L. Fortuna, A. Gallo, G. Nunnari. Istituto di Elettrotecnica ed Elettronica. Facolt5 di Ingegneria, Universiti di Catania viale Andrea Doria 6, 95125 Catania, Italy.
Proceedings of the 28th Conference on Decision and Control Tampa, Florida December 1989
TA13
- 10~15
NEW RESULTS INVOLVING OPEN-LOOP BALANCED REALIZATION SCHEMES
L. Fortuna, A. Gallo, G. Nunnari Istituto di Elettrotecnica ed Elettronica Facolt5 di Ingegneria, Universiti di Catania viale Andrea Doria 6, 95125 Catania, Italy 2. OPEN-LOOP BALANCING
ABSTRACT We present two new results involving open-loop balanced realization schemes, referring to the solution of different problems. The first one concerns the open balanced representation of linear systems S(A,B,C) where in the matrices A , B, C a parameter in contained. The second one concerns the possibility of using an "approximate balanced approximation scheme" for characterizing a general class of unstable symmetrical systems. 1. INTRODUCTION
Open-loop realization assumed in the last years a fundamental role in solving approximation of control problems; it can be generally considered a powerful tool for studying, in a new way, networks and dynamic systems. In this paperwe concentratemattention on studying further aspects of the well-known open-loop balanced realization techniques [ l ] used successfully for the analysis and the design of large scale control systems. Open-loop balanced representation has been introduced in the control area by Moore and widely studied in [ 2 1 Moreover some questions are today open problemsand deserve tobe suitably investigated.
.
In the proposed study we present some ideas regarding two aspects that are not widely investigated in the actual literature. The first one regards the open-loop representation of linear systems S(A,B,C) where in the matrices A , B, C an unknown but bounded parameter is contained. The proposed approach appears suitable also for closed-loop balanced representation. The second one concerns the possibility of obtaining open-loop balanced representations also for unstable systems, and for the class of systems with poles close to the imaginary axis. In literature it has been proved that only symmetric systems with particular properties of the Hankel matrix [ 31 can be open-loop internally balanced. Recently a general approach has been presented in [4] allowing the open-loop balancing of linear time invariant systems. We introduce in the second part of the paper a new technique to obtain an internally open-loop balanced realization for symmetric systemsoriginally not having definite (or semidefinite) positive (or negative) Hankel matrix.
Assuming that in a generical system representation (in frequency dominion or in state space form) a quantity is a parameter, some properties can be assumed regarding the continuity of the second modes and of the same quantities in the open-loop balanced realization scheme [ 5 ] In this way taking into account the parameterization scheme [ 6 ] , the problem can be solved as follows: a) find the balanced representation for a defined set of the considered parameters; b) evaluate the necessary quantities in the parameterization; c) interpolate the parameterization by using polynomial interpolation theory; d) obtain balanced realization from the parameterization approach.
.
Consideration: the signature matrix in the step a) cannot change, in the range of the parameter variation, in order to apply the complete procedure. Example The following transfer function of the parametric system SI is taken into account: W(s) =
s2
3
+
s +AS
2s
2
+
+5
with
1.5< . A < 10
.
s+l
A discrete n number of open-loop balanced realizations S ( z , g , E ) is obtained.
By using polynomial interpolation the second order (i=1,2,3) of the system and the n terms Gi modes of the B matrix are respectively reported:
'li
5 4 3 2 +.0362X -.4661X +2.9092X -8.3915X+ 16.2496
U
=-.011A
U
7 6 5 4 3 2 =-.0001A +.0037A-.0704X +.7241). -4.3685X ~15.50421-
1 2
-29.7400 A +28.5212 5 3 2 =-.OOOlX +.0037h4-.0482X +.3043X -.9491X +1.2617 3
LT
5 3 2 =.00004X -.O013X4+.O162x -.0878x +.1545;( +1.2528 1
E 2=-.0003X
7 6 5 +.0155~-.3003h +3.1093~~-18.4482X~
-61.9151 X2-106 .5245 X
-
+ 70.4829
3 3=-.0023X5+ .o823k4-.9 1 5 5 ~+4.5796h2-9. 5407x +5.a020
CH2642-7/89/0000-1331$1.00@ 1989 IEEE -----
-_
1331
.
The signature matrix of the system is S=diag(l,-l,l), then a parametric balanced representation of S1 can be easily obtained by using classical formulas [ 6 , 7 1
.
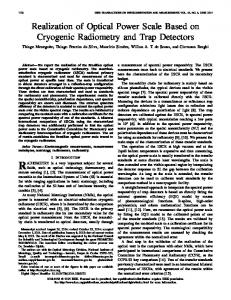
In Fig. 1 the trend (a) of the computed U is shown for a set of different 1 value in comparisonlwith the interpolated curve (b); in Fig. 2 the difference error between the (a) and (b) curves is drawn.
