Connection Science Vol. 17, Nos. 1–2, March–June 2005, 5–21
Reflections on geometry and navigation KEN CHENG* Department of Psychology, Macquarie University, Sydney NSW 2109, Australia
The geometric arrangement of surfaces in an environment plays an important role in navigation in vertebrate animals. In this line of research, an animal is typically disoriented and then presented the task of relocating a previously encountered goal. Aside from the geometric shape of the enclosure, other non-geometric (featural) cues are typically available, including colours of walls, objects serving as landmarks, or smells. Animals use both geometric and featural cues, but mammals sometimes rely solely on geometric cues. This has led to views that the processing of geometric information is modular, being the work of a geometric module. Recent work has started to address just what geometric properties are encoded. These current issues are commented on in this paper, and a tentative picture is drawn that both global and local geometry, each in limited ways, are used for navigation. A view of modularity is also presented in which spatial information is stored together (in non-modular fashion), but some computational processes are modular and operate on limited kinds of information. Keywords: Geometry; Modularity; Navigation; Axes; Global; Local
1.
Introduction
To navigate in the world, an animal usually needs to figure out which direction is which, a problem also known as determining the heading (Gallistel 1990). In some cases of navigation, the heading needs to be continuously computed. Path integration is such a mechanism (reviews: Gallistel 1990, Biegler 2000, Newcombe and Huttenlocher 2000, Collett and Collett, 2002, Wehner and Srinivasan 2003, Etienne and Jeffery 2004). In path integration, an animal keeps track of the straight-line distance and direction to its starting point as it travels. If an animal is disoriented, reorientation is necessary. In outdoor environments, many animals, especially insects and birds, use a sun compass for establishing and re-establishing the heading (e.g. Wiltschko and Balda 1989, Wehner and Wehner 1990, Wehner 1994), although largescale landmarks may also be used (von Frisch and Lindauer 1954, Dyer and Gould 1983, Gagliardo et al. 1999). Vertebrates in indoor environments, however, typically use the surrounding landmark cues to reorient. Something about the shape of the environment may play a special role. As the extant literature has just been reviewed (Cheng and Newcombe 2005),
*Email:
[email protected]
Connection Science ISSN 0954-0091 print/ISSN 1360-0494 online © 2005 Taylor & Francis Group Ltd http://www.tandf.co.uk/journals DOI: 10.1080/09540090500138077
6
K. Cheng
only the briefest empirical summary will be presented here. Instead, the main purpose is to comment on current trends in the study of the role of environmental geometry in small-scale navigation. It was my early work with rats that launched the idea that vertebrate animals use the geometry of the surrounding environment to reorient (Cheng 1986). Since then, similar paradigms of research have been conducted on a range of species, including human children and adults, monkeys, birds and fish. Gallistel (1990) formulated a theoretical mechanism, discussed later, in which environmental geometry is extracted from computing the principal axes of a space. The idea of a geometric module forms a cornerstone of a recent proposal that human spatial representation is typically limited in nature: momentary, egocentric and limited in informational content (Wang and Spelke 2002, 2003).
2.
Summary of empirical literature
2.1 The rotational error: basic phenomenon In most of the studies, subjects were trained to find one target place within a rectangular enclosure. They had the task of relocating the target place after they had been disoriented. The task is one of relocation using the cues within the rectangular arena. The rectangular shape of the arena provides one source of cues, the geometric cues. Other non-geometric cues, called featural cues, are also available. These vary across studies and species, but they are cues such as colours of walls in the arena, panels with different characteristics at the corners, or discrete objects within the arena. In the original study (Cheng 1986), smells in the corners were also available as featural cues. It is important to clarify the difference between geometric and featural properties; the interest in the phenomenon of rotational errors depends on this. Gallistel (1990: 212) defined them clearly: A geometric property of a surface, line, or point is a property it possesses by virtue of its position relative to other surfaces, lines, and points within the same space. A nongeometric property is any property that cannot be described by relative position alone.
Thus, colours of walls are non-geometric (featural) properties. Even though patches of colours on a wall may have shapes, and shape is a geometric property, this property of the wall requires a non-geometric notion, that of colour, for its definition. The same can be said of smells or sounds emanating from a corner. The interesting error that led to the geometric/featural distinction is called the rotational error (figure 1). The rat was presented the task of relocating a place in the rectangular arena. The arena has both geometric cues (the overall rectangular shape) and featural cues (e.g. differences in wall colour and smells in the corners). In this artificial environment, defining a location with respect to the featural cues delivers one single unambiguous location as the target. Defining a location solely with respect to geometric cues, however, leads to an ambiguity in defining the target location. Both the correct location and the rotational error fit the definition. The rotational error is located at 180◦ rotation through the centre from the correct location. It is produced when the ‘map’ is matched to the world in the ‘wrong’ way, rotated 180◦ from what it should be (figure 1). Making the rotational error systematically, that is, above chance levels, indicates that the animal sometimes relies solely on geometric information for relocation; and if correct responses do not outnumber rotational errors statistically, then an animal is relying solely on geometric information in doing the task.
Geometry and navigation
7
Figure 1. Geometric and featural information using a hypothetical task. (A) Animals have the task of relocating an unmarked target. The arena has an overall shape, which constitutes the geometric information (B) as well as a wall of a different colour (the thicker wall) and a small object (lower left corner), which constitute the featural or non-geometric information (C). (B) Using only geometric information leads to an ambiguity. The animal has two ways of matching its record to the world. The correct way of matching (top wall of (B) matched to top wall of (A)) leads to a correct choice, while the wrong match (top wall of (B) matched to the bottom wall of (A), with the ‘map’ in (B) rotated 180◦ ) leads to the rotational error. (C) Using the featural information leads to an unambiguous match.
2.2
Rats
In Cheng’s (1986) experiments, rats made systematic rotational errors in both working memory and reference memory paradigms. In the working memory paradigm, the target location could be anywhere in the arena, and a different target location was shown to the rat on each trial. The task was to relocate the target location after being removed from the arena for 90 s. Multimodal featural cues (including olfactory, visual and tactile characteristics) were offered in panels in the corners. Statistically, the rats made as many rotational errors as correct choices. No other systematic errors were found. This pattern of results was also found by Margules and Gallistel (1988). In the reference memory paradigm of Cheng (1986), the possible locations to choose from were the corners, and the correct location remained the same from trial to trial. Rats chose the correct location far more than the rotational error, but still made systematic rotational errors. These results indicate that the featural cues were discriminable to the rats. It is worth emphasizing that in one set of experiments, one long wall was white while the other three walls were black, in addition to featural cues in the corners. Systematic rotational errors were found under these conditions in both working memory and reference memory paradigms. These results suggest some process of orientation that favours purely geometric properties over obvious polarizing visual cues.
2.3
Other vertebrate animals
In most of the research on ‘geometry’ following Cheng (1986), reference memory paradigms were used. An animal typically had the task of locating a target place, which was always at the same corner of a rectangular arena. Birds and fish do not make systematic rotational errors when provided with both featural and geometric cues (chicks: Vallortigara et al. 1990; pigeons: Kelly et al. 1998, Kelly and Spetch 2001, 2004b; fish Xenotoca eiseni: Sovrano et al. 2003; goldfish: Vargas et al. 2004). This shows that they are adept at using featural cues. Tests in a rectangular arena without featural cues, however, showed that they also use geometric cues. Each species then chose mostly the geometrically correct corners, either the correct location or the rotational error.
