Int. J. Industrial Electronics and Drives, Vol. 1, No. 2, 2014
73
Matrix converter for static synchronous series compensator using cooperative bacteria foraging optimisation Ehab H.E. Bayoumi Department of Electrical and Electronics Engineering Technology, Abu Dhabi Men’s College (ADMC), Higher Colleges of Technology, P.O. Box 25035, Abu Dhabi, UAE E-mail:
[email protected] Abstract: Static synchronous series compensator (SSSC) is utilised for power flow control and reactive power compensation in transmission lines. In this paper, a new configuration of SSSC based on matrix converter is presented. The proposed SSSC has various advantages over traditional one. It is recognised by bi-directional power flow control capability, elimination of the DC-link, fast dynamic response and simple control system. Using the introduced switching algorithm for ac/ac matrix converter, an approximately sinusoidal series compensation voltage is injected to transmission line with low total harmonic distortion. The optimal parameters of power flow controller are achieved by using cooperative bacterial foraging optimisation. The proposed SSSC is tested at different operating condition by using MATLAB/Simulink software. Results show that the designed control strategy with the new SSSC topology is robust against sudden changes in active and reactive power flow. As well as, it copes significantly with symmetrical and asymmetrical faults conditions. Finally, measurements of system performance validate the proposed technique and emphasise its feasibility. Keywords: static synchronous series compensator; SSSC; matrix converter; AC-AC converter; cooperative bacterial foraging optimisation; CBFO; FACTS devices. Reference to this paper should be made as follows: Bayoumi, E.H.E. (2014) ‘Matrix converter for static synchronous series compensator using cooperative bacteria foraging optimisation’, Int. J. Industrial Electronics and Drives, Vol. 1, No. 2, pp.73–81. Biographical notes: Ehab H.E. Bayoumi obtained his BS from the Helwan University and a MS from the Ain Shams University, Egypt in 1988 and 1996, respectively. He earned his PhD degree from the Cairo University, Egypt in collaboration with Lappeenranta University of Technology (LUT), Finland in 2001. He has been with Electronic Research Institute (ERI) Egypt since 1990. From 2000 to 2001, he joined LUT, Finland as a Visiting Researcher. He was appointed as an Assistant Professor at the Chalmers University of Technology (CTH), Sweden from 2003 to 2005. He is a Professor at the ERI, Egypt, and currently on leave to Abu Dhabi Men’s College (ADMC), UAE. His research interests include high performance AC machines, power quality, switching power converters, DSP-based control applications, and non-linear control applications in power electronics and electric drive systems.
1
Introduction
In the last decade, flexible AC transmission system (FACTS) devices have been progressively developed for controlling power flow in a power transmission system, improving the transient stability, damping power system oscillations and providing voltage stability using high power semiconductor technology-based inverters connected to the electric power grid (Park et al., 2003). FACTS devices can be broadly classified as line- and self-commutated attending to the nature of the power semiconductor devices. The first group includes devices based on thyristor technology that operate under phase control in order to injecting a controllable reactive power. The static VAR compensator (SVC) and thyristor controlled series compensator (TCSC)
Copyright © 2014 Inderscience Enterprises Ltd.
are shunt and series topologies respectively that can be included in this group. On the other hand, self-commutated FACTS devices based on gate turn-off switches such as the GTO, IGBT or IGCT generate ac voltages and currents with controllable magnitude and phase angle through a voltage source converter with DC-link. The static compensator (STATCOM), the static synchronous series compensator (SSSC), the unified power flow controller (UPFC) and the interline power flow controller (IPFC) are well known shunt, series, shunt-series, and series-series topologies respectively in this group. These arrangements have been proposed and demonstrated in the field of power flow control in transmission networks (Lee and Chu, 2004). However, using a DC-link as a buffer for interconnecting two ac systems is not mandatory in spite of
74
E.H.E. Bayoumi
all the aforementioned topologies mentioned in the above paragraph (Mancilla-David et al., 2008; Bayoumi et al., 2001). To overcome this problem a converter with the ability of AC-AC conversion without DC-link is required to eliminate the energy storage elements. The converter with this characteristic is called matrix converter (MC). Unlike classical rectifier-inverter systems this converter presents a solution for AC-AC conversion is a direct AC/AC frequency converter which does not require any energy storage element. It can be designed as an integrated package with fast response, high efficiency and small size (Babaei and Kangarlu, 2009). Since there is no decoupling reactive element in a MC, the output voltage and input current are made directly from the known input voltage and output current (Hojabri et al., 2011). A MC delivers the following advantages: •
sinusoidal input and output current waveforms
•
controllable input power factor
•
four quadrants operation
•
high reliability and long life due to the absence of bulky electrolytic capacitors
•
smaller and simple design than other regeneration inverters with same power ratings (Nguyen et al., 2011).
