TM-87566, Mar. 1985. T. L. Saaty, " A scaling method for priorities in hierarchical struc t u r e s , " J. Math. Psych., vol. 15, pp. 234-281. June 1977. T. L. Saaty, " A scenario and priorities in transport planning: application to the Sudan," Transport. Sci., vol. 1 1 , no. 3 . pp. 3 4 3 350. 1977. T. L. Saaty, The Analytic Hierarchy Process. New York: McGrawHill, 1980. G. A. Soffen, "The Viking Project,*' J. Geophys. Res., vol. 82, no. 28, pp. 3959-3970, 1977. C. C . White and A. P. Sage, " A model of multiattribute decisionmak ing and trade-off weight determination under uncertainty." IEEE Trans. Syst., Man, Cybem., vol. S C M - Î 4 . no. 2, pp. 223-229, Mar./ Apr. 1984. W . F . Zimmerman, J. F . Bard, and A. Feinberg, "Space station automation tradeoff analysis," Jet Propulsion Laboratory, Pasadena. CA, J P L Rep. 85-13, Feb. 1985.