8
K. Cheng
When tested in a rectangular arena without featural cues, rhesus monkeys (Gouteux et al. 2001) and human children (Hermer and Spelke 1996) chose primarily geometrically correct corners. The monkeys failed to use small featural cues, but were above chance at using large featural cues. They continued, however, to make systematic rotational errors, even when given large featural cues. Children tested in a small space (1.2 m × 1.8 m) failed to use featural cues (Hermer and Spelke 1996, Learmonth et al. 2002), but when tested in a larger space (2.4 m × 3.6 m), they chose the correct corner more often than the rotational errors, indicating the use of featural cues (Learmonth et al. 2001, 2002). Children up to 3–4 years of age, however, still made systematic rotational errors in the larger space. 2.4
Immune from cue competition
Cheng and Newcombe (2005) reviewed many other topics concerning geometry. Only one is singled out here. Animals seem to learn geometric cues no matter what other cues are present. Geometric cues seem to be immune from cue competition. Thus, having a salient beacon at the target location does not prevent fish (Sovrano et al. 2003, Vargas et al. 2004), birds (Kelly et al. 1998, Tommasi and Vallortigara 2000), or rats (Pearce et al. 2001, Hayward et al. 2003, Wall et al. 2004) from learning where the target is with respect to the shape of the environment. This suggests an obligatory process in vertebrate animals that codes locations with respect to some characteristics of shape.
3. Theoretical considerations: I. What is encoded about geometry? In the rest of the paper, two major theoretical issues will be considered. First (in this section), what is encoded about geometry? Second (in the next section), is the use of geometric information modular? Gallistel (1990: chapter 6) has presented the only substantial theoretical analysis of how geometry is used in relocation. In the 1990 theory, shape parameters of principal axes were used to determine heading, or which direction is which in the world. Recently, Cheng and Gallistel (2005) have suggested that other kinds of axes, symmetry axes and medial axes, might be more appropriate candidates. Common to such schemes are two key characteristics, which will be expanded on in this paper. (1) The computation of such axes is based on shape. These are shape parameters. (2) Axes are far less than the entire shape. They are like summary statistics or abstracts. The point is to capture a lot of information with minimal ‘investment’ in information stored and computations required, reflecting a principle of parsimony for the brain. Such global matching strategies contrast with point-by-point or feature-by-feature matching, or local matching strategies. 3.1
Principal axes
For purposes here, we need consider only the two-dimensional case. The principal axes of a shape go through the centroid (centre of mass). The number of principal axes equals the number of dimensions in the space. The first or major principal axis goes roughly through the length of the space. Mechanically, it minimizes the angular momentum when the space is spun around it. Algebraically, principal axes are the eigenvectors. Statistically, the first principal axis is the first principal component. It is the line through the space for which perpendicular distances from points in the space to the axis are minimized, by the least-squares criterion. The second principal axis is perpendicular to the first principal axis; it maximizes the angular momentum
Geometry and navigation
9
if the space spins around it. Except for spaces with multiple axes of symmetry, the principal axes are unique. They can be determinately calculated, without resorting to iterative trial-anderror strategies, which are subject to computational explosions. In a rectangular arena, the principal axes are the two axes of symmetry and the centroid is the centre of the arena. As the computation of principal axes does not take featural cues into account, the use of directions specified by principal axes can explain rotational errors. Principal axes have a simple physical description and they are easy to calculate; but as summary descriptions of shape, they leave much to be desired. By definition, they are straight lines intersecting at right angles, no matter what the shape. As characterizations of shape, they miss systematic bends, as found, for example, in the shape on the right of figure 2. They also miss what we might call the structure of space, such as the protruding blob on the left shape of figure 2. In fact, from the principal axes, ones knows very little about the shape. Other axes such as symmetry axes and medial axes capture much more about the shape, while still remaining computationally economical. 3.2
Symmetry axes and medial axes
Leyton (1992: chapter 6) described a number of theoretical possibilities for computing axes of symmetry in a space. Unlike principal axes, axes of symmetry may curve. One set of axes is arrived at by inscribing circles in the shape. Points where the circles are tangent to the shape are considered to be symmetric pairs, and different formal definitions can characterize the line of symmetry. For example, the middles of the inscribed circles or the middles of the chords connecting symmetric pairs might make up the line of symmetry. Such axes of symmetry would capture the ‘C’ shape at the right of figure 2. As different ‘chunks’ of space might be fitted each with its own axis, something of the structure of space might be captured as well. Medial axes are another theoretical possibility (Fritsch et al. 1994, Pizer et al. 1999). These axes, designed explicitly for medical image analysis, capture a lot of shape information without being computationally expensive. Intuitively, a trunk-and-branch structure is fitted in the shape to summarize ‘the track of the middle of a figure and the associated width variation’
Figure 2. An E-shaped (left) and C-shaped (right) space. The first principal axis of each space would be a straight line through the length of the space. Symmetry axes and medial axes would bend and branch in the case of the E-shaped space, capturing some of the overall characteristics of each of the shapes. See text for further explanations.
10
K. Cheng
(Fritsch et al. 1994: 448). The branches point to the boundary, while the trunk connects the medial primitives at which the branches meet. Like axes of symmetry, the medial axes also capture bends in a space and something of the structure of space. Branching structures like blobs are given their own set of medial axes, and these sets are linked to the ‘parent’ space. In addition, something of the widening and narrowing of space is also captured, basically by the lengths of the branches. The end product ‘is sensitive to global shape . . . in a way which ignores detail variation’ (Fritsch et al. 1994: 448). All these schemes based on axes have in common two key characteristics. The first is that matching is based on a few global parameters. The second is that the parameters are computed based on geometric shape, and in fact the entire shape; in short, they are shape parameters. In transformational terms, ‘being based on shape’ means that these parameters are preserved under translations, rotations and uniform magnifications, the transformations that preserve shape. These matching schemes are robust and computationally cheap. Robustness means that small mistakes in computations lead to small errors. If the metric properties are measured approximately, almost always the case with biological systems, or if a small chunk of space is missed altogether, the computed axes will be incorrect, but by a small margin. Contrast this with the local strategy of using a single conspicuous object as a pole for direction, the strategy of matching the featural properties of this conspicuous object. If one should make a mistake in matching and pick an object to the west rather than the correct one to the north, the error would be immense. The empirical results from Cheng’s (1986) study show that even a white wall against three black walls was not a preferred directional cue for the rats. To overcome the problem of mismatches of single objects, one strategy is to match many features or many objects. This strategy, however, runs into a computational explosion. As the space gets more complex or bigger, the number of possible matches between objects in one’s representation and objects in the world explodes. A second strategy to overcome mistaken object identities is to increase perceptual capabilities and simultaneously representational capabilities. That is, one encodes so much about the target object that mistakes are not possible. This too is costly for the brain, basically another kind of computational explosion. In contrast, the global matching schemes cut the field down to a few parameters, drastically cutting down computational explosions that arise with increasing size of space. Except for some artificially constructed environments such as rectangular arenas, global geometry in the real world just about always specifies a region unambiguously. One can then use local cues in the correct region for an exact search, as explained more below.
