Page 1 Least squares solution with equality constraints l Ax v = + , 0 ...
Recommend Documents
Abstract: In this paper we introduce the quadratically constrained integer least-squares problem and show how the LAMBDA method can be used to solve it for ...
Apr 24, 2013 - λ) with the parameters c and λ sliding from zero to infinity and show that .... thus, bridge OMP[17] and âp-regularized least squares problems.
Least Squares Solution and Pseudo-. Inverse. Introduction. In this notebook we will explore how to solve linear systems of equations given by. (1). A x b.
problem subject to weighted/hard linear(ized) equality constraints on ... Because the formulation is based on the standard least squares theory, the method.
The method is based on the fact that a minimum sum of squared differences ... non-linear least squares problem in which case a standard solution method is not ...
Jun 23, 2011 - Section 6 provides a second Bayesian alternative resulting ... into Equations 3 and 4 and following the example in Burr et al. [2] with y1 = 1.5 ...
which simplifies to: min x. xT λ xλ â xT λ DT Aλ â AT λ Dxλ + AT λ Aλ + αLx1. (2). Note that,. AT λ = (xOLS λ. )T DT. Using this result and Aλ = DxOLS λ we arrive at.
Linear matrix equations play a cardinal role in control theory, signal ... least-squares problem associated with a linear system by using the “vec(.) ...... experiments in this section were computed in double precision with some Matlab codes.
the lifetime is found to v 0 v 1 v 1 vary significantly for the isotopomers. Combining the data with existing oscillator strengths, predissociation probabilities within ...
THE LOOPY BELIEF PROPAGATION APPROACH ... by a maximization over all the symbols in A. In a loop- ... In a loop-free MRF graph the max-product.
Jan 30, 2018 - results in various visual recognition tasks. This paper proposes ... As an important application of computer vision, video-based recognition such ...... rithms on matrix manifolds, Princeton University Press, Prince- ton, NJ, 2008.
standing and extracting information from these large data sets is pivotal ... in n, but requires either storing the entire kernel matrix or ... s usage is very inefficient.
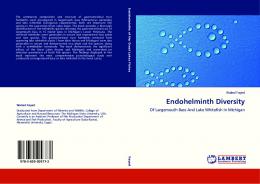
species diversity in 108 bony fish species residing in Argentina, Chile, ...... as the burbot, Lota lota, in Ontario, Canada (Anthony 1987), and Maine (Meyer. 1954).
annual broadleaved weeds, including Consolida regalis Gray. During stem node stage treatment, a reduction in the efficacy of all herbicides and herbicide tank ...
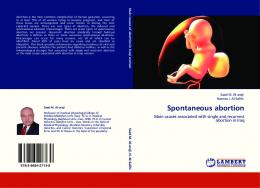
can follow even late gestational infection (Robert et al., 2006). The cause for that ...... Bowie , W . R .; King , A . S .; Werker , D . H .; Isaac- Renton , J. L.; Bell , A. and Eng ,. S . B . (1997). .... Gibson, C.L.; Gray, L.J.; Bath, P.M. and M
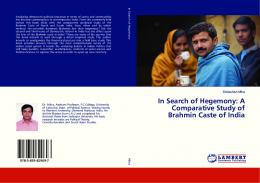
I sincerely express my heart-felt gratitude to all my colleagues, official staff members and ...... namely, Shiva, Vishnu, and Shaktiâhas lent unity to an extremely ...... Ganga and has been held sacred by the Hindus since very early times. The.
and otherwise used by people who have the right to do so" ( UK Online for. Business ...... selection and software metrication are investigated. None of these ...
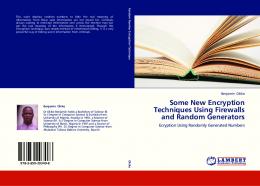
be attributed an unique ID as per its uniqueness be it digital signature or finger print ... both sending and receiving operations for decimal forms of the elements ...
The aquatic veterinary practice have witnessed the publication of many diagnostic manuals ... students and aquatic veterinary technicians . NOTE: The mention of ..... leaves fish body, so you will not be able to diagnose those diseases. ..... stained
For example, the word µBY' is represented in two signals. The code ...... be attributed an unique ID as per its uniqueness be it digital signature or finger print or.
the potency of people's accounts of their argumentative exchanges in a way that ...... common types just mentioned, and then survey other proposed types (For ...... Petitioner and Respondent. Respectively : Philips and Katyal vs. O'Grady.
Dec 1, 2007 - Second paper is by Rahul Singh titled Medical Tourism in the ...... Yuvraj, Hotel Chinar, Hotel Asoka, Ranchi Gymkhana Club, Ranchi Club, etc.
ators and a sharp error measure. One of the potential drawbacks, especially in three dimensions, is that mass conservation is achieved only in a least-squares ...
Tamoxifen and Afimoxifene. Results of copper complex was highly significantly, thus led to synthesis, characterization and pharmacological evaluation of ...
Page 1 Least squares solution with equality constraints l Ax v = + , 0 ...