10
9. 5
3
Then the problem can be approached as a constrained optimization problem. In fact the idea consists in finding a new unstable system that differs as littleas possible from the original with the constraint on the Hankel matrix eigenvalues. The question is to investigate measuring the distance "d" between the two systems. If G1 is the original plant and G 2 the second one, some parameters of G2 can be obtained as follows: since d = (G -G2), it will be minimized with con1 straints to be the Hankel matrix of G2 as we want. In this way an approximate balanced realization can be obtained. In the hypothesis of considering systems belonging classes (systems characterized by matrixto the RL, values proper, with no poles on the imaginary axis), one way is to consider as distance between the two systems (the original one and the auxiliary one) the (IRL(1, norm of the difference error given as:
8. 5
E(s) = [ G ( s ) - G2(s)]. 1 Then if we consider fixed the unstable poles of each transfer function [g..(s)] of G ( s ) and G ( s ) , 1 2 the problem is to obtainlJa set S of coefficients of each transfer function in order to have
Fig. 1 Trend of al (a) and interpolated curve (b).
min J
=
ess sup IIE(jw)ll w
S
(with 1)
constrained to make all p H (the Hankel matrix eigenvalues of the system G ) nht negative or not positive. 2 Another approach, in order to define the distance between the two systems G and G , is to refer the 1 approach to a topology introduced ?or unstable systems in [ 8 ] , where the "graph metric" is defined.
A.
-0. 1
0
2
4
6
8
\Is we indicate the spectral norm of E(jw))
10
In o u r case, if we suppose GI and G2 to have the same dimensions and let (N., D.) be a normalizedcoprime 1 1 factorization of G (i=l,2), an upper bound of the graph metric d(G:, G ) is introduced to measure the 2 distance between the two unstable systems as:
Fig. 2 Difference error between the (a) and (b) curves.
3. OPEN-LOOP BALANCING OF UNSTABLE SYSTEMS
d(G1, G2 ) < It is well known under which conditions a balanced realization can be obtained also for unstable symmetric systems: the Hankel matrix must be (semi)positive or (semi)negative definite [ 3 ] A new way for open-loop balancing of systems with unstable modes has been studied by using auxiliary asymptotically stable systems [4 ] The problem is now formalized in the following approach.
JM =
20 1 - 0
.
.
Let u s suppose an unstable system with Hankel matrix without the previous properties. The proposed procedure consists in two steps: 1) to obtain an unstable model of the same order as the original one which has the same unstable poles (eigenvalues) but constrained, for example, to have its zeros and the other stable poles in order to make the system with Hankel matrix positive or negative definite; 2) to get a balanced open-loop realization of the obtained high order system derived in the step 1. 1332
The objective optimization function in this case is J M and the optimization variables are in M1, while the constraints are the previously introduced ones. The algorithm is developed as follows: 1) make a coprime factorization of the original system
G1(s); 2) make a coprime factorization of a G ( s ) with para2 meters initialized in a such a manner that the Hankel matrix be (semi)definite positive or (semi) definite negative;
3) compute e ; 4) utilize a constrained optimization algorithm in onder to minimize J . M' 5) carry out the open-loop balanced realization.
REFERENCES
In order to outline an approach also in the time domain, we must limit our attention to measuring a distance between the original system and the auxiliary one in a finite time horizon, in fact measuring in this case can be computdin the L sense, ie.: e(T)
[y(t)-yJt)l
2 dt
.
Moreover the functional e(T) must be minimized in accordance with the criterion of retaining the unstable eigenvalues and considering as optimization variables other quantities that are involved in the system dynamics. Consideration: the problem of considering the optimization restricted to a finite time horizon is not unrealistic, due to the fact that in real systems the interval time T is such as to lead the system in saturation. Therefore approaching the problem in the range time T is realistic because it allows us to focalize the unstable system dynamical behaviour in the time range where it is effectively linear. CONCLUSIONS -
K.V. Fernando and H. Nicholson, "On the structure of balanced and other principal representations of SISO systems", IEEE Trans. Autom. Contr., vol. 28, n. 2, pp. 228-231, 1983. C. Kenney and G. Hewer, "Necessary and sufficient conditions for balancing unstable systems", Trans. Autom. Contr., vol. 32, pp. 157-160, 1987. D.G. Meyer, "A fractional approach to model reduction", Proceedings of the American Control Conference, 1988, pp. 1041-1047.
L. Fortuna, A. Gallo, G. Nunnari, "On constrainty properties of some parameters in balanced realization", Tech. Rep. IEE, TR-1/88, University of Catania, 1988. P.T. Kabamba, "Balanced forms: canonicity and parameterization", IEEE Trans. Autom. Contr., vol. 30, pp. 1106-1109, 1985.
L. Fortuna, A. Gallo, G. Nunnari, "A new parameterization of MIMO systems", Int. Journal of Systems Science, vol. 20, n. 9, 1989.
In this paper we have outlined some ideas on studying two unsolved problems in the open-loop balanced realization. With reference to the first one two further investigations are in progress: the multiparameter case and the problem of the optimal interpolation technique. Referring to the second outlined one some open questions arise both as regards the suitable definition of distance between two unstable systems in order to well-pose the optimization procedure and the study of the existence and of the solution multiplicity. For both the treated problems numerical theoretical aspects are still research subjects.
B.C. Moore, "Principal component analysis in linear systems: controllability, observability and model reduction", IEEE Trans. Autom. Contr., vol. 26, n. 1, pp. 17-32, 1981.
and
1333
M. Vdysagar, "The graph metric for unstable plants and robustness estimates for feedback stability", IEEE Trans. Autom. Contr., v o l . 25, n. 5, pp. 403417, 1984.