3.3 Geometry of objects I am grateful to one reviewer for pointing out a set of alternatives to shape geometry, which might be called the geometry of objects. A parameter specifying direction is derived out of a set of individual objects. The schemes use objects as objects; they do not need to be distinguished one from another. O’Keefe (1991) formulated one such scheme. The axis is formed by computing the directions between all possible pairs of objects (slopes in an arbitrary Cartesian frame) and then averaging the resulting slopes. Such a scheme suffers from computational explosion. As the number of objects increase to n, the number of pairs of objects reaches the order of n2 . In a parenthetical reformulation, Benhamou (1998) proposed that an encompassing ellipse be drawn around the objects in question and then the major axis (which is the first principal axis) of the ellipse be used to specify direction. This scheme resembles the principal axes in that a single straight line is computed as an orienting axis. It does not suffer from computational explosions. It differs from the calculation of principal axes, however. In an
Geometry and navigation
11
enclosing ellipse, the two axes always intersect at their middles, even if there are more points in one half of the ellipse than the other. Intersecting at the middle is not a mandatory property with principal axes. In asymmetric spaces, there is a long end and a short end of each axis, and this information can be used to assign distinct poles to the two ends of the axis. I can think of some variations to Benhamou’s (1998) ellipse-enclosing scheme that circumvent the property of always intersecting at the middles. One simple scheme is to calculate the principal axes based on a set of conspicuous objects. That is, one treats the conspicuous objects as points and computes principal axes based on a small number of points. This scheme preserves the ‘lopsidedness’ of asymmetric spaces. If there are more objects in one half of space than the other, the axes will not intersect at their middles. Polarity can be assigned to the ends of the axes. Another set of variants can be found by enclosing the points by something other than an ellipse, for example, by joining the outermost points. This will create lopsided figures in general. One can then apply any of the schemes discussed to such a figure: principal axes, symmetry axes, or medial axes. With this contrast of surface-based and object-based geometry, I do not mean to imply that they are mutually exclusive hypotheses or even separate systems. After all, the kinds of properties to be extracted are shape parameters in both cases. The parameters are preserved under transformations that preserve shape. It may be that surface-based and object-based schemes just compute geometry at different scales. Objects may provide geometry at a finer scale or a higher spatial frequency (Poucet and Benhamou 1997). As discussed, characterizing geometry at different scales is also a feature of medial axes (Fritsch et al. 1994).
3.4
Relevant data
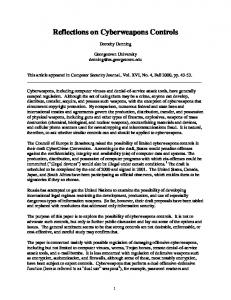
On objects and directional cues, Benhamou and Poucet’s (1998) data on rats are especially relevant. Rats were trained in a round swimming pool surrounded by a circle of curtains. This meant that nothing about the shape of the pool provided directional cues. Three distinct landmarks were provided for localization, and the target was at a constant location with respect to these landmarks. If the landmarks formed an equilateral triangle, then the arrangement of landmarks was insufficient for specifying direction. The rats must use the featural properties or identities of the landmarks. They failed to do so in 75 trials of training. If the landmarks formed an isoceles but non-equilateral triangle, then object arrangement alone could be used to specify direction. Such a task is harder than a standard pool task with lots of external cues (Poucet et al. 2003), but the rats at least solved this task. This suggests that the geometry of objects can be used to specify direction, but not the identities of objects, consistent with the object-based schemes described in section 3.3. Two recent papers tested the way in which geometric information is used in rats (Pearce et al. 2004) and chicks (Tommasi and Polli 2004). Both used the transformational strategy (Cheng and Spetch 1998). In this strategy, an animal is first trained to find a location in one space. It is then tested in various modified or transformed spaces. Both the rats and the chicks showed robust transfer across shape transformations. This shows that shape congruence was not necessary for performance. Cheng and Gallistel (2005), however, showed that matching on the basis of the principal axis of space can account for all the data. Pearce et al. (2004) trained rats to swim to one corner of a rectangular swimming pool without featural cues (figure 3, left). The rats learned the task up to rotational ambiguity, searching as often at the diagonally opposite corner (rotational error) as at the target. The black dots show their two preferred corners for searching when tested in a kite-shaped space (figure 3, right). Cheng and Gallistel suggested that, by drawing an axis through the middle of each space, the principal axis, the chosen locations in the test space could be considered
12
K. Cheng
Figure 3. An experiment from Pearce et al. (2004). Rats were trained to find a target (black dot) in a rectangular swimming pool without featural cues (left) and then tested in a kite-shaped pool (right). Without featural cues in the training space, the rats searched as often at the rotational error (diagonally opposite the target) as at the target. The black dots in the right panel show the preferred corners at which the rats searched. Superimposed (in dotted lines) is the training space with some medial axes drawn in it. Two indistinguishable target locations (grey dots) that are geometrically equivalent are shown. The best matches for these locations are the locations at which the rats preferred to search. See text for further explanation.
as best matches. In figure 3 (right) a training space also has been superimposed with a set of medial axes drawn in. The ends of the thickened branches show the target location (including the unresolvable rotational symmetry). The apex is the only plausible corner for matching the bottom left branch, even though the match is poor. The other black dot to the top right is clearly the best match for the top right branch, the obtuse angle to the top being matched to the top branch. Tommasi and Polli (2004) trained chicks to go to one corner of a parallelogram (2:1 ratio in angles and in lengths) for food, again without featural cues. For different groups, the target corner was acute or obtuse (figure 4, left). Both groups learned the task up to rotational ambiguity, searching at the target and the diagonally opposite corner (rotational error) equally often. On the right of figure 4, the transformation with the most interesting result, a reflection, is shown. On this test, both groups chose the acute corner. Again, superimposing the principal axes of training and test spaces explains the choices (Cheng and Gallistel 2005). I have put in another form of axes on the right of figure 4. This is an axis of symmetry with three legs to it. The superimposed training space was fitted by eye, but it does the job of showing that the most appropriate choice in the test space for both groups is an acute corner. 3.5 Suggestions for research We have two kinds of research strategies in investigating the kinds of axes that are encoded about spaces: rotational errors and the transformational strategy. Regarding rotational errors, the idea is to delimit the kinds of spaces in which they are systematic. For example, consider the spaces in figure 2. If a bent axis (symmetry axis or medial axes) were fitted to the space, one would not expect any rotational errors. But if a straight axis such as a principal axis were used, rotational errors would be possible. If the E-shaped space is drawn correctly instead of drawn roughly by free hand, the top right and bottom left ‘corners’ might have similar local characteristics (such as curvature) and stand in a similar relation to the principal axes. Rotational errors are then possible, indeed expected, with a scheme of matching by principal axes. No rotational errors are expected with medial axes or axes of symmetry.