Least squares solution with equality constraints l Ax v. = + ,. 0. Cx d. + = 2 (. ) (. ) (. ) 2 (. ) T. T. T. T v Pv k Cx d l Ax P l Ax k Cx d. Φ = +. + = -. -. +. +. 2(. ) ( ) 2. 0. T.
Least squares solution with equality constraints
l = Ax + v ,
Cx + d = 0
Φ = vT Pv + 2k T (Cx + d ) = (l − Ax)T P(l − Ax) + 2k T (Cx + d ) ∂Φ = 2(l − Ax)T P(− A) + 2k T C = 0 ∂x
⇒
AT PAxˆ + C T k = AT Pl
∂Φ = −2(Cx + d )T = 0 ∂k
⇒
Cxˆ + d = 0
xˆ = ( AT PA)−1 AT Pl − ( AT PA) −1 C T k
Cxˆ + d = C ( AT PA) −1 AT Pl − C ( AT PA)−1 C T k + d = 0 k = [C ( AT PA)−1 C T ]−1 C ( AT PA) −1 AT Pl + [C ( AT PA)−1 C T ]−1 d xˆ = ( AT PA)−1 AT Pl − ( AT PA) −1 C T {[C ( AT PA)−1 C T ]−1 C ( AT PA) −1 AT Pl + [C ( AT PA) −1 C T ]−1 d } xˆ = ( AT PA)−1 AT Pl − ( AT PA) −1 C T [C ( AT PA)−1 C T ]−1 C ( AT PA)−1 AT Pl + d
xˆ0 = ( AT PA)−1 AT Pl
unconstrained solution
xˆ = xˆ0 − ( AT PA) −1 C T [C ( AT PA) −1 C T ]−1[Cxˆ0 + d ] Covariance propagation:
l = Ax + v
v ~ (0,σ 2 P −1 ) , Cv = σ 2 P −1
AT PA ≡ N
xˆ = N −1 AT P( Ax + v) − N −1C T [CN −1C T ]−1 CN −1 AT P( Ax + v) + d =
= N −1 AT PAx + N −1 AT Pv − N −1C T (CN −1C T )−1 CN −1 AT PAx + CN −1 AT Pv + d = = x + N −1 AT Pv − N −1C T (CN −1C T ) −1 Cx + CN −1 AT Pv + d = = x + I − N −1C T (CN −1C T )−1 C N −1 AT Pv
C xˆ = {[ I − N −1C T (CN −1C T ) −1 C ]N −1 AT P} Cv {[ I − N −1C T (CN −1C T )−1 C ]N −1 AT P} , Cv = σ 2 P −1 T
1
σ
2
Cxˆ = {[ I − N −1C T (CN −1C T ) −1 C ]N −1 AT P} P −1 {[ I − N −1C T (CN −1C T ) −1 C ]N −1 AT P} =
= {[ I − N −1C T (CN −1C T ) −1 C ]N −1 AT P} P −1 { PAN −1[ I − C T (CN −1C T )−1 CN −1 ]} =
T
= { I − N −1C T (CN −1C T ) −1 C} N −1 AT PP −1 PAN −1 { I − C T (CN −1C T ) −1 CN −1} = = { I − N −1C T (CN −1C T ) −1 C} N −1 { I − C T (CN −1C T ) −1 CN −1} =
= N −1 − 2 N −1C T (CN −1C T )−1 CN −1 + N −1C T (CN −1C T ) −1 CN −1C T (CN −1C T ) −1 CN −1 = = N −1 − N −1C T (CN −1C T ) −1 CN −1 Cxˆ = σ 2 N −1 − N −1C T (CN −1C T ) −1 CN −1
σˆ 2 =
vˆT Pvˆ (l − Axˆ )T P(l − Axˆ ) = f f
f =degrees of freedom = number of observations – number of unknowns + number of constraints
Cxˆ = σ 2 N −1 − N −1C T (CN −1C T ) −1 CN −1
----------------------------------------------------------------------------------------Otherwise: C x0 = σ 2 ( AT PA) −1 ≡ σ 2 N −1 x = x0 − N −1C T [CN −1C T ]−1[Cx0 + d ] = [ I − N −1C T (CN −1C T ) −1 C ]x0 − N −1C T (CN −1C T )−1 d C x = [ I − N −1C T (CN −1C T )−1 C ]Cx0 [ I − N −1C T (CN −1C T ) −1 C ]T 1
σ
2
Cx = [ I − N −1C T (CN −1C T ) −1 C ]N −1[ I − C T (CN −1C T )−1 CN −1 ] =
= N −1 − 2 N −1C T (CN −1C T )−1 CN −1 + N −1C T (CN −1C T ) −1 CN −1C T (CN −1C T ) −1 CN −1 = = N −1 − 2 N −1C T (CN −1C T ) −1 CN −1 + N −1C T (CN −1C T ) −1 CN −1 = Cx = σ 2 N −1 − N −1C T (CN −1C T ) −1 CN −1
Use of matrix identity:
( A + C T KC ) −1 = A−1 − A−1C T ( K −1 + CA−1C T ) −1 CA−1