Wenping Cao. School of Science and Technology. University of Teesside. Tees Valley, TS1 3BA, England. Ian French. School of Science and Technology.
Non-Intrusive Efficiency Determination of In-Service Induction Motors using Genetic Algorithm and Air-Gap Torque Methods Bin Lu
Wenping Cao
Innovation Center Eaton Corporation Milwaukee, WI 53216, U.S.A.
School of Science and Technology University of Teesside Tees Valley, TS1 3BA, England
Ian French
Keith J. Bradley
Thomas G. Habetler
School of Science and Technology University of Teesside Tees Valley, TS1 3BA, England
School of Electrical and Electronic Eng. University of Nottingham Nottingham, NG7 2RD, England
School of Electrical and Computer Eng. Georgia Institute of Technology Atlanta, GA 30332, U.S.A.
Abstract — In-service testing poses particular difficulties for experimentally determining induction machine efficiency. This paper focuses on non-intrusive methods for testing in-service machines and proposes a hybrid method based on the air-gap torque method and genetic algorithms. The proposed method has been verified from the experimental results from three induction motors rated at 7.5 hp, 100 hp and 225 kW. The overall efficiency estimation accuracy is approximately within 45% errors. Keywords — efficiency estimation; equivalent circuit; induction motors; in-service testing; genetic algorithms; air-gap torque method; parameter estimation
I.
INTRODUCTION
The increase in energy awareness is accelerating the requirement for improvements in electrical machine efficiency. Among the common machine types, induction motors are the most important consumers of electrical energy. Thus, if accurate and non-intrusive methods of estimating the efficiencies of these machines can be established, the door to a relatively straightforward means of cost-effective energy savings will be opened. In the literature, numerous methods have been proposed to evaluate the efficiencies of induction motors [1]. However, the need to determine efficiency under normal operating conditions poses particular difficulties when experimentally determining efficiency by conventional methods. For example, in-service machines cannot be readily decoupled to perform a no-load test, as is defined in the standards [2, 3]. As a result, the existing efficiency evaluation methods vary significantly in complexity, intrusion level, and accuracy, when used in “normal” plant conditions [1, 4]. In general, the more intrusive
the testing is, the more accurately the machine’s electrical parameters can be measured. However, to reduce disruption to normal machine operation to an acceptable level, several empirical factors have been introduced. For instance, stray-load loss (SSL) is predicted using a fixed ratio of the rated output power depending on the machine’s ratings [2]. Also, the rotor leakage reactance can be calculated by a fixed ratio of stator leakage reactance depending on the NEMA code and the type of rotor, according to the NEMA MG-1 and IEEE 112 standards [2, 5]. This paper presents some preliminary findings in the development of one such non-intrusive method for testing inservice induction machines. The method is based on a nonintrusive air-gap torque method and uses genetic algorithm to estimate machine parameters. Experimental results are provided from three induction motors rated at 7.5 hp, 100 hp and 225 kW, labeled as machines A, B and C, respectively. The key nameplate information of these motors is listed in the Appendix.
II.
EXISTING METHODS FOR IN-SERVICE INDUCTION MOTORS In [4], 30 different existing methods for determining motor efficiency are compared. A more comprehensive and recent literature survey on motor efficiency estimation is presented in [1], with special focus on in-service induction motors, considering the recent advances in online rotor speed and stator resistance estimations. Some existing methods can be considered to be low intrusion methods. However, few are non-intrusive. Generally, these methods can be categorized into three groups.
0197-2618/07/$25.00 © 2007 IEEE
1186
A. Torque methods These methods directly measure the input line voltages and currents, input power, and stator winding resistance. The shaft torque is either directly measured using a torque transducer or estimated from the average air-gap torque, which is calculated using the measured variables. Stray-load loss, and windage and friction losses (WFL) are subtracted from the air-gap power to find the output power. The major drawback is that the speed and stator resistance have to be accurately measured by using additional sensors and additional tests such as no-load and un-power tests are required, which prevent its wide application in in-service motors. B. Current methods These methods largely rely on the machine nameplate or manufacturer’s data to obtain information on machine currents and speed. They often assume that load current varies linearly with percentage load [1, 4]. This, however, produces large errors due to the actual nonlinear relationship, which excludes a large range of load conditions. C. Empirical methods These methods are derived from testing a large number of machines. Typical examples are the Oak Ridge Motor Efficiency and Load (ORMEL) 96 method [6], and the Stanford Empirical Method [1, 4]. These methods vary significantly in determining machine parameters and losses. Nevertheless, the testers’ experience can play a significant role and the resultant errors can be as much as 10% or even more in efficiency estimation [7].
