Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference Seattle, WA, USA, Sept. 30 - Oct. 3, 2007
TuD1.4
Optimization of Sequencing for Aircraft Arrival Based on Approach Routes Xie Zhang, Xuejun Zhang, Jun Zhang, Bo Liu This paper addresses the aircraft optimal sequencing problem, and analyzes the behaviors and constraints of aircraft arrival to present a mathematical model based on multi-approach routes. In this paper, our algorithm searches for the optimum sequence of aircraft arrivals only among the ‘feasible’ aircraft sequences (it is forbidden that one aircraft overtakes another aircraft belonging to the same arrival route). In order to minimize the total delay, the algorithm proposed in this paper involves optimization of a delay-related cost function, while avoiding excessive sequence order changes from the FCFS order. The paper is organized as follows: Section 2 gives the mathematical model of the sequencing problem that we intend to solve, including detailed explanation of the problem and its formulation as an optimization problem. Section 3 explains how this optimization problem is solved using a combinatorial optimization algorithm. Section 4 validates the model and algorithm with practical data of the Beijing Capital International Airport of CAAC. Finally, Section 5 gives the key conclusions to the paper.
Abstract—This paper presents an optimal sequencing model based on multi-approach routes, and develops a new efficient scheduling algorithm, which uses combinatorial optimization techniques to find the optimal aircraft arrival sequence and the optimal STAs for the aircraft at the runway threshold. Sequencing constraints and minimum safe separation requirements depending on the leading and trailing aircraft types, will be taken care of within the algorithm. The algorithm will also enable prioritization of aircraft according to their importance. Validated with the practical data of the Beijing Capital International Airport of CAAC, the results shows our work is much better than the FCFS solver. .
T
I. INTRODUCTION
ODAY, the arrival sequence is built up by approach control at most busy airports, whose role is to vector incoming aircraft onto final approach in a way that maximizes runway utilization. The separation between two aircraft is affected in a great way by the controllers’ experiences and the pilots’ reactions and may not make full use of the system’s capacity. Additional, due to high controller workload, incoming aircraft are often placed in holding stacks to ensure the necessary separation. Now, the first-come-first-served algorithm computes the STAs with no consideration of optimization of the aircraft arrival sequences. The aircraft are scheduled to arrive at the runway in their predicted order of arrival. Thus, if we could schedule the aircraft to arrive in an optimum order, the total delay is minimized. The aim of this paper is to develop new combinatorial optimization algorithm to solve the aircraft arrival sequencing problem in approach area. Brinton [8] gives a branch and bound algorithm which searches for an optimum aircraft arrival sequence. Carr et al [9,10] address the issue of airline prioritization in scheduling aircraft sequences.
II. OPTIMIZATION MODEL A. Definitions and Notations
F : Set of aircraft, i∈ F . ETAi: Estimated arrival time of aircraft i.
STAi : Scheduled arrival time of aircraft i. D Ti: Delay time of aircraft i. Cat(i) : Type of aircraft i. C : Delay cost per unit. D C i : The cost coefficient of aircraft i when it is delayed, D C i = D C [Cat(i)] .
AC i: The cost coefficient of aircraft i when it is advanced, AC i = AC [Cat(i)]. PC i: Priority coefficient of aircraft i.
Manuscript received Apr 1, 2007. This work was supported by the China National Natural Science Foundation under Grant NSFC60572178 and China National Science Foundation for Distinguished Young Scholars under Grant 60625102. X. Zhang is with the School of Electronic and Information Engineering, Beihang University, Beijing 100083, China (e-mail:
[email protected]) X. J. Zhang is with the School of Electronic and Information Engineering, Beihang University, Beijing 100083, China (e-mail:
[email protected]) J. Zhang is with the School of Electronic and Information Engineering, Beihang University, Beijing 100083, China (e-mail:
[email protected]) B. Liu is with the Institute of Microelectronics of Tsinghua University, Beijing 100084, China (e-mail:
[email protected]).
1-4244-1396-6/07/$25.00 ©2007 IEEE.
