On a Local Heuristic for a Reverse Multicast Forwarding Game Sarvesh Varatharajan Electrical Engineering and Computer Science University of Kansas Lawrence,KS,USA Email:
[email protected]
Abstract—We consider the problem of incentive compatible topology control for selfish all-to-one (reverse multicast) routing as modeled by a locally minimum cost forwarding game in [4], with new focus in this work on efficient local implementability in the absence of complete global information for realistic scenarios. In this work we consider a new locally computable heuristic “recommendation algorithm”, which we refer to as LocalHeur for convenience. LocalHeur lies within the class of location based routing methods with particular similarity to the Nearest Forward Progress algorithm [7] though from the perspective of game-theoretic reverse multicast routing. We find that LocalHeur actually outperforms DeltaHeur of [4] in terms of global optimality in random Euclidean power instances which model wireless networks, though at the expense of loosening the Nash equilibrium condition. Nonetheless, we find that the relaxation of the Nash condition is strongly bounded in multiple ways, with high probability: The vast majority of players are provably playing a best response, while simulation results demonstrate that the average deviation ratio from a best response is within a decimal point of 1. Furthermore, the player deviating most from his best response is provably still within O(log n) of the cost of his best response, while simulation results support a much smaller maximum deviation from the best response. Keywords-sensor networks; incentive compatible topology control; game theory; heuristics for NP-Hard problems; location based routing; local algorithm; random Euclidean power graphs
I. I NTRODUCTION Topology control protocols, determining which links are to be used for forwarding data packets from sources to destinations, play a central role in wireless networking [11], [15]. With increasing awareness of the effects of selfish node behavior in networks, incentive-compatible topology control has recently received attention from the research community [5], [3], [10], [12], [8], [3], [1], [2]. We consider the problem of incentive compatible topology control for selfish all-to-one (reverse multicast) routing as modeled by a locally minimum cost forwarding (LMCF) game in [4], with new focus in this work on efficient local implementability in the absence of complete global information for realistic scenarios. The LMCF game can be briefly expressed as follows: Whereas each node requires a path to the destination, it does not care how long that path is, so long as its own individual
Gunes Ercal-Ozkaya Electrical Engineering and Computer Science University of Kansas Lawrence, KS, USA Email:
[email protected]
or local forwarding cost is minimized. From a systemwide perspective, short paths are clearly desirable, yielding the social objective of finding topologies that minimize the maximum stretch factor. In [4], while the problem of finding an optimal Nash equilibrium for the LMCF game was shown to be NP-Hard even when restricted to three dimensional Euclidean instances and inapproximable in general, along with further negative worst-case results demonstrating instances of Euclidean graphs with Θ(n) price of stability (i.e. ratio of the social cost of the best Nash equilibrium to the globally optimal social cost), a heuristic DeltaHeur was proposed that guaranteed Nash equilibria while also approximating the global optimum to within small constant factors in expectation in random Euclidean power graphs modeling wireless networks. In particular, it was shown that DeltaHeur performed ω(1) better than the Minimum Spanning Tree (MST), which also guarantees Nash equilibria though with poor global performance. However, as DeltaHeur requires complete information of node locations which may be unrealistic in some wireless scenarios, in particular in the presence of mobility, in this work we consider a new locally computable heuristic “recommendation algorithm”, which we refer to as LocalHeur for convenience. LocalHeur lies within the class of location based routing methods [9], [13], [14], [7] with particular similarity to the Nearest Forward Progress (NFP) algorithm [7] though from the perspective of game-theoretic reverse multicast routing. We find that LocalHeur actually outperforms DeltaHeur in terms of global optimality in random Euclidean power instances which model wireless networks, though at the expense of loosening the Nash equilibrium condition. Nonetheless, we find that the relaxation of the Nash condition is strongly bounded in multiple ways, with high probability: The vast majority of players are provably playing a best response, while simulation results demonstrate that the average deviation ratio from a best response is within a decimal point of 1. Furthermore, the player deviating most from his best response is provably still within O(log n) of the cost of his best response, while simulation results support a much smaller maximum deviation from the best response. Finally, under the assumption of local information, it may be more costly for a player to check whether forwarding to
a closer player who is behind him would create a cycle than it would be to simply forward to the closest player ahead of him, thus making LocalHeur configurations candidates for equilibria under incomplete information, such as BayesNash equilibria.
