proposed for AQM (Floyd and Jacobson 1993). The. RED algorithm makes network operate with high throughput and low average delay. However, the re-.
Copyright © 2002 IFAC 15th Triennial World Congress, Barcelona, Spain
ACTIVE QUEUE MANAGEMENT ALGORITHM WITH A RATE REGULATOR Hyuk Lim, Kyung-Joon Park, Eun-Chan Park and Chong-Ho Choi
School of Electrical Engineering and Computer Science Seoul National University, Seoul 151-744, Korea E-mail {hyuklim, kjpark, ecpark, chchoi}@csl.snu.ac.kr
Abstract: In this paper, we propose an efficient control scheme for active queue management (AQM) supporting TCP flows. The proposed controller consists of two parts: a rate controller and a queue size controller. The rate controller is a proportional-integral (PI) controller, which improves the response to dynamic traffic variation and keeps the packet arrival rate around the link capacity. The queue size controller is a proportional (P) controller like the Random Early Detection (RED) algorithm. The rate controller gains are obtained by minimizing the performance index, either the integral square error (ISE) or the integral absolute error (IAE). We compare the performances of the proposed algorithm, the RED algorithm and the PI controller for AQM through ns simulations. Keywords: Computer networks, Closed queueing networks, Queueing network models
1. INTRODUCTION The congestion control has been widely studied to enhance the performance of the network. The congestion control with drop-tail queues in TCP networks has some problems. First of all, the TCP sources of drop-tail queues reduce their rates only after detecting packet losses due to a buffer overflow. Therefore a considerable time may have passed between the packet drop and its detection. At the same time, a large number of packets may have been dropped as the sources continue to transmit at a rate that the network cannot support. In addition, the packet drops at a droptail queue could result in the global synchronization of sources (Floyd and Jacobson 1992). To alleviate these problems, the RED gateways were proposed for AQM (Floyd and Jacobson 1993). The RED algorithm makes network operate with high throughput and low average delay. However, the resulting average queue size is sensitive to TCP traffic load and the RED parameter settings. (Feng et al. 1999a)(Feng et al. 1999b)(Floyd et al. 2001). Many variants of RED were proposed to resolve these problems (Feng et al. 1999b)(Ott et al. 1999)(Wang
and Shin 1999)(Cnodder et al. 2000)(Athuraliya et al. 2001). Recently, several researchers have proposed control theoretic approaches (Hollot et al. 2001a)(Hollot et al. 2001b)(Aweya et al. 2001a)(Aweya et al. 2001b). In (Hollot et al. 2001a) and (Hollot et al. 2001b), the authors gave a control theoretic analysis of the RED and designed a PI controller which outperformed the RED significantly. The authors of (Aweya et al. 2001a) and (Aweya et al. 2001b) focused on stabilizing the queue size and proposed an integral controller for AQM. In this paper, we propose an efficient control scheme for active queue management. In order to improve the response to dynamic traffic variation, we add a rate controller to a queue size controller. To obtain the control gains, we model the AQM as a first order lag plus delay (FOLPD) system, which is a simplified version of (Hollot et al. 2001a), and apply an optimization method to the rate control system. The rate control gains are obtained by minimizing the performance index, either the integral square error (ISE) or the integral absolute error (IAE). The rate control can compensate for the rate fluctuation even before the it affects the queue size. The proposed scheme with a
Target Queue
Queue Size
Packet Drop
Size; Tq
Error; qe
Rate; p Congestion Controller
Controller
Packet Arrival
Queue Size; q
Rate; λ TCP Dynamics
1
Router Queue
Queue Dynamics
pmax
Feedback
0
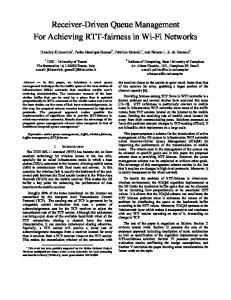
Fig. 1. TCP congestion avoidance as a closed-loop feedback control system rate control responses quickly to dynamic traffic, and reduces the queue size variance and the packet loss rate. We compare the proposed scheme with the RED and the PI controller for AQM. The rest of the paper is organized as follows. In Section 2, we present a linearized model for the AQM system. In Section 3, we describe the RED and the PI algorithm for AQM. In Section 4, we propose an efficient control scheme for enhancing the network performance. We compare the proposed algorithm with the RED and the PI controller via simulations using an ns-2 network simulator (Fall and Varadhan 2001) in Section 5. Finally, we present the conclusion in Section 6.