Geometry and navigation
13
Figure 4. An experiment from Tommasi and Polli (2004). Two groups of chicks were trained in the parallelogram without featural cues (left) to find food in a particular corner. The two dots represent the target locations of the two groups. Without featural cues in the training space, each group of chicks searched as often at the rotational error (diagonally opposite the target) as at the target. The right panel shows a test in a reflected parallelogram. Both groups of chicks preferred to search at an acute corner. The rotational errors are not shown in the figure, but the chicks again made as many rotational errors as correct choices, there being no cues to distinguish the two. Superimposed is the training space (in dotted lines). Both training and test spaces have symmetry axes drawn in them. The three-legged axis bisects each of the acute corners and runs down the middle between the parallel long walls. The superimposition is done by eye, without formal matching criteria, but the two spaces coincide at their respective centroids. The exact superimposition matters little. It is clear from the figure that both groups are predicted to choose the acute corner.
Regarding the transformational strategy, far more kinds of transformations are needed than what is in the extant data. The results from Pearce et al. (2004) and Tommasi and Polli (2004) show how interesting this strategy can be. At this point, the best strategy is probably to get a lot of transformational data. This would help to constrain theorizing, and would probably lead to ideas that we have not thought of yet. In addition, we ought to liberate ourselves from the traditional rectilinear spaces imposed on lab animals. The typical natural landscape is curved and not characterized by abrupt discontinuous changes in curvature found in corners. Even if a space in a lab is necessarily a ‘bonsai’ space, we can still mimic some characteristics of the real world. We might also consider geometric cues found in the real world, in which walls bounding a flat space are not typical. One reviewer suggested objects, especially those that stick out conspicuously from the ground. Without having to identify which object is which, one can calculate various geometries based on these objects, as already discussed. A second possibility worth exploring is slope. The lie of the land typically has slopes. The shape of the valley that one is in can provide directional axes, as can the direction of slopes. From this viewpoint, walls are just discontinuously steep slopes. Recent research using the vertical surface of a monitor has shown, perhaps not surprisingly, the vertical axis to be special for humans (Kelly and Spetch 2004a) and pigeons (Kelly and Spetch 2004b). Geometric learning does not transfer across rotations on the vertical surface. It is not hard to impose slopes on horizontal lab paradigms if animals perform on dry land rather than in a swimming pool.
14
K. Cheng
3.6 Global and local strategies All this talk of global matching strategies is not to deny local strategies. It is certain that animals from arthropods to birds to mammals use local cues in navigation. In my view, a combination of global and local strategies is very likely to be the case. Local cues play a part in various forms of route-based behaviour. These are best described for arthropods (Collett and Collett 2002, Cheng 2005), and I have characterized them as place-finding servomechanisms triggered by appropriate contextual stimuli (Cheng 2005). Classic research on route following in rats (Calhoun 1963), however, suggests that this type of behaviour might be found in rodents as well. Landmarks figure in local strategies. Common sense suggests that using landmarks near the target is more accurate for localization. Much experimental evidence supports this, and also tells something about what the local strategies are. Thus, nearer and bigger landmarks are given more weight (bees: Cheng et al. 1987; birds: Bennett 1993, Spetch 1995; humans: Spetch 1995). Weber’s law means that searching with a nearer landmark is more accurate (Cheng 1990, 1992). A number of lines of research suggest that vectors to landmarks are used in pinpointing a target. In Cartwright and Collett’s influential (1982, 1983) snapshot models, honeybees average directional vectors to landmarks in piloting. Vectors to landmarks are also implicated in a substantial body of research on pigeons (Cheng 1988, 1989, 1990, 1994, 1995, Cheng and Sherry 1992, Spetch et al. 1992, 1996, 1997, Spetch and Wilkie 1994, Cheng and Spetch 1995, Spetch 1995, Lechelt and Spetch 1997) and on other birds (GouldBeierle and Kamil 1998). These are classic algebraic vectors with components of direction and distance. They include vectors to individual objects and vectors to extended surfaces (Cheng 1988, 1989, 1990, 1994, 1995, Cheng and Sherry 1992). A more recent substantial body of theoretical and empirical work suggests that the rat hippocampus plays a role in encoding vectors (O’Keefe and Burgess 1996, Burgess et al. 2000, Hartley et al. 2000, Lever et al. 2002, Anderson et al. 2003, Jeffery and Anderson 2003). Landmarks often need to be stable in order for animals to measure vectors from them. Biegler and Morris (1996) found that rats used a single landmark better for localization when it was stable. Another example comes from some unpublished data from my work on landmark use in pigeons. The pigeons were oriented in the studies. A wooden block was used in some experiments (e.g. Cheng 1988, 1989). It usually stood at one wall of a square arena, and sometimes its characteristics were changed (e.g. height), or it was shifted some distance along the wall. The pigeons searched readily under such conditions. When the block was displaced to a different wall, however, the pigeons ignored this block altogether. They continued searching somewhere along the wall where the block used to be, although searching was much reduced. Aside from vectors, another form of navigation using local information is beaconing, heading towards a recognized object. In Morris’s classic (1981) paper on rats swimming to hidden targets in a pool, the rats could also learn to head to a visible target whose location was arbitrary and varied from trial to trial. For navigational purposes, beacons often need to be stable. Thus, Devenport and Devenport (1994) trained rodents (squirrels and chipmunks) to come to a feeder for food. When the beacon (feeder) was subsequently shifted a small distance and still within sight of approaching subjects, the rodents did not head straight to the beacon, but searched where the feeder used to be. In this case, a shifted beacon needed to be learned anew. Shettleworth and Sutton (2005) trained rats to forage in a large 16-sided arena, their home cage being placed at the edge of the arena. A prominent beacon hung over the entrance to the home. If the beacon was shifted a little (45◦ ) from its usual position, it controlled homing behaviour: the rats headed to the beacon. With substantial shifts (90◦ ), however, the beacon was ignored; the rats relied on path integration or dead reckoning. Parallel results have been found with hippocampal place cells (Rotenberg and Muller 1997). A polarizing cue was rotated
Geometry and navigation
15
with the rat still in the arena. Large rotations do not realign the preferred place of firing of a hippocampal cell; small rotations do so. Insects are also known to use beacons (Cheng 2000, Collett and Collett 2002). An approach to a beacon probably requires the matching of multiple images of the beacon as seen from different distances (Judd and Collett 1998, Cheng 2005). Graham et al. (2003) trained wood ants to approach a source of food over a homogeneous laboratory terrain. One prominent beacon (black cylinder) was provided, which did not stand on the direct route between the starting point and the food. Interestingly, such beacons have a natural attraction, and the ants learned first to approach the beacon, and then to head from there to the food. Beacon displacement was then effected. Even more interestingly, the ants then headed not to the displaced beacon, but to the location where the beacon usually was. These results on the importance of landmark and beacon stability suggest to me an interaction between global and local representations. That shifted beacons are sometimes followed, in the ‘geometry’ studies for example, in pigeons (Kelly et al. 1998) and chicks (Vallortigara et al. 1990), does not negate this fact. I see the results described above as an existence proof. Sometimes, the use of a beacon or landmark is based in good part on its location in global space. A global representation points the animal to a region of space in which more accurate local cues can then take over the job of navigation. This interaction makes theoretical sense. Local cues are good to use because they produce more accurate localization (Cheng 1990, 1992); but they are good if, and importantly only if, they are the right ones. In artificial intelligence, this is the problem of perceptual aliasing (e.g. Egerton et al. 2000). Too many objects in the world may fit a description such as ‘door’ or ‘tree’. Using the wrong door or the wrong tree is worse than useless. One can be systematically wrong by a large amount. Egerton et al. (2000) suggested using a geometric frame, a global representation, to reduce this problem. In artificial intelligence, representations of space at multiple levels have been found to be necessary (Davis 1986). If the work of the brain is costly (Attwell and Laughlin 2001, Laughlin 2001), then parsimony might be as important in the evolution of the brain as it is in our scientific thinking. One way of economizing is to do away with whole classes of representations. An example is to use only local strategies and abandon all global representations. To me, however, this kind of parsimony is perverse, and in fact does not economize at all. The reason is that the local representations would require extremely high precision, and this comes at a huge cost. For example, what kinds of perceptual and representational systems are needed to single out one tree from all other trees in a city park without reference to the locations of trees? Global representations also need to economize. Thus, encoding the entire shape, as implied in Cheng (1986), is computationally too demanding; I now believe that I was wrong in suggesting a shape module. It suffers from a similar computational explosion: the more complex the shape, the more computational power it takes. Much of the complexity thus encoded will be wasted, in that the animal may never use the information. All one needs is a ‘summary statement’ that points to the correct region; and then the local cues, the right ones, can do a much better job of exact specification of target location. A judicious combination of global and local strategies can serve to keep both undemanding, and economize overall.
