3D Signature Biometrics Using Curvature Moments Richard E. Haskell, Darrin M.Hanna, and Kevin Van Sickle
[email protected],
[email protected] School of Engineering and Computer Science Oakland University, Rochester, MI 48309
Abstract A new biometric identification method is introduced in which a user “writes” his or her signature in the air. Accelerometers worn on a wrist device transmit acceleration data wirelessly to a host computer that processes the data and authenticates the user. This paper describes the use of curvature moments associated with 3D curves in both configuration space and velocity space as the features used for recognition. The mean vector and covariance matrix associated with a particular person are stored as template data in the device and wirelessly transmitted to the host computer when recognition is desired. The host computes the Mahalanobis distance from a new transmitted feature vector to the template data and authenticates the user if this distance is below twice the average Mahalanobis distance of each training sample. Experimental results show the difficulty of an imposter being recognized as the real person.
independent of the orientation of the accelerometer sensors on the wrist. In this paper we describe the use of curvature moments as features for recognizing these 3D signatures. The curvature of the 3D curve as a function of distance along the curve is independent of the orientation of the three accelerometers used to collect the raw data. Moments of this curvature time series are used as classification features. To capture the velocity information the curvature of a velocity curve in velocity space is defined. Moments of this velocity curvature time series are combined with moments of the position curvature time series to produce the complete feature vector for a given signature. The methods used to compute the curvature of the position and velocity curves from the raw acceleration data are described in Section 2. In Section 3 the moments of the curvature time series used to form the feature vector are defined. Experimental results are presented in Section 4 and the conclusions are given in Section 5.
Keywords: Biometrics, Signatures, Features, Curvature, Moments
1. Introduction The need for a simple biometric authentication method to correctly identify a person is critical in a variety of applications including financial transactions, secure access control, and border and airline security [1]. We have previously described a new method in which the user wears a device on the wrist much like a wristwatch and simply “writes” his or her signature in the air. The device contains accelerometers that can measure the x-, y-, and z-components of the acceleration of the device and these values are used to calculate features that are transmitted wirelessly to the host device that authenticates the signature [2]. The signature traces out a curve in 3D space. However, we are also interested in the rate at which the curve is created in the process of writing the signature in space. This speed information is expected to help make a particular signature unique. Another requirement is that the features used for the recognition must be
2. Curvature of Position and Velocity Curves A curve C in three-dimensional Euclidean space, R3, can be described by its position vector
r (t ) = ( x(t ), y (t ), z (t ) )
(1)
The element of arc, ds, of the curve C is given by
ds 2 = dx 2 + dy 2 + dz 2
(2)
The curvature of a curve C in three-dimensional Euclidean space, R3, is given by
κ ( s) = where
dT ds
(3)
dr ds
(4)
T( s ) =
is the unit tangent vector to the curve C at the point r(s) [3]. The curvature, κ, is a parameter that is invariant to rotations and translations of the curve, and is therefore a suitable variable from which to compute features to be used in the pattern recognition process. The curvature κ can be written in terms of the velocity vector, v(s), by noting that
v (t ) = where
dr dr ds ds = = Τ = Τv dt ds dt dt
v=
ds = v (t ) dt
curvature, κv(n), of the velocity curve is computed from the acceleration data using Eq. (9). The zero, first, and second moments of the position curvature time series are defined as
m0p = ∑ κ p (n)
(5)
m1p = (6)
m2p =
Using Eqs. (3) – (6) we can write the curvature κ as
κ=
dT 1 dv v dv = − ds v ds v ds
1 v (n) ∆v (n) − ∆v ( n ) v ( n) v(n) 2
(7)
(8)
Equation (8) defines the curvature of the 3D curve in position (configuration) space. We are also interested in how fast this curve is generated as a function of distance along the curve. If we consider the velocity, v(s), to represent a curve, Cv, in velocity space in the same way that r(s) represents the curve in configuration space, then we can calculate the curvature, κv(n), of this velocity curve from
κ v ( n) ≈
1 a( n) ∆a(n) − ∆a ( n ) a ( n) a ( n) 2
1 m0p
∑ nκ
1 m1p
∑n κ
p
( n)
(11)
n
2
p
( n)
(12)
n
Similarly, the zero, first, and second moments of the velocity curvature time series are defined as
Acceleration data ax, ay, and az are collected at discrete intervals, n∆t. The acceleration data are first normalized by subtracting the mean acceleration of each component from the raw data. The normalized acceleration data are then integrated (added) to produce the velocity data. Consecutive samples of the velocity data are used to calculate values of ∆v(n) and ∆v(n). Using Eq. (7) and setting ∆t = 1 so that ∆s = v, we then approximate the position curvature κp(n) from
κ p (n) ≈
(10)
n
(9)
3. Curvature Moments and Classification The curvature, κp(n), of the position curve is computed from the velocity data using Eq. (8) and the
m0v = ∑ κ v (n)
(13)
n
m1v = m2v =
1 m0v
∑ nκ
1 m1v
∑ n κ ( n)
v
( n)
(14)
n
2
(15)
v
n
The zero moments are the areas under the curves. The first moments are the centroids of the curves. The second moments are related to the spread of the curvature traces. Acceleration data are collected every 10 milliseconds as long as the person is writing the signature. That is, the system senses when one starts the signature and ends it. Thus the number of samples collected, and therefore the centroid, is a measure of the length of the signature. Others have found that the second moment can be useful in characterizing a time series [4]. All six moments provide useful information that may be unique to a particular signature. We therefore choose the zero, first and second moments of both the velocity and position curvature traces as the features used for classification. Thus, the feature vector is taken to be
f = m0v
m1v
m2v
m0p
m1p
m2p
T
(16)
To train the system a user would write his or her signature in the air many times and the feature vector given in Eq. (16) would be computed for each sample. The six mean values of each feature together with the 21 unique elements of the covariance matrix would be saved and would characterize that person. These 27 values
Position Kappa 0.016
0.014
0.012
0.01
curvature
could be stored in the wrist device and transmitted to the recognition host each time identification is required. This would alleviate the need to store these template values for all individuals in the recognition host. When recognition is required the acceleration data from the signature would be transmitted to the host, converted to a feature vector, and the Mahalanobis distance to the template data computed. If this Mahalanobis distance is less than some threshold, the recognition would be positive.
