A Minimalistic Approach to Humanoids Leonid Paramonov and Henrik Hautop Lund The Maersk Mc-Kinney Moller Institute for Production Technology University of Southern Denmark, Campusvej 55, 5230 Odense M, Denmark
[email protected] [email protected] http://www.mip.sdu.dk Abstract In this work, we present a design principle for building humanoid walking that puts emphasis on minimal control, minimal actuation, and minimal energy use in the design. This results in humanoid robots that are easier to develop and much cheaper to produce. We achieve this by utilising springs and the oscillatory motion of pendulums, e.g. the pendulums (or arms) create a 3D dynamic force profile, which leads to walk because of the properties of the robot’s body and legs’ design. We illustrate the design principle with the implementation of a few, cheap LEGO humanoid robot prototypes.
1. Introduction Companies are spending hundred of million dollars to develop humanoids and sell these humanoid robots at very high prices. We question whether these spending/prices are excessive, and we suggest a minimalistic approach to the construction of humanoids and other similar systems. In this approach, we focus on the minimal computational and mechanical skills necessary in order to achieve specific robot behaviours. Previously, researchers in the field of behaviour-based robotics have put emphasis on a bottom-up approach to behaviour development. In the bottom-up approach, simple behaviours are developed first, and later more complex behaviours are allowed to emerge from the interaction between the simple behaviours. This contrasts the classical AI top-down approach, where a complex behaviour is achieved by decomposition into functional modules (e.g sense-model-plan-act). The methods for achieving a bottom-up approach where behaviours emerge from simpler behaviours include the subsumption method [2], evolutionary computation [7], artificial neural network training e.g. [4], etc. Most work on the bottom-up approach concentrate on developing the computational skills, e.g. the control of a robot. However, recent work shows that both control and physical aspects of robots can be co-evolved, and that they are intimately related [5]. Material, physical shape, and mechanical properties influence the behaviour of a
robot, as described in [8]. Hence, we cannot consider development of control in isolation, but we must also investigate the physical properties. Our minimalistic approach to the construction of humanoids combines the bottom-up approach with the new AI focus on interaction between physical properties and control (i.e. between body and brain). For both mechanical properties and control for specific behaviours, we are looking for the minimal complexity necessary in order to achieve the behaviours. Hence, our work aim at showing that complex behaviours often can be explained with simple control mechanisms given the right physical properties. When observing a system (e.g. biological creature or robot) performing specific actions, an external observer might often attribute a more complex control mechanism for accounting for the behaviour than actually necessary to account for the behaviour. It is our purpose to show how simple controllers can account for behaviours for which an external observer often would expect more complex control mechanisms to be necessary. Hereby, we put focus on the frame-of-reference problem [3], which is explained in thorough details in the work by Pfeifer and Scheier [8]. The above is the complexity issue of the frame-of-reference problem, but it also shows the behaviour-versus-mechanism issue, i.e. that a behaviour cannot be explained on the basis on internal mechanisms alone, but it is always the result of a system-environment interaction. The third issue of the frame-of-reference problem is the perspective issue, i.e. the description of behaviour from an observer's perspective must not be taken as the internal mechanisms underlying the described behaviour. For instance, we might observe an agent performing a specific navigation task and extract a rule system that we believe will allow the agent to follow the specific path that we observed. When controlling the agent with the rule system in an identical environment, the agent will follow the same path. However, this will most often demand the environment to be exactly identical. In a slightly different environment, the rule system might give the agent a slightly different behaviour, so that it will not follow the same path.
Proceedings of the IEEE-RAS International Conference on Humanoid Robots Copyright ¤ 2001
Further, if the agent morphology is changed slightly, it might also fail to follow the same path.
motions and need only very small amount of actuation to start the motion and keep it. Designed in this way, pendulums (or ‘arms’) create a 3D dynamic force profile,
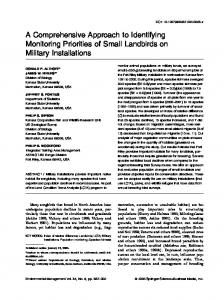
2. Related work and Method To some extend, our methodology is similar to the one advocated by Brooks in the COG project, namely to build humanoid robots bottom-up, e.g. [9, 10]. Especially, the work in the COG project by Williamson [10] on using natural dynamics to control a robot arm has important similarities to the work presented here. However, we put emphasis on an energy-saving principle. As Alexander and his co-workers [1] have shown in their research in the field of biomechanics of humanoids and animals walk, the main approach in natural designs seems to be an energy-saving approach (which makes sense from a simple survival point of view). As an extension of this idea the role of springs (in natural designs this is the role of tendons) were emphasized in the process of walk (pogo stick robots). One way of using springs in an energy-saving approach could be like the pogo stick leg to have a soft, adjusted with motion, interaction between the body of the robot and the ground surface. The overall fluctuation of energy of the system will be comparatively small, but internal energy exchange between potential energy of the springs and the kinetic energy of the body/legs could be rather big. Since energy will naturally leak out of the system because of friction, the actuation should restore the energy level continuously as in a regular pendulum. Another way of using springs could be a return-spring in the limit positions of the leg swing to avoid doing work by actuators and thereby avoid wasting energy at the beginning and the end of each swing of the leg [1]. The range of free motion (or use of weak spring with low stiffness) around downward position of the leg in combination with return springs and stiff motion restrictions at the limit positions of the leg creates a nonlinear cubic-like spring characteristics which is rather easy to design by simple structures (e.g. using LEGObricks and rubber-bandages or simple springs). (see figure 1). To bring an oscillatory motion inside the system simple pendulums could be used. These pendulums could be controlled by one motor and a rather simple control oscillatory sequence (like sinusoid or +/- constant value). These pendulum motions are very energy friendly because they are very close to a natural pendulum’s
Figure 1. Schematic drawing that shows the way springs and pendulums are utilized in order to make energy-saving walking patterns. ¤ Lund and Paramonov 2001.