4. Theoretical considerations: II. Modularity Modularity is a key notion much discussed in the cognitive sciences (Chomsky 1980, Fodor 1983, 2001, Gallistel 1990, 2000, 2002, Coltheart 1999, Cheng and Newcombe 2005). The basic idea of modularity is that different modules or dedicated units in the brain do different
16
K. Cheng
specialized tasks. In contrast is a view that general processes, often associative in nature, characterize the work of the brain. The geometry of surfaces has been launched into this debate since the discovery of rotational errors. The words ‘purely geometric module’ appeared in the title of Cheng’s (1986) paper, and arguments continue to this day about a dedicated unit of the brain, a geometric module devoted to processing only geometric information. Different authors define modularity differently, but some key characteristics can be outlined. Domain specificity is a key element. Coltheart (1999) considers this to be the defining characteristic of a module. Whether the other typical properties are found then becomes a matter for empirical investigation. He suggests that processes such as reading may well be modular, although clearly not innate. Domain specificity describes a theoretical view of learning as special adaptations tailored to each domain of learning through the course of evolution (Chomsky 1980, Gallistel 2000, 2002). Different modules or ‘mental organs’ are devoted to different learning processes (Chomsky 1980). One of these mental organs has the job of learning language (Chomsky 1980, Pinker 1997). Other modules learn different things, such as the spatial layout of the environment. In modern learning theory, this view is championed by Gallistel (1990, 2000, 2002, 2003), who argues against any general learning process and suggests that learning takes place chiefly by a number of specialized systems, each dedicated to a particular task of computing and extracting information about some aspect of the world. In Gallistel’s (2002, 2003) view, even what has been taken as general learning, namely conditioning, is a learning module, one information-extracting learning module among many. Fodor’s influential (1983, 2001) views deal with information processing and use online rather than learning. Fodor had two theses in the 1983 book. The first is that peripheral processing systems, including much of perception, are very probably modular. They usually contain a suite of characteristics, although none is definitive or necessary. They are typically domain specific, fast, obligatory, innately specified and, importantly, operate on only a subset of available information. This last concept is called encapsulation and is perhaps taken to be the most important characteristic of modularity (Newcombe 2002, Wang and Spelke 2002, 2003). It means that some kinds of information, although available in the animal’s brain, do not enter a module. While Fodor (1983, 2001) considers peripheral systems to be largely modular, he conceives central cognition to be largely non-modular. They have access to all available information of potential use. Central information processing is based on one large web of knowledge (Quine and Ullian 1970). In this light, an interesting question concerning modularity and geometry is whether some subsystem or module, a central module, processes only geometric information, not featural information. Such a geometric module would violate Fodor’s claim that the central system is non-modular. Cheng and Newcombe (2005: figure 3), in being as neutral as possible, presented three different views of modularity. In a strong view of modularity, Wang and Spelke (2002, 2003) considered geometric and featural information to be processed by completely different modules. Geometric information, and only that, is used in reorientation after disorientation. If features are used, they are used by other modules, such as a view-matching module. Rotational errors occur if featural modules are not engaged. In Cheng (1986), the labour of encoding spatial properties is divided in the brain. One subunit, the geometric frame or geometric module, has the job of encoding just the geometric properties. It serves as the main map for a space, co-ordinating all spatial information. This map would contain labels for looking up other information at key locations. We can think of these as instructions to consult other inset maps showing more details about a particular locale. Here, the relocation system is all one, but it has separate subcomponents. Rotational errors occur if features are not pasted on to the geometric frame. In a non-modular view, Newcombe (2002) supposed that featural and geometric information are encoded together in one representation. How can rotational errors arise? The featural information might not have been encoded in memory; this can explain
Geometry and navigation
17
rotational errors in any view of modularity. Or they might be encoded, but the animal puts little weight on them, perhaps, for example, considering them to be unreliable. My current view, necessarily speculative, is based on two key assumptions. (1) The system uses a matching procedure for establishing heading (which direction is which) based on shape parameters, along the lines of the axes discussed above. This process is modular in that only shape information, nothing else, is used; it fits with Wang and Spelke’s (2002, 2003) view. Unlike Cheng’s (1986) geometric frame, it is not the entire shape that is encoded. This process is used for establishing heading, not for exact localization. (2) Geometric and featural information are encoded together in one record for localization. This process is non-modular and fits with Newcombe’s (2002) views. This point is not without empirical backing. In one situation presented to pigeons, the target was in a square arena with half-metre-high walls, in front of a piece of blue cardboard against the wall (Cheng 1988). When the cardboard was shifted, the pigeons averaged the dictates of the shifted cardboard and other unshifted landmarks. A cardboard on the wall is a featural cue. Distances from walls or corners are geometric cues. The birds must surely have averaged the dictates of geometric and featural cues. It is reasonable to suppose, then, that all this information is encoded together in one system. How does one conjoin a modular process and a non-modular representational structure? This is foreshadowed in the discussion of Cheng (1986: 172), and it is worth quoting a passage at length: To speak of separate modules and systems is not to claim that these are necessarily separate stores of information each with its own contents. It might be that all potentially useful information for spatial orientation is stored together in one record, but that different access rules make one kind of information, the geometric, more accessible for navigational purposes. The data cannot decide between the one store or many stores issue, and the terminology of ‘systems’ and ‘modules’ is meant to be neutral on this point.
