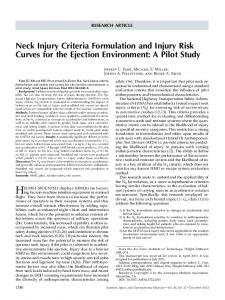
AR. TICLE. A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations. ElQuliti and Mohamed. Fig. 1. The solar radiation details of Saudi Arabia.
Copyright © 2016 American Scientific Publishers All rights reserved Printed in the United States of America
Journal of Computational and Theoretical Nanoscience Vol. 13, 7909–7921, 2016
Said Ali Hassan ElQuliti1 and Ali Wagdy Mohamed2� ∗ 1
Industrial Engineering Department, Faculty of Engineering, King Abdulaziz University, P. O. Box 80203, Jeddah 21589, Saudi Arabia 2 Operations Research Department, Institute of Statistical Studies and Research, Cairo University, Giza 12613, Egypt Solar energy is considered one of the important sources for new and renewable energy; all countries are seeking to take advantage of these sources in various fields. Saudi Arabia enjoy a privileged position compared to all the countries in the world for the length of the brightness of the sun as well as the degree of emitted radiation throughout the whole year and in all different seasons, particularly in the western region of the Kingdom. The choice of the appropriate sites to build solar power plants is a necessary aspect, the right place should enjoy several properties that differ in its priority such as: the land space currently available and its expansions in the future, the intensity of solar radiation, total costs, distance to the National network of electric power, the distance to the nearest source of water, the distance to the nearest residential city, and the type of access road to the place. To assess the places that are selected and ranked according to the degree of suitability for the establishment of solar power plants with regard to the properties that characterize these places. A Large-Scale Nonlinear Mixed-Binary Goal Programming Model (LSNLMBGPM) will be designed to express the problem and arrange places that are selected according to the degree of suitability. In this paper, an improved real-binary Differential Evolution (DE) algorithm for solving constrained optimization, named IRBDE, is developed to solve the proposed non-linear integer GP problem with binary and real variables. The proposed algorithm introduces a new search mutation to improve both the local search tendency and the global exploration capability, and to accelerate the convergence of DE technique. Moreover, to deal with binary variables, a new binary mutation rule is introduced. Besides, adaptive crossover rate and randomized scale factors will be introduced as uniformly random numbers to enhance the population diversity.
Keywords: Large-Scale, Nonlinear, Mixed-Binary Model, Goal Programming, Locations for Solar Energy Stations, An Improved Real-Binary Differential Evolution Algorithm.
1. INTRODUCTION Fossil fuels proved to be the top forms of energy used for economic development and technological advances for hundreds of years. The development relies heavily on these sources. However, the huge lack of these traditional sources demands for alternative forms of energy. Saudi Arabia is renowned for good climate and high amounts of sunshine, some specific locations are ideal for solar power system and are evaluated better than other sites. Figure 1 shows that Western and Southern regions have the highest annual rate of solar radiation in Saudi ∗
Author to whom correspondence should be addressed.
J. Comput. Theor. Nanosci. 2016, Vol. 13, No. 11
Arabia.1 It is a vital task to assess the different candidate sites for plants in the region. 1.1. Statement of the Problem Solar energy is one of the important sources for renewable energy; Saudi Arabia enjoys a pioneer position in the world for the length of the brightness and the degree of radiation throughout the whole year, particularly in the Western Region of the Kingdom. The appropriate sites chosen to build solar power plants should enjoy several properties that differ in its priority such as: the land space currently available and its expansions in the future, the intensity of solar radiation, total
1546-1955/2016/13/7909/013
doi:10.1166/jctn.2016.5791
7909
RESEARCH ARTICLE
A Large-Scale Nonlinear Mixed-Binary Goal Programming Model to Assess Candidate Locations for Solar Energy Stations: An Improved Real-Binary Differential Evolution Algorithm with a Case Study
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
ElQuliti and Mohamed
RESEARCH ARTICLE
task. The proposed algorithm introduces new two mutation schemes to handle both real and binary variables, scaling factors and crossover probability rule. 3. Design software for solving the LSNLMBGPM using the new version of Evolutionary Algorithm and to perform desired experimental study to prove that the proposed EA can balance the global exploration and the local exploitation capabilities through the search process.
Fig. 1. The solar radiation details of Saudi Arabia.
costs, distance to the National network of electric power, the distance to the nearest source of water, the distance to the nearest residential city, and the type of access road to the place. Various scientific studies are performed to evaluate the feasibility of various sites for solar power stations in different countries based subjectively on judgment and without testing its complete feasibility from all points of view. None of these references consider the design of a mathematical model that choose the best place objectively based on mathematical evaluation of available candidates. To assess the candidate sites and to rank them according to the degree of exhaustive suitability, a Large-Scale Nonlinear Binary Goal Programming Model (LSNLBGPM) will be designed to express the problem and arrange places so that to maximize the degree of suitability. Due to the existence of a non-linear constraints and numerous amount of binary and real variables in the proposed goal programming (GP) model which is not as simple as the linear GP model with binary and real variables, an improved binaryreal version of Differential Evolution algorithm is introduced to solve the proposed non-linear integer GP problem with binary and real variables. 1.2. Research Objectives The contributions and objectives of this research can be summarized as follows: 1. Develop the proposed a Large-Scale Nonlinear MixedBinary Goal Programming Model (LSNLMBGPM) to rank the candidate sites for establishing solar energy stations according to the feasibility for establishing the solar power station in the most appropriate places in the Western region of Saudi Arabia. 2. Introduce a new version of Evolutionary Algorithm (EA) as promising solver for the considered problems to achieve near-optimal solutions quickly and to solve combinatorial optimization which is considered as a challenging 7910
1.3. Research Methodology 1. Propose the criteria for assessing different places for establishing solar energy stations in the Kingdom of Saudi Arabia. 2. Collect data about different sites in the Western Region of Saudi Arabia for establishing solar energy stations. 3. Design the decision variables and different constraints, objectives and goals to describe the framework of the problem. 4. Design a proposed LSNLMBGPM to mimic the practical problem. 6. Develop a proposed conventional Evolutionary Algorithm (EA) framework and the source code using MATLAB software. The source code will also include the benchmark problems and subroutine to perform experimental analysis. 7. Design computer software for solving the LSNLBGPM using an improved binary differential evolution algorithm. 8. Solve the proposed LSNLMBGPM using the evolutionary algorithm, and discuss the results. 9. Investigate the effectiveness and benefits of the new suggested modifications by different experiments using SPSS statistical software and other statistical packages.