Several modulation techniques have been proposed in the literature (Alesina and Venturini, 1981, 1989; Tadano et al., 2007; Klumpner et al., 2006). However, it seems that each method uses some of the features of MCs, and therefore, each one has its own advantages and constraints. The SSSC is one of the most commonly used FACTS devices to control active and reactive power flow in transmission line, and power system damping. The DC capacitor as an energy storage element is a bulky problem due to its size and maintenance desired. In this paper, a new configuration of SSSC based on PWM-based MC has been presented to control active and reactive power flow in transmission line. Main advantages of this topology are elimination of DC-link, active and reactive power flow control simultaneously, simplicity of control system, small amounts of output passive filter elements and fast operation in various condition. To achieve the mentioned advantages a proper control system is requirement. To obtain the optimal parameters of power flow controller the cooperative bacterial foraging optimisation (CBFO) is used. The proposed SSSC is simulated using MATLAB/Simulink software. Results indicate satisfactorily performance of the novel configuration of SSSC in normally operation and during symmetrical and asymmetrical fault conditions.
2
Matrix converter SSSC
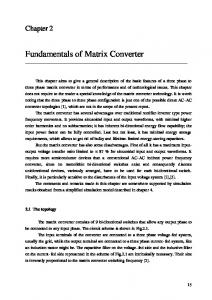
Figure 1(a) shows the traditional SSSC without energy source in DC-link. Due to the existence of capacitor in DClink side, therefore only reactive power can be controlled by this topology. Figure 1(b) shows a SSSC with a rectifier in DC side. In this structure, rectifier acts as an energy source and consequently SSSC controls active and reactive power flow of transmission line simultaneously. The power converter stage in this structure of SSSC is definitely an indirect AC-AC power conversion, which implies the possible drawbacks such as more number of power semiconductor devices, more losses, less efficiency compared to a direct AC-AC power conversion. Also, the DC capacitor as an energy storage element is a bulky problem due to its size and maintenance desired (Bayoumi et al., 2002). To overcome these drawbacks, a MC can be considered as a direct power conversion stage. Figure 2(a) shows the configuration of the proposed SSSC with PWM AC-AC converters. In this configuration, PWM AC-AC converter injects the required voltage, Vinj, to the transmission line. It can be seen from this figure that the input of AC-AC converter is connected to same transmission line. In this paper a three-phase to three-phase MC is utilised to realise a SSSC as shown in Figure 2(a). Bi-directional switches are implemented by common emitter back to back IGBT and diode switch cells. Figure 1
(a) Traditional SSSC without energy source in DC-link (b) SSSC with a rectifier in DC side
(a)
(b)
Matrix converter for static synchronous series compensator using cooperative bacteria foraging optimisation Figure 2
Qr = Vdr I qr − Vqr I dr
(a) SSSC based on PWM direct AC-AC converter (b) structure of direct MC
75 (4)
where Pr, Qr are active and reactive power of receiving end side respectively , and Vr, Ir are receiving voltage and current respectively, P is the park’s transformation. To control active and reactive power, MC injects a voltage to transmission line and control the voltage of Vs2 as follow: Vs 2 = Vs + Vinj
(5)
Because of elimination of DC-link, phase and magnitude of Vs2 are controllable with Vinj and then active and reactive powers can be controlled simultaneously. The block diagram of the control circuit for MC used in the proposed SSSC structure has been illustrated in Figure 3. In this approach, the errors of active and reactive power are applied to PI controller and finally the references of injected voltages of MC are achieved.