λij : Position relationship between aircraft i and j. ARi : Arrival route of aircraft i. M SSij: Minimum safe separation between aircraft i and j,
M SSij = M SS[Cat(i),Cat( j)] . 592
λij
Δ ij : Extra separation between aircraft i and j.
if λij = 1, it denotes that aircraft i will land before aircraft j;
Ei : The earliest arrival time of aircraft i. Li : The latest arrival time of aircraft i (take no account of air
if λij =
holding). TA : Time advanced. TD : Time delayed. TAm ax : The maximum value of TA.
then
controllers according to their own experiences, and
then
i
i
(1)
+ PCi)δ (D Ti) − ( ACi − PCi)δ (− D Ti)]C
i∈F
⎧1,x ≥ 0 (2) ⎩0,x < 0 In the second objective, D Ti = STAi − ETAi, D Ti>0
δ ( x) = ⎨
denotes aircraft i is delayed; according to schedule; of schedule. delay, and
D Ti=0 denotes aircraft i lands
D Ti STA j
λij = ⎨
λij + λ ji = 1,i≠ j;
M SSij
Aircraft will land on the runway following different arrival routes, and usually one airport owns more than one arrival route. Taking off and landing phases are the most dangerous phases in the flight process, so aircraft are able to get much more strict constraints at taking off and landing phases. For instance, one aircraft overtakes another aircraft in same arrival route. We should avoid this when it is possible, because this action will not only increase the difficulty of control but also improve the flight cost, and the most importance is this action will cause low safety in the congested airspace. Constraint 3 shows it is forbidden that one aircraft overtakes another aircraft belonging to the same arrival route. For this, Aircraft are adjusted among different arrival routes by optimization algorithm, forming an equitable and ordered arrival queue. 4) Arrival Time Window Constraint: Each aircraft has two representative arrival times: earliest arrival time and latest arrival time. The aircraft is allowed to arrive in the interval between these two times. Aircraft can not put up acceleration and deceleration in large range duo to strict restriction in the approach area and airplane’s own capability. Aircraft usually take enough fuels, and aircraft can be put “on hold” for quite a long time, so we can get:
Based on the first objective, the second objective (the sum of delay cost) is as follows:
∑ D T [(D C
(4)
is determined by the ranking and type of aircraft. 3) Same Air Route Constraint: if ARi − AR j = 0 and ETAi < ETA j
i∈F
Minimize:
STA j − STAi ≥ M SSij + Δ ij , i≠ j;
Constraint 2 shows that if aircraft I land before aircraft j, and then the separation between aircraft I and j must satisfy the MSS (minimum safe separation) plus extra safe separation requirements. Δ ij is determined by air traffic
B. Objective Functions The aircraft sequencing problem involves many aspects, and each can be considered as objective alone, but in the final analysis following two questions are the most important aspects. On one hand, always we hope that aircraft could land on the runway as soon as possible, because this will not only increase the operation speed (improving efficiency), but also decrease the holding time of aircraft in approach area (enhancing safety, reducing cost). On the other hand, we hope to minimize the operation cost of aircraft, and usually we can find that same delay cause different cost due to differences between aircraft such as capability and significance. Therefore, we choose the sum of landing time as the first objective: Minimize: i
0 , it denotes that aircraft i will land after aircraft j.
2) Safe Separation Requirement: if λij = 1
TD m ax : The maximum value of TD.
∑ STA
denotes the relationship between aircraft i and j,
(3)
593
III. SOLUTION APPROACH A. Hierarchical Programming Method In this model, hierarchical programming method is applied. Assume there are m goals ( { f1(x),f2 (x),L ,fm (x)}) to be optimized, which are ranked by their importance. First, the problem shown in formula (7) will be solved.
r m in f1(x)
stg .. i(x)≥ 0,i= 1,2,L n
(7)
ai ≤ xi ≤ bi The solution can be written as
m in f1(x)= f1∗ (x), where x∈R
r R = {x |gi(x)≥ 0,i= 1,2,L ,n}. Then we will solve the problem as formula (8) showed.
