IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 21, NO. 2, MARCH 2013
521
Rate Assignment in Wireless Networks: Stability Analysis and Controller Design Kian Jalaleddini, Kaveh Moezzi, Amir G. Aghdam, Mehdi Alasti, and Vahid Tarokh Abstract—In this brief, data-rate assignment in IS-856 uplink (reverse link) is studied. The problem is first formulated using an interference model, and then a dynamic control strategy is developed for efficient rate assignment. In the first step, the controller is designed for the special case when the number of users in the network is fixed. Then, the designed controller is further developed for a dynamic network (where the number of users is subject to change) to achieve the desired performance. To this end, the network is formulated in the framework of switched systems, where any new activation or deactivation of users is considered as switching from one system to another. The controllers obtained are then modified properly to retain network stability and performance in the presence of time-delay. Simulation results are presented to elucidate the effectiveness of the proposed approach. Index Terms—Adaptive control, communication network control, delay systems.
I. INTRODUCTION
C
DMA2000 1xEVDO or IS-856 is an enhanced third generation (3G) wireless network. The system is designed to cope with the growing demand for high-speed wireless service at low cost [1], [2], [5], [14]. The highest data rate for IS-856 is 2.46 Mbps on downlink and 153.6 kbps on uplink (the highest rates of EVDO Revision A are 3.1 and 1.8 Mbps on downlink and uplink, respectively). These distinct ranges of transmission rate are suitable for the majority of asymmetric network applications, where disjoint bandwidths are required for transmitting and receiving data (with a higher rate assigned to the downlink channel). However, the new multimedia applications such as interactive wireless gaming, video telephony (VT), camera phones, etc. are symmetric. Therefore, it is essential to use the resources in IS-856 uplink more efficiently [1], [2], [5], [6], [8]. Interference in IS-856 uplink is an important problem which is caused by the spectral overlap, and needs to be taken into consideration in performance analysis. Practically, in CDMA systems any user that transmits data to the base station is, in fact, Manuscript received September 02, 2010; revised May 11, 2011; accepted September 23, 2011. Manuscript received in final form December 24, 2011. Date of publication February 07, 2012; date of current version February 14, 2013. Recommended by Associate Editor M. Mesbahi. This work was supported by the Natural Sciences and Engineering Research Council of Canada (NSERC) under Grant RGPIN-262127-07. K. Jalaleddini is with the Department of Biomedical Engineering, McGill University, Montréal, QC H3A 2B4, Canada (e-mail: seyed.jalaleddini@mail. mcgill.ca). K. Moezzi is with Aviya Technologies, Ville Saint Laurent, QC H4R 2N9, Canada (e-mail:
[email protected]). A. G. Aghdam is with the Department of Electrical and Computer Engineering, Concordia University, Montréal, QC H3G 2W1, Canada (e-mail:
[email protected]). M. Alasti is with Lightsquared Inc., Reston, VA 20191 USA (e-mail:
[email protected]). V. Tarokh is with the Division of Engineering and Applied Sciences, Harvard University, Cambridge, MA 02138 USA (e-mail:
[email protected]). Digital Object Identifier 10.1109/TCST.2011.2181975
a source of interference. This issue is of great importance because in such networks users transmit data at the same time over a prescribed spectrum in a common medium [3], [4]. A reference value for the interference magnitude can be defined based on the ideal expectations. There will be performance implications if the interference increases above this reference level [4]. On the other hand, if the interference level decreases below this level, the problem of under-utilization of the network resources is encountered. The effect of interference in this type of network is often compensated by applying a proper control strategy. To this end, a signal is transmitted from the base station to the users to report the status of the network in terms of interference level. In other words, the base station broadcasts a common signal to all users based on its measurement of network interference, and users adjust their rates accordingly. This is a single-bit signal which is called the reverse activity bit (RAB). Note that it is normally desirable to assign as many bits as possible for data, and as few bits as possible for reporting network status. A simple state transition mechanism is implemented in IS-856 Revision 0 standard to properly adjust user rates [2], [1], [13]. In the corresponding algorithm, each user sets its transmission rate locally by monitoring a common single-bit and acting upon it, accordingly. Due to its performance deficiency, this process is replaced by a token bucket scheme in EVDO Revision A [5], [2]. A number of papers have used these rate control mechanisms and have performed rate assignment among the access terminals (ATs) to achieve fairness and to maximize a performance metric. In [5]–[7], the rate assignment is formulated as a utility maximization problem using a framework analogous to the one presented in [11], [12], [19], [20], and the fairness and stability issues are studied. The mechanism proposed in [5], [6] uses the rate control of IS-856 (EVDO Revision 0); the desired rate assignment is subsequently