minth
q¯
γ = Queue occupation rate (packets/sec) q R = round-trip time = + Tp (sec) C C = link capacity (packets/sec) Tp = propagation delay (sec) N = load factor (number of TCP connections) p = probability of packet mark/drop: If we assume N (t ) = N and R(t ) = R0 , then we can linearize the dynamic model about the operating point (W0 , γ0 , p0 ) as the following: ˙ (t ) = δW
R0C 2 δ p(t 2N 2
2N δ W (t ) R20C N δ W (t ) R0
R0 ) (2)
where
2. FOLPD MODEL
δW
AQM algorithms control network congestion by dropping or marking packets with ECN (Explicit Congestion Notification) (Ramakrishnan and Floyd 1999). When TCP sources detect that their packets are dropped or marked with ECN, they reduce their sending rates, and the queue size of the router decreases. This process constitutes a closed loop feedback control system as shown in Fig. 1 (Aweya et al. 2001a). The system consists of TCP sources, a router queue, and a congestion controller. The congestion controller regulates the queue size of the router by changing the drop probability. We adopt the dynamic model of TCP behavior presented in (Hollot et al. 2001a), which was developed using fluid-flow and stochastic differential equation analysis. This model relates the average value of key network variables and is described by the following coupled, nonlinear differential equations:
where
B
Fig. 2. The drop probability function of the gentle RED W = TCP window size (packets)
δ γ (t ) =
1 W (t )W (t R(t )) p(t W˙ (t ) = R(t ) 2 R(t R(t )) W (t ) γ= N (t ) C R(t )
maxth
R(t )) (1)
=W
W0; δ γ
=γ
γ0 ; δ p = p
p0
Instead of considering the queue size as in (Hollot et al. 2001b), we consider the queue occupation rate γ . Then, the dynamic equations are written as a firstorder lag plus delay (FOLPD) model. The FOLPD model is characterized by three parameters, i.e., the gain Kg , the time constant Tg and the delay τ (Zhuang and Atherton 1993). G(s) =
δ γ (s ) δ p(s )
=
Kg e sτ Tg s + 1
(4)
where Kg =
R20C3 R20C ; Tg = ; τ 4N 2 2N
= R0 :
3. RED AND PI CONTROLLER The RED algorithm manages the queue size by randomly dropping packets with an increasing probability as the average queue size increases. The drop probability p is a linear function of the average queue size q. ¯ Fig. 2 shows a packet drop probability function of a gentle RED (Floyd 2001). The gentle RED has two slopes. One is pmax (6) s1 = maxth minth
Target Queue
Size; Tq
Queue size Controller
Rate Controller
C(s)
Link Capacity C
Queue Size; q
TCP Dynamics
R(s)
λ
1 s
Proportional rate control
λs C Throughput T ( p)
Rate cont rol loop ps
Queue size cont rol loop
Fig. 3. The block diagram of the proposed P-PI control scheme when the average queue size is between the minimum and the maximum thresholds [min th , maxth ], and the other is 1 pmax s2 = (7) B maxth when the average queue size is between the maximum threshold and the maximum buffer size [max th , B]. The drop probability function can be expressed as p = sat (u);
(8)
where u is the congestion controller output as
� u=
s1 (q¯ s2 (q¯
minth ) q¯ < maxth maxth ) + pmax otherwise
(9)
and sat (�) is a saturation function defined as
8 1 x