2. LITERATURE REVIEW Various scientific studies are performed to evaluate the feasibility of various sites for solar power stations in different countries in the world. Some of these studies consider sites that are predetermined in advance without testing its feasibility. For examples: Solar Photovoltaics at the Stringfellow Superfund Site in Riverside, California,2 a clean energy standard for the University of California is performed,3 A project located in the Australian Capital Territory (ACT).4 Some energy sources for localized use by the consumer in Ithaca, New York,5 the Refuse Hideaway Landfill for the State of Wisconsin,6 a solar energy project located near the town of Center in Saguache County, Colorado.,7 and a wind and solar energy resources at the Kenaitze Indian Tribe.8 Another type of studies like that done in New Jersey is performed to choose a site in a predetermined location.9 A third type of studies is performed to assess the feasibility of alternative locations without making prioritization like that done in Puerto Rico over 30 landfills, with some screening criteria.10 A fourth type of studies uses the Pass/Fail testing for candidate sites like in San Carlos, Arizona that considered 8 criteria for J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
ElQuliti and Mohamed
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
3. STAGES OF THE SOLUTION ALGORITHM A five-stages process is used to identify the suitable sites for the project. These stages are summarized in Table I. 3.1. First Stage: Problem Definition The main task of this paper is to determine the best candidate site for establishing a solar power plant in a specific region. The choice is based on satisfying some chosen criteria. The main criteria for the selection according to the expert’s opinion are as follows: 1. Solar Radiation: The annual rate of solar radiation (kWh/m2 /d) is a key decision criterion for determining the appropriate sites. This criterion is initially used to shorten the list of selected sites. 2. Availability of Land Area: It is the availability of suitable land area (m2 � for the project and for the future J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
Table I. Site selection stages and candidate sites. Stages
Criteria for selection
Stage 1: Problem definition. To determine the best candidate site for establishing a solar power plant satisfying some chosen criteria for evaluation. Stage 2: Determine all Near to a main city in the western region candidate sites. of Saudi Arabia (for better logistics and services). Stage 3: Scanning with google earth program, reconnaissance and site visits.
—Availability of minimum land area. —Size and room for growth. —Land slope. —Town planning and government investment policy. —Natural and physical characteristics. —Climatic conditions and —Environmental and socio-economic impact. —Legal aspects.
Stage 4: Formulation of the (i) Evaluation of site area. mathematical model. (ii) Intensity of solar radiation. Stage 5: Solution of the (iii) Distance to the main transmission line. mathematical model. (iv) Approaching water sources. (v) Approaching urban environment. (vi) Total costs.
expansion. The following equation can be used to find the minimum required area for a power solar thermal power plant.24 A = �PC/H� ∗ f A: PC: H: f:
the solar power plant area, km2 , Plant Capacity (W), Solar irradiation = 6 kWh/m2 /day = 6 ∗�1000/24� = 250 W/m2 , Factor assumed for other buildings = 25%.
A = �1000� 000� 000/250� ∗ 1�25 = 5,000,000 m2 . The solar thermal power plant land area for a plant capacity of 1,000, 000,000 W is equal to 5,000,000 m2 . For the solar photovoltaic power plant, the land area is calculated using the RETScreen program25 to be 10,256,411 m2 . 3. Size and Room for Growth: In this context, we ask the question whether the site have a future flexibility for expansion. The technical specifications assume that the minimum land area can be considered 40,000,000 m2 in order to be suitable for the future expansion.26 4. Cost of Land: It is the cost of the land ($/m2 � including construction and utility costs. 5. Construction Issues: Includes costs of building for establishing of the solar power plant and all other needed facilities, these costs are added to the cost of land. 6. Urban Environment: We ask whether the site in a location that allows users (staff, workers, visitors) to benefit from the surrounding urban environment, particularly in regard to retail outlets and private and public facilities etc. This is evaluated by considering the distance from the candidate site to the nearest city. 7911
RESEARCH ARTICLE
comparison.11 A fifth type of studies uses the economic assessment for candidate sites in some chosen areas, The economic parameters are: system cost, annual cost savings, annual O&M, payback period, system size, annual output, and jobs created as the study performed in the City of St. Marks where two sites were considered.12 A sixth type of studies is based on assessing using radiation criterion only like the study to assess solar energy feasibility at four sites in Ethiopia13 and the study done to identify renewable energy sources and their locations on the Pueblo of Laguna, New Mexico.14 A seventh type of studies uses the criteria assessment using judgment, in this type of studies, the decision is based using expert’s judgment without any quantitative approaches like the feasibility study for solar plant in New Mexico where assessing of seven candidate sites was performed,15 the study in Spier Estate in the Western Cape Province of South Africa to study the economic and technical feasibility of a solar power plant16 and the study in Western North America, where a geographic information systems (GIS) analysis was performed to identify candidate areas.17 The eighth and last type of studies is to use qualitative and cost based quantitative assessment like the study of site selection process in Australia that consists of three main stages to assess five areas18 and the feasibility study of renewable energy on brown-field sites in Nitro, West Virginia,19 also a decision support system as an empirical study that integrates the qualitative and quantitative variables was performed for assessing solar plant locations in Thailand using fuzzy analytic hierarchical process and the technique for order preference by similarity to ideal solution,20 a last example is the assessment of priority of different regions for solar projects in Iran using a hybrid multi-criteria decision making approach taking into considerations various social, technical, environmental, economic, and risk criteria to prioritize 25 cities, the Step-wise Weight Assessment Ratio Analysis method and the Weighted Aggregates Sum Product Assessment were applied to prioritize the candidate cities.21
RESEARCH ARTICLE
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
7. Distance to the Transmission Line: The distance to the transmission line (km) will be specified and used as a criterion for assessing of different sites. This distance will affect the amount of energy losses and the cost of construction. 8. Availability of a Water Source: The availability of a water source or the distance to the nearest water source is considered. In the Western region of Saudi Arabia the main water resources is the Red Sea. Water acquisition costs are extremely site-related, estimates of this cost is scaled relative to the distance of the site to the water source. 9. Access Roads: The type of the access roads to the site will be considered as a criterion for evaluation. 10. Environmental and Socio-Economic Impacts: The environmental and social impact of erecting and operating the project plant should be assessed. However, the solar power plant project is suitable from environmental and socio-economic point of view in all the selected places in the western region. 11. Natural and Physical Characteristics: It is the natural characteristics of the various places for the project. It includes soil conditions, subsoil water levels, land slope (grade), flora, fauna and rocks and site hazards, like earthquakes and susceptibility to flooding extending over a great area. 12. Climatic Conditions: Climatic conditions can be specified in terms of the amounts of rainfall, air temperature, humidity, sunshine hours, winds, precipitation, hurricane risk etc. Each of these can be specified in greater details, such as maximum, minimum and average. 13. Town Planning and Investment Policy of the Government: The establishment of the project in the Kingdom is encouraged by the government. 14. Legal Aspects: The legal regulations and procedures applicable for alternative locations should be studied carefully. The various national or local authorities responsible for power and water supplies, building regulations, fiscal aspects, security needs etc. are contacted for legal permissions. At present, Saudi Electricity and Co-generation Regulatory Authority (ECRA) has announced general objectives for the development of renewable energy in the Kingdom, including improving the diversification of energy supplies, facilitating the supply of energy to remote areas, developing in-Kingdom knowhow and jobs and putting in place a supportive regulatory framework for investment.
