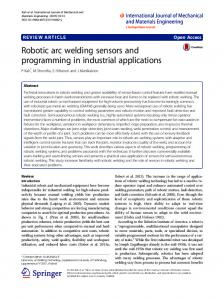
environments, using standard visual programming tools. (Microsoft Visual C++ and Basic) and mathematical packages (Matlab). Within the paper we focus ...
Programming Robotic & Automation Applications from Matlab Fernando Brandão, João Vaz, J. Norberto Pires Mechanical Engineering Department University of Coimbra Polo II Campus, 3030 Coimbra, Portugal brandão, vaz, norberto @robotics.dem.uc.pt
Correspondi ng Author: J. Norberto Pires Mechanical Engineering Department University of Coimbra Polo II Campus, 3030 Coimbra, Portugal
Tel. 239 790712 Fax. 239 790701
Programming Robotic & Automation Applications from Matlab Fernando Brandão, João Vaz, J. Norberto Pires Mechanical Engineering Department University of Coimbra Polo II Campus, 3030 Coimbra, Portugal brandão, vaz, norberto @robotics.dem.uc.pt
Abstract In
this
is one of those applications that provide to the user a paper
object-oriented and distributed
powerful mathematics environment, very popular for
architecture to interface Robotic & Automation (R&A)
teaching and research tasks on R&A. And that is so
equipment with a Personal Computer (PC), introduced in
because Matlab is a powerful linear algebra tool, with a
[12], is used from Matlab [16]. The above mentioned
very good collection of toolboxes that extend its basic
architecture
Win32
functionality. In this paper we present a toolbox that
environments, using standard visual programming tools
enable access to real R&A equipment from the Matlab
(Microsoft Visual C++ and Basic) and mathematical
shell. If used in conjunction with a robotics toolbox
packages (Matlab). Within the paper we focus mainly on
[2][3][4] it will extend significantly their application, i.e.,
using Matlab with the presented architecture. Application
besides robotic simulation and data analysis the user can
examples using an industrial robot are also presented.
interact on-line with the equipment he is using. Our
was
an
designed
to
work
under
personal experience with this tool shows its usefulness for Keywords :
Robotics,
Automation,
Software
Object-oriented
for
Robotics
programming,
and
research applications, but also for teaching projects. With
Matlab
students, using Matlab means taking advantage of the less
toolbox.
training required to start using it, if we compare with other programming environments and languages we also
1. Introduction.
use (Microsoft Visual C++ or Visual Basic).
Current Personal Computers have sufficient computing power that candidate them to be used as host computers in
2. Software design & interfacing Matlab.
industrial
for
Using some equipment from a computer, i.e., exploring
monitoring applications, but also for programming and
the equipment functionality remotely in a distributed way
control applications. Specially they can be used to
means writing specific code and data structures to handle
program and control R&A equipment even when they are
all its functionality. If we want to be able to distribute the
organized in Flexible Manufacturing Cells (FMC) [12].
code and use it in several applications in a easy way, the
Using a PC is also taking advantage of the enormous
best solution is to build a software component (using
variety of applications available on those platforms for
ActiveX [5] or JAVA [6]) and integrate it with each
programming, data analysis and presentation, etc. Matlab
project. Fortunately there are many development tools,
distributed
environments,
not
only
most of them visual, that can act as containers of software built
using
the
above
DDE Client Applications DDE Server
mentio ned
technologies.
OLE ActiveX Force/Torque Sensor Object
Force/Torque Sensor Board
offer to Matlab a collection of services to be acces sed
OLE
lot of solutions in the market that use DDE to expose
ActiveX Force/Torque Sensor Object
services to other applications [14][15].
RPC Server
Messages
using the Matlab DDE implementation [1][7]. There are a
DDE Services
ActiveX Robot Communication Object
Since Matlab is an interpreted language and can act as Board NT Kernel Driver
DDE Callback Function OLE
Interfacing Matlab may be done just by using DDE [5].