on the maximum distance of any node to the destination in GS [4]: SCstretch (S) = maxv∈V \{t}
dS (v, t) d(v, t)
SCmd (S) = maxv∈V \{t} dS (v, t) II. BACKGROUND AND M ODEL The wireless networks considered are assumed to consist of selfish nodes that desire to conserve their power by prefering to forward packets to nearer neighbors. As here such a network is studied in the reverse-multicast scenario, it is assumed that all nodes need to have a path to a single destination. This scenario is most common in sensor networks where multiple nodes send the sensed data to a cluster head and there are non-game-theoretic studies of routing protocols for such scenarios[18]. [4] modelled this scenario as a Locally Minimum Cost Forwarding (LMCF) game and showed the existence of Nash Equilibria for this game, focusing on finding Nash Equilibria that are also “good” in the globally (or “socially”) optimal sense of minimizing the total energy expended in the topology. It is demonstrated in [4] that the social objective is consistent with minimizing the related graph-theoretic metrics of stretch and diameter under arbitrary load distributions. In this work, we adopt the LMCF game model and global metrics of stretch and diameter as in [4], with new focus on local computability for random two-dimensional Euclidean1 power instances with powers p = 1, 2 with the latter as the traditional model for wireless configurations. Definition 2.1 (LMCF Game): [4] Given a connected, undirected, edge-weighted graph G = (V, E) (with V = (1, 2, . . . , n), weight function w : E → R2 and designated destination node t, LM CF (G, w, t) consists of the following: Players are nodes v ∈ V \ {t}, each player v with strategy set N (v) = { one-hop neighbors of v}. Given a pure strategy-tuple S = (s1 , s2 , . . . , sn−1 ) refer to GS , the graph induced by S, as the directed graph formed by the set of directed edges of the form (u, su ). Finally, the cost cS (v) of strategy-tuple S to player v is cS (v) = w(v, sv ) if GS contains a path from v to t and ∞ otherwise. For any node v and any strategy-tuple S, denote by dS (v, t) the total weight of the path from v to t in GS if such a path exists3 and ∞ otherwise. Clearly, this distance is minimum in a shortest path tree (SPT) rooted at t. Denote the shortest path distance simply by d(v, t). Two alternative formulations for the Social Cost of a strategy-tuple S for the LMCF Game follow, the first based on the stretch factor of node-destination paths in GS , the second based directly 1 Unless otherwise specified, when referring to Euclidean power graphs within this work, we restrict consideration to two dimensions. 2 In a Euclidean power graph of power p the weight function is simply the pth power of the Euclidean distance between the two nodes. 3 At most one such path may exist.
(1) (2)
As we are concerned with the relative social optimality of a strategy-tuple, we denote the price of a strategy tuple S to be the ratio of the social cost of S over the social cost of the globally optimal strategy, which for the LMCF game is the SPT. In an incentive compatible topology control problem, the goal is to find a “recommendation algorithm” for selfish nodes to forward such that the nodes are in a Nash equilibrium or approximate Nash equilibrium configuration that also performs well socially. Given that our reverse multicast problem is motivated by incentive compatible topology control under information locality constraints4 , we propose a local heuristic algorithm, conveniently called LocalHeur. In [4] the directed Minimum Spanning Tree (MST) was shown to be a Nash Equilibrium though with very bad stretch results, thus motivating the computational feasibility of a Nash Equilibria that is also near globally optimal. It was shown that finding such a globally optimal equilibrium was inapproximable in general graphs and NP-hard even when restricted to three-dimensional Euclidean graphs, and thus an intutive heuristic called DeltaHeur was proposed where each node forwards to its nearest neighbor that does not induce a cycle [4]. This scheme showed improved stretch and diameter results for random Euclidean cases for powers p = 1, 2, 3. The LocalHeur algorithm of this work aims at extending DeltaHeur into a local algorithm whose running time and informational requirements are independent of n. Intuitively, the location based protocol Nearest Forward Progress (NFP) of [7], where each node forwards to its nearest neighbor that minimizes the distance to the destination, is closest in spirit to DeltaHeur with the additional advantage of locality. Location-aware protocols [9] or position based protocols [13] are protocols proposed for mobile ad-hoc networks and sensor networks where location information helps a node in adjusting its transmit power according to the position of its neighbors. In this way, a node can optimize its energy utilization. But, the cost incurred in this process is the overhead involved in propogating the location information. This becomes even more cumbersome when the nodes are mobile. Thus the gain in the expenditure of energy should better this overhead involved which is one of the criteria on which this class of protocols are evaluated. [13], [14] presents a good survey of such protocols. Out of the various location based protocols the greedy forwarding technique matches our assumption of a network with selfish nodes, as all nodes forward to one of its in range neighbor and does not worry about the delivery of the packets [14]. This 4 excepting
only that the destination location is also known.