ElQuliti and Mohamed
the future expansion (5,000,000 m2 for CSP 10,256,411 m2 for PV and 40,000,000 m2 for future expansion). The Google Earth program determines the area of each available land and its longitude and altitude as shown in Figure 2. 3.4. Fourth Stage: Formulation of the Mathematical Model 3.4.1. Decision and Deviation Variables Let: xj be a binary variable that denotes a candidate site j, j = 1� 2� 3� � � �� n. Where: n = Number of candidate sites in the problem, xj = 1 means that site j will be chosen, xj = 0 means that site j will not be chosen. Let: dji+ be an overachievement deviation variable and let dji− be an underachievement deviation variable that will be subtracted or added respectively to a constraint corresponding to a decision variable j� j = 1� 2� � � � � n and a criterion i� i = 1� 2� � � � � m, where m = number of criteria chosen for evaluation. The deviation variables represent any unfavorable violations from an optimal desired value for each of the considered criterion. All the deviation variables will be minimized with a proper weight in the objective function to determine the optimal solution as will be explained in the objective function section. 3.4.2. Problem Constraints (i) Assessment of Site Area: The assessment of the available land area will be carried out in two steps as follows: (a) Pass/Fail Test: The land area for a suitable site should not be less than a specified value amin to be sufficient for generating the required solar energy and for future expansion. Accordingly, any site having area less than amin is
3.2. Second Stage: Determining all Candidate Sites In this stage, all the available free lands near to the main cities in a chosen region are determined. 3.3. Third Stage: Scanning with Google Earth Program In this stage, the Google Earth program is used to confirm the availability of suitable land area for the project and for 7912
Fig. 2. Google earth program.
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
ElQuliti and Mohamed
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
amin · xj − aj ≤ xj �
j = 1� 2� 3� � � �� n
Where: aj = available area of site j. If aj ≥ amin , then xj may take either 1 or 0 values without violating the constraint, while the objective function value will determine the preferred value. But, if aj < amin , then xj is forced to take the value of 0 and the corresponding site is considered unsuitable and deleted from the list. For the sake of simplicity this process will be carried out by comparing each aj with amin , and the site list is shortened by deleting any unsuitable site. (b) Evaluation of Site Area: Let amax be the maximum available area in all possible candidate sites: amax = max�aj � j = 1� 2� 3� � � �� n� Then a preference for a given site j will be represented by adding an appropriate underachievement deviation variable dj1− representing the difference between amax and aj for each site j as follows: aj · xj + dj1− ≥ amax �
j = 1� 2� 3� � � �� n
All the deviation variables in the model dji will be minimized with a proper weight w i (for all candidate sites j� in the objective function to prioritize various candidate sites. In the optimal solution dji will have a nonnegative value relative to the difference between the value of a criterion i and the best one. (ii) Intensity of Solar Radiation: Let: hj be the solar radiation intensity in kWh/m2 at site j, j = 1� 2� 3� � � �� n. hmax = max�hj � j = 1� 2� 3� � � �� n� Then a preference for a given site j will be represented by adding an appropriate underachievement deviation variable dj2− representing the difference between amax and aj for each site j as follows: hj · xj + dj2− ≥ hmax �
j = 1� 2� 3� � � �� n
Like in the previous case: dj2− will have a nonnegative value relative to the difference between amax and aj in the optimal solution. (iii) Distance to the Main Transmission Line: Let: tj be the distance of site j in km to the main electric transmission line, j = 1� 2� 3� � � �� n. tmin = min�tj � j = 1� 2� 3� � � �� n� Then a preference for a given site j will be represented by adding an appropriate overachievement deviation J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
variable dj3− representing the difference between tj and tmin for each site j as follows: tj · xj − dj3+ ≤ tmin �
j = 1� 2� 3� � � � � n
(iv) Approaching Water Sources: Let: sj be the distance of site j in km to the nearest source of water, j = 1� 2� 3� � � �� n. smin = min�sj � j = 1� 2� 3� � � �� n� Then a preference for a given site j will be represented by adding an appropriate overachievement deviation variable dj4− representing the difference between sj and smin for each site j as follows: sj · xj − dj4+ ≤ smin �
j = 1� 2� 3� � � �� n
(v) Approaching Urban Environment: Let: uj be the distance of site j in km to the nearest urban environment, j = 1� 2� 3� � � �� n. umin = min�wj � j = 1� 2� 3� � � � � n� Then a preference for a given site j will be represented by adding an appropriate overachievement deviation variable dj5− representing the difference between uj and umin for each site j as follows: uj · xj − dj5+ ≤ umin �
j = 1� 2� 3� � � �� n
(vi) Total Costs: Let: cj be the total cost ($) of land ($/m2 �, establishing and operating a solar power station at site j, j = 1� 2� 3� � � �� n. Since the cost of establishing and operating a solar power station is approximately the same for all sites, then cj will be limited to the cost of land. cmin = min�cj � j = 1� 2� 3� � � �� n� Then a preference for a given site j will be represented by adding an appropriate overachievement deviation variable dj6− representing the difference between cj and cmin for each site j as follows: �aj · cj � · xj − dj6+ ≤ min�aj · cj �� j
j = 1� 2� 3� � � �� n
(vii) Required Number of Sites: Since we need to determine the optimal candidate site with the highest preference, an additional constraint will to be added: n � xj = 1 j=1
7913
RESEARCH ARTICLE
considered unsuitable and should be deleted from the proposed list of candidate sites. This pass/fail test can be expressed mathematically as follows:
RESEARCH ARTICLE
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
3.4.3. Objective Function of the Problem The objective function is designed so as to choose the best candidate sites that minimize the total overachievement and underachievement deviation variables: �� � m n � � � i i Minimize z = xj � � � w · dj j=1
i=1
Where w i represent the relative weight of criterion i, i = 1� 2� � � � � m, they will be calculated as the excess cost for violating an overachievement (underachievement) deviation variable d i+ (d i− � from that of the minimum (maximum) value for the best cite with respect to criterion i as follows: (i) Evaluation of Site Area: w 1 = cost of producing solar electric power from a unit area of 1 km2 for needed expansion for 10 years after operating the initial solar power station for 10 years (assuming a service life of 20 years for the whole project). (ii) Intensity of Solar Radiation: w 2 = cost of producing solar electric power from intensity of solar radiation of 1 kWh/m2 for a time period of 20 years. (iii) Distance to the Main Transmission Line: w 3 = cost of loosed generated electric power when transmitted for 1 km during 20 years. (iv) Approaching Water Source: w 4 = cost of reaching a water source at a distance of 1 km from a candidate site during 20 years. (v) Approaching Urban Environment: w 5 = cost of reaching an urban environment at a distance of 1 km from a specific site for 20 years. (vi) Total Costs: w 6 = 1, since the corresponding overachievement deviation variable is the total cost of establishing a solar power station and its operation for 20 years.