III.
GENETIC ALGORITHMS
The genetic algorithm (GA) is a stochastic global optimization method that is inspired by the principles of evolution found in nature [8]. It is gaining in popularity in optimizing system design, parameter identification, and in solving nonlinear equations. The GA works with a population of individuals represented by bit strings and modifies the population with random search and selection operations. Compared with other numeric methods such as NewtonRaphson, the GA is capable of finding the global minimum, and requires neither initial estimates nor the use of any derivative of a function [9]. The significance of this approach lies in number manipulation and natural selection. The key operators in the computation consist of reproduction, crossover, and mutation. Generally, the GA is implemented by firstly assigning each unknown parameter a random binary code (string). A population of strings can be generated through repeating this procedure. Reproduction involves a process that each string is assessed against predetermined criteria of fitness (fitness function). The fitters are more likely to survive and to produce offspring in the next generation. Crossover represents mating and swapping of some information of the two strings that are also randomly selected from the survivors of the selection process. Mutation occurs to one randomly selected string to
invert its binary code from 0 to 1, or vice versa. By manipulating the degree of each process involving the three operators, some global optimal solutions from the population can be achieved. In this paper, the Matlab environment is used to implement a bespoke GA that searches for the machine’s equivalent circuit parameters, based on measurements made via the machine terminals. In the results presented in section IV, the GA predictions are made off-line in an attempt to reduce any errors that may arise from experimental measurements.
IV.
THE PROPOSED METHOD AND TESTING PROCEDURES
Based on the GA as an optimized search tool, this paper proposes a hybrid efficiency estimation method incorporating features that can be found in the air-gap torque methods, loss segregation methods and equivalent circuit methods. Air-gap torque methods have proven themselves to be highly precise methods under field conditions with reported accuracy of 0.5-1% errors [10, 11]. An improved non-intrusive version of these methods has been recently developed in [12]. The test results have shown that it is capable of estimating efficiency at an accuracy of 2-3% errors. To obtain the equivalent circuit parameters and in turn allow the prediction of machine efficiency at any load condition, input voltages, input currents, input power, stator resistance, and rotor speed need to be determined. Since non-intrusiveness is desired, the only information available is the motor terminal quantities. Measurements of input line voltages, line currents, and input power can be easily obtained. However, stator resistance and rotor speed are rather difficult, as the resistance is traditionally measured after shutting down the machine and rotor speed is obtained by using additional sensors. Consequently, methods for the online measurements of stator resistance and rotor speed are needed. This paper adopts the online methods recommended in [1]. The specific methods are briefly described in the following sections. A. Online stator resistance measurement The dc signal injection method proposed in [13] has been employed in this study. As shown in Fig. 1, a simple MOSFET-controlled circuit is connected in one of the three phases between the power source and the machine under test. A controllable dc bias is intermittently injected into the machine, causing dc components in the motor input voltages and currents. Since the injected dc current signal can produce a small level of unbalances in the stator voltages and currents, leading to torque distortion and additional power dissipation, the dc bias is controlled to be as low as possible to minimize any adverse effects. Overall, this method is capable of estimating stator resistance to an accuracy of less than 0.5% errors, despite any load variation, as reported in [13]. Moreover, for inverter-fed and softstarter-connected machines, this additional dc signal injection circuit is not even required, since signal injection can be readily implemented by adjusting the existing switching strategy of the semiconductor devices.
1187
B. Online rotor speed estimation Commonly, direct measurement of the rotor speed requires a shaft-mounted speed encoder or an optical tachometer to be installed. However, in many circumstances, installing additional sensors is not possible under field conditions. In this study, an online sensorless rotor speed estimation method, developed in [14], is used for determining the rotor speed. This method is based on the motor magnetic saliency harmonics, which arise from rotor slotting and eccentricity. The major procedure of this method is given in Fig. 2.