is similar to our model with an additional constraint that the nodes forward to the nearest of the in-range neighbor. LocalHeur may be considered an application of NFP to a reverse multi-cast scenario. By forwarding to the the nearest neighbor that is in the direction of the destination there is not much deviation from the best-response and also the global performance tends towards optimum. [7] studies NFP and shows better local throughput and normalized average progress (hops per slot) results when compared to MFR and MVR (Most Forward with Variable Radius). This paper intends to understand the closeness to equilibrium and social cost of the NFP scheme when considered as a recommendation algorithm for the LMCF game. III. T HEORETICAL R ESULTS In this section, we prove bounds on the closeness of the LocalHeur configurations to the Nash equilibrium condition. The main theorems concern majority equilibrium and the worst case approximation to a Nash equilibrium. When referring to random Euclidean instances, we restrict our consideration only to points distributed uniformly at random in the two-dimensional unit square. Theorem 3.1: [Majority Equilibrium] In any configuration induced by LocalHeur on a random Euclidean instance, with high probability at least half of the players are playing a best response. Theorem 3.2: [Approximation to Nash] In any configuration induced by LocalHeur on a random Euclidean instance, with √ high probability the worst player’s cost is within O( log n) of the cost of his best response. Before proceeding to prove the theorems, we introduce some notational convenience: Let H(x) denote the halfplane through x defined by all points y such that vector < x, y > has a positive projection onto the vector < x, t >, for destination t. Let nni (x) denote the ith nearest neighbor of x, and let nni,H (x) for function H denote the ith nearest neighbor of x restricted to half-plane H(x). 5 . Note that, except within a negligible constant neighborhood of the destination t for which relevant results hold anyway, nn1,H (x) is with high probability the neighbor to which x forwards under the LocalHeur algorithm. Thus w.l.o.g. we denote LocalHeur(x) = nn1,H (x). Finally to make appropriate game-theoretic analysis, let BR(x) denote the set of points y for which the act of x forwarding to y would constitute a best response for x given the current configuration of all other players. Since BR(x) will be a singleton with probability 1 for random Euclidean instances, we refer to the best response as a single point w.l.o.g.. Note that player x is playing a best response iff x is forwarding to his nearest neighbor which does not already have a path to x (in which case the forwarding would induce 5 Since
the border of the unit square has asymptotically negligible effect on nearest neighbor relations, we ignore border effects w.l.o.g.
a cycle, giving infinite cost). Now we proceed to prove our theorems: Proof of Theorem 3.1: It suffices to show that, for any player x, the probability that x is playing a best response is at least 21 + c for some constant c > 0, as the probability distribution of players playing best response is then bounded below by an i.i.d. binomial distribution with p = 21 + c for which the corresponding result on biased coin flips inducing majority w.h.p. is well known6 . Thus, we proceed to show that for any player x, which is of course a random position in our Euclidean space, the probability that x is playing a best response is at least 58 . Clearly, if nn1 (x) ∈ H(x) then x is trivially playing a best response. Since there is no bias induced by either halfplane, we thus have that P r[LocalHeur(x) = BR(x)] ≥ 12 . What remains now is to demonstrate a constant bias towards choosing a best response. This is accomplished by noting just another disjoint situation, namely the situation that although nn1 (x) ∈ / H(x), that nn2 (x) ∈ H(x) and x = nn1 (nn1 (x)). If we may show that the probability of this situation is bounded below by a constant c > 0 then we are done, and in particular we demonstrate that the probability of this situation is bounded below by 18 . For convenience, let us denote the relevant events as follows: • • •
Let A denote the event that nn2 (x) ∈ H(x). Let B denote the event that nn1 (x) ∈ / H(x). Let C denote the event that x = nn1 (nn1 (x)).