The first step is to search for all the available free lands near to the main cities in the Western rejoin of Saudi Arabia. Table II shows the coordinates of the 22 sites in the western region and the available land area. From the table it is clear that 18 sites are suitable for the project required area and for the future expansion. “Taimaa” has an area of 20 km2 which is not suitable for future expansion. “Turubah” has an area of 8 km2 which is suitable only for CSP power plant and not suitable for PV power plant or for the future expansion. “Khaibar” and “Makkah” are less than 5 km2 which is not suitable to be considered. 4.1. Model Constraints Applying the mathematical model for the case study with 18 candidate sites, the following mathematical model will be obtained: (i) Evaluation of Site Area:
7914
j = 1� 2� 3� � � �� 18
Table II.
The candidate sites and their characteristics. Available Transmission land Radiation h line, urban area km2 (kWh/m2 ) and water (km)
No.
Site j
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Hakl Tabuk Alqalibah Thiba Al-Ula Alwajh Omlog Henakia Almadina Yanbu MahdAlthahab Rabigh Thowal Khulais Alkhormah Taif Jeddah Raniah
48 85 60 77 73 51 60 54 58 60 68 75 63 50 83 81 100 49
19
Taimaa
20
20 21 22
Turubah Khaibar Makkah Weight wi ($)
Maximum Maximum 5.65 5.84 5.90 6.43 6.03 6.23 5.93 5.89 6.36 5.90 6.00 6.04 6.04 6.04 5.97 5.95 5.99 5.97
Cost of land $/m2
Minimum
Minimum
3.2 4.0 2.7 3.0 2.9 3.0 3.5 3.4 3.0 2.9 3.9 4.2 3.7 4.1 3.8 3.2 2.5 2.7
95 110 75 50 85 25 45 65 120 100 85 90 70 95 85 150 200 120
They are deleted in the third stage of the solution algorithm
8 3 3 400
2000
1000
1
(ii) Intensity of Solar Radiation: hj · xj + dj2− ≥ hmax �
j = 1� 2� 3� � � �� 18 (19-36)
(iii) Distance to the Main Transmission Line, Water sources and Urban environment: �tj + sj + uj � · xj − dj3+ ≤ �tmin + smin + umin ��
4. A CASE STUDY: THE WESTERN REGION IN SAUDI ARABIA
aj · xj + dj1− ≥ amax �
ElQuliti and Mohamed
(1-18)
j = 1� 2� 3� � � �� 18
(37-54)
(iv) Total Costs: �aj · cj � · xj − dj4+ ≤ minj �aj · cj �� j = 1� 2� 3� � � �� 18
(55-72)
(v) Determining the Optimal Candidate Site: 18 �
xj = 1
(73)
j=1
4.2. Objective Function of the Problem The objective function is designed so as to choose the best candidate sites that minimize the total overachievement and underachievement deviation variables: � 4 �� 18 � � � i i w · dj xj · (74) Minimize z = j=1
i=1
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
ElQuliti and Mohamed
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
5. IMPROVED REAL-BINARY DIFFERENTIAL EVOLUTION ALGORITHM
5.1. Problem Formulation and Constraint Handling In general, constrained optimization problem can be expressed as follows (without loss of generality minimization is considered here22 ): Minimize f �x�� � x� = �x1 � x2 � � � � � xn � ∈ �n
(75)
Subject to: � ≤ 0� gj �x�
j = 1� � � � � q
(76)
hj �x� � = 0�
j = q + 1� � � � � m
(77)
Where: x� ∈ � ⊆ S, � is the feasible region, and S is an n-dimensional rectangular space in �n defined by the parametric constraints li ≤ xi ≤ ui , 1 ≤ i ≤ n where li and ui are lower and upper bounds for a decision variable xi , respectively. For an inequality constraint that sat� = 0 �j ∈ 1� � � � � q� at any point x� ∈ �, we isfies gj �x� � �j = say it is active at x. � All equality constraints hj �x� q + 1� � � � � m� are considered active at all points of �. Most constraint-handling approaches used with EAs tend to deal only with inequality constraints. Therefore equality constraints are transformed into inequality constraints of � − ≤ 0 where is the tolerance allowed the form hj �x� (a very small value). In order to handle constraints, we use Deb’s constraint handling procedure. Deb23 proposed a new efficient feasibility-based rule to handle constraint for genetic algorithm where pair-wise solutions are compared using the following criteria: • Between two feasible solutions, the one with the highest fitness values wins. • If one solution is feasible and the other one is infeasible, the feasible solution wins. • If both solutions are infeasible, the one with the lowest sum of constraint violation is preferred. As a result, Deb23 has introduced the superiority of feasible solutions selection procedure based on the idea that any individual in a constrained search space must first comply with the constraints and then with the objective function. Practically, Deb’s selection criterion does not need to finetune any parameter. Typically, from the problem formulation above, there are m constraints and hence the amount J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
If a decision vector or an individual x� satisfies the jth constraint, cvj �x� � is set to zero, it is greater than zero. As discussed,24 in order to consider all the constraints at the same time or to treat each constraint equally, each constraint violation is then normalized by dividing it by the largest violation of that constraint in the population. Thus, the maximum violation of each constraint in the population is given by j cvmax = max cvj �x� � x∈s �
(79)
These maximum constraint violation values are used to normalize each constraint violation. The normalized constraint violations are added together to produce a scalar constraint violation cv�x� � for that individual which takes a value between 0 and 1 cv�x� � =
m cvj �x� � 1� j m j=1 cvmax
(80)
5.2. Differential Evolution (DE) Differential Evolution (DE) is a stochastic populationbased search method, proposed by Storn and Price.25 DE is relatively recent EAs for solving real-parameter optimization problems.26 DE has many advantages including simplicity of implementation, reliability, robustness, and in general is considered as an effective global optimization algorithm.27 In this paper, it is used the scheme which can be classified using the notation as DE/rand/1/bin strategy.27 This strategy is the most often used in practice. A set of D optimization parameters is called an individual, which is represented by a D-dimensional parameter vector. A population consists of NP parameter vectors xiG , i = 1� 2� � � �� NP . G denotes one generation. NP is the number of members in a population. It does not change during the process. The initial population is chosen randomly with uniform distribution in the search space. DE has three operators: mutation, crossover and selection. The crucial idea behind DE is a scheme for generating trial vectors. Mutation and crossover operators are used to generate trial vectors, and the selection operator then determines which of the vectors will survive into the next generation.28 Differential Evolution DE has been receiving great attention and has also been successfully applied in many research fields in the last decade.28–34 7915
RESEARCH ARTICLE
Due to the existence of a non-linear constraints and numerous amount of real and binary variables in the proposed goal programming model which is not as simple as the linear GP model with continuous variables, an improved real-binary Differential Evolution algorithm for solving constrained optimization, named IRBDE, is proposed to solve the proposed non-linear GP problem with real and binary variables. Thus, in this section, the problem formulation and constraint-handling technique, IRBDE algorithm and handling of binary variables used in this research are described.
