L-Moves and Markov theorems Sofia Lambropoulou Abstract Given a knot theory (virtual, singular, knots in a 3-manifold etc.) there are deep relations between the diagrammatic knot equivalence in this theory, the braid structures and a corresponding braid equivalence. The L-moves between braids, due to their fundamental nature, may be adapted to any diagrammatic situation in order to formulate a corresponding braid equivalence. In this short paper we discuss and compare various diagrammatic set-ups and results therein, in order to draw the underlying logic relating diagrammatic isotopy, braid structures, Markov theorems and L-move analogues. Finally, we apply our conclusions to singular braids.
Keywords: Markov theorem, L-moves, conjugation, commuting, stabilization, virtuals, singulars, welded braids, mixed braids, links in 3–manifolds. Mathematics Subject Classification 2000: 57M25, 57M27, 57N10.
1
Markov equivalence and L-equivalence in S 3
The central problem in classical Knot Theory is the complete classification of knots and links up to their isotopy in three-space. Reidemeister [20] translated isotopy in space into an equivalence relation on knot diagrams in the plane, generated by the three Reidemeister moves R1, R2, R3 of Fig. 2, together with planar isotopy. From a different point of view, taking the closure of a braid, that is, joining its corresponding endpoints with simple arcs yields an oriented link, and by Alexander’s theorem [1] any oriented link in S 3 is isotopic to the closure of a braid (not unique). The set of classical braids on n strands forms the braid group Bn [2], whose generators σi are the elementary crossings between the ith and (i + 1)st strand. The basic relation in Bn , σi σi+1 σi = σi+1 σi σi+1 , is a special case of the isotopy move R3. Markov’s theorem [19], improved by Weinberg [22] with the two well-known moves (see also [4]), gives an equivalence relation in the set of all braids B∞ : Theorem 1 (Markov). Two oriented links in S 3 are isotopic if and only if any two corresponding braids differ by braid relations and the moves: (i) Conjugation in each Bn : σi−1 ασi ∼ α, (ii) Bottom stabilization in B∞ : α ∼ ασn±1 , where α ∈ Bn .
L-Moves and Markov theorems
2
braid
L under
L over
isotopy
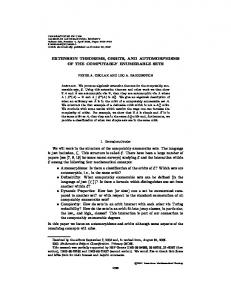
Figure 1: An L–move introduces a crossing
The Jones polynomial [9] was the first knot invariant that was constructed using braids and the Markov theorem. (Whenever we say ‘knots’ we mean both knots and links.) Among other proofs of the Markov theorem, in [16] we introduced a new type of braid move, the L-move, and we proved the following one-move theorem, sharpening the classical result. Theorem 2 (cf. [16], Thm. 2.3). Two oriented links in S 3 are isotopic if and only if any two corresponding braids differ by braid relations and L-moves. A classical L-move consists in cutting a strand of the braid and taking the two ends of the cut, the top end to the bottom of the braid and the bottom end to the top of the braid both entirely over or both entirely under the braid, creating at the same time a new pair of corresponding strands. By small braid isotopies, an L-move is equivalent to adding an in-box crossing. So, the L-move generalizes the stabilization move. Fig. 1 illustrates abstractly various instances of L-moves. (Since the L-moves may adapt to other diagrammatic set-ups, the black disc inside the braid box indicates other types of crossings, e.g. singular, and the thicker strands may stand for a knot complement or a c.c.o. 3-manifold or a handlebody, see below.) Closing the pair of strands of an L-move yields a kink in the diagram, so it corresponds to planar isotopy or to the isotopy move R1. Theorems 1 and 2 imply that braid conjugation follows from the L-moves (see also Fig. 5 below). Theorem 2 has two main advantages: First, there is only one type of braid move. Second, the L-moves are very local and fundamental. Thus, adapted every time to a given diagrammatic set-up (where diagrammatic isotopy is given and the notion of a braid can be defined), they may provide a uniform ground for formulating and proving a corresponding braid equivalence. Moreover, due to the fact that an L-move has a nice algebraic expression (by pulling it out of the braid box, cf. [16], Remark 2.2), these geometric analogues of the Markov theorem can be turned into algebraic statements, according to the braid structures of the given situation (which depend on the diagrammatic equivalence) and the manifold where the knots live. Indeed, in [16] we first proved a Relative Version of Theorem 2 ([16], Thm. 4.7) concerning a fixed braided portion in the knot. Using this we proved L-move analogues of the Markov theorem for links in knot complements and for links in an arbitrary c.c.o. 3-manifold (cf. [16], Thms. 5.5 and 5.10). These results were turned into