DDE client, it is fairly easy to build a DDE server that can
DDE
Portm aper
components
Windows Dialog OLE
RP C Ca Sy lls nc .A nsw ers Asy nc. M sg.
Robot Control System
RPC Server Programs
alls CC RP ers nsw c. A Syn
ActiveX Robot Communication Object
Another way is by using Matlab MEX functions, embedding into Matlab the software components or
Win32 Application
libraries used to explore the equipment functionality.
Fig. 1 - Basic software architecture [12][16].
Services (client and server sides) can be thought as "options" of a multi-parameter driven function that can be
In this paper we focus only on the interface to an
called
data
industrial robot (ABB IRB1400 using the S4 control
representation protocols. Implementing service calls using
system). The interested reader can find the interface to
MEX functions is straightforward. In conclusion, the
other equipment in [12][16], and download freely this
basic idea is simple. For each equipment we need to
software
design and build a server (if it is not yet available) to
http://www.dem.uc.pt/norberto/.
remotely
using
some
calling
and
and
other
related
tools
from
expose the equipment functionality as remote services. The technology to build the server is highly dependent on
3. Interfacing an Industrial Robot.
the equipment resources and computing facilities, but if
The module briefly presented here (MATABBS4) [16]
possible some kind of RPC (Remote Procedure Calls) [8]
works with any ABB robot equipped with the S4
mechanism should be used. Software controls that explore
controller [9]. It implements calls to all services available
these services should then be available as basic tools to
from the robot controller (RPC servers). ABB S4
develop remote and distributed applications using the
controllers implement RPC server programs [10] with
selected equipment(s). Finally, the Matlab interface to
variable access services, file and program management
those equipments is built just by emb edding the above
services and system status services. To access those
mentioned software controls into MEX functions.
services the host computer (client) must implement RPC
That has been done for several type of R&A equipment
calling code through an ethernet or serial connection
[12][16]: a robotic manipulator, a force/torque sensor, a
(both using TCP/IP protocols). ABB also developed an
microcontroller board, a CCD camera, etc. The all
Application Specific Protocol (ASP) called RAP [10] to
collection of functions constitutes the Matlab toolbox
be used with these services. The RAP messaging protocol
MATROBCOM.
works in the same way as MMS specified for MAP networks
[11].
To
implement
the
PC-Robot
RAPID Aplication
communication code based as mentioned on RPC’s using
Error in 'motor_on' RPC call: Error Code: -1114
RAP, the facility developed by the Sun Microsystems Open Computing (ONC) Group named SUN RPC 4.0
ans = -1114. The returned error code means "Invalid System State", and is printed on ABB manuals.
ported to Windows NT 4.0 or later, has been used. User services may be implemented using the basic RPC
>> matabbs4 ('program_prep', line)
services, written using the Rapid programming language (available at the robot controller). A simple switch-case-
ans = 0 >> matabbs4 ('program_run', line)
do loop driven by a parameter remotely controlled would
ans = 0
do the job. The all list of functions available in the module is presented in Table I.
To check system state the command is, >> matabbs4 ('sysstate', line)'
The robot may be connected to the computer using a
ans =
serial port or preferably an ethernet port, both using
0
? Error code (0 = OK).
TCP/IP protocols. If a local area netwo rk is available,
2
? Controller State (Stand By).
several users/computers may be connected to the robot at
4
the same time (with a line or channel open), and then
1
? Operational State (Auto Mode).
MATABBS4 keeps track of actual open lines/channels.
4
Opening a line means starting a client connection to the
4
RPC servers running on the robot. In the following we
9
will demonstrate a few capabilities of the module
3
? Number of Programs Loaded (1). ? Program Controller State (Stopped State). ? Program State (Initiated). ? Space Available on System Memory (%).
MATABBS4. The user should check system state after any system To open a connection to the robot the command is,
change state command to confirm system change and to
>> line = matabbs4 ('open', 'babylon', 'reserved')
determine when to start commanding the system. For
line = 1
example, if a 'program_run' command is issued the user
where 'babylon' is the name of the robot as declared in the
should wait until the controller state is 'Run State = 4',
DNS table or system "hosts" file.
before starting using the features of the loaded robot program. Checking the system state can be performed in
Load and start a program,
cycle until a condition is met, or by monitoring the RPC
>> matabbs4 ('program_load', 'flp1:\example.prg', line)
messages from the robot.
ans = 0 Table I - Functions available in the MATABBS4 module [16].