of constraint violation for an individual is represented by a vector of m dimensions. Using a tolerance ( � allowed for equality constraints, the constraint violation of a decision vector or an individual x� on the jth constraint is calculated by ⎧ ⎨max�0� gj �x��� � j = 1� � � � � q (78) � = cvj �x� ⎩ max�0� hj �x� � − �� j = q + 1� � � � � m
RESEARCH ARTICLE
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
5.2.1. Initialization In order to establish a starting point for the optimization process, an initial population must be created. Typically, each decision parameter in every vector of the initial population is assigned a randomly chosen value from the boundary constraints: xij0 = lj + randj ∗ �uj − lj �
(81)
Where: randj denotes a uniformly distributed number between 0� 1�, generating a new value for each decision parameter. li and ui are the lower and upper bounds for the jth decision parameter, respectively.25 5.2.2. Mutation For each target vector xiG , a mutant vector v is generated according to the following: viG+1 = xrG1 + F ∗ �xrG2 − xrG3 ��
r1 = r2 = r3 = i
(82)
With randomly chosen indices and r1 � r2 � r3 ∈ �1� 2� � � � � NP �� Note that these indices have to be different from each other and from the running index i so that NP must be at least four. F is a real number to control the amplification of the difference vector �xrG2 − xrG3 �. According to Ref. [26], the range of F is in 0� 2�. If a component of a mutant vector goes off the search space i.e., if a component of a mutant vector violate the boundary constraints, then the new value of this component is generated using (81). 5.2.3. Crossover The target vector is mixed with the mutated vector, using the following scheme, to yield the trial vector u. ⎧ ⎨vijG+1 � rand�j� ≤ CR or j = randn�i� G+1 (83) uij = ⎩ G xij � rand�j� > CR and j = randn�i� Where j = 1� 2� � � � � D, rand�j� ∈ 0� 1� is the jth evaluation of a uniform random generator number. CR ∈ 0� 1� is the crossover probability constant, which has to be determined by the user. randn�i� ∈ �1� 2� � � � � D� is a randomly gets at least one chosen index which ensures that uG+1 i element from viG+1 . 5.2.4. Selection DE adopts a greedy selection strategy between the target . If the objective funcvector xiG+1 and the trial vector uG+1 i tion value of the trial vector is less than or equal to that of is set to xiG+1 . Otherwise, the the target vector, then uG+1 i target vector will enter the next generation. The selection scheme is as follows (for a minimization problem): ⎧ ⎨uG+1 � f �uG+1 � ≤ f �xiG � i i G+1 (84) xi = ⎩ G f �uG+1 � > f �xiG � xi � i 7916
ElQuliti and Mohamed
5.3. Improved Real-Binary Differential Evolution Algorithm with Novel Mutation Strategy (IRBDE) DE/rand/1 is the fundamental mutation strategy developed by Storn and Price,25� 26 and it is reported to be the most successful and widely used scheme in the literature.28 Obviously, in this strategy, the three vectors are chosen from the population at random for mutation and the base vector is then selected at random among the three. The other two vectors form the difference vector that is added to the base vector. Consequently, it is able to maintain population diversity and global search capability with no bias to any specific search direction, but it slows down the convergence speed of DE algorithms.35 Nonetheless, adjusting control parameters such as the scaling factor, the crossover rate and the population size, alongside with developing an appropriate mutation scheme and coupling with suitable and effective constraint-handling techniques can considerably improve the search capability of DE algorithms.22 Therefore, in this paper, four modifications are proposed in order to balance the exploration and exploitation of the DE algorithm and handling binary variables. 5.3.1. Novel Mutation Strategy for Real Variables From the mutation Eq. (82), it can be easily seen that in the standard DE three vectors are randomly selected to form mutation operation and the base vector is then chosen randomly among the three. Virtually, it enhances the global exploration capability of the algorithm but it slows down its convergence speed. Thus, this research proposes a new search mutation to improve both the local search tendency and the global exploration capability, and to accelerate the convergence of DE technique. The proposed mutation vector is generated in the following manner: G G G iG+1 = xworst + Fr · �xbest − xbetter �
(85)
G G G , xbetter and xworst are the tournament best, betWhere: xbest ter and worst three randomly selected vectors, respectively, Fr is the scaling factors, rand 0� 1� is a function that returns a real number between 0 and 1, and G is the current generation number, for constrained optimization problems at any generation g > 1, the tournament selection of the three randomly selected vectors follow one of the following three scenarios that may exist through generations, Without loss of generality, we only consider minimization problems: Scenario 1: If the three randomly selected vectors are feasible, then sort them in ascending according to their objective function values. Scenario 2: If the three randomly selected vectors are infeasible, then sort them in ascending order according to their constraint violations (CV) values.
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
ElQuliti and Mohamed
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
Obviously, from mutation Eq. (31), from the three random G is used as the base vector and vectors, the worst xworst the remaining two are used to yield the difference vecG G − xbetter �. This process explores the region around tor �xbest each worst vector for each mutated point which allows the new generated vector to follow the direction of the best vector among the three randomly selected vectors i.e., it reforms the direction of the worst vector by adding the G G −xbetter �. This enhances the directed difference vector �xbest exploitation feature and expedites the convergence speed as the difference vector is oriented from the better to the best vectors. Consequently, this new mutation strategy has the better local and global search abilities and it can enhance the convergence speed.