L-Moves and Markov theorems
3
algebraic statements in [17], Thms. 4 and 5. The Relative Version of Theorem 2 lead also to an L-move equivalence as well as to algebraic analogues of Markov’s theorem for knots in a handlebody (cf. [8], Thms. 3, 4 and 5). In a further development, similar results were proved in [14] for virtual knots (cf. Thms. 2 and 3), for flat virtuals (cf. Thms. 4 and 5), for welded knots (cf. Thms. 6 and 7) and for unrestricted virtuals (cf. Thm. 8). In this paper we shall discuss and compare various diagrammatic set-ups and results therein, in order to draw the underlying logic relating diagrammatic isotopy and braid structures, and to be able to guess statements for Markov theorems and L-move analogues. Finally, we apply our conclusions to singular knots and singular braids. We begin by revising the two moves of Theorem 1. Conjugation is clearly b related to an isotopy moves R2 occuring in the back side of a closed braid β. Opening βb with a cutting line, this line will either put both crossings of the move at the same side of the braid (and then the initial R2 move becomes a braid cancellation, due to the fact that σi has an inverse) or it will separate the two crossings, one at the top and one at the bottom of the braid, yielding a conjugate of β. Even simpler, a cutting line of a closed braid may cut before or after a crossing σi , yielding the braid equivalence move: ασi ∼ σi α. This move is here equivalent to conjugation. Regarding the bottom stabilization we just note that the braid move α1 α2 ∼ α1 σn±1 α2 together with move (i) implies bottom stabilization. Stabilization is related to the isotopy move R1, since the closure of a braid with a stabilization move is a knot with a kink at that place.
2
Other diagrammatic set-ups
Before discussing braid equivalence in more general settings let us first recall briefly the various diagrammatic set-ups we consider in this paper. Virtuals, Flat Virtuals, Welded and Singulars. Virtual knot theory was introduced by Kauffman [12] and it is an extension of classical diagrammatic knot theory. In this extension one adds a virtual crossing that is neither an over-crossing nor an under-crossing. Virtual isotopy generalizes the ordinary Reidemeister moves for classical links and is generated by planar isotopy and the moves R1, R2, R3, V1, V2, V3 and V4 of Fig. 2, the last one being the key move in the theory. Moves like F1 and F2 with two real crossings and one virtual crossing inside the shaded disc are forbidden in virtual knot theory. The virtual braid group V Bn is generated by the classical crossings and the virtual crossings vi , satisfying vi2 = 1 and relations that are the braid versions of the virtual isotopy moves (except, of course, R1 and V1). A flat virtual knot is like a virtual knot but without the extra under/over structure at the real crossings. Instead we have shadow crossings [21], the flat crossings. The study of flat virtual knots and links was initiated in [12]. The isotopy moves and the two forbidden moves in virtual knot theory are completely analogous for the flat virtual setting. In the flat virtual braid group on n strands
L-Moves and Markov theorems
S1
F1
4
R1
V1
R2
V2
R3
V3
V4
S2
F2
F3
Figure 2: Diagrammatic moves for virtual, welded, singular and classical knots
the generators are the virtual crossings vi and the flat crossings ci , such that c2i = 1. The mixed relation vi ci+1 vi = vi+1 ci vi+1 is not symmetric. Welded braids were introduced in [6]. Welded knots satisfy the same isotopy relations as the virtuals, but for welded knots one of the two forbidden moves of Fig. 2 is allowed, the move F1, which contains an over arc and one virtual crossing. The welded braid group on n strands is a quotient of the virtual braid group, so it can be presented with the same generators and relations, with the additional relations: vi σi+1 σi = σi+1 σi vi+1 (F1). Singular knots are related to Vassiliev’s theory of knot invariants. In singular knot theory isotopy is generated by planar isotopy, by the moves R1, R2, R3, S1, S2 and by the moves F1 and F2, where in the shaded disc a singular crossing is placed. Move F3 and move R1 with a singular crossing placed in the shaded disc are forbidden in this theory, see [11]. The singular crossings τi generate together with the real crossings σi the singular braid monoid SBn [3, 5], satisfying relations analogous to the braid versions of the singular isotopy relations. b be a Knots in Handlebodies, Knot Complements, 3-manifolds. Let B b Then closed braid and let L be an oriented link in the knot complement S 3 \B. b S L, with the manifold L may be represented uniquely in S 3 by a mixed link B
L-Moves and Markov theorems
5
...