derived in order to maximize the utility function and offer fairness. On the other hand, [7] uses the rate control of EVDO Revision A to address the utility maximization and fairness problems. The rate allocation problem in the above-mentioned papers is studied in the context of auctioning algorithms subject to existing constraints in the physical system in order to fairly allocate the available resources to all users. In particular, a resource allocation algorithm is proposed in [6], and its long-term and short-term fairness is verified with respect to the interference power constraint. In [8], a distributed framework is introduced to tackle the underlying problem using a control theoretic view. Transmission of the RAB from the base station to the users is incorporated in the forward path of the closed-loop model, and a simple compensator is designed for the network to achieve output regulation. A dynamic control strategy is introduced in [16] which outperforms the simple controller of [8]. However, the signaling between the base station and users in [16] is not minimal. Furthermore, the effect of delay in the control loop is not taken into account in the stability analysis of [16]. These
1063-6536/$26.00 © 2012 IEEE
522
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 21, NO. 2, MARCH 2013
shortcomings are addressed to some extent in [18], by using a more accurate model for the network. In this brief, an adaptive rate control strategy is developed for IS-856 and stability analysis is performed using the Lyapunov technique. Since the number of active users in the network varies by time, the new activation and deactivation of users in the network is formulated in the framework of switched systems [9]. Some conditions on the controller parameters and the speed of new activations/deactivations in the network are derived to guarantee the stability and boundedness of the system state. Furthermore, upper bounds are obtained for the rate regulation error of the network. A proper fairness strategy is also provided to better (and more efficiently) meet customers’ demand. The plan of this brief is as follows. In Section II, IS-856 uplink is modeled, and the control structure is introduced. The new rate control strategy is presented in detail in Section III. The stability of the system is also studied in this section and an upper bound on the output error is derived. Simulations are provided in Section IV to demonstrate the efficacy of the results. Finally, concluding remarks are summarized in Section V.
Fig. 1. Nonuniform quantizer as a practical counterpart of the mapping (solid dots indicate the corresponding feasible set in ).
where is the out-sector interference originated from the ATs that are not in soft hand-off with the base station. Furthermore, is the total in-sector interference which is given by
II. INTERFERENCE MODEL FOR IS-856 UPLINK Access terminals (AT) are the mobile components of a wireless communication network that provide data to users. The access network (AN), on the other hand, is the fixed element of the network (mainly base station) which provides data to ATs. A CDMA channel along with the corresponding covered area is called a sector [2], [5]. Let the number of ATs available in a sector of an IS-856 network be denoted by , and assume that all of these ATs are full-buffered. Assume also that the base station receives the same pilot power from all ATs [5], [6], [8]; this strategy is often called perfect power control and has been studied in a number of papers (e.g., see [15]). ATs transmit data with a rate , where is the set of all feasible rates (as a known standard set) [13]. Let (traffic to pilot ratio) denote the ratio of the total data power to the pilot power for the th AT; this ratio also belongs to a given feasible set . Define a one-to-one mapping from the feasible rate set to the feasible set as shown by solid dots in Fig. 1, and denote it as [2]
is the received pilot power from each AT at the where AN, in the case of perfect power control, i.e., . On the one hand, the existence of strong interference in the network results in high ROT, which has performance implications. On the other hand, weak interference in the network leads to low ROT, which can be interpreted as under-utilization of the network resources. Therefore, it is desired to keep the ROT close to a prescribed threshold denoted by . By substituting in (4) with (1) and assuming (for simplicity) that the out-sector interference in (3) is negligible compared to for all , one can conclude that the term (which is a measure of the feedback signal from ATs to the AN) should be regulated to a reference value given by
(1)
(5)
The total traffic power of the th AT is then given by
(4)
The feedback signal received by the AN is compared to the reference given above, and the error signal (2)
where denotes the pilot power of the th AT. Let represent the total background thermal noise, which is assumed to be Gaussian. The raise over thermal (ROT) in the base station at any time instant is defined as [5], [14] (3)
(6) is produced. This error signal then passes through a two-level comparator, generating a signal called the reverse activity bit (RAB) [2]. This process can be formulated as (7)
JALALEDDINI et al.: RATE ASSIGNMENT IN WIRELESS NETWORKS
523
the state vector , as shown in the sequel. Define the new state vector as follows: (11) where
Fig. 2. Rate-control loop in IS-856 uplink with
is defined by (12)
active users.