may decrease and/or the population may prematurely converge. On the other hand, small values of CR increase the possibility of stagnation and slow down the search process.22 Additionally, at the early stage of the search, the diversity of the population is large and the variance of the population is large. Hence, the CR needs to a small value in order to avoid exceeding the level of diversity and this can reduce the convergence rate. Then, after some generations, the population will become similar. In this stage, in order to advance the diversity and increase the convergence speed, the value of CR must be a large value. Therefore, based on the above analysis and discussions, and in order to balance the exploration and exploitation of the algorithm, in this paper, two non-overlap intervals combined through a linear probability scheme is proposed as follows: If�rand 0� 1� ≥ �1 − G/GEN�� Then CR = rand 0�05� 0�25�
(86)
Else CR = rand 0�75� 0�95�
5.3.2. Randomized Scale Factor Basically, the scale factor F has a vital role during the search process that controls the amplification of the difference vector between two individuals. In the original DE algorithm, the value of F is kept as a constant value. Small values of F lead to the premature convergence, and high values of F slow down the search. To our knowledge, there is no optimal value of the F that can solve all complex benchmark problems. However, from the Eqs. (82), (85), we can find that the diversity of the population will be lost as all the difference vectors are perturbed by the same scale factor. Hence, the scale factors F must set as a random variable for each trial vector so as to perturb the random base vector by different weights. Therefore, Fr is introduced as a uniform random variable within 0� 1� to G G − xbetter � for all trial vecbias the search direction of �xbest tors in the same direction with different positive values. Therefore, the new enlarger random variable can perturb the random base vector by different random weights with opposite directions. Thus, these ranges ensure both the exploitation tendency and exploration ability.22 5.3.3. Adaptive Crossover Rate The crossover operation aims to construct an offspring by mixing components of the current element and of that generated by mutation operator. The crossover rate reflects the probability with which the trail individual inherits the actual individual’s genes.27 Besides, the constant crossover (CR) practically controls the diversity of the population. Moreover, if the CR value is relatively high, this will increase the population diversity and improve the convergence speed. Nevertheless, the convergence rate J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
Where rand 0� 1� is a function that returns a real number between 0 and 1. Therefore, from Eq. (86), in order to maintain diversity of the population, at the early stage of the search as the variance of the entire population is high, the probability of generating small values is greater than the probability of generating large values. However, through the evolution process, the probability of generating large values is greater than the probability of generating small values. Consequently, through generations, both the diversity and the convergence rate are balanced. 5.3.4. Novel Mutation Strategy for Binary Variables In its canonical form, the Differential Evolution algorithm is only capable of optimizing unconstrained problems with continuous variables. However, there are very few attempts to transform the canonical DE algorithm to handle integer variables using rounding operator, where the operator round �x� rounds the elements of X to the nearest integers.36–39 In this research, In fact, it can be obviously Table III. All results of original DE operator on binary level when the value of F is 1. xr1 0 0 0 0 1 1 1 1
xr2
xr3
F
Results
0 0 1 1 0 0 1 1
0 1 0 1 0 1 0 1
1 1 1 1 1 1 1 1
0 −1 1 0 1 0 2 1
7917
RESEARCH ARTICLE
Scenario 3: If the three randomly selected vectors are mixed (feasible and infeasible), then the vectors are sorted by using the three criteria: (a) Sort feasible vectors in front of infeasible solutions (b) Sort feasible solutions according to their objective function values (c) Sort infeasible solutions according to their constraint violations.
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
RESEARCH ARTICLE
Table IV. xr1 0 0 1 1
All results of case 1 when xr2 equals xr3 .
Table VI. Parameter settings.
xr2
xr3
F
Results
0 1 0 1
0 1 0 1
1 1 1 1
0 0 1 1
seen mutation operator, from Eq. (3), that it can only keep the closing in the field of real-parameter optimization problems. Nonetheless, it cannot keep the closure when it is applied in the discrete domain. Accordingly, in order to solve discrete-parameter optimization problems, a new mutation scheme must be proposed to expand DE into discrete binary space. In the proposed binary mutation, the cross over operation and the selection operation are the same as the original DE algorithm. However, the new generation of initial population must be created by the following way xij0 = round(rand�0� 1��. The function round (rand (0, 1)) is used to generate a binary number. Really, the novel binary mutation operator is based on the original mutation of basic DE algorithm and the value of F is 1. As can be seen from mutation operation defined by Eq. (82), there are three different vectors and each one of them can take two possible values 0 or 1 in the binary space. Thus there are 23 possible results of the original DE mutation operator in binary space directly are listed in Table III. Simply, there are eight kinds of different combinations of the mutually three different vectors in the mutation operation. These eight combinations can be classified into two cases. Each case has four kinds of combinations. The results of two cases can be derived as follows. Case (1): If xr2 equals xr3 , then the result of mutation equals to xr1 . All results of case (1) are shown in Table IV. Case (2): If xr2 is different from xr3 , then the result of mutation equals to xr2 . Taking into consideration that −1 and 2 values are rounded independently to 0 and 1, respectively, as they are the nearest binary values for each value. All results of case (2) are shown in Table V. Consequently, with the above mentioned two cases, the proposed binary mutation operator is depicted as follows. ⎧ ⎨xrG1 � if xrG2 = xrG3 viG+1 = (87) ⎩ G xr2 � if xrG2 = xrG3
Table V. xr1 0 0 1 1
7918
ElQuliti and Mohamed
Control parameter
Actual values
Population size (NP) Maximum generations (GEN) Crossover rate (CR) Local scaling factor (Fr �
50 600 Using Eq. (86). Uniform random number 0� 1�
6. PROBLEM SOLUTION AND PARAMETRIC STUDY ON IRBDE 6.1. Optimal Solution The proposed mathematical model for the solar energy problem discussed in the previous sections has been tested. The experiments were carried out on an Intel Pentium core 2 due processor 2200 MHZ and 2 GB-RAM. IRBDE algorithm is coded and realized in MATLAB. The required population size NP is 50 and max generation GEN = 600. The parameter settings required for IRBDE are shown in Table VI. The best result in terms of the objective function value and the optimal decision variables is given in Table VII: x6 = 1 means that the most suitable site is number 6 which is Alwajh. 30 independent runs are performed and statistical results are provided including the best, median, mean, worst results, standard deviation and success rate are presented in Table VIII. The success rate (SR) represents the proportion of convergence to the known optimal solution, which can be used to evaluate the stability and robustness of proposed algorithm. The convergence graph corresponds to the best objective function value f �x� of the best run of the two case studies against Total Number of Function Evolutions (TNFE) of the IRBDE is shown in Figure 3. From Table VII, it can be seen that the best results obtained by IRBDE are the optimal feasible solution as the constraints are satisfied. Besides, from Table VIII, IRBDE is unable to reach the best solution consistently in all runs as the problem is very difficult as discussed previously. Actually, IRBDE reaches the optimal solution in 11 runs out of 30 runs i.e., its success rate is 0.37. However, it noteworthy to mentioning that the second and third best Design variables and the optimum solution.
Table VII. Abbreviation
Variable no.
x6 = Alwajh site z
Description
Optimum value
X6 Objective function optimum value
1 419.5
All results of case 2 when xr2 is different from xr3 . xr2
xr3
F
Results
0 1 0 1
1 0 1 0
1 1 1 1
−1 1 0 2
Table VIII.