... ... ...
... ...
...
... ... ...
... ...
...
uo
u
B
Figure 3: Mixed links, a geometric mixed braid and an algebraic mixed braid
1
i m
... ... a
= i
1 m 1
n
1
... j
= ...
j
...
j+1 n
...
Figure 4: The mixed braid generators ai and σj
b remaining fixed throughout. Analogous set-up we have for links in subbraid B a handlebody S of genus m. Here a link L is represented uniquely by a mixed tangle Im L, where Im is the identity braid on m (infinitely extended) strands. Fig. 3 illustrates a link in the complement of the Hopf link and the same link in a handlebody of genus 3. Moreover, two links are isotopic in the manifold if and only if the corresponding mixed links are isotopic in S 3 (see [16, 8] for details). Mixed link isotopy is generated by the ordinary Reidemeister moves for the link part and by moves R2, R3 involving also the manifold part. For the b resulting by doing surgery case of a link L in the c.c.o. 3-manifold χ(S 3 , B), b we have similar set-up and reasoning, only that we add in the isotopy along B, a handle-sliding move. b S L may be isotoped to the closure of a geometric mixed braid AS mixed link B S B β. In the case of a handlebody the closure of a mixed braid Im β is realized by closing only the link part, indicating at the same time whether the simple closing arc will pass all way over or all way under the mixed braid. Geometric mixed braids may be represented by algebraic mixed braids, in which the two sets of strands S are separated and the manifold part is the identity braid (the braid B of B β has been combed away), cf. [17]. View Fig. 3 for a geometric mixed braid in a handlebody and for an algebraic mixed braid. Thus, the braid groups Bm,n , which contain braids on m + n strands with the first m strands forming the identity braid Im , are the braid structures related to all the above spaces, cf. [15]. They are generated by the classical crossings σj and by the ‘loops’ ai as illustrated in Fig. 4.
L-Moves and Markov theorems
3
6
Braid equivalences
Consider now a general setting. In [13] we gave a braiding algorithm, which is applicable to all the categories in which braids are defined. Let Bn denote the set of braids with n strands in a given diagrammatic knot theory and let B∞ := ∪n Bn . Let also α, α1 , α2 ∈ Bn and let xi some braid generator in Bn , with xn ∈ Bn+1 . There are braid structures where some generators do not have inverses (e.g. the singular crossings τi in singular knot theory), so move (i) cannot appear in the braid statement. Yet, a cutting line is permitted to cut before or after a braid generator xi . For this reason we will adopt the following more general move, which is equivalent to conjugation if xi has an inverse. (iii) Commuting in Bn : αxi ∼ xi α. In most diagrammatic situations commutings (even conjugations) are permitted. For example, in the virtual or welded or flat virtual knot theory all conjugations are allowed in the braid equivalence, while in the singular knot theory all commutings are allowed (conjugation only for real crossings). Similarly, in the knot theory of the solid torus all conjugations are allowed. But there are also situations where a braid generator, even if it has an inverse, cannot be commuted, because the cutting line of the closure cannot cut anywhere. For example, the loop generators ai in a handlebody of genus g ≥ 2 (see below). Then, such commutings will not appear in a braid equivalence of the theory: neither in an L-equivalence nor in an algebraic equivalence. Furthermore, for the same reason (not commuting of some braid generators) we will adopt the more general stabilization: (iv) Stabilization in B∞ : α1 α2 ∼ α1 x±1 n α2 . Stabilization by a real crossing may occur in all the above-mentioned knot theories. This is because the isotopy move R1 is permitted in all these theories. Similarly, stabilization by a virtual crossing may occur in virtual, flat virtual and welded braids, corresponding to the isotopy move V1. Stabilization by a singular crossing is not permitted in singular braids (due to the absence of the corresponding move in the theory), neither does stabilization by the loops ai in handlebodies, knot complements and c.c.o. 3-manifolds make sense. Surprisingly, conjugation (not commuting) by a braid generator may sometimes be achieved simply by L-moves within the braid, without having to change the position of the cutting line. For example, for a real crossing in classical and singular knot theory, as well as in handlebodies, knot complements and c.c.o. 3-manifolds, for the loop generator in the solid torus or for a virtual crossing in virtual and flat virtual knot theory. Then, these conjugations will not appear in the L-move statement of the theory, but they will appear in the algebraic braid equivalence. As a versatile example, Fig. 5 illustrates abstractly real conjugation as a composition of L-moves. The black disc inside the braid box indicates the possible existence of singular crossings. The thicker braid may represent a handlebody, a knot complement or a c.c.o. 3-manifold. This diagrammatic
L-Moves and Markov theorems
1
...
m 1 j j+1 n
...