I now break the neutrality and suggest that it is one store, but with some (at least one) modular processes that access only some of the information (figure 5). This view embraces a non-modular encoding structure with some modular processes that access only some of the information. Systematic rotational errors can come about because features have not been encoded, or they can result, in a fashion like a cognitive illusion, from a heading process based on shape parameters. The views presented here accord with a modular view of learning (Chomsky 1980, Gallistel 1990, 2000, 2002). Not only is the modular process of heading determination by shape parameters a good example of modularized computation, but also I would argue that the entire business of recording the metric layout of the environment, of both geometric and featural information, has its own rules of computation and is very probably a specialized process. Does a process of determination of heading based on shape parameters contradict Fodor’s (1983, 2001) non-modular claims for central processing? Not necessarily. Cheng and Newcombe (2005: figures 4 and 5) suggested that the outputs of different processes might still be integrated (a more positive word than non-modular) at output, and methods for testing such claims were suggested. Although the heading determination process based on shape parameters is modular, I suspect that its output is integrated with other sources of directional information if they are available. Inertial information, for example, is another source, as is the sun compass. In typical ‘geometry’ experiments, these sources are excluded by experimental design. Newcombe and I take Jacobs and Schenk (2003) to be suggesting that different sources of directional information are all integrated in a bearing system that is embodied in an evolutionarily older part of the hippocampus. In short, subcomponents might be modular (as Cheng (1986) suggested) and various learning processes might be modular (as Gallistel (1990, 2000, 2002) suggested), but at output, in guiding action, an animal will integrate all sources of information (as Fodor (1983, 2001) suggested).
18
K. Cheng
Figure 5. Modularity and the relocation task. In this view, input systems are largely modular (Fodor 1983); but all the information, geometric and featural, is stored together; in this sense, the central system is non-modular. One orientation process, the heading-by-axes process, however, extracts shape parameters such as the principal axis or an axis of symmetry, to be used for determining heading. This process is modular; it does not draw on featural information. Other processes, those used for exact localization, use both featural and geometric information, but probably concentrate on cues near the target. See text for further explanation.
5.
Concluding remarks
Science seems to reflect cognition. I have tried to integrate various major views of spatial cognition here, and show that each contains some element of truth. To retrace the steps, I started by considering what might be encoded about the geometry of space, then suggested that some global encoding is likely, perhaps taking the form of principal axes, symmetry axes, or medial axes of space. This deterministic global encoding is required to cut down the complexity of using local information. The global process is not designed to take in all geometric information (not the entire shape of space), but only a subset, so that the process does not explode in computational complexity with the complexity of the space. Using such a process then allows a small subset of local cues to be identified and used; this means that local processes do not explode in computational complexity, always being limited to a small region. I have suggested, based largely on the research on spatial searching in pigeons (Cheng 1988, 1989), that local processes use both geometric and featural information. Squaring these two points led to a view of modularity with regard to featural and geometric information. Featural and geometric information are encoded together; this means that they can be averaged and integrated in exact localization. One process of determining heading, however, is based solely on shape parameters and is hence modular. This is a global process of establishing which direction is which in order to pick out a local region to search in. Being based only on shape parameters, it is a modular component or process in orientation. Such a view, discussed as a possibility in Cheng (1986), contains elements of the views of strong modularity by Wang and Spelke (2002, 2003), of integrated information representation by Newcombe (2002), and of the modularity of components by Cheng (1986). In summary, the idea of a geometric module arose from a systematic error that rats made in a relocation task in a rectangular arena (Cheng 1986). The rat confused locations that stood in
Geometry and navigation
19
the same geometric relation with respect to the shape of the arena. These locations are clearly distinguishable if featural information such as patterns on walls or smells in the corners are used to define a location. The systematic rotational errors mean that sometimes the rat used only geometric information. This work has led to research on the relocation task in a number of other vertebrate animals, including humans. Is there a geometric module? Yes and no. Yes, there is a modular process based solely on shape parameters. No, there is no separate store for geometric information and a fortiori no separate relocation system based solely on geometry.
Acknowledgement I am indebted to Randy Ilistel for bringing to my attention the concepts of symmetry axes and medial axes.
References M.I. Anderson, R. Hayman, S. Chakroborty and K.J. Jeffery, “The representation of context”, in The Neurobiology of Spatial Behaviour, K.J. Jeffery, Ed., Oxford: Oxford University Press, 2003, pp. 274–294. D. Attwell and S.B. Laughlin, “An energy budget for signaling in the grey matter of the brain”, J. Cereb. Blood Flow Metab., 21, pp. 1133–1145, 2001. S. Benhamou, “Place navigation in mammals: a configuration-based model”, Anim. Cognit., 1, pp. 55–63, 1998. S. Benhamou and B. Poucet, “Landmark use by navigating rats (Rattus norvegicus): contrasting geometric and featural information”, J. Comp. Psychol., 112, pp. 317–322, 1998. A.T.D. Bennett, “Spatial memory in a food storing corvid: I. Near tall landmarks are primarily used”, J. Comp. Physiol. A, 173, pp. 193–207, 1993. R. Biegler, “Possible uses of path integration in animal navigation”, Anim. Learn. Behav., 28, pp. 257–277, 2000. R. Biegler and R.G.M. Morris, “Landmark stability: further studies pointing to a role in spatial learning”, Q. J. Exp. Psychol., 49B, pp. 307–345, 1996. N. Burgess, A. Jackson, T. Hartley and J. O’Keefe, “Predictions derived from modelling the hippocampal role in navigation”, Biol. Cybernet., 83, pp. 301–312, 2000. J.B. Calhoun, The Ecology and Sociology of the Norway Rat, Bethesda, MD: US Department of Health, Education, and Welfare, 1963. B.A. Cartwright and T.S. Collett, “How honeybees use landmarks to guide their return to a food source”, Nature, 295, pp. 560–564, 1982. B.A. Cartwright and T.S. Collett, “Landmark learning in bees”, J. Comp. Physiol. A, 151, pp. 521–543, 1983. K. Cheng, “A purely geometric module in the rat’s spatial representation”, Cognition, 23, pp. 149–178, 1986. K. Cheng, “Some psychophysics of the pigeon’s use of landmarks”, J. Comp. Physiol. A, 162, pp. 815–826, 1988. K. Cheng, “The vector sum model of pigeon landmark use”, J. Exp. Psychol.: Anim. Behav. Processes, 15, pp. 366–375, 1989. K. Cheng, “More psychophysics of the pigeon’s use of landmarks”, J. Comp. Physiol. A, 166, pp. 857–863, 1990. K. Cheng, “Three psychophysical principles in the processing of spatial and temporal information”, in Cognitive Aspects of Stimulus Control, W.K. Honig and J.G. Fetterman, Eds, Hillsdale, NJ: Erlbaum, 1992, pp. 69–88. K. Cheng, “The determination of direction in landmark-based spatial search in pigeons: a further test of the vector sum model”, Anim. Learn. Behav., 22, pp. 291–301, 1994. K. Cheng, “Landmark-based spatial memory in the pigeon”, in The Psychology of Learning and Motivation, Vol. 33, D.L. Medin, Ed., New York: Academic Press, 1995, pp. 1–21. K. Cheng, “How honeybees find a place: lessons from a simple mind”, Anim. Learn. Behav., 28, pp. 1–15, 2000. K. Cheng, “Arthropod navigation: ants, bees, crabs, spiders finding their way”, in Comparative Cognition: Experimental Explorations of Animal Intelligence, E.A. Wasserman and T.R. Zentall, Eds, Oxford: Oxford University Press, 2005, in press. K. Cheng, T.S. Collett, A. Pickhard and R. Wehner, “The use of visual landmarks by honeybees: bees weight landmarks according to their distance from the goal”, J. Comp. Physiol. A, 161, pp. 469–475, 1987. K. Cheng and C.R. Gallistel, “Shape parameters explain data from spatial transformations: comment on Pearce et al. (2004) and Tommasi and Polli (2004)”, J. Exp. Psychol.: Anim. Behav. Processes, 31, pp. 254–259, 2005. K. Cheng and N.S. Newcombe, “Is there a geometric module for spatial orientation? Squaring theory and evidence”, Psychon. Bull. Rev., 12, pp. 1–23, 2005. K. Cheng and D.F. Sherry, “Landmark-based spatial memory in birds: the use of edges and distances to represent spatial positions”, J. Comp. Psychol., 106, pp. 331–341, 1992. K. Cheng and M.L. Spetch, “Stimulus control in the use of landmarks by pigeons in a touch-screen task”, J. Exp. Anal. Behav., 63, pp. 187–201, 1995.