This means that if the total power of all ATs is less than the desired value, then ; otherwise, . The objective is to design a set of controllers to regulate the rate of ATs such that reaches the desired level in a reasonably short period of time. The closed-loop network configuration is shown in Fig. 2 as a feedback control system. Remark 1: Note that the output of the controller can take any real value. However, according to the mapping shown in Fig. 1, the domain of this mapping (i.e., the set of allowable values of its input) is limited to the finite set . In order to overcome this problem, a new mapping is introduced whose domain is all positive real values between 0 and 500 kbps. This mapping is obtained by considering a piecewise constant , where each discontinuity is centered at a point between two feasible rates in the set . The mapping is also shown in Fig. 1, and is, in fact, a nonuniform quantizer.
The nonlinear closed-loop model (8) can now be expressed in the new coordinates as (13) where
and
are given by (14)
(15)
Since is not a continuous signal and takes the values or , function expressed by (13) can be modeled as a switched system as follows:
III. MAIN RESULTS
(16)
A. Controller Design for a Fixed Number of Users
where
Assume that (the number of ATs in the network) is constant. To distinguish between this case and the general case of varying number of users, here this fixed number is denoted by . Now, the objective is to design a set of controllers for ATs (as shown in Fig. 2) to regulate the output using the RAB signal . Consider a controller with the state vector for the th AT, . Let the controller structure be (8) where
and
are expressed as
(9)
(10)
(17) The vectors
and
are defined as (18)
It can be shown that the origin is the equilibrium point for both subsystems in (16). Since the sign change of is not known a priori, (16) is considered as a switched system with an arbitrary switching signal . Remark 2: It is to be noted that (16) is a state-dependent switched system. This means that the switching signal in (17) is a function of the state, and hence an implicit function of time. Theorem 1: The state trajectories of the switched system (16) are globally exponentially stable in the sense of Lyapunov. Proof: Define (19)
and is defined in (7). Furthermore, the coefficient in (9) is strictly positive. It is to be noted that the actual rates of each AT will later be calculated based on this model. Note also that the stability of the network depends directly on
To carry out the stability analysis, choose the Lyapunov function candidate as (20)
524
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 21, NO. 2, MARCH 2013
First, it is assumed that and the stability analysis is performed for the first subsystem. The derivative of the Lyapunov function (20) along the state trajectory of the system (16) with is
or at the feasible rate
, with the probability
given below (26)
is a th order approximation of the where the function mapping from the feasible rates to feasible . Remark 4: The total in-sector interference (4) is calculated for the case of perfect power control, i.e., . However, perfect power control is not achieved in practice. A more realistic model can be obtained by considering the deviation of pilot power from the desired value. This is carried out by incorporating the pilot power regulation error as follows: (27)
(21)
where the relative deviation of the pilot power is bounded by a fixed value , i.e.,
This can be further simplified as
(28) The total error signal generated at the AN is (22) It can be concluded from (22) that (23) which guarantees the exponential stability of the first subsystem (note that is strictly positive) [17]. A similar result is obtained for the second subsystem by using the same Lyapunov function as the previous case. The exponential stability of the switched system (16) follows from the fact that both subsystems have the same equilibrium point and a common Lyapunov function. Remark 3: The stability of system (8) follows directly from that of system (16), and hence the state of system (8) converges exponentially to . In order to achieve exact tracking, the trajectory of , should be such that , for all . Therefore, should be defined in such a way that . Similarly to (6), define the tracking error as
(29) [note that the RAB is calculated based on (29)]. The error bound can then be obtained as
(30) Now, using Theorem 1 it can be concluded that the system is stable and the error in (29) converges to zero. Considering (30), this means that the steady-state output error is bounded as follows: (31) Note that in the case of perfect power control, converges to .