...
Lo
... B
B
...
1
...
...
...
m 1
7
n
1
~
... B
m 1
n
1
...
n
m 1
undo
Lo
...
B
...
Figure 5: Conjugation by a real crossing as a composition of L–moves
o
u k
k
Figure 6: Causing conjugation by a loop ai
proof is essentially due to H¨aring-Oldenburg and it will also work for the loop generator in the solid torus as well as for virtual crossings and virtual L-moves. It will not work for a loop generator ai in the three types of spaces we consider neither for real crossings in virtual knot theory (and certainly not for singular crossings). Another comment is due. As we said, the basic difference between the handlebody and a knot complement lies in the way we form the closure of a mixed braid. The choices involved in the handlebody correspond to crossing a hypothetical arc k at the point at infinity (in Fig. 6 at the back side of the braid). In the case of classical links or links in knot complements or c.c.o. 3-manifolds this is allowed. In the case of a handlebody it is not allowed. On the braid group level, crossing the arc k corresponds to conjugation by a loop ai , see [8, 17]. That’s why this conjugation is not permitted for handlebodies. Regarding the L-moves, in all diagrammatic set-ups we consider here, an L-move can be easily shown to follow from stabilization and conjugation. We shall, now, explain how to look for the different types of L-moves needed in a given knot theory. The interpretation of an L-move as introducing an in-box crossing is very important in this search and this, in turn, is related to the types of kinks allowed in the diagrammatic isotopy. (This interpretation of an L-move is also essential for moving from a geometric L-move statement to an algebraic statement of the braid equivalence.) In handlebodies, knot complements and c.c.o. 3-manifolds there is only one type of L-move, applied only on the link subbraid, not the manifold subbraid:
L-Moves and Markov theorems
8
Figure 7: The three main types of virtual L-moves
introducing a real in-box crossing and the two strands running over or under the rest of the braid, as in Fig. 1. In the singular domain, where a real kink is allowed (move R1) but not a singular one, there is also only one type of L-move: introducing a real in-box crossing, see Fig. 1. The strands of the L-move may run both over or both under the rest of the braid, but they may not form any singular crossings with the other strands, as, then, the closure will not contract to a kink. In virtuals, where both real and virtual kinks are permitted in the isotopy (moves R1 and V1) we have L-moves introducing a real or a virtual crossing. Because of the presence of the forbidden moves (moves F1 and F2): (a) the strands of an L-move cross the other strands of the braid only virtually. (b) We have a third type of L-move, the threaded L-move, coming from a ‘trapped’ virtual kink. (c) L-moves facing the right may be different from L-moves facing the left, cf. [14]. In Fig. 7 we illustrate the three main types of virtual L-moves. Obvious analogues of these L-moves are needed for the flat virtuals and for welded braids. In the case of welded, where there is only one forbidden move, the threaded type of L-moves follows from the others. For details see [14].
Conclusions • For the L-move theorem for virtuals [14] we need the moves: (i) Real conjugation in V Bn , (ii) Right virtual L-moves, (iii) Right real L-moves, (iv) Right and left under-threaded L-moves. For an algebraic statement ([14], see also [10]) replace moves (ii) and (iii) by virtual conjugation and right virtual and real stabilization in V B∞ . The statements for flat virtual braid equivalence are completely analogous, whilst for welded, move (iv) is not needed. • For the L-move theorem for handlebodies, knot complements, c.c.o. 3-manifolds [8, 16] we need L-moves that do not touch the manifold subbraid. For c.c.o. 3-manifolds we need to add braid sliding moves. For an algebraic statement [8, 17] replace the L-moves by real conjugation and real stabilization. For knot
L-Moves and Markov theorems
9
complements add twisted loop conjugation, a move resulting from combing the loop ai through the manifold subbraid. For c.c.o. 3-manifolds add twisted loop conjugation as well as braid sliding moves. • We conclude with the case of singulars. In the discussions above we guessed the L-moves needed for a singular braid equivalence: L-moves with the two strands crossing the rest of the braid only with real crossings, all over or all under. Moreover, such L-moves can achieve conjugation (and thus commuting) by a real crossing but they cannot achieve commuting by a singular crossing, which is obviously allowed in the theory. So, we have the following. Theorem 3 (L-move theorem for singulars). Two oriented singular links are isotopic if and only if any two corresponding singular braids differ by braid relations in SB∞ and a finite sequence of the following moves: (i) Singular commuting: τi α ∼ ατi , (ii) Real L-moves. Proof. An L-move between singular braids follows from real conjugation and real stabilization (see this by pulling the strands of the L-move out of the braid box and using real conjugation). Conversely, stabililization by a real crossing is a special case of an L-move, and real conjugation can be realized by L-moves (recall Fig. 5). So, the two moves in our statement generate in SB∞ the same equivalence relation as the moves: (i) Singular commuting: τi α ∼ ατi , (ii) Real conjugation: σi−1 ασi ∼ α, (iii) Real stabilization: α1 α2 ∼ α1 σn±1 α2 . These algebraic moves give rise to the Markov equivalence for singulars and this is proved by Gemein in [7]. Remark 1. All the issues treated in this paper are expanded, discussed thoroughly and proved in detail in the author’s monograph [18].