(a)
Figure 3
Power flow controlling system
(b)
The proposed MC is directly connected to the source and its produced voltage which is injected to the grid through threephase transformers. This transformer prevents the phases to be short-circuited, because MCs connect the input voltages to output, directly. Also, SSSCs correct operation range varies transformer turns ratio. Figure 2(b) shows structure of nine switches three-phase to three-phase direct MC, in this structure all of the switches are bi-directional. There are several applicable arrangements to create a bi-directional switch. In this paper, the common emitter topology has been used in the proposed SSSC. Voltages Vsa, Vsb, Vsc are input voltage of MC that in the proposed SSSC are taken from power system, and voltages Vinja, Vinjb, Vinjc are controllable output voltages of MC. These voltages are injected to transmission line as series via a coupling transformer. Therefore, the magnitude and angle of Vs2 are controlled and consequently the active and reactive power flows in transmission line are controlled. Considering Figure 2(a), the power flow equations of system can be expressed as follows: ⎡Vdr ⎤ ⎡Var ⎤ ⎢V ⎥ = P ⎢V ⎥ ⎢ qr ⎥ ⎢ br ⎥ ⎢⎣V0 r ⎥⎦ ⎢⎣Vcr ⎥⎦
(1)
When the references of injected voltages of MC have been obtained by this control strategy, the MC has to generate these voltages by each modulation methods to have a desired transmission active and reactive power flow in transmission line. Due to power system non-linearity, designing controller parameters is hard to design and time consumed process to be calculated and then tuned using the traditional control theory. To obtain the optimal values of PI controller parameters the CBFO algorithm is used. More description about optimisation methods are given in Bayoumi (2010, 2012) and Bayoumi and Salem (2012).
3
Controller design
To achieve an optimal combination, this paper employs CBFO to improve optimisation synthesis and find the global optimum value of fitness function. The integral of time multiplied absolute value of the error (ITAE) is taken as the objective function in this technique. The objective function is defined as follows: ts
J=
∫( P
ref
− Pr + Qref − Qr ) t dt
(6)
0
⎡ I dr ⎤ ⎡ I ar ⎤ ⎢I ⎥ = P ⎢I ⎥ ⎢ qr ⎥ ⎢ br ⎥ ⎢⎣ I 0 r ⎥⎦ ⎢⎣ I cr ⎥⎦
(2)
Pr = Vdr I dr + Vqr I qr
(3)
F=
Ns
∑J
i
(7)
i =1
In equations (6) and (7) ts is the simulation time and Ns is the total number of operating points for which the optimisation is carried out. For objective function
E.H.E. Bayoumi
76
calculation, the time-domain simulation of the test power system is carried out for the simulation period. The main purpose is to optimise this objective function in order to improve the system response in terms of the settling time, rise time and overshoots. The design problem can be formulated as the following constrained optimisation problem, where the constraints are the controller parameters bounds: Minimise J subject to:
K pmin ≤ K p ≤ K pmax K imin ≤ K i ≤ K imax
RUN; REPRODUCTION; ELIMINATION & DISPERSAL; End for End for PASS the best found solutions of each bacterium to stage 2; Stage 2: the multi-colony cooperative BFO algorithm using explicit space decomposition REINITIALISE: bacteria positions from the best found solutions and the associate
(8)
run length unit CS. SPLIT the whole population into n/2 separate colonies of 2D vectors;
3.1 Cooperative BFO
For (each chemotactic step t = 1: N cs 2 )
To improve the performance of the original BFO algorithm the CBFO is introduced (Shao and Chen, 2009), which has a significant improvement in terms of convergence speed, accuracy and robustness. It can be classified into CBFO-S and CBFO-H, in which, CBFO-S is the serial heterogeneous cooperation on the implicit space decomposition level and CBFO-H is the serial heterogeneous cooperation on the hybrid space decomposition level (Alavandar et al., 2010).