Stray-load loss under rated load is assumed in accordance with the IEEE standard [2] (i.e., k = 1.8% of the rated output power for machines A and B, and 1.5% for machine C), depending on their power ratings. For any loads other than the rated, SSL is calculated by Pssl =
(1)
where fseh is the frequency of rotor slot harmonic components; f1 is the supply frequency; k = 0, 1, 2, …; R is the number of rotor slots; p is the number of poles; s is the motor slip; nd = 0, ±1, ±2, …, is the order of rotor eccentricity; and nw = ±1, ±3, …, is the air-gap MMF harmonics order. The speed estimation process consists of two algorithms: an initialization algorithm and an online speed detection algorithm. The initialization algorithm employs the eccentricity harmonics to determine the value of R and an optimal set of numbers for k, nd, and nw , which are usually unknown quantities. After that, the subsequent online speed detection algorithm estimates the rotor speed by
s = 1−
f seh f1
− nw p ⋅ 2 kR + nd
(2)
The slip estimate is independent of motor parameters, only requiring the number of poles. The determination of slot harmonic frequency requires the motor to be in steady state so that f1 and s are nearly constant; thus, this method is ideal for online efficiency estimation, where only steady states are concerned. This method provides robust speed estimate down to 1 Hz operation with a high accuracy of within 5 rpm (for a 4pole machine) at high speeds and 0.005 p.u. slip at low speeds. C. Implementation of genetic algorithms The method of determining machine efficiency or loss components for an induction motor relies largely on the machine model used in the analysis. Figure 3 shows a modified equivalent circuit employed in this study. Of the parameters shown in the model, the stator resistance Rs can be measured online with a satisfactory accuracy, and the rotor leakage reactance Xr can be derived from stator leakage reactance Xs . This empirical factor is given in NEMA MG1 [5] and IEEE 112-F1 [2]. Namely, Xr = Xs / 0.67 for the NEMA design B motors used in this case. As a consequence, there are only four parameters that remain unknown and need to be estimated: (i) stator leakage reactance Xs, (ii) magnetizing resistance Rm , (iii) magnetizing reactance Xm, and (iv) rotor resistance Rr . In Fig. 3, the output power is calculated by subtracting windage and friction losses from the estimated output power.
(3)
As a result, the SSL resistance is given by
The frequencies of these rotor and dynamic eccentricity harmonics are related to the rotor speed by
1− s + nw f seh = f1 (kR + nd ) p/2
Prated − ssl ×I2. 2 I rated
Rssl = kRr
1 − srated , srated
(4)
where srated is the slip under rated load. The stator current and input power can be calculated using the equations 1 1 1 1 ×( + + ) R + jX s Rr / s + Rssl + jX r Rm jX m , I s = Vs × s 1 1 1 1 + + + Rs + jX s Rr / s + Rssl + jX r Rm jX m
(5)
and Pin = 3I s2 Rs + 3I m2 Rm + 3I r2 [ Rr +
Rr (1 − S ) kRr (1 − Srated ) , + ] + k wf n S S rated
(6)
where k wf n denotes the windage and friction losses. The magnetizing and rotor currents are calculated as 1 V R s + jX s Im = s × 1 1 1 1 Rm + + + R s + jX s Rr / s + Rssl + jX r R m jX m
,
1 1 × . Rs + jX s Rr / s + Rssl + jX r I r = Vs × 1 1 1 1 + + + Rs + jX s Rr / s + Rssl + jX r R m jX m
(7)
(8)
The GA used to solve the four unknown variables is implemented within the Matlab environment. Each unknown parameters is represented by a 25-bit binary string (with 15 bits after the decimal point). Together, they are then combined to form a 100-bit individual. The GA mechanisms are fairly standard. The population size is selected to be 500 and a maximum of 10,000 generations are permitted. Uniform selection with an elite count of 2 and stochastic multipoint crossover form the basis of the algorithm. Mutation is also uniform, with relatively high rate to keep algorithm “awake”. Fitness scaling is proportional. After the initial runs, parameter normalization is applied and simple penalty functions are used to maintain sensible operation. Moreover, it is observed that, in addition to the four unknown parameters, the WFL coefficient kwf could also be predicted as a by-product of the GA calculations if included in equation (6).
1188
_V
sw,dc +
a'
a
Ias,dc
Rsource n
Rs s
Rsource
Rsource c'
Rs
Rs b'
c
b
Figure 1. Online stator resistance measurement circuit
Figure 2. Online rotor speed detection algorithm
Rs
Xs
Xr
Rr
Im
(1 − s )Rr
Vs Is
Rm
Xm
Ir
s RSSL
Figure 3. Modified equivalent circuit of induction motors
1189
140 130 120 110 Real component
V. RESULTS AND DISCUSSIONS A series of tests have been conducted to assess the capabilities of the GA approach in determining the required machine parameters. In the beginning of these tests, several fitness functions are constructed based of the sum of the squares (or in some cases sum of the absolute) differences between the input power measurement and input power calculated by equation (6).
100 90 80 70
The application of this fitness function to the test data for machine B proves somewhat disappointing. In total, several tens of runs are performed using slightly different variations of the GA. Table I presents a typical series of the results. Clearly, whilst the estimates for Rr and Xs are reasonably consistent; the estimates for Xm and, in particular, Rm are not. What is more, a similar pattern emerges when the data from machine A and C are used.