References [1] J.W. Alexander, A lemma on systems of knotted curves, Proc. Nat. Acad. Sci. U.S.A. 9 (1923) 93–95. [2] E. Artin, Theorie der Z¨opfe, Abh. Math. Sem. Hamburg Univ. 4 (1926) 47–72. [3] J. Baez, Link invariants and perturbation theory, Lett. Math. Phys. 2 (1992) 43–51. [4] J.S. Birman, Braids, links and mapping class groups, Annals of Mathematics Studies, Vol. 82 (Princeton University Press, Princeton, 1974). [5] J. Birman, New points of view in knot theory, Bull. Amer. Math. Soc. (N.S.) 28(2) (1993) 253–287.
L-Moves and Markov theorems
10
[6] R. Fenn, R. Rimanyi, C.P. Rourke, The braid permutation group, Topology 36 (1997) 123–135. [7] B. Gemein, Singular braids and Markov’s theorem, J. Knot Theory Ramifications 6(4) (1997) 441–454. [8] R. H¨aring-Oldenburg, S. Lambropoulou, Knot theory in handlebodies, J. Knot Theory Ramifications 11(6) (2002) 921–943. [9] V. F. R. Jones, Hecke algebra representations of braid groups and link polynomials, Annals of Math. 126 (1987) 335–388. [10] S. Kamada, Braid representation of virtual knots and welded knots, Osaka J. Math. 44 (2007), no. 2, 441–458. See also arXiv:math.GT/0008092. [11] L. H. Kauffman, Invariants of graphs in three-space, Trans. Amer. Math. Soc. 311(2) (1989) 697–710. [12] L. H. Kauffman, Virtual Knot Theory, European J. Comb. 20 (1999) 663– 690. [13] L. H. Kauffman and S. Lambropoulou, Virtual Braids, Fundamenta Mathematicae 184 (2004) 159–186. [14] L. H. Kauffman and S. Lambropoulou, Virtual Braids and the L-Move, J. Knot Theory Ramifications 15(6) (2006) 773–811. [15] S. Lambropoulou, Braid structures in handlebodies, knot complements and 3-manifolds, in Proceedings of Knots in Hellas ’98, Series on Knots and Everything Vol. 24 (World Scientific, 2000), pp. 274–289. [16] S. Lambropoulou and C. P. Rourke, Markov’s Theorem in three–Manifolds, Topology and its Applications 78 (1997) 95–122. [17] S. Lambropoulou and C. P. Rourke, Algebraic Markov equivalence for links in 3-manifolds, Compositio Math. 142 (2006) 1039–1062. [18] S. Lambropoulou, “Braid structures and braid equivalence in different manifolds and in different settings”, World Scientific, Series on Knots and Everything, in preparation. ¨ ¨ [19] A.A. Markov, Uber die freie Aquivalenz der geschlossenen Z¨opfe, Recueil Math´ematique Moscou 1(43) (1936) 73–78. [20] K. Reidemeister, Elementare Begr¨ undung der Knotentheorie, Abh. Math. Sem. Hamburg Univ. 5 (1927) 24–32. [21] V. Turaev, Virtual strings, Ann. Inst. Fourier (Grenoble) 54(7) (2004) 2455–2525. [22] N. Weinberg, Sur l’ equivalence libre des tresses ferm´ee, Comptes Rendus (Doklady) de l’ Acad´emie des Sciences de l’ URSS 23(3) (1939) 215–216.
L-Moves and Markov theorems
11
S. Lambropoulou: Department of Mathematics, National Technical University of Athens, Zografou campus, GR-157 80 Athens, Greece. E-mail:
[email protected]
URL: http://www.math.ntua.gr/˜sofia/