Now we show that P r[A ∧ B ∧ C] ≥ 18 : First note that P r[A|B ∧C] > 21 as the events B ∧C serve to mark out a slightly larger area of H(x) from consideration than the area marked out from consideration within H(x). Namely, two areas become impossible for nn2 (x) to lie within, one area being the circle centered at x with radius d(x, nn1 (x)), and the second area (not disjoint) being the circle centered at nn1 (x) with same radius. The first circle blots out from consideration equal sizes areas in H(x) and H(x), but the second circle lies wholly within H(x). Secondly, note that event C, a reciprocity or mutuality event, is entirely independent of event B. Thus, P r[B∧C] = P r[B]P r[C]. As mentioned previously, P r[B] = P r[B] = 1 1 2 . And, from [16], [17] it follows that P r[C] ≥ 2 . Thus, combining via Bayes’ Rule, we obtain that P r[A∧B ∧C] = P r[A|B ∧ C]P r[B ∧ C] = P r[A|B ∧ C]P r[B]P r[C] ≥ 213 completing our proof. Proof of Theorem 3.2: Let x be a player. From [6] it follows that the distance d(x, nn1 (x)) = Θ( √1n ) with high probability 7 , yielding a lower bound on the cost of the best response. Thus, if we demonstrate that √ log n √ d(nn1,H (x), x) = O( n ) w.h.p., then we are done: For 6 Note that the dependence amongst the player variables actually only acts in the direction of increasing the bias towards playing best response. 7 In fact the result is general for nn (x) with any constant k. k
q n some constant c, consider a radius r = c log πn circle of 2 log n area A = n about point x. We complete the proof by showing that the probability P rempty that the intersection of this area with H(x) is empty (excluding x) is vanishing:
Plot of Stretch(Power=1) 20
15 Stretch
P rempty
MST DeltaHeur LocalHeur
A n−1 ≈ (1 − logn n )n 2) n = ((1 − logn n ) log n )log n ≈ e− log n = n1 → 0
= (1 −
10
5
100
200
300
400 500 600 Number of nodes
700
800
900
1000
800
900
1000
Plot of Diameter(Power=1)
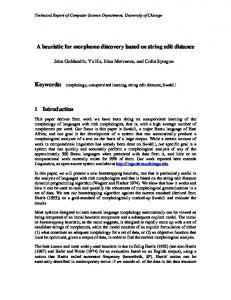
IV. E XPERIMENTAL R ESULTS A. Setup Euclidean power graphs of size n and powers p=1,2 were generated by uniformly distributing n nodes on a 560x560 grid similarly as in [4]. n was varied from 30 to 1000 in steps of 10 thus varying the density of nodes in the grid. In the computation of worst case closeness to best response,a diminishing fraction (square root of the sample size) maximum and minimum outliers were removed. The results thus obtained are shown in Figures 1,2,3,4 and Table 1.
4 3.5
MST DeltaHeur LocalHeur
3 Diameter
Lastly we must note corollaries to the more general case of random Euclidean power graphs, as we especially care to model such graphs of power p = 2 for more realistic wireless applications. From the above proofs and the observation that relative proximity relation remain unchanged upon powering the distance, as well as the result from [6] on moments of the nearest neighbor distance distributions, the following corollaries immediately follow: Corollary 3.3 (following from Thm. 3.1): For any power p, in any configuration induced by LocalHeur on a random Euclidean power p instance, with high probability at least half of the players are playing a best response. Corollary 3.4 (following from Thm. 3.2): For any power p, in any configuration induced by LocalHeur on a random Euclidean power p instance, with high probability the worst p player’s cost is within O((log n) 2 ) of the cost of his best response.