60 50 50
60
70
80
90 % Load
100
110
120
130
Figure 4. Real component of stator current for machine B -20 -30
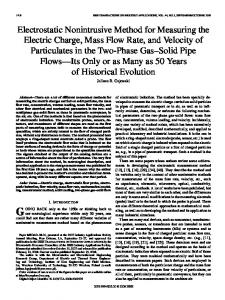
To overcome this problem, a modified fitness function is proposed, in which the measured line voltage and input power are used to resolve the stator current into its real and imaginary components. Whilst Fig. 4 and 5 show a comparison of the measured and calculated resolved currents for machine B based on the estimates made in Run 3 (‘o’ measured; ‘-’ calculated). Fitness is then calculated based on a weighted sum of the normalized absolute differences between the resolved components of the measured current and those calculated using equation (5). Table II presents the results of a typical series of results for machine B. Table II shows a considerable consistency in the estimates for Rr, Xs (with the values for Rr and Xs also agreeing strongly with those shown in Table I) and Xm, with Rm once again proving poorly consistent. The problem seems to be associated with the proportion of parameters. If the relative values of Rr/s and Rm are in proportion to the currents flowing in the rotor and iron loss branches then less than 0.5% of the current flows through Rm . Therefore, to reasonably estimate Rm , far greater measurement accuracy is necessary. To overcome this problem, an alternative method based on Gauss-Seidel and empirical factors is employed. These results are given in Table III. Based on the above results, efficiency can be predicted over a wide range of load conditions, this is shown graphically in Fig. 6 to 8, where the GA estimated efficiencies under various load conditions are compared with those obtained by the airgap torque method. From these figures, it can be seen that the overall error in efficiency determination is approximately 4-5%. This level of estimation may be effective when the actual machine efficiency is not very high. However, for highly efficient machine, the GA prediction is rather limited over a wide range of loads.
-40 Imaginary component
The reason for this is that the fitness function, based on equation (6), uses only magnitude information of Is, Im and Ir. Consequently, for the magnetizing branch (where no apriori information is available and where both parameters need to be estimated), the solution is clearly not unique.
-50 -60 -70 -80 -90 -100 -110 50
60
70
80
90 % Load
100
110
120
130
Figure 5. Imaginary component of stator current for machine B
TABLE I.
Run 1 Run 2 Run 3 Run 4 Run 5 TABLE II.
Run 1 Run 2 Run 3 Run 4 Run 5
GA RESULTS FOR MACHINE B USING A FITNESS FUNCTION BASED ON EQUATION (6) Rr 0.0414 0.041 0.0415 0.0408 0.0413
Rm 35.946 330.737 107.146 188.831 959.682
Xm 47.6 26.175 56.789 23.922 38.777
Xs 0.372 0.37 0.373 0.369 0.372
GA RESULTS FOR MACHINE B USING A FITNESS FUNCTION BASED ON EQUATION (5) Rr 0.0399 0.0399 0.0399 0.0399 0.0399
Rm 151.06 503.85 410.49 162.5 542.42
Xm 12.975 13.075 12.986 12.941 12.936
Xs 0.363 0.363 0.363 0.361 0.361
TABLE III. MEASURED AND PREDICTED ELECTRICAL PARAMETERS FOR THE THREE MACHINES
Parameter Rr Xm Xs Rs Rm Xr
A 0.167 15.33 0.79 0.103 4841 1.18
B 0.039 12.93 0.36 0.047 440 0.54
C 0.431 139.79 4.39 0.345 5538 6.55
Method used GA GA GA Measurement Gauss-Seidel Empirical
1190
100
95
efficiency (%)
90
85 air-gap t orque 80
GA met hod
75
70 0
20
40
60 load (%)
80
100
120
Figure 6. Comparison of efficiency for machine A
100 98 96
efficiency (%)
94 92 90 air-gap t orque
88
GA met hod
86 84 82 80 0
20
40
60
load (%)
80
100
120
140
120
140
Figure 7. Comparison of efficiency for machine B
100 98 96
efficiency (%)
94 92 90 air-gap t orque
88
GA met hod
86 84 82 80 0
20
40
60
load (%)
80
100
Figure 8. Comparison of efficiency for machine C
1191
VI. CONCLUSIONS AND FUTURE WORK This paper has outlined a preliminary investigation on a hybrid non-intrusive method for in-service induction motor efficiency estimation based on genetic algorithms. The nonintrusive characteristic of the proposed method requires that it can only use information that can be obtained from the machine terminals and the nameplate to calculate the parameters of the equivalent circuit. The proposed method has been verified by experimental results from three induction motors with various physical configurations, rated at 7.5 hp, 100 hp, and 225 kW. The overall efficiency estimation accuracy is approximately within 4-5% errors. However, whilst results so far are promising, the estimation of the magnetizing resistance, Rm, has proved to be a challenge. The difficulty lies in the relatively small impact of the magnetizing current (in the order of 0.5% in this case) on the terminal measurements. Moreover, whilst it is possible that modifications to the relatively simple GA used in this study may overcome this problem, it is believed that problem lies in the measurements themselves. Therefore, an alternative method of estimating Rm is in need. One possibility is to take a lead from measurement systems theory and to use some form of differential measurement to identify such a small quantity hidden by a large offset.