The statistical results of IRBDE on the case study.
Best
Median
Mean
Worst
Std
Case study 419.5 25941.5 23384.5 58001.5 20578.5
Success rate (SR) 0.37
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
ElQuliti and Mohamed x 108
Best Function Value
3
2
1
0
0
0.5
1
1.5
2
2.5
3 x 104
Number of Function Evaluations Fig. 3.
Convergence graph (best curve) of IRBDE on the case study.
solutions are 14635 and 25941.5 when X7 = 1 and X4 = 1 and the remaining binary variables are zeros, respectively. Therefore, the median and mean values obtained by IRBDE are not far from the best solution which proves IRBDE sometimes convergences to local optimal solutions. Consequently, it can be concluded that IRBDE can reach the top best solutions in most cases due to the proposed modifications. Moreover, from Figure 3, it can be deduced that the optimal solution can be reached using around 25% of total number of function Evaluations which shows that IRBDE is an efficient algorithm with rapid convergence speed. Based on the above results and analysis, it can be concluded that the main benefits of the proposed modifications are the remarkable balance between the exploration capability and exploitation tendency through the optimization process that leads to superior performance with fast convergence speed and extreme robustness in solving considered non-linear integer GP with real and binary variables problems. 6.2. Parametric Study on IRBDE In this section, in order to investigate the impact of the proposed modifications, some experiments are conducted. Another different version of IRBDE algorithm has been tested and compared against the proposed one. Version 1: To investigate the impact of the proposed novel mutation strategy for real variables, DE/rand/1/bin strategy with modified parameters is used without using the proposed novel mutation strategy for real variables. (This version denotes the IRBDE-1.) Table IX. Comparison between EDECO, EDECO-1 and basic DE on the case study.
Case study
Features
IRBDE-1
IRBDE
Best Median Mean Worst Std Success rate (SR)
419�5 33354�5 43111�9 187294 36129�2 (2/30)0.07
419�5 25941�5 23384�5 58001�5 20578�5 (11/30)0.37
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
x 108 IRBDE IRBDE-1
2
1
0 0
0.5
1
1.5
2
2.5
Number of Function Evaluations
3 x 104
Fig. 4. Convergence graph (best curve) of IRBDE-1, DE and IRBDE on the case study.
In order to evaluate the final solution quality, efficiency, convergence rate, and robustness produced by these algorithms, the performances of the IRBDE and IRBDE-1 algorithms are investigated. The parameters used are fixed as same as those in previous sub-section. The overall comparison results of the IRBDE and IRBDE algorithms are summarized in Table IX. Furthermore, in order to analyze the convergence behavior of each algorithm compared, the convergence characteristics in terms of the best fitness value of the best run of each algorithm for the case study is illustrated in Figure 4. Indeed, as can be presented in Table IX, IRBDE and IRBDE-1 reaches the optimal solution. However, the median, mean, worst, standard division and success rate results provided by IRBDE are much better than those produced by IRBDE algorithm. Concretely, it can be seen that the IRBDE algorithm significantly outperforms the IRBDE-1 algorithm. Thus, it is worth mentioning that the IRBDE algorithm considerably improves the final solution quality. Therefore, it is clearly observed that the proposed novel mutation scheme considerably balances the global exploration ability and local exploitation tendency for these difficult case study with challenging characteristics much more than IRBDE-1 algorithm, Additionally, the convergence graph in Figure 4, illustrates that IRBDE algorithm converges slightly faster than IRBDE-1. It is clear that the proposed mutation plays a vital role and has a significant impact in improving the convergence speed of IRBDE algorithm for this case study. The IRBDE algorithm has a considerable ability to maintain its convergence rate, improve its diversity as well as advance its local tendency through a search process.
7. CONCLUSIONS AND POINTS FOR FUTURE RESEARCHES 7.1. Conclusions We can summarize the basic conclusions of this article in the following points; 1. The Goal Programming is used to make ranking of different sites in the Western region of Saudi Arabia in order 7919
RESEARCH ARTICLE
Best Function Value
3
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
RESEARCH ARTICLE
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations
to evaluate and choose the most suitable ones for a solar power plant. 2. A plenty of studies and researches dealt with assessment of sites for the feasibility of establishing solar power plants worldwide, but all of them concentrate solely on the feasibility based on judgment and on economic factors, none of them uses quantitative criteria as that used in Goal Programming to rank the different alternatives. 3. A process of five stages for site selection and assessment is proposed, Stage 1 is the problem definition, Stage 2 is to determine all candidate sites, Stage 3 is the scanning with Google earth program, reconnaissance and site visits, Stage 4 is the formulation of the mathematical model, and Stage 5 is the solution of the mathematical model. 4. 22 candidate sites were found in the second stage, these are short listed to 18 sites in the third stage, while the goal programming model determines the most suitable one. 5. An improved real-binary Differential Evolution algorithm for solving constrained optimization, named IRBDE, is proposed to solve the proposed non-linear integer GP problem with real and binary variables. The proposed algorithm introduces a new search mutation to improve both the local search tendency and the global exploration capability, and to accelerate the convergence of DE technique. Moreover, to deal with binary variables, a new binary mutation rule is introduced. Besides, adaptive crossover rate and randomized scale factors will be introduced as uniformly random numbers to enhance the population diversity. 7.2. Points for Future Researches The work in the present work reveals some further points for upcoming researches to the light; they are summarized in these points: 1. To use other methods for choosing the best site and to compare the obtained results. 2. To do a complete feasibility study for planting solar energy stations in the Western Region of Saudi Arabia using results obtained in this research. 3. To perform similar studies for other regions of the Kingdom of Saudi Arabia. 4. To perform similar studies for wind stations as other types of renewable energy. 5. To apply the present approach to the solution of realworld optimization problems. 6. To develop alternative adaptive version with another novel mutation schemes. Acknowledgments: This Project was funded by the Deanship of Scientific Research (DSR) at King Abdulaziz University, Jeddah, under grant No. (G/102/135/37). The authors, therefore, acknowledge with thanks DSR technical and financial support. 7920