For (each colony j = 1: n / 2) For (each bacterium i = 1: S) TUMBLE; RUN; REPRODUCTION; ELIMINATION & DISPERSAL; End for
3.1.1 The CBFO-H algorithm The CBFO-H algorithm consists of two search stages working in a serial fashion. The first stage, which applied the original BFO model with a large run-length unit parameter CL, runs for a number of iterations to locate promising regions that including the global optimum. Then the algorithm passes the best found solutions to the next stage. The second stage reinitialises the bacteria colony in these best-so-far positions with a smaller run-length unit parameter CS and applies the explicit space decomposition cooperative approach to the BFO. This approach relies on splitting the search space (n-dimensional vector) into n / 2 subspaces (which is two-dimensional vector), where each subspace is optimised by a separate bacteria colony. The overall solution is the vector combining the best bacterium of each colony. This algorithm works by sequentially passing over the colonies: to evolve all the bacteria in colony j, the other n / 2 – 1 components in the overall solution are kept constant (with their values set to the global best bacteria from the other n / 2 – 1 colonies); then the jth colony evolves and replace the jth component of the overall solution by its best bacterium. Table 1
The pseudocode of CBFO-H
The pseudocode of CBFO-H Stage 1: the original BFO algorithm INITIALISE: the position and the associated run-length unit CL of the bacteria colony; For (each chemotactic step t = 1: N cs1 ) For (each bacterium i = 1: S) TUMBLE;
UPDATE the best bacterium replace the jth component of the overall solution; End for EVOLUTION: Evolution is added to run-length unit by: If (t mod β = 0)
// β is user-defined constant.
C(t+1) = C(t)/α;
// α is user-defined constant.
End if End for
The pseudocode of CBFO-H is described in Table 1 where N cs1 and N cs 2 represent the number of chemotactic steps in stages 1 and 2 respectively, and α > 1 is a user-defined constant that is used to decrease the run-length unit C.
4
Control strategy of MC
PWM technique alters the duty cycle of switches at the high switching frequency for attaining output voltage and current at the low frequency. By using this method, the desired sinusoidal voltage is generated by sampled pieces of the input voltages (Babaei, 2012; Fort et al., 2012; Dujic et al., 2009; Cruz et al., 2009). PWM-based control strategy has been used in the proposed system is as follow: First, voltages Vsa, Vsb, Vsc are compared with each other and this comparison leads to each period of the input voltage are divided to six equal areas (each area with 60 degree). The reason of choosing each area equal to 60 degree is that the peak equation of voltages is constant as shown in Figure 4(a). In this modulation method to generate
Matrix converter for static synchronous series compensator using cooperative bacteria foraging optimisation desired output voltage, switching period (Ts = 1 / fs), has been divided to two time intervals tmax and tmin in each sampling period as follows: j j Ts j = tmax + tmin
(9)
where j is number of sampling period, and tmax, tmin are calculated so that the desired output voltage is created. During the time interval tmax, the maximum peak of input voltage (vmax(t)) will be transferred to the output and during the time interval tmin, the minimum peak of input voltage (vmin(t)) will be transferred to the output as shown in Figure 4(a) to Figure 4(b). This process will be iterated for the rest of sampling periods (Babaei and Kangarlu, 2009). Figure 4
(a) Peak equation of voltage vmax(t), vmin(t) (b) Output voltage for proposed switching method
77
Equations (11) and (12) can be rewritten for each phase of output voltage. Therefore, MC can be controlled independently for each phase and generated various voltages in each phase of output. In addition, the desired output voltage can be generated even under unbalanced input voltages.
