Winnie Pooh" [4]. This frequently results in confusion. Thus, for example, the method of discrete- phase synthesis, described in reference 5, was referred to ...
The Use of Dynamic Program ming for Synthesis of Array Antennas with Discrete Phase Shifters YU. A. ABRAMOVICH AND B. G. DANILOV
The method of dynamic programming is used to solve the problem of synthesis of an array antenna with binary phasing which suppresses the sidelobes of the pattern at controlled points, for a specified amount of decrease of the main beam. This procedure allows one to obtain highly effective solutions which result in an almost total suppression of controlled sidelobes at the expense of an insignificant decrease of the directivity coefficient for arrays which contain several hundred radiators.
* * * The synthesis of array antennas with discrete phase shifters was considered in reference 1 from the point of view of separating the signals according to their angles of arrival. In this reference the problem of suppression of sidelobes of the pattern in a specified number of directions has been reduced to a problem in linear, integral programming. The results of computations have indicated that the optimum solutions possess a high effectiveness which is significantly superior to the effectiveness of the statistical methods of synthesis [2]. Therefore, a sensible continuation of these investigations would be a search for computational procedures which would enable one to synthesize large arrays, without guaranteeing a global optimality of the solutions, which is in contrast to the existing procedures of integral programming. In this article we investigate the effectiveness of the suppression of sidelobes of the pattern at a set of controlled points, and for a specified decrease of the modulus of the main beam, using the computational procedures of the dynamic programming. It is known from a personal statement of R. Bellman [3] that the description of the characteristics of dynamic programming that can be formulated within the framework of an "intuitive" principle of optimality, is very indeterminate because there exists a multitude of problems that can be included into the scheme of dynamic programming. For this reason there is also no general program for digital computer solution of dynamic programming problems, as it is the case with linear programming. For this reason, a special program must be written for each type of problem solved by this method, as it was indicated in reference 3 • These facts make the "principle of optimality ... just as elusive as the "well" of the Rabbit was to Winnie Pooh" [4]. This frequently results in confusion. Thus, for example, the method of discretephase synthesis, described in reference 5, was referred to dynamic programming, even though it actually is the classical method of coordinate descent, which was used for synthesis of biphase Signals in reference 6, for example. In view of this, the method proposed below will also not pretend to be universal and applicable to all possible problems of synthesis of discretely phased array antennas, but only to be the method most suitable for the problem considered in this article. Thus, we are required to synthesize a linear array which consists of N elements, with a uniform amplitude and a binary phase (f{l E {O, n}) distribution of the aperture current. The array must suppress n the sidelobes f. of the pattern in directions fA. = sin e. (i '" 1, M), under the condition that the decrease 1
1
1
of the main beam f of the pattern will not exceed some allowed value (N - K).
o
In other words, we are required to find a vector of phases f{ln which results in min ex= min max f.,1 __ 1. i = 1, M, under the condition that N
10= ~Cos!Pn~N-K,
(1)
n_l
where
qJnE{O, n};
and where ex is the maximum modulus of the pattern at controlled points, d/>, is the equivalent spacing between the elements and K= 2l, where l is the number of sign changes in broadside array. In optimization of a symmetrical array, K = 4l', where l' is the number of sign changes in one of the symmetrical parts of the array.
69
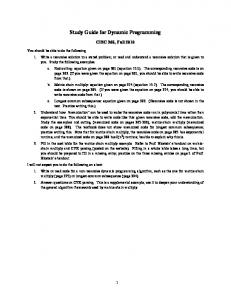
If(,a)1
!f(,a)l 'Ill ,J
3D
10
8 6
o
QZ
Fig. 2. N = 41.
Fig. 1. N = 15.
The problem formulated above can therefore be reduced to a distribution of L (l') sign changes among N (N/2) elements of the array, such that the level a of the pattern is minimized at controlled points "r Since only one change of sign can be present in a single element of the array, the coordinates of elements containing sign changes must not coincide. Moreover, a change of sign should by no means always reduce the sidelobes and therefore it will be necessary to introduce an additional, fictitious coordinate, "removed" beyond the boundaries of the array. The above indicated treatment of the optimization problem of a pattern as a problem in positioning enables us to use R. Bellmau'a optimization principle for construction of l ([I)-step computational procedure. When it is applied to our problem, this optimum strategy has the property that no matter what the distribution of the original t sign changes, the next t + 1-st sign change should be placed optimally with respect to the locations of the previous t sign changes [t