>> matabbs4 ('motor_on', line) ans = 0
If the robot is not in "AUTO MODE" then, >> matabbs4 ('motor_on', line)
Function open close motor_on motor_off prog_stop
Brief Description Opens a communication line with a robot (RPC client) Closes a communicatio n line. Go to Run State Go to Standby State Stop running program
prog_run prog_load prog_del prog_set_mode prog_get_mode prog_prep pgmstate ctlstate oprstate sysstate ctlvers ctlid robpos read_xxxx
read_xdata write_xxx
write_xdata digin digout anain anaout
Start loaded program Load named program Delete loaded program Set program mode Read actual program mode Prepare Program to Run (Program Counter to begin) Get Program Controller State Get Controller State Get Operational State Get System State Get Controller Version Get Controller ID Get current robot position Read variable of type xxxx (there are calls for each type of variable defined in RAPID [9]) Read user defined variables Write variable of type xxxx (there are calls for each type of variable defined in RAPID [9]) Write user defined variables Read digital input Set digital output Read analog input Set analog output
9.0000e+009
? Position of External Axis 1
9.0000e+009
? Position of External Axis 2
9.0000e+009
? Position of External Axis 3
9.0000e+009
? Position of External Axis 4
9.0000e+009
? Position of External Axis 5
9.0000e+009
? Position of External Axis 6
Note: 9.0000e+009 means that the external axis is not currently in use.
Reading and acting on IO, >> matabbs4 ('digin', 5, line) ? digital input 5. ans = 1
output 7. ans = 0 >> matabbs4 ('anain', 2, line) ? analog input 2.
>> matabbs4 ('robpos', line)'
ans = 3453
0
? Error code.
Signal is ON
>> matabbs4 ('digout', 7, 1, line) ? to activate the digital
To read current robot position the command is,
ans =
to read the value of
to read the value of
>> matabbs4 ('anaout', 1, 236, line) ? to write the value 236 on analog output 1.
4.6833e+002
? Cartesian X position.
2.0689e+002
? Cartesian Y position.
1.2061e+003
? Cartesian Z position.
5.2125e -002
? Quaternion (q 1 ).
-2.3500e-001
? Quaternion (q 2 ).
4.3565e -001
? Quaternion (q 3 ).
-8.6733e-001
? Quaternion (q 4 ).
0
? Configuration data (ABB CF1).
>> matabbs4 ('read_bool', 'name', line) ?
0
? Configuration data (ABB CF4).
state of a 'bool' variable.
1.0000e+000
? Configuration data (ABB CF6).
ans = 1
0
? Configuration data (ABB CFx).
ans = 0
Acting on program variables defined in RAPID (see Table I) or user defined variables (XDATA type), >> matabbs4 ('write_num', 'name', value, line) ? writing on a type 'num' variable. ans = 0 reading the
Variable is TRUE.
Suppose that we have a robot program (written in RAPID
>> matabbs4 ('write_num', 'decision', 1, line)
[9], a robot programming language from ABB Robotics)
ans = 0
running, which is switched by a variable named, let say, 'decision'. The basic structure of the program would be
checking between each vector if the last comma nd was
something like (using a C-type definition),
already performed, i.e., when the next call outputs -1,
while never_end; switch decision
>> matabbs4 ('read_num', 'decision', line) The resulting motion would not be continuous but a
case 1: call routine_1; break;
sequence of "steps". A continuous motion can be easily
case 2: call routine_2; break;
achieved by redesigning routine_1 to accept a matrix of
…
'robtargets' and defining zones sufficiently large to avoid
case n: call routine_n; break;
stops between each point of the trajectory. We
end_switch; end_while;
implemented a 'play_trj' service as described to accept trajectories with up to 500 points.