(24)
B. Controller Design for an Unknown Fixed Number of Users in the Presence of Time-Delay
Since is a finite set consisting of only feasible ratios, it is not always possible to find a value for in the set , for which is exactly equal to . In order to overcome this hurdle, the probabilistic dynamic rate selection method of [6] is adopted here. If the output of the controller of the th AT is between the two feasible rates and (i.e., ), then this AT transmits data at the rate , with the probability given by
It is desired now to extend the results obtained in the previous subsection to the case of an unknown number of users. This means that the equilibrium point should be replaced by a nominal state which reflects the effect of network load produced by all ATs. Hence, this nominal trajectory should be defined based only on the common single-bit signal (7) received from the AN. This can be achieved by considering the equilibrium trajectory as a proper function of , say , which corresponds to the perfect regulation of ROT. It is also desired to investigate the impact of processing delay on stability, and take it into account in the controller design. Let
(25)
JALALEDDINI et al.: RATE ASSIGNMENT IN WIRELESS NETWORKS
525
the time-delay in the forward path be denoted by . In other words, the AN transmits the signal to ATs, but they receive it at . In terms of control operation, the input to the system in this case is . The state-space representation of the system for the th AT with the state vector in the presence of time-delay is (32) where
and
Like the previous subsection, (38) can be modeled in the framework of switched systems. To this end, suppose that the switching happens at , where . Then the resultant system can be described by (41) Similar to (18), define the family of matrices as
are given by (42)
(33) where
and
and
is given by
(34)
(43) The above equation can be written as follows:
Note that in system (32), the equilibrium trajectory is
(44) (35)
It is required that be regulated to a “small” neighbor. Howhood of the ideal nominal trajectory ever, the controller cannot perform this in practice because the signal is not available to ATs. Instead, the controller can generate the signal from . Define the new state vector as follows: (36) where
(37)
where
is a constant coefficient for subsystem , which is defined as
(45) is a right continuous funcIt can be deduced from (44) that tion with a continuous derivative. Also, one can conclude from (43) that is bounded too; more precisely, . The following theorem provides a sufficient condition for the stability of system (41). Theorem 2: Let the coefficient in (9) be greater than . Then the state trajectories of system (41) are globally exponentially convergent to the ball , where is given by
The system (32) under the transformation (36) becomes
(46) (38)
where
and
similar to (19), and choose the same Proof: Define Lyapunov function as (20). Differentiating (20) along the state trajectory of system (41) for yields
are expressed as
(39)
(47) Note that (40) for all
.