5
Simulation result
The proposed SSSC configuration based on MC is simulated using MATLAB/Simulink software. The simulated power system circuit diagram and its parameters are given in Figure 5 and Table 3 respectively. Figure 5
Power system circuit diagram
(a)
(b)
The general relations of vmax(t) and vmin(t) in each sample time can be defined as follows: vmax (t ) = Vmax sin (ωi t + θ max ) vmin (t ) = Vmax sin (ωi t + θ min )
(10)
where Vmax, θmax and θmin denote the peak value and phases of vmax(t) and vmin(t), respectively. Assuming high switching frequency (fs >> fi and fs >> fo) the average of the output voltage can be written as below:
vout (t ) =
j j tmax vmax (t ) + tmin vmin (t ) Ts
(11)
Considering equation (11), the combination of vmax(t) and vmin(t) during time intervals tmax and tmin can generate the desired output voltage. In this method to generate desired fundamental output voltage, tmax, tmin has been calculated as equation (12). tmax = tmin
Ts ( vout − ref (t ) − vmin (t ) )
vmax (t ) − vmin (t ) = Ts − tmax
(12)
Figure 6 shows the convergence rate of objective function that has been optimised by CBFO algorithm. The final settings of the optimal parameters for the proposed controllers are given in Table 2. Initial values of receiving end active and reactive powers are set to Pr = 50 MW, Qr = 30 MVAR respectively. As shown in Figure 7, at t = 0.3 s the mentioned active and reactive powers are changed to Pr = −20 MW, Qr = –10 MVAR, and at t = 0.5 s active power has been changed to Pr = 20 MW but reactive power has been kept in previous value. At t = 0.6 s active power has been kept in Pr = 20 MW but reactive power has been changed to Qr = 20 MVAR. A negative power flow indicates the reversal of power flow in the line. It is clear from Figure 7 that power flow control and reversal of active and reactive powers of receiving and sending end can also be achieved using the proposed SSSC. The control system does not allow these disturbances sustained, and damped them immediately. Therefore, it can be seen from Figure 6 that the calculated controller parameters by presented CBFO are optimal values and consequently follow the references of active and reactive power in different operating points. The optimal controllers’ parameters for active and reactive power by using the CBFO are given in Table 3. Figure 8 shows injected voltage of MC. In Figure 8(a) the injected voltage during all test time is given, In Figure 8(b) the injected voltage during normal condition is demonstrated, and In Figure 8(c) the injected voltage is shown during transient condition. Figure 9(b) illustrates injected series voltage of MC in normally conditions, as shown in this figure, novel SSSC can inject an almost sinusoidal series voltage with a low total harmonic distortion (THD) without using output AC filters. The line
78
E.H.E. Bayoumi
currents of the proposed system is given in Figure 10(a) during current reversal (Pr = –20 MW, and Qr = –10 MVAR) at t = 0.3 s. In Figure 10(b) FFT analysis for the line current is introduced. It confirm that the line current is sinusoidal with THD = 2.07% (too low). Table 2
Values
Sending voltage (kV rms)
110 ∠ 10º
Receiving voltage (kV rms)
110 ∠ 0º 50 10 10
System frequency (Hz) Switching frequency of matrix converter (kHz) Series resistance of line (Ω)
Table 3
(a)
25
Series reactance of line (Ω) Turn ratio of isolation transformer
1
The optimal controllers’ parameters using BFO
Controller parameters
Figure 6
Injected voltage of MC, (a) at the whole test time (b) during normal condition (c) during transient condition
System main parameters
Main parameters
Kp Ki
Figure 8
Active power (P) controller
Reactive power (Q) controller
178.4 1.79
211.3 2.19
(b)
Objective function against number of iterations using CBFO
(c)
Figure 7
The receiving end, (a) active power (b) reactive power (see online version for colours)
(a)
(b)