which leads to (a kind of) walk because of the properties the robot’s body and legs’ design. For instance, dynamic reaction that cause one leg relaxation coupled with dynamic momentum around the vertical axe (yaw) lead to a single step. Creating such a simple stable periodic gait pattern, which could be controlled by simple change of the oscillatory control sequence (swing arms more to the left means turning left while walking) or by body parameters variation (e.g. the weight distribution), is the main issue in the design of our simple robots. We are trying to use these simple ideas in our designs to reach desired walking behaviour of the many robots we have developed so far. The chaotic behaviour around stable periodic solutions in simple non-linear systems is probably one of the most popular topics in modern Control Theory. The main instance of such a behaviour is, of course, McGeer’s passive walkers which partially utilise similar principles [6]. But unlike the McGeer's walkers we always assume the presence of oscillatory actuation in the system. Another more important issue which makes our robots differ from passive walkers is that we always start from the stable robot’s position in the rest and remain stable until the system reach enough energy level to start the walking process (this could, for instance, take from two
Proceedings of the IEEE-RAS International Conference on Humanoid Robots Copyright ¤ 2001
to five-seven arm-swinging motions). The same is true for the end of the motion: if we turn off the actuation the robot remains stable until it reaches the stable rest position because of energy dissipation. Further, our main goal is to make the robot walk on a horizontal surface and not downhill as in McGeer’s work although these two possibilities do not exclude each other. It seems possible to create a robot that combines both behaviours.
3. Experiments We made a number of prototypes to show the advantages of the above-mentioned design principle. The prototypes are very cheap, both in terms of development time, material (hardware), control, energy use, etc. Indeed, in order to underline this fact, we chose to make cheap LEGO robot walking machines that use only one motor to allow the robots to walk and turn.
Figure 3. Images of a second prototype where the pendulum is no longer the arms, but the head of the robot, which can swing from side to side. ¤ Lund and Paramonov 2001.
It is possible to make a number of prototypes that utilise the above-mentioned principle. In a second prototype (see figure 3), we used the same design of legs (“chicken legs”). However, we reached a better level of stability (and the robot is higher), which can be seen from the small size of feet on the second prototype. To illustrate other possibilities of the concept, we have made only one oscillating pendulum in this prototype. The pendulum oscillation is directed upwards, and the control is done by change of weight distribution of the body (a small additional weight which could be moved to one side according to the desired direction of walking).
4. Conclusion and future work Figure 2. Images of a prototype that shows the principle of using just one motor to allow the robot to walk. The motor is on the top of the robot attached to the pendulum (i.e. the arms). ¤ Lund and Paramonov 2001.
The first prototype to be mentioned here utilise a chicken-like design of legs and two cooperated pendulum-arms, which create dynamic reaction in the system (see figure 2). The control law used in this robotdesign is to swing the pendulums with zero average in order to create shift of balance in roll direction and thereby allow the robot to make steps. To make the robot turn, we can change the average level of arm swinging to the side of turn (e.g. swing pendulums more to the left in order to turn left). So, with this very simple control strategy, the robot prototype is able to walk straight and turn to the sides. The reason for this is the coupling between the mechanical design, the material properties and the control strategy.
We have indicated how a design principle that takes material, control mechanical, and dynamical properties into account may lead to cheap design of some features that are essential in designing humanoids. It is our belief that the bottom-up approach is the way to go in order to develop humanoids. In future, we will show how new features may be added to the design described here (e.g. we can add a second motor to create other kinds of motion than walking straight and turning), but still trying to keep a minimalistic approach in order to decrease the production and sales costs of humanoids.
References [1] Alexander, R. Three Uses for Springs in Legged Locomotion. The International Journal of Robotics Research, 9:2, 53-61, 1990. [2] Brooks, R. A. A robust layered control system for a mobile robot. IEEE Journal of Robotics and Automation, 2:1, 14-23, 1986.
Proceedings of the IEEE-RAS International Conference on Humanoid Robots Copyright ¤ 2001
[3] Clancey, W. J. The invention of memory (by Israel Rosenfield). Book review. Artificial Intelligence, 50, 241-284, 1991. [4] Lewis, F. L. Neural Network Control of Robot Manipulators. IEEE Expert/Intelligent Systems & Their Applications, Vol. 11, No. 3, June 1996. [5] Lund, H. H. Co-evolving Control and Morphology with LEGO Robots. In Hara and Pfeifer (eds.) Proceedings of Workshop on Morpho-functional Machines, Springer-Verlag. To appear. [6] McGeer, T.. Passive Dynamic Walking. The International Journal of Robotics Research, 9:2, 62-82, 1990. [7] Nolfi, S. and Floreano, D. Evolutionary Robotics, MIT Press, MA, 2001. [8] Pfeifer, R. and Scheier, C. Understanding Intelligence. MIT Press, MA, 1999. [9] Scassellati, B. Building Behaviors Developmentally: A New Formalism. Proceedings of the 1998 AAAI Spring Symposium on Integrating Robotics Research. AAAI Press, 1998. [10] Williamson M. Robot Arm Control Exploiting Natural Dynamics, doctoral thesis, MIT, Dept. Electrical Eng. and Computer Science, MA, 1999.
Proceedings of the IEEE-RAS International Conference on Humanoid Robots Copyright ¤ 2001