20
K. Cheng
K. Cheng and M.L. Spetch, “Mechanisms of landmark use in mammals and birds”, in Spatial Representation in Animals, S. Healy, Ed., Oxford: Oxford University Press, 1998, pp. 1–17. N. Chomsky, Rules and Representations, New York: Columbia University Press, 1980. T.S. Collett and M. Collett, “Memory use in insect visual navigation”, Nature Rev. Neurosci., 3, pp. 542–552, 2002. M. Coltheart, “Modularity and cognition”, Trends Cognitive Sci., 3, pp. 115–120, 1999. E. Davis, Representing and Acquiring Geographical Knowledge, London: Pitman, 1986. J.A. Devenport and L.D. Devenport, “Spatial navigation in natural habitats by ground-dwelling sciurids”, Anim. Behav., 47, pp. 727–729, 1994. F.C. Dyer and J.L. Gould, “Honey bee navigation”, Am. Sci., 71, pp. 587–597, 1983. S. Egerton, V. Callaghan and P. Chernett, “A biologically inspired mapping model for autonomous mobile robots”, in New Frontiers in Computational Intelligence and its Applications, M. Mohammadin, Ed., Amsterdam: IOS Press, 2000, pp. 20–29. A.S. Etienne and K.J. Jeffery, “Path integration in mammals”, Hippocampus, 14, pp. 180–192, 2004. J.A. Fodor, The Modularity of Mind, Cambridge, MA: MIT Press, 1983. J.A. Fodor, The Mind Doesn’t Work that Way, Cambridge, MA: MIT Press, 2001. D.S. Fritsch, S.M. Pizer, B.S. Morse, D.H. Eberly and A. Liu, “The multiscale medial axis and its applications in image registration”, Pattern Recognit. Lett., 15, pp. 445–452, 1994. A. Gagliardo, P. Ioalé and V.P. Bingman, “Homing in pigeons: the role of the hippocampal formation in the representation of landmarks used for navigation”, J. Neurosci., 19, pp. 311–315, 1999. C.R. Gallistel, The Organization of Learning, Cambridge, MA: MIT Press, 1990. C.R. Gallistel, “The replacement of general-purpose learning models with adaptively specialized learning modules”, in The New Cognitive Neurosciences, M.S. Gazzaniga, Ed., Cambridge, MA: MIT Press, 2000, pp. 1179–1191. C.R. Gallistel, “The principle of adaptive specialization as it applies to learning and memory”, in Principles of Human Learning and Memory, R.H. Kluwe, G. Lüer and F. Rösler, Eds, Berlin: Birkhäuser, 2002, pp. 250–280. C.R. Gallistel, “Conditioning from an information processing perspective”, Behav. Processes, 62, pp. 89–101, 2003. K.L. Gould-Beierle and A.C. Kamil, “Use of landmarks in three species of food-storing Corvids”, Ethology, 104, pp. 361–378, 1998. S. Gouteux, C. Thinus-Blanc and J. Vauclair, “Rhesus monkeys use geometric and nongeometric information during a reorientation task”, J. Exp. Psychol.: Gen., 130, pp. 505–519, 2001. P. Graham, K. Fauria and T.S. Collett, “The influence of beacon-aiming on the routes of wood ants”, J. Exp. Biol., 206, pp. 535–541, 2003. T. Hartley, N. Burgess, C. Lever, F. Cacucci and J. O’Keefe, “Modeling place fields in terms of the cortical inputs to the hippocampus”, Hippocampus, 10, pp. 369–379, 2000. A. Hayward, A. McGregor, M.A. Good and J.M. Pearce, “Absence of overshadowing and blocking between landmarks and geometric cues provided by the shape of a test arena”, Q. J. Exp. Psychol., 56B, pp. 114–126, 2003. L. Hermer and E. Spelke, “Modularity and development: the case of spatial reorientation”, Cognition, 61, pp. 195–232, 1996. L.F. Jacobs and F. Schenk, “Unpacking the cognitive map: the parallel map theory of hippocampal function”, Psychol. Rev., 110, pp. 285–315, 2003. K.J. Jeffery and M.I. Anderson, “Dissociation of the geometric and contextual influences on place cells”, Hippocampus, 13, pp. 868–872, 2003. S.P.D. Judd and T.S. Collett, “Multiple stored views and landmark guidance in ants”, Nature, 392, pp. 710–714, 1998. D.M. Kelly and M.L. Spetch, “Pigeons encode relative geometry”, J. Exp. Psychol.: Anim. Behav. Processes, 27, pp. 417–422, 2001. D.M. Kelly and M.L. Spetch, “Reorientation in a two-dimensional environment I: Do adults encode the featural and geometric properties of a two-dimensional schematic of a room?”, J. Comp. Psychol., 118, pp. 82–94, 2004a. D.M. Kelly and M.L. Spetch, “Reorientation in a two-dimensional environment: II. Do pigeons (Columba livia) encode the featural and geometric properties of a two-dimensional schematic of a room?”, J. Comp. Psychol., 118, pp. 384–395, 2004b. D.M. Kelly, M.L. Spetch and C.D. Heth, “Pigeon’s encoding of geometric and featural properties of a spatial environment”, J. Comp. Psychol., 112, pp. 259–269, 1998. S.B. Laughlin, “Energy as a constraint on the coding and processing of sensory information”, Curr. Opin. Neurobiol., 11, pp. 475–480, 2001. A.E. Learmonth, L. Nadel and N.S. Newcombe, “Children’s use of landmarks: implications for modularity theory”, Psychol. Sci., 13, pp. 337–341, 2002. A.E. Learmonth, N.S. Newcombe and J. Huttenlocher, “Toddlers’use of metric information and landmarks to reorient”, J. Exp. Child Psychol., 80, pp. 225–244, 2001. D.P. Lechelt and M.L. Spetch, “Pigeons’ use of landmarks for spatial search in a laboratory arena and in digitized images of the arena”, Learn. Motiv., 28, pp. 424–445, 1997. C. Lever, T. Wills, F. Caccucci, N. Burgess and J. O’Keefe, “Long term plasticity in hippocampal place-cell representation of environmental geometry”, Nature, 416, pp. 90–94, 2002. M. Leyton, Symmetry, Causality, Mind, Cambridge, MA: MIT Press, 1992. J. Margules and C.R. Gallistel, “Heading in the rat: determination by environmental shape”, Anim. Learn. Behav., 16, pp. 404–410, 1988. R.G.M. Morris, “Spatial localization does not require the presence of local cues”, Learn. Motiv., 12, pp. 239–260, 1981.