0.008
0.006
0.004
0.002
0 1
4. Experimental Results
11
21
31
41
51
61
71
n
Velocity Kappa 0.7
0.6
0.5
curvature
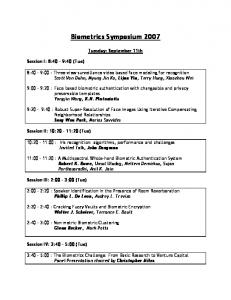
To test the use of curvature moments as features for 3D signature biometric authentication a series of experiments were undertaken. Ten different words of increasing length were written in the air ten times. These words are shown in Table 1. Typical traces for the position and velocity curvatures for the word Darrin are shown in Figures 1 and 2. For the ten samples of each word the feature vector given by Eq. (16) is calculated and then the ranges of all features are scaled to a maximum value of 100.
Figure 1 Typical position curvature trace for Darrin
0.4
0.3
0.2
0.1
Number 1 2 3 4 5 6 7 8 9 10
Table 1 Word Darrin Oakland Michigan Rochester University Connecticut NewHampshire AltanticOcean RochesterHills ChicagoIllinois
0 1
T
1 N
N
∑ (x k =1 th
− µ )( x k − µ )
T
k
31
41
51
61
71
Figure 2 Typical velocity curvature trace for Darrin
This can be seen by rotating and translating the axes to the principal axes, z, centered on the mean so that the covariance matrix can be written with only the eigenvalues, λi, on the main diagonal where λi is the variance along the ith principal axes given by
(17)
If the covariance matrix is estimated by the equation
C=
21
n
The mean vector, µ, and the covariance matrix, C, for each word are calculated and stored as the “template” representing that word. The square of the Mahalanobis distance of a sample, x, to the mean vector, µ, is given by
r 2 = ( x − µ ) C −1 ( x − µ )
11
(18)
where xk is the k sample of the N samples, then the average Mahalanobis distance of the N samples from the mean is equal to the number of features, or 6 in this case.
λi =
1 N
N
∑z k =1
2 ki
(19)
The average of the Mahalanobis distances of all samples will then be
r
2
1 = N
z k21 z 2k2 z k26 + + iii+ ∑ λ2 λ6 k =1 λ1 N
(20)
Using Eqs. (19) and (20) it follows that r
2
= 6.
Twice this value, or 12, is taken to be the threshold for a positive identification. It turns out that MATLAB uses 1/(N-1) instead of 1/N in Eq. (19) when computing the Mahalanobis distance using their mahal(x,y) function. This means that for 10 samples the average in Eq.
(20) will compute to 5.4 instead of 6. For larger values of N the MATLAB calculation will approach 6 and we will always take 12 as the recognition threshold. As an example of using this method two different persons wrote each of the ten words in the air in an attempt to be recognized. The resulting Mahalanobis distances are shown in Table 2. Inasmuch as they are all above the threshold of 12 they would all be rejected. Table 2 Mahalanobis distances of two imposters Word
Imposter 1
Imposter 2
1
44.6
10293.2
2
288.0
88989.0
3
93.8
146.0
4
92.4
19033.6
5
42.3
53899.9
6
24.1
46039.8
7
31.4
182.3
8
17.2
14512.0
9
63.2
1400.3
10
31.1
178.7
5. Conclusions This paper has described the use of curvature moments for a new biometric authentication method that uses accelerometers in conjunction with a ZigBee wireless system in which a user simply “writes” his or her signature in the air. The system has many potential advantages over current authentication systems. Conventional signature readers can be forged by those who can practice the subject’s signature. Fingerprinting is very secure, but can be time consuming, messy, and uncomfortable for the user. Retinal scanners are also very secure but come at a high cost. The use of curvature moments provides features that are independent of the orientation of the three accelerometers and capture unique attributes of a particular signature. The system is very secure because a user need not write his or her name but could use any words as a password. The password need not even be a word but could be some type of picture that only the user would know. For increased security, each bracelet could have an ID, which is very similar to a MAC address used by computers. This means that only your bracelet can be used for your signature, and no one else can try to authenticate your name with a different bracelet.
Curvature moments could be useful in any application in which accelerometers are attached to objects that trace out curves in 3D space.
References [1] Kung, S. Y., Mak, M. W., and Lin, S. H., Biometric Authentication, Prentice Hall, 2005. [2] Richard Haskell, Eric McGrath, and Kevin Van Sickle, “WIPES: Wireless Identification of Persons using Ethereal Signatures,” Third Honor, Freescale Wireless Design Challenge, April 2005, www.freescale.com/wirelesschallenge. [3] Erwin Kreyszig, Differential Geometry, Dover Publications, Inc., New York, 1991. [4] D. Toshniwal and R. C. Joshi, “Finding Similarity in Time Series Data by Method of Time Weighted Moments,” 16th Australasian Database Conference (ADC 2005), University of Newcastle, Newcastle, Australia; in Conferences in Research and Practice in Information Technology, Vol. 39, pp. 155-164, H.E. Williams and G. Boffie, Eds., 2005.