2.5 2 1.5 1 100
200
300
400 500 600 Number of nodes
700
Figure 1. Plot of stretch and diameter for the MST,DeltaHeur and
LocalHeur case when power=1
to DeltaHeur, but still there are only 10 percent of nodes deviating, and the worst case deviation is a very slowly growing function consistent with the theoretical upper-bound from Theorem 3.2. An explanation for comparable stretch and diameter results upon powering the distance is that SPT tends to choose shorter edges at higher powers [4] thus tending towards closer neighbor, while the choice of the next forwarding neighbor in the case of LocalHeur remains the same for all powers. Worst Case no. No of nodes 100 500 1000
of nodes deviating from best-response power=1 power=2 10 8 62 59 98 103 Table I
B. Results From Figure 1 we can infer that prices in terms of both stretch and diameter are asymptotically increasing in case of MST while they are concentrated about small constants for DeltaHeur and LocalHeur. The stretch results of LocalHeur outperforms DeltaHeur almost always by an additive factor of 2. The cost of achieving this is minimal, considering that in all cases only at most 10 percent of the nodes deviate from their best-response (Table 1) and the deviation from best-response is only about 3 percent, which can be inferred by the constant shown in the average closeness to equilibrium plot (Fig 2). This is consistent with Theorem 3.1. For power p = 2, the performance becomes comparable
C OUNT OF DEVIATING NODES
V. C ONCLUSION AND F UTURE W ORK The positive results on global cost and closeness to equilibrium obtained via both theoretical and experimental analysis along with locality of the LocalHeur algorithm present LocalHeur as a good recommendation algorithm for incentive compatible reverse multicast under information constraints. In particular, we note that under the assumption of local information it may be more costly for a player to check whether forwarding to a closer player who is
Plot of Avg Closeness(Power=1)
Plot of Avg Closeness(Power=2)
1.2
1.8 Closeness to Equilibrium Average Closeness to Equilibrium
Average Closeness to Equilibrium
1.18
Closeness to Equilibrium
1.16 1.14 1.12 1.1 1.08 1.06 1.04 1.02
1.7 1.6 1.5 1.4 1.3 1.2 1.1
1
1 100
200
300
400 500 600 Number of nodes
700
800
900
1000
100
WorstCase Closeness 4.5 4 3.5 3 2.5 2 1.5 1 100
200
300
400 500 600 Number of nodes
700
800
300
400 500 600 Number of nodes
700
800
900
1000
900
1000
Plot of Avg Worst Case Closeness(Power=2)
5
Average Worst Case Closeness to Equilibrium
Average Worst Case Closeness to Equilibrium
Plot of Avg Worst Case Closeness(Power=1)
200
900
1000
Plot of average and worst-case closeness to equilibrium for LocalHeur when power=1 Figure 2.
20 WorstCase Closeness 18 16 14 12 10 8 6 4 2 100
200
300
400 500 600 Number of nodes
700
800
Plot of average closeness to equilibrium and average worst-case closeness to equilibrium for LocalHeur when power=2 Figure 4.
Plot of Stretch(Power=2) MST DeltaHeur LocalHeur
12
Stretch
10 8 6 4 2 100
200
300
400 500 600 Number of nodes
700
800
900
1000
Plot of Diameter(Power=2)
configurations satisfy conditions of equilibria under incomplete information, such as Bayes-Nash equilibria. Another theoretical direction for future work is to obtain tighter bounds for the closeness to eqilibrium and also to prove the stretch and diameter results obtained from our heuristic. Practical future directions involve studying the game from a protocol perspective. It will be interesting to study the overhead involved in obtaining the nearest neighbor location information and to analyze the network performance under different scenarios involving mobility.
3.5
Diameter
3
MST DeltaHeur LocalHeur
VI. ACKNOWLEDGEMENT The authors are grateful to both Adam Meyerson for intuitively motivating the problem and Allon Percus for many insightful discussions.
