The application of the satellite service magnetometers for. IGRF model ... microsatellite, having resolution of the magnetic field measurements along each.
Possibility of the IGRF model upgrade using microsatellite service magnetometer S. Belyayev, F. Dudkin, V. Korepanov (M1), O. Leontyeva Lviv Centre of Institute of Space Research, 5-A Naukova Street, Lviv, 79000, Ukraine ABSTRACT The results of experiments with onboard attitude control magnetometer of the satellite EGYPTSAT are discussed. The application of the satellite service magnetometers for IGRF model upgrading has been proposed. 1. INTRODUCTION The remote sensing microsatellite EGYPTSAT was launched in 2007 at the circular orbit with altitude ~ 660 km and inclination 98.1°. Its main goal was the imaging of specified parts of the globe with resolution about 6 meters. Besides, a new technology of attitude control was implemented in this spacecraft allowing the orientation controlling using the onboard magnetometer only [1]. Because of this a new more reliable and sensitive service magnetometer was developed for the EGYPTSAT microsatellite, having resolution of the magnetic field measurements along each component equal to 1.0 nT and few arcminutes axes orthogonality error (LEMI-016 ). Such high resolution inspired the authors to carry out the experimental test of the possibility to upgrade the model of International Geophysical Reference Field (IGRF) of the Earth using the data of this magnetometer. The positive results of such test may have considerable scientific and applied interest. There is a great deal of LEO satellites having a service magnetometer onboard. Collecting their synchronized multi-positional measurements results may give considerably more detailed structure of Earth’s magnetic field at every time moment what in its turn is very important for the study of macroscale structures in ionospheric plasma, Earth’s magnetic field model and IGRF improvement etc. 2. EXPERIMENT CONDITIONS For investigation of the possibility to use the attitude control magnetometer in such measurements two experiments were executed with EGYPTSAT satellite in 2007. To have a ground reference, every of these experiments were carried out when the satellite passed above ground geomagnetic observatories: the first one (October, 23) - above Ukrainian Antarctic station “Academician Vernadsky” (AIA observatory) and the second one (November, 16) - above CARISMA magnetometers array (Canada). The satellite was in polar sun-synchronous, almost circular, orbit (667 km apogee, 657 km perigee) which parameters were known with error about 0.1 km by height and 0.1 degree by latitude and longitude. The onboard magnetometer was switched on only once per 4 seconds and, in the interval between magnetic field measurements, the torkers for satellite attitude control were activated for 2 seconds.
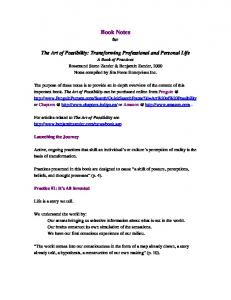
The onboard magnetometer data were presented in the satellite frame of reference and the first task was their transformation for each point in the geophysical reference frame (Fig. 1), in which IGRF model is given, as well as the ground magnetometers data. It was accepted that x-axis was directed along the satellite orbit, y -axis - perpendicularly to x-axis and directed clockwise, z-axis was pointed to nadir. The rotation of x-axis for every point to the geographic meridian was made according to the expressions:
where Bxs , Bys - horizontal components of the magnetic field, which measured by onboard magnetometer, φi , λi , i= 1, 2, 3 - geographic latitude and longitude of i-point (Fig. 1); for this presentation φ3 = 0.5π (the North geographical Pole Ngp).
Fig. 1. Transformation of the magnetometer data from the satellite intrinsic frame of reference into geophysical frame of reference 3. OBTAINED RESULTS At first, the magnetic field components, which measured by EGYPTSAT magnetometer and those calculated from IGRF-10 model were constructed for the same satellite position and computed. For this the difference of these both presentations was calculated for the first experiment (Fig. 2). Here the dots show the difference between of data of the AIA geomagnetic observatory during the satellite passage above this observatory and those, obtained from the IGRF model.
Fig. 2. Result of the total additional turn for differences of measured and IGRF-10 values of magnetic field
566
To minimize the r.m.s. error during these differences calculations, here the additional rotation of onboard magnetometer axes was executed in horizontal plane for the angle δa and of vertical axis for the angle δβ using the expressions:
(2)
Geomagnetic activity index at the experiment time was Kp=2.7. The same calculations were made for the second orbit section, located above CARISMA magnetometers chain and the same differences for the nearest to the satellite orbit projection on the ground magnetic station FSMI were constructed in the vicinities of this station (Kp-index value was 0.7). As it may be seen for both cases in spite of rather big deviations of the measured components data, from these calculated from IGRF model, the deviations of the magnetic field absolute values are rather small and practically the same as for satellite and ground measurements (see Fig. 3).
Fig. 3. Deviation of the onboard and ground magnetometers (FSMI station) readings from IGRF-10 values The same processing method was applied, for comparison, to the results of magnetic field measurements with the high class scientific magnetometer onboard geomagnetic satellite CHAMP [2] during its passage along close to the EGYPTSAT part of orbit on October, 23, 2007 with almost similar Kp=1.3 (March 02, 2005, 21:34:58 - 22:03:37). The analysis of the obtained results (Fig. 4) shows that in this case the values of deviations are pretty similar.
567
Fig. 4. Differences of the magnetic field components measured by CHAMP onboard magnetometer and IGRF-10 values for the first experiment 4. RESULTS DISCUSSION AND CONCLUSION The obtained results show rather big deviations of the onboard magnetometer’s readings, especially of their components, from IGRF model. We may suppose that these deviations can be decreased if to reduce the error of the satellite positioning and orientation. Also the considerable distance between ground satellite path and reference ground geomagnetic station location gives a contribution in this deviation. Taking into account all these error sources, the minimal possible total error δ may be estimated from the expression: δ =δIGRF + δp + δKp + δip
(3)
where δIGRF - IGRF model error, δp - satellite position error, δKp - error due to geomagnetic activity influence, δip - error that caused by the influence of the ionospheric plasma current structures. Thorough the calculations of all these factors influence may help to reduce the total error δ up to reasonable value. Especially efficient for increasing of the orbital measuring precision with onboard service magnetometers will be deployment in the same orbit of two satellites separated by a distance up to several hundred kilometers. 5. ACKNOLEDGEMENTS These works were supported by NSAU contract 1-05/08. The authors are very thankful to the colleagues from “Yuzhnoe” design office, (Dnepropetrovsk, Ukraine), National Antarctic Centre of Ukraine and National Centre of Space Control (Evpatotiya, Ukraine) for the organization of this experiment and delivered data. 6. REFERENCES [1] Belyayev, S., Efimenko, N., Korepanov, V., Kudin, N. Satellite magnetic orientation and stabilization system. Small satellites for Earth observation. Proceedings of the 3rd International Symposium of the IAA (Berlin, April 2-6,2001), 407-410. [2] Korepanov, V., Dudkin, F., Belyayev, S., Leontyeva, O. Experience of satellite attitude control magnetometer use for scientific purpose. XIIIth IAGA Geomagnetic Observatory Workshop. Conference Program and Abstracts. Boulder and Golden, Colorado, USA, June 9 - 18, 2008, p.42.
568