REFERENCES [1]
[2] [3]
[4]
[5] [6]
[7]
[8]
[9]
ACKNOWLEDGMENT This research was supported, in part, by a U.S. Department of Energy award (DE-FC36-04GO14000). The authors thank Mr. Pinjia Zhang for his assistance in experimental setup and data collection.
[10]
[11]
[12]
APPENDIX THE LIST OF INDUCTION MOTORS UNDER TEST
[13]
Machine
Manufacturer
Power
Hz
V
A
RPM
A
Emerson
7.5 hp
60
460
10
1765
B
US Electric
100 hp
60
460
114
1760
C
GEC Alsthom
225 kW
50
3300
47
1483
[14]
B. Lu, T. G. Habetler, and R. G. Harley, “A survey of efficiency-estimation methods of in-service induction motors,” IEEE Transactions on Industry Applications, vol. 42, no. 4, pp. 924-933, July/Aug. 2006. IEEE Standard Test Procedure for Polyphase Induction Motors and Generators, IEEE Standard 112-2004, Nov. 2004. Method for determining losses and efficiency of three-phase cage induction motors, IEC Standard 61972 (2G/125/FDIS), Sept. 2002. J. S. Hsu, J. D. Kueck, M. Olszewski, D. A. Casada, P. J. Otaduy, and L. M. Tolbert, “Comparison of induction motor field efficiency evaluation methods,” IEEE Transactions on Industry Applications, vol 34, no. 1, pp. 117-125. Jan./Feb. 1998. NEMA – MG 1 Standard, 2003. P. Otaduy, “ORMEL 96 (Oak Ridge Motor Efficiency and Load), A computer program for in-service estimation of motor efficiency and load with minimum intrusion: user’s guide,” ORNL/MC-ORMEL1, March 15, 1996. P. Pillay, V. Levin, P. Otaduy, and J. Kueck, “In-situ induction motor efficiency determination using the genetic algorithm,” IEEE Transactions on Energy Conversion, vol. 13, no. 4, pp. 326-333, Dec. 1998. N. Okaeme, P. Zanchetta, and M. Sumner, “Automated online design of robust speed digital controllers for variable speed drives,” in Proc. 41st IEEE Industry Applications Society Annual Meeting, vol. 2, Oct. 2006, pp. 658-663. P. Pillay, R. Nolan, R, and T. Haque, “Application of genetic algorithms to motor parameter determination for transient torque calculations”, IEEE Transactions on Industry Applications, vol. 33, no. 5, pp. 1273-1282, Sept./Oct. 1997. J. S. Hsu and P. L. Sorenson, “Field assessment of induction motor efficiency through air-gap torque,” IEEE Transactions on Energy Conversion, vol. 11, no. 3, pp. 489-494, Sept. 1996. J. S. Hsu and B. P. Scoggins, “Field test of motor efficiency and load changes through air-gap torque,” IEEE Transactions on Energy Conversion, vol. 10, no. 3, pp. 477-483, Sept. 1995. B. Lu, T. G. Habetler, and R. G. Harley, “A nonintrusive and inservice motor efficiency estimation method using air-gap torque with considerations of condition monitoring,” in Proc. 41st IEEE Industry Applications Society Annual Meeting, vol. 3, Oct. 2006, pp. 1533-1540. S. B. Lee and T. G. Habetler, “An online stator winding resistance estimation technique for temperature monitoring of line-connected induction machines,” IEEE Trans. on Industrial Applications, vol.39, no. 3, pp. 685-694, May/June 2003. K. D. Hurst and T. G. Habetler, “Sensorless speed measurement using current harmonic spectral estimation in induction machine drives,” IEEE Transactions on Power Electronics, vol. 11, no. 1, pp. 66-73, Jan. 1996.
1192