ElQuliti and Mohamed
References 1. S. Rehmana, M. A. Badera, and S. A. Al-Moallemb, Cost of solar energy generated using PV panels, Renewable and Sustainable Energy Reviews, Elsevier, Amsterdam (2007), Vol. 11, pp. 1843– 1857. 2. O. VanGeet and G. Mosey, Feasibility Study of Economics and Performance of Solar Photovoltaics at the Stringfellow Superfund Site in Riverside-California, Technical Report, Environmental Protection Agency for the RE-Powering America’s Land Initiative: Siting Renewable Energy on Potentially Contaminated Land and Mine Sites (2010). 3. M. Munn, Feasibility study for a clean energy standard for the University of California, Office of the President, Energy and Utility Services (2002). 4. Parsons Brinckerhoff Australia Pty Limited, Solar Power Plant Prefeasibility Study, Actew AGL and ACT Government, Brisbane, Australia (2008). 5. A. Lund-Hansen, Feasibility study of renewable energy sources at the Emerson plant in Ithaca, Cornell University College of Engineering, NY (2011). 6. J. Salasovich and G. Mosey, Feasibility study of economics and performance of solar photovoltaics at the Refuse Hideaway Landfill in Middleton-Wisconsin, Environmental Protection Agency for the REPowering America’s Land Initiative: Siting Renewable Energy on Potentially Contaminated Land and Mine Sites, U.S. Department of Energy, Office of Energy Efficiency and Renewable Energy, Alliance for Sustainable Energy, LLC., Technical Report (2011). 7. M. Ninyo, Geotechnical and Environmental Sciences Consultants, Geotechnical feasibility study, Saguache solar energy project, Saguache County, Colorado, Project No. 500316001 (2011). 8. B. Trefon, Kenaitze Indian Tribe Wind and Solar Feasibility Study, Tribal Environmental Program, Final Renewable Energy Feasibility Report, US Department of Energy, Golden Field Office, Kenai, Alaska, US (2006). 9. J. Edward (ed.), Rutgers University, Milford Renewable Energy Feasibility Study, Bloustein School of Planning and Public Policy, Renewable Energy Studio, New Jersey (2010). 10. J. Salasovich and G. Mose, Feasibility study of solar photovoltaics on landfills in Puerto Rico, Technical Report, U.S. Department of Energy Office of Energy Efficiency and Renewable Energy, Weatherization and Intergovernmental Program, Alliance for Sustainable Energy, LLC. Puerto Rico Environmental Quality Board (2011). 11. US Department of Energy, Tribal Energy Program San Carlos Apache Tribe, Energy Organization Analysis and Solar Feasibility Study, San Carlos, Arizona, US (2012). 12. L. Lisell and G. Mosey, Feasibility study of economics and performance of solar photovoltaics at the Former St. Marks Refinery in St. Marks, Florida, Technical Report, National Renewable Energy Laboratory, Colorado (2010). 13. G. Bekele, Study into the potential and feasibility of a standalone solar-wind hybrid electric energy supply system for application in Ethiopia, Doctoral Thesis, Division of Applied Thermodynamics and Refrigeration, Department of Energy Technology, School of Industrial Engineering and Management, Royal Institute of Technology KTH, Stockholm (2009). 14. C. Stewart, Renewable Energy Feasibility Study, Pueblo of Laguna Utility Authority, Red Mountain Tribal Energy, Final Report, New Mexico, USA (2008). 15. V. Black, Building a World of Difference, New Mexico Energy, Minerals and Natural Resources Department, New Mexico concentrating solar plant feasibility study, Draft Final Report (2005). 16. M. Lubkoll, A. C. Brent, and P. Gauché, A pre-feasibility study of a concentrating solar power system to offset electricity consumption at the Spier, South Africa (2011). 17. Western Governors’ Association, Clean and Diversified Energy Initiative, Solar Task Force Report, USA (2005).
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
ElQuliti and Mohamed
A LSNLMBGPM to Assess Candidate Locations for Solar Energy Stations 30. A. W. Mohamed, H. Z. Sabry, and T. Abd-Elaziz, Egyptian Informatics Journal 14, 37 (2013). 31. A. W. Mohamed, Computers and Industrial Engineering 85, 359 (2015). 32. J. Brest, S. Greiner, B. Boskovic, M. Mernik, and V. Zumer, IEEE Transactions on Evolutionary Computation 10, 646 (2006). 33. S. Das, A. Abraham, U. Chakraborty, and A. Konar, IEEE Transactions on Evolutionary Computation 13, 526 (2009). 34. E. Mezura-Montes, M. E. Miranda-Varela, and R. del Carmen Gómez-Ramón, Information Sciences 10, 4223 (2010). 35. A. K. Qin, V. L. Huang, and P. N. Suganthan, IEEE Transactions on Evolutionary Computation 13, 398 (2009). 36. J. Lampinen and I. Zelinka, Mixed integer-discrete-continuous optimization by differential evolution, part 1: The optimization method, Proceedings of the 5th International Mendel Conference on Soft ˘ Computing (MENDEL ’99), edited by P. Osmera, Brno, Czech Republic, June (1999). 37. J. Gao, H. Li, and Y.-C. Jiao, Modified differential evolution for the integer programming problems, Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence (AICI ’09), Shanghai, China, November (2009), pp. 213–219. 38. W. Jun, Y. Gao, and Y. Lina, An improved differential evolution algorithm for mixed integer programming problems, Proceedings of the 9th International Conference on Computational Intelligence and Security (CIS ’13), IEEE, Sichuan, China, December (2013), pp. 31–35. 39. A. W. Mohamed, International Journal of Machine Learning and Cybernetics (Springer) 1 (2015), DOI: 10.1007/s13042-015-0479-6.
Received: 5 July 2016. Accepted: 15 July 2016.
J. Comput. Theor. Nanosci. 13, 7909–7921, 2016
7921
RESEARCH ARTICLE
18. AECOM Australia Pty. Ltd., Pre-Feasibility Study for a Solar Power Precinct, Final report, Department of Environment, Climate Change and Water (2010). 19. L. Lisell and G. Mosey, Feasibility study of economics and performance of solar photovoltaics in Nitro, West Virginia, Technical Report, National Renewable Energy Laboratory, Colorado (2010). 20. A. Kengpol, P. Rontlaong, and M. Tuominen, Journal of Software Engineering and Applications 6, 470 (2013). 21. M. Vafaeipour, S. H. Zolfani, M. H. M. Varzandeh, A. Derakhti, and M. K. Eshkalag, Energy Conversion and Management 86, 653 (2014). 22. A. W. Mohamed and H. Z. Sabry, Information Sciences 194, 171 (2012). 23. K. Deb, Computer Methods in Applied Mechanics and Engineering 186, 311 (2000). 24. S. Venkatraman and G. G. Yen, IEEE Transactions on Evolutionary Computation 9, 424 (2005). 25. R. Storn and K. Price, Journal of Global Optimization and Engineering 11, 341 (1997). 26. K. V. Price, R. M. Storn, and J. A. Lampinen, Differential Evolution: A Practical Approach to Global Optimization, Springer, Berlin, Germany (2005). 27. R. Storn and K. Price, Differential evolution—a simple and efficient adaptive scheme for global optimization over continuous spaces, Technical report TR-95-012, ICSI (1995). 28. S. Das and P. N. Suganthan, IEEE Transactions on Evolutionary Computation 15, 4 (2011). 29. A. W. Mohamed, Egyptian Informatics Journal 15, 175 (2014).