r m in f2 (x) (8) r stx .. ∈ R1 r r ∗ where R1 = R ∩ {x |f1(x)≤ f1 }. The other m-2 goals will be solved in the same way. Thus, the optimization of the lower level goals will not affect the minimization of the upper level goals. We have the following optimization problem to solve:
m in ∑ STAi i∈F
m in ∑ D Ti[(D C i + PC i)δ (D Ti) − ( AC i − PC i)δ (− D Ti)]C i∈F
,
⎧1,x ≥ 0 ⎩0,x < 0
δ ( x) = ⎨
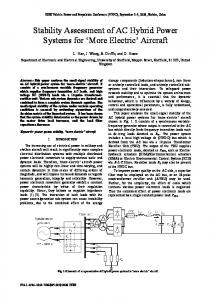
model. Another kind of noticeable method is genetic algorithms (GAs). GA is a random search algorithms which have been derived based on the ‘Darwin’s theory of survival of the fittest’ [1, 2], and is able to adapt to nonlinearities and discontinuities commonly found in engineering systems [3]-[6]. GAs operate on a population of trial solutions that are initially generated at random. It seeks to maximize the fitness of the population by selecting the fittest individuals from the population and using their ‘genetic’ information in ‘mating’ operations to create a new population of solutions. The procedure continues until the termination condition is satisfied. The following is the flowchart of standard GA. Figure 1 illustrates the fundamental structure of genetic algorithms. Potential solutions of phenotype are coded into individuals of genotype to form an initial population. In this model, the sequence of landing is randomly generated in each individual to form the initial population. Each individual in the population is evaluated using its fitness. Through reproduction, crossover, and mutation, the population of the next generation is created. In the above process, crossover operator is realized by choosing one point in accordance with a uniformly distributed probability over the length of the individual strings (parents) and cutting them in two parts, accordingly. The new individuals (offspring) are formed by the juxtaposition of the first part of one parent and the last part of the other parent. Standard mutation operator [7] is used in this model. The procedure continues in fashion, and when the termination condition is satisfied, the best individual obtained is regarded as an optimal or approximate optimal solution to the problem. The introduction of the basic operators in GA is detailed in [7].
subject to:
⎪⎧1,STAi < STA j , λij + λ ji = 1,i≠ j; ⎩⎪0,STAi > STA j
λij = ⎨
if λij = 1 then if ARi −
STA j − STAi ≥ M SSij + Δ ij,i≠ j;
AR j = 0 and ETAi < ETA j then STAi < STA j,i≠ j;
STAi ∈ [Ei + NT ,Li + NT ] , Ei = ETAi − TAm ax ,Li = ETAi + TD m ax ; The 2nd, and 4th constraints will be solved in the initialization process, which will be described in the following passage. B. Solution Algorithms To get global optimization of the proposed model, a possible way is to apply traditional methods, such as Quasi-Newton or convergent descent method. However, this kind of methods requires differentiable functions and regular searching space, which is not suitable for the proposed
Fig 1 Procedures of GA
GA is an efficient algorithm for non-constrained optimization problem, but in this study, the models are constrained ones. The penalty technique is perhaps the most common approach used in genetic algorithms for constrained optimization problems. In essence, this
594
C. Solution of this model In this study, the 4th constraint is actually the bounds of the variables, so it should be processes in the initialization process. The 3rd constraint, however, can be used as a separate constraint directly, but 29 constraints will be added to the model, which may make the solution more difficult. Here, we will first rank the planes by air route, and replace the old possible solution by the ranked possible solutions. The 1st and 2nd constraints can be combined together. For the first goal, we choose the sequence of landing as the decision variable, so the landing time can be derived. Therefore, the constrained numerical constrained optimization problem is transformed to a non-constrained combinatorial optimization problem. This technique drastically decreased the difficulty of the problem. For the second goal, “GA + Penalty Function” method is used, which is detailed in the previous passage.
technique transforms a constrained optimization problem into an unconstrained one by penalizing infeasible solutions, in which a penalty term is added to the objective function for any violation of the constraints. By using constant penalty method, a penalty function is as follows: Φ(x)= f(x)+ λ × |m in(g(x),0)| (9) for the optimization problem:
m in f(x) subject to g(x)≥ 0
(10) If g(x) conforms to the constrained optimization, the penalty function is 0; and if g(x) is smaller than 0, the penalty function is sufficiently large. Owing to this, the fitness of the individuals in the latter condition will be lowered drastically, and the corresponding individuals are less likely to be selected to construct the next generation.
Table IV: Results of the FCFS Sequencing and Optimal Sequencing Algorithm
Total Delay Cost (FCFS): 34121;
Total Delay (FCFS): 11655s;
Total Delay Cost (Optimal): 24478;
Total Delay (Optimal): 8817s;
595
IV. RESULTS According to the model in Section 2, a set of practical data from the Beijing Capital International Airport of CAAC was used to validate the model in Table 4. The Beijing Capital International Airport of CAAC owns three arrival routes and three departure routes. Among the three arrival routes, No.1 arrival route account for 60% of the total arrival traffic flow, and No.2 and No.3 route each account for 20% of the total arrival traffic flow [15]. Initial parameter settings: 1) Minimum Safe Separation The minimum safe separation constraints used in this paper are in terms of ‘seconds-in-trail’ for different pairs of aircraft-types as given in Table I. Table I: Minimum Safe Separation for different pairs of aircraft-types
arrival based on different approach routes. In contrast to the existing sequencing and scheduling studies where aircraft arrival belong to the same route, we consider the more realistic situation where aircraft arrival belong to different approach routes. We presented the mathematical model of the problem and developed a combinatorial optimal algorithm to solve it. Validated with the practical data, the model has good computational performance and the results shows our work is much better than the FCFS solver. However, the model is a static model. It can only represent the static simulation with given aircraft but not the dynamic simulation with aircraft arrival. An item for future work is to improve our model and test the sequencing algorithm in a dynamic simulation, which will have aircraft being added to the queue as they arrive and being removed from the queue as they land. We are currently working on the problem and results will be published in a subsequent paper. REFERENCES [1]
2) Priority Coefficient According to the importance of each aircraft, 4 tiers are used to identify their priority in Table II.