Geometry and navigation
21
N.S. Newcombe, “The nativist–empiricist controversy in the context of recent research on spatial and quantitative development”, Psychol. Sci., 13, pp. 395–401, 2002. N.S. Newcombe and J. Huttenlocher, Making Space: The Development of Spatial Representation and Reasoning, Cambridge, MA: MIT Press, 2000. J. O’Keefe, “The hippocampal cognitive map and navigational strategies”, in Brain and Space, J. Paillard, Ed., Oxford: Oxford University Press, 1991, pp. 273–295. J. O’Keefe and N. Burgess, “Geometric determinants of the place fields of hippocampal neurons”, Nature, 381, pp. 425–428, 1996. J.M. Pearce, M.A. Good, P.M. Jones and A. McGregor, “Transfer of spatial behavior between different environments: implications for theories of spatial learning and for the role of the hippocampus in spatial learning”, J. Exp. Psychol.: Anim. Behav. Processes, 30, pp. 135–147, 2004. J.M. Pearce, J. Ward-Robinson, M. Good, C. Fussell and A. Aydin, “Influence of a beacon on spatial learning based on the shape of the test environment”, J. Exp. Psychol.: Anim. Behav. Processes, 27, pp. 329–344, 2001. S. Pinker, How the Mind Works, London: Penguin, 1997. S.M. Pizer, D.S. Fritsch, P.A. Yushkevich, V.E. Johnson and E.L. Chaney, “Segmentation, registration, and measurement of shape variation via image object shape”, IEEE Trans. Med. Imag., 18, pp. 851–865, 1999. B. Poucet and S. Benhamou, “The neuropsychology of spatial cognition in the rat”, Crit. Rev. Neurobiol., 11, pp. 101–120, 1997. B. Poucet, P.-P. Lenck-Santini and E. Save, “Drawing parallels between the behavioural and neural properties of navigation”, in The Neurobiology of Spatial Behaviour, K.J. Jeffery, Ed., Oxford: Oxford University Press, 2003, pp. 187–198. W.V. Quine and J.S. Ullian, The Web of Belief, New York: Random House, 1970. A. Rotenberg and R.U. Muller, “Variable place-cell coupling to a continuously viewed stimulus: evidence that the hippocampus acts as a perceptual system”, Philos. Trans. R. Soc. London, Ser. B, 352, pp. 1505–1513, 1997. S.J. Shettleworth and J. Sutton, “Multiple systems for spatial learning: dead reckoning and beacon homing in rats”, J. Exp. Psychol.: Anim. Behav. Processes, 2005. V.A. Sovrano, A. Bisazza and G. Vallortigara, “Modularity as a fish (Xenotoca eiseni) views it: conjoining geometric and nongeometric information for spatial reorientation”, J. Exp. Psychol.: Anim. Behav. Processes, 29, pp. 199–210, 2003. M.L. Spetch, “Overshadowing in landmark learning: touch-screen studies with pigeons and humans”, J. Exp. Psychol.: Anim. Behav. Processes, 21, pp. 166–181, 1995. M.L. Spetch, K. Cheng and S.E. MacDonald, “Learning the configuration of a landmark array: I. Touch-screen studies with pigeons and humans”, J. Comp. Psychol., 110, pp. 55–68, 1996. M.L. Spetch, K. Cheng, S.E. MacDonald, B.A. Linkenhoker, D.M. Kelly and S.R. Doerkson, “Use of landmark configuration in pigeons and humans: II. Generality across search tasks”, J. Comp. Psychol., 111, pp. 14–24, 1997. M.L. Spetch, K. Cheng and M.V. Mondloch, “Landmark use by pigeons in a touch-screen spatial search task”, Anim. Learn. Behav., 20, pp. 281–292, 1992. M.L. Spetch and D.M. Wilkie, “Pigeons’ use of landmarks presented in digitized images”, Learn. Motiv., 25, pp. 245–275, 1994. L. Tommasi and C. Polli, “Representation of two geometric features of the environment in the domestic chick (Gallus gallus)”, Anim. Cognit., 7, pp. 53–59, 2004. L. Tommasi and G. Vallortigara, “Searching for the center: spatial cognition in the domestic chick (Gallus gallus)”, J. Exp. Psychol.: Anim. Behav. Processes, 26, pp. 477–486, 2000. G. Vallortigara, M. Zanforlin and G. Pasti, “Geometric modules in animals’ spatial representations: a test with chicks (Gallus gallus domesticus)”, J. Comp. Psychol., 104, pp. 248–254, 1990. J.P. Vargas, J.C. López, C. Salas and C. Thinus-Blanc, “Encoding of geometric and featural information by goldfish (Carassius auratus)”, J. Comp. Psychol., 118, pp. 206–216, 2004. K. von Frisch and M. Lindauer, “Himmel und Erde in Konkurrenz bei der Orientierung der Bienen [Sky and Earth in competition in the orientation of bees]”, Naturwissenschaften, 41, pp. 245–253, 1954. P.L. Wall, L.C.P. Botly, C.K. Black and S.J. Shettleworth, “The geometric module in the rat: independence of shape and feature learning in a food finding task”, Learn. Behav., 32, pp. 289–298, 2004. R.F. Wang and E.S. Spelke, “Human spatial representation: insights from animals”, Trends Cognitive Sci., 6, pp. 376–382, 2002. R.F. Wang and E.S. Spelke, “Comparative approaches to human navigation”, in The Neurobiology of Spatial Behaviour, K.J. Jeffery, Ed., Oxford: Oxford University Press, 2003, pp. 119–143. R. Wehner, “The polarization-vision project: championing organismic biology”, Fortschr. Zool., 39, pp. 103–143, 1994. R. Wehner and M.V. Srinivasan, “Path integration in insects”, in The Neurobiology of Spatial Behaviour, K.J. Jeffery, Ed., Oxford: Oxford University Press, 2003, pp. 9–30. R. Wehner and S. Wehner, “Insect navigation: Use of maps or Ariadne’s thread?”, Ethol. Ecol. Evolut., 2, pp. 27–48, 1990. W. Wiltschko and R.P. Balda, “Sun compass orientation in seed-caching scrub jays Apheloma coerulescens”, J. Comp. Physiol. A, 164, pp. 717–722, 1989.