Suppose again that routine_1 moves the robot from actual
Note: With the new versions of RAPID there is also the
position to another one defined by a position variable
possibility to command joint vectors directly using the
named 'new_pos' of the type robtarget. Routine_1 should
new 'jointtarget' structures. With the new versions, with a
then be something like,
slight modification in routine_1 we can start commanding
PROC routine_1 MoveJ to new_pos;
joint vectors directly (the write jointtarget calls were also implemented in MATABBS4).
decision = -1; ENDPROC
Figure 2 shows a two-finger gripper attached to the robot
From within Matlab we can then use the MATABBS4
through a tool changer (from ATI Inc., USA). A
module to command new positions to the robot. Those
force/torque sensor is also included (from JR3 Inc., USA),
positions could be defined as a set of joint vectors
although it is not used in this example. The gripper is
specifying the joint angles to be achieved. We should then
based on a pneumatic module (from Zaytran Inc., USA),
run a forward kinematics function to obtain the positions
having an air pressure regulator to control the grasp force.
in cartesian coordinates, with orientation in quaternions
Currently there is no force feedback, so we use an open-
and using the ABB configuration definition. For that we
loop control approach based on the mapping between the
can use any forward kinematics function from one of the
analog input to the air pressure regulator and the force
available robotics toolboxes [2][3][4] and then convert the
between the fingers. That mapping was obtained by
4x4 transformation matrices into 'robtarget' structures. In
taking a few measures of commanded pressure (digital
[4] there is a function that does it all, outputting a matrix
value to the ADC) and the obtained grasp force, using a
with one 'robtarget' per matrix line. If we name that
F/T sensor inserted between the two fingers. The open
matrix 'pos' we could then command it to the robot with
loop transfer function was then obtained using the Matlab
the commands,
function 'polyfit'. This means that before commanding the
>> matabbs4 ('write_robtarget', 'new_pos', pos[1,:], line)
gripper to close, we need to select the required analog
ans = 0
value (actually the digital value to the ADC of the analog
Move to final position and place object,
board) appropriate to the desired grasp force,
>> matabbs4 (‘write_robtarget’, ’new_pos’, pos_3, line) >> matabbs4 (‘write_num’, decision’, 1, line) ? MOVE pos_3 >>matabbs4 (‘digout’, 1, 0, line) ? PLACE object Move away, >> matabbs4 (‘write_robtarget, ’new_pos’, pos_2, line) >> matabbs4 (‘write_num’, decision’, 1, line) ? MOVE pos_2. This is a very simple example where we didn't care about selecting the velocity, the position accuracy, the acceleration, etc. All that can be also parameterized
Fig. 2 – Two finger pneumatic gripper.
remotely before commanding any motion. For example, if we write routine_1 in the form,
>>ana_value = pressure_force_map (required_force) ana_value = digital value to command to the ADC
PROC routine_1 SetAcc n_acc;
A simple pick-and-place operation would be:
MoveJ to n_pos, with n_vel & new_prec;
Open Gripper and approach object,
SetAcc default_acc;
>> matabbs4 ('digout', 1, 0, line)
? OPEN Gripper
Move to grasp position and pick object,
decision = -1; ENDPROC
>>matabbs4 (‘digout’, 1, 0, line) ? OPEN Gripper >> matabbs4 (‘write_robtarget’, ’new_pos’, pos_1, line)
where, 'n_acc', 'n_vel' and 'n_prec' are parameters that we
>>matabbs4 (‘write_num’, ’decision’, 1, line)
can change remotely and have predefined default values.