As shown in Figure 7(a), at t = 0.3 s when active and reactive power are changed, injected voltage of MC is changed as a results of this variations, also this process is repeated at t = 0.5 s and t = 0.6 s by changing active power and reactive power respectively. Changing injection voltage is performed by changing tmax and tmin as described in previous section. Figure 9(a) shows the RMS value of injected voltage. It can be obvious from this figure that the RMS value of injected voltage changes according to changing the active and reactive power references. Figure 9(b) indicate frequency spectrum of injected voltage of MC, as shown in this figure fundamental voltage (reference voltage) has been generated, and other harmonic orders are very low. Then size of output filter is very small, and in this application leakage inductance of coupling transformer can acts as an output filter for MC voltage. Robust performance of proposed configuration in asymmetric fault conditions is another advantage of this topology. To verify this ability of proposed configuration; simulation result has been carried out in two asymmetric fault conditions. In first case a voltage sag was happened in phase A and RMS value of its voltage is decreased to Va = 40 kV as shown in Figure 11(a). Despite voltage sag in one phase of the grid voltages, proposed SSSC is still capable to control active and reactive power flow in transmission line as shown in Figure 11(b) and Figure 11(c). In second state, voltage sag is happened in phases A and B and RMS values of phase A and B are decreased to 40 kV and 45 kV respectively. The sending side voltages are
Matrix converter for static synchronous series compensator using cooperative bacteria foraging optimisation shown in Figure 12(a). Also, in this condition similar to normally condition and previous case, the proposed configuration has good operation and time response to control active and reactive power flow simultaneously. Figure 12(b) and Figure 12(c) illustrates the receiving end active and reactive power flow in this case. Figure 9
Figure 11
79
During voltage sag in phase A, (a) sending side voltages (b) receiving end active power (c) receiving end reactive power (see online version for colours)
Injected voltage of MC, (a) RMS value (b) FFT analysis
(a)
(a)
(b)
(b) Figure 10 (a) Three phase line current (b) FFT analysis for line current (see online version for colours) (c) Figure 12
During voltage sag in phase A and B, (a) sending side voltages (b) receiving end active power (c) receiving end reactive power (see online version for colours)
(a)
(a)
(b)
(b)
80
E.H.E. Bayoumi
Figure 12
During voltage sag in phase A and B, (a) sending side voltages (b) receiving end active power (c) receiving end reactive power (continued) (see online version for colours)
(c)
Results show satisfactorily performance of the proposed SSSC to control active and reactive power flow for different operating points in the transmission line without any output filter and DC-link.
6
Conclusions
In this paper, a novel configuration of SSSC based on MC is proposed. The proposed power circuit topology has not any DC-link and supplied from its power system. One of the main advantages of proposed topology is the possibility to generate an almost sinusoidal series compensation voltage using direct AC-AC MC. Using the optimal design of controller parameters by CBFO algorithm, the output voltage of MC can track their reference waveforms precisely. In comparison with conventional SSSC the proposed SSSC has the following advantages: •
simple control system and fast time response
•
elimination of DC-link in input and passive filter in output
•
bi-directional power flow
•
robust against symmetrical and asymmetrical voltage sags.
Results demonstrate the performance and ability of the proposed SSSC to control the active and reactive powers of transmission line in normal and fault conditions.
References Alavandar, S., Jain, T. and Nigam, M.J. (2010) ‘Hybrid bacterial foraging and particle swarm optimisation for fuzzy precompensated control of flexible manipulator’, International Journal of Automation and Control, Vol. 4, No. 2, pp.234–251. Alesina, A. and Venturini, M.G.B. (1981) ‘Solid-state power conversion: a Fourier analysis approach to generalized transformer synthesis’, IEEE Transaction on Circuits and Systems, Vol. 28, No. 4, pp.319–330. Alesina, A. and Venturini, M.G.B. (1989) ‘Analysis and design of optimum amplitude nine-switch direct AC-AC converters’, IEEE Transaction on Power Electronics, Vol. 4, No. 1, pp.101–112.