2.5
2
1.5
R EFERENCES 1 100
200
300
400 500 600 Number of nodes
700
800
900
1000
Figure 3. Plot of stretch and diameter for the MST,DeltaHeur and
LocalHeur case when power=2
behind him would create a cycle than it would be to simply forward to the closest player ahead of him, thus opening the very interesting theoretical question of whether LocalHeur
[1] Christoph Amb¨uhl, Andrea E. F. Clementi, Paolo Penna, Gianluca Rossi, and Riccardo Silvestri. On the approximability of the range assignment problem on radio networks in presence of selfish agents. Theor. Comput. Sci., 343(1-2):27– 41, 2005. [2] L. Anderegg and S. Eidenbenz. Ad hoc-VCG: a truthful and cost-efficient routing protocol for mobile ad hoc networks with selfish agents. In MOBICOM 03: Mobile Computing and Networking, pages 245–259. ACM, 2003.
[3] Pilu Crescenzi, Miriam Di Ianni, Alessandro Lazzoni, Paolo Penna, Gianluca Rossi, and Paola Vocca. Equilibria for broadcast range assignment games in ad-hoc networks. In ADHOC-NOW, pages 4–17, 2005. [4] Stephan Eidenbenz, Gunes Ercal-Ozkaya, Adam Meyerson, and Allon Percus. On a locally minimum cost forwarding game. In FOWANC, 2009. [5] Stephan Eidenbenz, V. S. Anil Kumar, and Sibylle Zust. Equilibria in topology control games for ad hoc networks. Mob. Netw. Appl., 11(2):143–159, 2006. [6] D. Evans. A law of large numbers for nearest neighbour statistics. Royal Society of London Proceedings Series A, 464:3175–3192, December 2008. [7] T.C. Hou and V. Li. Transmission range control in multihop packet radio networks. IEEE Transactions on Communications, 34(1):38–44, 1986. [8] Rajgopal Kannan, Sudipta Sarangi, and S. Sitharama Iyengar. Sensor-centric energy-constrained reliable query routing for wireless sensor networks. J. Parallel Distrib. Comput., 64(7):839–852, 2004. [9] Y.B. Ko and N.H. Vaidya. Location-Aided Routing (LAR) in mobile ad hoc networks. Wireless Networks, 6(4):307–321, 2000. [10] Nikolaos Laoutaris, Laura J. Poplawski, Rajmohan Rajaraman, Ravi Sundaram, and Shang-Hua Teng. Bounded budget connection (bbc) games or how to make friends and influence people, on a budget. In PODC ’08: Proceedings of the twenty-seventh ACM symposium on Principles of distributed computing, pages 165–174, New York, NY, USA, 2008. ACM. [11] Xiang-Yang Li, Wen-Zhan Song, and Yu Wang. Efficient topology control for ad-hoc wireless networks with nonuniform transmission ranges. Wirel. Netw., 11(3):255–264, 2005. [12] Hua Liu and Bhaskar Krishnamachari. A price-based reliable routing game in wireless networks. In Proceedings of the First Workshop on Game Theory for Networks, GAMENETS06, 2006. [13] M. Mauve, A. Widmer, and H. Hartenstein. A survey on position-based routing in mobile ad hoc networks. IEEE network, 15(6):30–39, 2001. [14] Aris A. Papadopoulos and Julie A. McCann. Towards the design of an energy-efficient, location-aware routing protocol for mobile, ad-hoc sensor networks. In DEXA ’04: Proceedings of the Database and Expert Systems Applications, 15th International Workshop, pages 705–709, Washington, DC, USA, 2004. IEEE Computer Society. [15] Paolo Santi. Topology Control in Wireless Ad Hoc and Sensor Networks. John Wiley and Sons Inc, 2005. [16] G. Schwarz and A. Tversky. On the reciprocity of proximity relations. Mathematical Psychology, 22:157–175, 1980.
[17] Csar Augusto Sangaletti Terariol, Felipe de Moura Kiipper, and Alexandre Souto Martinez. An analytical calculation of neighbourhood order probabilities for high dimensional poissonian processes and mean field models. J. Phys. A: Math. Theor, 40:1981–1989, 2007. [18] F. Ye, A. Chen, S. Lu, and L. Zhang. A scalable solution to minimum cost forwarding in large sensornetworks. In Computer Communications and Networks, 2001. Proceedings. Tenth International Conference on, pages 304–309, 2001.