526
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 21, NO. 2, MARCH 2013
Therefore, the derivative of the Lyapunov function in (47) can be written as follows:
It can be shown that (53) Therefore, from (52) and (53) it is inferred that
Remark 5: According to Corollary 1, the upper bound on the discrepancy between the nominal rate and the actual rate for each AT in steady state is equal to . C. Stability Analysis for Varying Number of Users
(48) Since , hence (48) holds for all . Thus, it results from Lyapunov’s theorem that the system is exponentially convergent to the ball , where is given by (46) [10]. This completes the proof. The following corollary provides an upper bound for each state variable and also for the overall performance of the system. Corollary 1: The maximum bound on in steady state is given by (49) In addition, the bound on the absolute sum of error magnitudes in steady state is
Assume now that , the number of active ATs in the network, is subject to change. Assume also that this number changes at , where . This implies that the number of active ATs at and are different. To maintain the output balance, the th AT adjusts the parameter continuously according to the number of active ATs available in the sector, and the reference signal . To model changes in the number of users, (41) will now be reformulated as an impulsive switched system [10], in such a way that any new activation or deactivation is modeled as a jump from one subsystem to another. One can write (54) is right-continuous). Here (note that the state vector represents the jump in as a function of and . For example, when a new activation or deactivation occurs in the th AT, the function is expressed as (55)
(50) Proof: The system (41) is stable if the derivative of the Lyapunov function given by (48) is negative. To find the region of attraction, one can find the trajectories , and for which the following condition holds: (51) In this region of attraction, the maximum error magnitude for the th AT results when , for all , and , for all , i.e., . To find an upper bound on the overall performance , set , for all . Then, using (48) and (51) one arrives at the following relation: (52)
In the above representation, for the case of activation, and is set by the AN. For the case of deactivation, on the other hand, is equal to zero and is the last value obtained from (35), immediately before deactivation. The objective now is to find a time interval for ATs, within which the network output is guaranteed to settle in a reasonably close neighborhood of the equilibrium trajectory, when a certain number of switchings (instants of activation/deactivation of users) occur. Now, it is desired that the Lyapunov function becomes smaller than a given strictly positive scalar after an arbitrary number of switchings, denoted by , and remains less than that as time increases. This provides a measure of network performance, as the maximum error in the system output is directly dependent on the value of . Theorem 3: Denote the maximum value of with , and suppose that . Let also a strictly positive value and a natural number be given. Then, the time it takes for the Lyapunov function to reduce to after the th change in
JALALEDDINI et al.: RATE ASSIGNMENT IN WIRELESS NETWORKS
527
the number of activation/deactivation, does not exceed a finite value given below
(56) where
is defined as (57)
is the maximum value of over time. Proof: The derivative of the Lyapunov function satisfies the relation (48). If the initial value of the Lyapunov function is greater than the desired upper bound , then the maximum jump in the Lyapunov function (20) at the first switching instant satisfies the following relation:
D. Equilibrium Trajectory Adjustment: Long-Term Fairness Strategy Consider a long-term fairness strategy, under which the subscription fee varies by the assigned rate. In other words, the users can receive a higher data rate within the allowable range if they choose to pay a higher access fee. To formulate fairness in rate assignment, an appropriately weighted function of the RAB [instead of a simple integral associated with (35) and (37)] is used in the regulation problem. For example, one can use different weighting and bias coefficients for different customers, and introduce the new functions and as follows:
and
(58) By repeating this for
switching instants, one arrives at (59)
Let the time it takes for the Lyapunov function to decay down to following the th switching instant be denoted by . It can be concluded from (48) that (60) . This completes the and subsequently (60) holds for proof. Remark 6: Theorem 2 implies that the system exponentially converges to a neighborhood of the desired rates in the presence of time-delay, in the case when the information about the number of active ATs is not available to every AT. Theorem 3, on the other hand, states that if there is a minimum time between the consecutive activations/deactivations of the ATs in the network, then the users’ rates can be adjusted to a proper neighborhood of the desired values. The size of this neighborhood depends on the parameter of the controller. Remark 7: Without loss of generality, assume that the initial condition of all state variables of the system is zero. It follows immediately from Theorem 3 [by substituting in (56)] that if no new activation or deactivation occurs in the network for a time interval given by
(62) (63) where and are positive constants with known upper bounds described by and , for all (the constants and depend on the number of users and the allowable deviation between different users’ assigned rates). The minimum guaranteed rate for each AT can be set by the bias coefficient . The weighting coefficient can then be adjusted in accordance with the subscription contract of the corresponding user. It can be shown that defined in (43) is bounded by . The (36) is then rewritten using (62) and (63). For the case of fixed number of ATs, using an approach similar to the one in Theorem 2 and employing the same Lyapunov function as in (20), it can be concluded that the system is globally exponentially convergent to the ball if , where is given by (64) Furthermore, the maximum bound on the magnitude of in steady state is (65) The above results are derived for the case of fixed number of users. In order to find stability conditions for the network in the case when the number of users is subject to change, one can take an approach similar to the one in Theorem 3. It follows that the maximum time it takes for the Lyapunov function to reduce to after the th change in the number of activations/ deactivations does not exceed a finite value given below
(61)
then the Lyapunov function decays down to the prescribed value , and stays smaller than that as time increases (this is only a sufficient condition for the desirable decrease in the size of the Lyapunov function, which is closely related to the output performance).