Babaei, E. (2012) ‘A new PWM based control method for forced commutated cycloconverters’, Energy Conversion and Management Journal, Vol. 53, No. 1, pp.305–313. Babaei, E. and Kangarlu, M.I. (2009) ‘A new topology for dynamic voltage restorers without DC link’, IEEE Symposium on Industrial Electronics and Applications, Iran, Tabriz, pp.1016–1021. Bayoumi, E.H.E. (2010) ‘Parameter estimation of cage induction motors using cooperative bacteria foraging optimization’, Electromotion Scientific Journal, Vol. 17, No. 4, pp.247–260. Bayoumi, E.H.E. (2012) ‘Design and control of an LCL series parallel resonant converters using bacterial foraging optimization’, International Journal of Power Electronics (IJPELEC), Vol. 4, No. 5, pp.497–504. Bayoumi, E.H.E. and Salem, F. (2012) ‘PID controller for series parallel resonant converters using bacterial foraging optimization’, Electromotion Scientific Journal, Vol. 19, Nos. 1–2, pp.64–78. Bayoumi, E.H.E., Maamoun, A., Pyrhönen, O., Khalil, M.O. and Mhfouz, A. (2002) ‘Enhanced method for controlling dependent integrated PWM converter-inverter system’, Proc. of the IASTED International Conf. of Power and Energy Systems, PES‘02, California, USA, May, pp.425–430. Bayoumi, E.H.E., Pyrhönen, O., Khalil, M.O., Mhfouz, A. and Maamoun, A. (2001) ‘Control method for minimising the DC link capacitance of integrated PWM converter/inverter systems’, Proc. of the 8th international Middle East Power Systems Conference, MPECON’01, Cairo, Egypt, pp.139–145. Cruz, J., Castilla, M., Miret, J., De Vicuna, J. and Guerrero, J. (2009) ‘Design of hysteretic regulators for low voltage and high-current applications’, Int. J. of Industrial Electronics and Drives, Vol. 1, No. 1, pp.25–33. Dujic, D., Jones, M. and Levi, E. (2009) ‘Generalised space vector PWM for sinusoidal output voltage generation with multiphase voltage source inverters’, Int. J. of Industrial Electronics and Drives, Vol. 1, No. 1, pp.1–13. Fort, A., Di Marco, M., Mugnaini, M., Santi, L., Vignoli, V. and Simoni, E. (2012) ‘Performance analysis of digital sliding mode controlled inverters’, SMARTGREENS 2012, Proc. of the 1st International Conference on Smart Grids IT Systems, pp.221–225. Hojabri, H., Mokhtari, H. and Chang, L. (2011) ‘A generalized technique of modeling, analysis, and control of a matrix converter using SVD’, IEEE Transactions on Industrial Electronics, Vol. 58, No. 3, pp.949–959. Klumpner, C., Blaabjerg, F., Boldea, I. and Nielsen, P. (2006) ‘New modulation method for matrix converters’, IEEE Transaction on Industrial Application, Vol. 42, No. 3, pp.1234–1246. Lee, S-H. and Chu, C-C. (2004) ‘Power flow computations of convertible static compensators for large-scale power systems’, IEEE Power Engineering Society General Meeting, Vol. 1, pp.1172–1177. Mancilla-David, F., Bhattacharya, S. and Venkataramanan, G. (2008) ‘A comparative evaluation of series power-flow controllers using DC- and AC-link converters’, IEEE Trans. on Power Delivery, Vol. 23, No. 2, pp.985–996. Nguyen, H.M., Lee, H-H. and Chun, T-W. (2011) ‘Input power factor compensation algorithms using a new direct-SVM method for matrix converter’, IEEE Transactions on Industrial Electronics, Vol. 58, No. 1, pp.232–243.
Matrix converter for static synchronous series compensator using cooperative bacteria foraging optimisation Park, J.W., Harley, R.G. and Venayagamoorthy, G.K. (2003) ‘New internal optimal neurocontrol for a series FACTS device in a power transmission line’, Neural Networks Journal, Vol. 16, Nos. 5–6, pp.881–890, Elsevier Science Ltd. Shao, Y. and Chen, H. (2009) ‘The optimization of cooperative bacterial foraging’, Proceedings of the 2009 WRI World Congress on Software Engineering, Vol. 2, pp.519–523.
81
Tadano, Y., Urushibata, S., Nomuro, M., Sato, Y. and Ishida, M. (2007) ‘Direct space vector PWM strategies for three-phase to three-phase matrix converter’, Proc. IEEE Power Converters. Conf., April, pp.1064–1071.