[2]
Table II: Priority Coefficient for different aircraft
[4]
[3]
[5] [6]
3) Cost coefficient The cost coefficients used in this paper are dependent on different type of aircraft as given in Table III.
[7] [8]
Table III: Cost Coefficients for different type of aircraft [9]
TA
TD
Δ
ij m ax =40s, m ax =60s, T =100s, =0s, C=1 4) As shown in table IV, plenty of traffic conflicts can be found in the initial queue, due to the lack of safe separation ensures. Table IV also shows the results of applying FCFS Sequencing and Optimal Sequencing Algorithm to the aircraft, respectively when all aircraft are assigned different priorities. From the new sequence, it is obvious that overtakes take place between aircraft on different approach routes. Aircraft belonging to the same approach route obey the first-come-first-served principle. As a result, the optimal algorithm is much better than the FCFS algorithm. The last aircraft is scheduled to land 149 seconds earlier as compared to the FCFS algorithm. There is a 2838 seconds total delay reduction and 94.6 seconds on average. The total delay cost has been reduced nearly 30%.
V. CONCLUSION
[10] [11] [12]
[13]
[14]
L Davis, Handbook of genetic algorithms. New York: Van Nostrand, Reinhold; 1991. D. E Goldberg, Genetic algorithms in search, optimization, and machine learning. Addison-Wesley; 1989. R. Bauer, Genetic algorithms and investment strategies, John Wiley & Sons, New York, 1994 B. Bhanu, and S. Lee, Genetic learning for adaptive image segmentation, Kluwer Academic Publishers, Norwell, MA, 1994 L. Chambers, Practical handbook of genetic algorithms: applications, Vol.1, CRC Press, Boca Raton, FL. 1995 Y. Davidor, Genetic algorithms and Robotics, World Scientific, Singapore, 1991 Z. Michalewicz, Genetic Algorithms + Data Structures = Evolution Programs, Springer-Verlag, Berlin, 1992; 2nd extended edition, 1994; 3rd revised and extended edition, Berlin 1996. Brinton, C. R., “An Implicit Enumeration Algorithm for Aircraft arrival Scheduling,” Proceedings of the Eleventh Digital Avionics Systems Conference, Seattle, WA, October, 1992. Carr, G. C., H. Erzberger, and F. Neuman, “Airline Arrival Prioritization in Sequencing and Scheduling”, Proceedings of the Second USA/Europe Air Traffic Management R&D Seminar, Orlando, FL, December 1-4, 1998. Carr, G. C., H. Erzberger, and F. Neuman, “Delay Exchanges in Arrival Sequencing and Scheduling”, Journal of Aircraft, Vol. 36, No. 5, pages 785-791, September-October, 1999. Hu, X., and Chen, W., “Receding Horizon Control for Aircraft Arrival Sequencing and Scheduling”, IEEE Transactions on Intelligent Transportation Systems, Vol.6, No. 2, June 2005. Robinson, J. E. III, Davis, T. J., Isaacson, D. R., “Fuzzy Reasoning Based Sequencing of Aircraft arrival in the Terminal Area”, AIAA Guidance, Navigation and Control Conference, New Orleans, LA, August 1997. A. M. Bayen, C. J. Tomlin, Y. Ye, J. Zhang, “An Approximation Algorithm for Scheduling Aircraft with Holding Time”, 43rd IEEE Conference on Decision and Control, Atlantis, Paradise Island, Bahamas, December 14-17, 2004 Fahle T, Feldmann R, Go tz S, et al. “The aircraft sequencing problem”, Computer Science in Perspective, LNCS [C ]. Berlin Heidelberg: Sp ringer2Verlag, 2003.
[15] B. Jiang, M. Hu, Y. Tian, W. Huang, “Simulation method of airspace capacity evaluation at terminal area”, Journal of Traffic and Transportation Engineering, Vol.3, No.1, Mar.2003. (in Chinese)
In this paper, we studied the sequencing problem of aircraft
596