(66) where
is defined as (67)
and
is the maximum value of
.
528
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 21, NO. 2, MARCH 2013
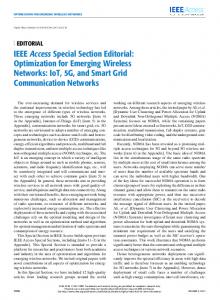
Fig. 4. Output resulted from using dynamic probability rate allocation method for (a) an AT with the fairness parameters given by (68) and (b) an AT with the fairness parameters given by (69).
Fig. 3. Network output resulted from using dynamic probability rate allo, and (b) . (c) The number of available cation method with (a) ATs considered in the simulations at different times.
Remark 8: The results obtained show that choosing a large value for the control parameter would be advantageous in terms of the minimum required time for consecutive activations/deactivations [as can be seen from (56), (61), and (66)], and also in terms of convergence time [as can be seen from (23) and (48)]. However, a large can have implications in terms of the implementation of the system in practice. A large would increase the control bandwidth, which in turn increases its sensitivity to noise. This introduces a tradeoff in the choice of the coefficient in the control law.
moving average (dashed curve) for . In Fig. 3(b), analogous results are shown for . The number of active users in the network is drawn versus time in Fig. 3(c) (this figure is used in all simulations). Note that the smallest time interval between two consecutive changes in the number of users in this example is 5 s, which is greater than 500 ms introduced in Remark 7. Thus, it is guaranteed that the desired performance (in terms of the final magnitude of the Lyapunov function) will be achieved. Note that since the limit on the corresponding time interval is only a sufficient condition, the network may still perform desirably for a more frequent change of active users. A simulation scenario is also considered, in which the parameters of two of the ATs are set to (68) while the fairness parameters of all other ATs are (69)
IV. SIMULATION RESULTS In this section, a simulation scenario is considered where multiple ATs are available in a single cell. The reference is set to 171.23, which corresponds to the system capacity of 600 kbps [1]. The simulation is repeated for two different values of to demonstrate the effect of this parameter on the system response. Let the initial number of users in the cell be . Since the number of users changes at different points in time due to the new activations/deactivations, hence active ATs adjust their control parameters continuously. In the simulations provided in this section is set to 1, which results in 500 ms for and 50 ms for (these are realistic values in practice). Furthermore, the delay in the network structure is assumed to be constant and equal to 13.36 ms, which is equivalent to 8 time slots [1]. In addition, let the instants (in seconds) at which the number of active users changes be 10, 15, 20, 25, 40, 50, 65, 80, 85, 90, 95, 100. It is to be noted that in all simulations the exact mapping is used to find the network output. Assume that the number of users is unknown to ATs, and let the probabilistic rate selection method be used. Fig. 3(a) depicts the network output along with its
. Let the output of the th AT be denoted by . In this case, the output of an always-active AT, say the first one, is depicted in Fig. 4(a), while the output of the third AT is depicted in Fig. 4(b). The number of active users in the network at different times is the same as Fig. 3(c). From this figure, one can compare the effect of network load as well as the activation and deactivation of users on the output. The first and second ATs which have large ’s and small ’s associated with the fairness function have higher transmission rates compared to other users. Moreover, the sensitivity of these two users to the network load is less than that of the other users, as it can be seen at the instants of change of the number of active users. for
V. CONCLUSION A new control theoretic approach to rate assignment in IS-856 uplink is proposed. The problem is formulated first, and a control scheme is subsequently developed for efficient rate assignment in this type of system. The proposed control law is, in fact, nonlinear and time-varying. Furthermore, since in a practical environment the number of users is subject to change at distinct
JALALEDDINI et al.: RATE ASSIGNMENT IN WIRELESS NETWORKS
time instants, the underlying problem is presented in the framework of switched systems, and sufficient conditions for the stability of the system under the proposed controller are derived. A novel technique is also introduced to find an upper bound on the magnitude of the error in the network in the presence of processing delay. A proper fairness strategy is finally provided for the priority assignment of customers. Simulation results show the effectiveness of the proposed control scheme in the desired rate assignment of IS-856 uplink.