? MOVE pos_1
In this case, the motion to point 3 above, for example,
To select the grasp force,
should be commanded as follows,
>> ana_value = pressure_force_map (5)
>> matabbs4 ('write_num', 'n_acc', n_acc, line)
>> matabbs4 (‘anaout’, 1, ana_value, line)
>> matabbs4 ('write_speeddata', 'n_velc', n_speed, line)
>> matabbs4 (‘digout’, 1, 1, line)
>> matabbs4 ('write_zonedata', 'n_prec', n_precision, line) ? PICK object
? SET Values
Aproach final position (suppose that from pos_1 to pos_2
>> matabbs4 ('write_robtarget', 'n_pos', pos_3, line)
there are no obstacles),
>> matabbs4 ('write_num', 'decision', 1, line)
>> matabbs4 (‘write_robtarget’, ’new_pos’, pos_2, line) >> matabbs4 (‘write_num’, decision’, 1, line) ? MOVE pos_2
? MOVE pos_3 This pick and place operation was used for playing chess were the robot moves the pieces. The application will be presented in the conference, and uses different grasp forces for each type of chess piece. User plays chess with
the mouse, the robot moves the pieces and confirms
[3] Corke PI., "A Robotics Toolbox for Matlab", IEEE
moving operations (which updates user screen), and the
Robotics and Automation Magazine, 1996;3(1):24-
CCD camera enables final visual verification of players
32.
moves.
[4] Pires JN. and Sá da Costa JMG., "Ferramentas de
4. Timing
Software para Controlar, Programar e Monitorizar
All calls to the robot require between 10 and 15 ms
um
depending on the data structure to write or read, if an
Computadores
ethernet connection is used. If a serial connection is used
Mechanical
(19200 bps) the access time goes up to around 200 ms.
1998;2(1):43-67.
Robô
Manipulador
Industrial
Pessoais",
Engineering
usando
Ibero-American
Association
Magazine,
All calls are made with confirmation, i.e., a code is sent
[5] Box D., "Essential COM", Addison-Wesley, 1998
back informing about call success or cause of failure.
[6] Camplone M. and Walrath K., “The JAVA TM
5. Conclusion. In this short paper we demonstrated one technique to interface R&A equipment with personal computers. The paper focuses on using the Matlab environment to interface the selected equipment. The solution is based on a distributed software architecture that may be used to include support to other type of equipment. In fact other modules were built with it, not presented in the paper, to handle force/torque sensors, CCD cameras, PLCs and microcontrollers. With this type of interface even non-
Tutorial”, 2nd Edition, Addison-Wesley, 1998. [7] Matlab API Reference, The MathWorks Inc., USA, http://www.mathworks.com. [8] Bloomer
J.,
"Power
Programming
with
RPC",
O'Reilly & Associates, Inc., 1992. [9] ABB
IRB1400
Users
Manual,
ABB
Flexible
Automation, 1997. [10] RAP, Service Protocol Definition, ABB Flexible Automation, 1996. [11] Halsall
F.,
"Data
Communications,
Computer
trained users can easily use actual R&A equipment, since
Networks and Open Systems", Third Edition,
Matlab is a fairly simple environment to use. This is
Addison-Wesley, 1992.
particularly true with students, as our personal experience
[12] Pires JN, Sá da Costa JMG, “Object Oriented and
clearly show. The ideas presented here were then applied
Distributed Approach for Programming Robotic
to an industrial robot and demonstrated with an example
Manufacturing Cells”, IFAC Journal on Robotics and
were the robot moves the pieces of a chess game, played
Computer Integrated Manufacturing, February 2000.
by two users on different computers . More info about this
[13] Pires
JN,
“Controlo
de
Força
em
Robôs
work including videos may be found in the URL:
Manipuladores Industriais”, Ph.D. Thesis, University
http://www.dem.uc.pt/norberto/seminarios/
of Coimbra, June, 1999. [14] Factory
References: [1] Matlab Users Guide, The MathWorks Inc., USA, http://www.mathworks.com. [2] Gourdeau R., "Object Oriented Programming for
Suite
2000,
Wonderware
Inc,
USA,
http://www.wonderware.com [15] ABB
DeskWare,
ABB
Flexible
Automation,
http://www.abb.se. [16] Pires JN, “Using matlab to interface robotic and
Robotic Manipulator Simulation", IEEE Robotics and
automation
equipment”,
IEEE
Robotics
Automation Magazine, 1997;4(3):21-29.
Automation Magazine, September 2000.
And