REFERENCES [1] 1xEV: 1xEVolution IS-856 TIA/EIA Standard, Revision 7.2. airlink overview, Nov. 2001 [Online]. Available: http://www.cdg.org [2] 3GPP2, Arlington, VA, “CDMA2000 high rate packet data air interface specification,” Version 2.0, Oct. 2000 [Online]. Available: http://www. 3gpp2.org [3] A. J. Viterbi, CDMA: Principles of Spread Spectrum Communication. Boston, MA: Addison-Wesley, 1995. [4] K. Il Kim, Handbook of CDMA System Design, Engineering and Optimization. Englewood Cliffs, NJ: Prentice-Hall, 2000. [5] P. Tinnakornsrisuphap and C. Lott, “On the fairness and stability of the reverse-link MAC layer in CDMA2000 1xEV-DO,” in Proc. IEEE Int. Conf. Commun., 2004, pp. 144–148. [6] R. Yim, O.-S. Shin, and V. Tarokh, “Reverse-link rate control algorithms with fairness guarantees for CDMA systems,” IEEE Trans. Wirel. Commun., vol. 6, no. 4, pp. 1386–1397, Apr. 2007. [7] J. Price and T. Javidi, “Decentralized rate assignments in a multi-sector CDMA network,” IEEE Trans. Wirel. Commun., vol. 5, no. 12, pp. 3537–3547, Dec. 2006.
529
[8] H. Alasti and A. G. Aghdam, “Rate control in CDMA2000 IS-856 up-link: A control theoretic view,” in Proc. Amer. Control Conf., 2006, pp. 4888–4893. [9] D. Liberzon, Switching in Systems and Control. Boston, MA: Birkhäuser Press, 2003. [10] J. P. Hespanha, D. Liberzon, and A. R. Teel, “On input-to-state stability of impulsive systems,” in Proc. 44th IEEE Conf. Decision Control, 2005, pp. 3992–3997. [11] F. Kelly, “Charging and rate control for elastic traffic,” Euro. Trans. Telecommun., vol. 8, no. 1, pp. 33–37, Jan.–Feb. 1997. [12] F. Kelly, A. Maulloo, and D. Tan, “Rate control in communication networks: Shadow prices, proportional fairness and stability,” J. Oper. Res. Soc., pp. 237–252, Mar. 1998. [13] S. Chakravarty, R. Pankaj, and E. Esteves, “An algorithm for reverse traffic channel rate control for cdma2000 high rate packet data systems,” in Proc. IEEE Global Telecommun. Conf., 2001, pp. 3733–3737. [14] R. Padovani, “The application of spread spectrum to PCS has become a reality: Reverse link performance of 1S-95 based cellular systems,” IEEE Personal Commun., no. 3, pp. 28–34, Sep. 1994, 3rd quarter. [15] R. Attar and E. Esteves, “A reverse link outer-loop power control algorithm for cdma2000 1xEV systems,” in Proc. IEEE Int. Conf. Commun., 2002, pp. 573–578. [16] K. Jalaleddini, K. Moezzi, A. G. Aghdam, M. Alasti, and V. Tarokh, “Controller design for rate assignment in wireless networks,” presented at the IEEE Int. Conf. Commun., Dresden, Germany, 2009. [17] H. K. Khalil, Nonlinear Systems. Englewood Cliffs, NJ: PrenticeHall, 2002. [18] K. Moezzi, K. Jalaleddini, A. G. Aghdam, M. Alasti, and V. Tarokh, “An adaptive rate assignment strategy for CDMA2000 IS-856 subject to RAB delay,” presented at the IEEE Global Commun. Conf., Honolulu, HI, 2009. [19] X. Lin, N. B. Shroff, and R. Srikant, “A tutorial on cross-layer optimization in wireless networks,” IEEE J. Sel. Areas in Commun., vol. 24, no. 8, pp. 1452–1463, Aug. 2006. [20] M. Chiang, S. H. Low, A. R. Calderbank, and J. C. Doyle, “Layering as optimization decomposition: A mathematical theory of network architectures,” Proc. IEEE, vol. 95, no. 1, pp. 255–312, Jan. 2007.