Abstract. The design of the control of an aircraft encountering windshear after takeoff is treated as a problem of stabilizing the climb rate about a desired value of ...
Progadlnga of the 29th Conference on Docldon and Control Honolulu, Hawall December 1990
WP-8-2
- 4:40
Aircraft Control Under Conditions of Windshear George Leitmann and Sandeep Pandey Department of Mechanical Engineering University of California, Berkeley, CA 94720
Abstract The design of the control of an aircraft encountering windshear after takeoff is treated as a problem of stabilizing the climb rate about a desired value of the climb rate. The resulting controller is a feedback one utilizing only climb rate information. Its robustness vis-a-vis windshear structure and intensity is illustrated via simulations employing four different windshear models.
D = D (V ,a)= drag force g = gravitational force per unit mass (=constant ) h = vertical coordinate of c.m. L = L ( V , a ) = lift force m = aircraft mass (=constant) t =time T = T ( V ) = maximum thrust force
1. Introduction The problem of guiding an aircraft encountering windshear has gained considerable importance since a 1977 FAA study revealed low-level windshear as a contributing factor in many accidents involving large aircraft; e.g., see [1],[2]. Much effort has gone into modeling and identifying windshear; e.g., see 131-161. Other investigations have been concemed with the design of controllers to enhance the chances for survival while encountering windshear during takeoff or landing. Primary among these have been the pioneering studies of Miele; e.g., see [2],[7]-[9] and many others referenced in [lo]. The socalled simplified gamma guidance scheme, espoused by Miele, is one based on attaining "near-optimal'' trajectories in the presence of a given windshear structure; it has been shown to have good survival capability in the prescribed windshear model. Another major contributor to the topic of aircraft control is Bryson; e.g., see 1111, where the guidance scheme consists of a nonlinear nominal control together with a linear feedback designed to stabilize the response of a linearized system about a desired nominal trajectory. Yet another approach has been via deterministic control of uncertain system' ; e.g., see [12]-[15]. While [12] and [13] employ angle of attack control, the former to stabilize all state variables and the latter only the relative path inclination, [ 141 utilizes the difference between angle of attack and its nominal value as control to stabilize relative path inclination deviation from its desired value; this results in a considerably smoother angle of attack history. Finally, the Soviet efforts, exemplified by 1151, employ a "game against nature" approach to deal with the uncertian environment due to windshear. These methods of control design for uncertain systems do not utilize any a priori information about the system uncertainties; they do require a priori assumptions on uncertainty bounds, here bounds of wind and wind rate of change. In this paper we present, in broad strokes due to space limitations, yet another approach to aircraft guidance in windshear. A detailed discussion can be found in 1171. In particular, we consider the control of the vertical velocity component (rate of climb) by means of the angle of attack deviation from its nominal value. In counter-distinction to [ 121-[151, no a priori bounding information is needed.
V = aircraft c.m. speed relative the wind W, = horizontal component of wind velocity W, = vertical component of wind velocity x = horizontal coordinate of c.m. a = relative angle of attack y = relarive path inclination 6 = thrust inclination ( ' ) = time derivative of ( ).
We confine ourselves to guidance during take-off for which the assumption of flight in the vertical plane seems justifiable. We also neglect the rotational dynamics of the aircraft, as well as those of the sensors and actuators; however, to make up for these neglected dynamics, we impose a bound on the angle of attack rate, la1 s c (5) where C>O depends on the aircraft under consideration. Also, to account for a particular aircraft's capabilities, we impose a restriction on the attainable relative angle of attack, a ( t ) E I0,a.l .
Furthermore, the range of practical values of the relative speed is limited; that is,
(1)
h=VsinytW, mV=Tcos(a+G)-D -mg s i n y m (W, coq+W,, siny)
(2) (3)
mVpTsin(a+G)+L-mg cosykm (W, siny-Whcosy)
(4)
3.Proposed Control As mentioned earlier, here we are concerned with maintaining a desired rate of climb, regardless of wind conditions; of course, in view of the aircraft capabilities, as embodied in constraints (5)-(7), this is not an attainable goal and the aircraft is bound to crash under sufficiently severe conditions. Since we wish to control i ( t ) , let us consider h = N [ c o s ( a - t s ) siny +sin(u;;-6) c m
o
s m+
~
s
im n
p
~( 8 )~
It is noteworthy that h ( t ) does not depend explicirly on windshear, but rather only implicitly through the variables V ( t ) and y(t), for given angle of attack a ( t ) . Thus, suppose one wishes to steer the aircraft so as to climb at a prescribed rate hr(t); that is, we desire h ( t ) = &(I)
where
(9)
In the ensuing discussion we restrict ourselves to a constant desired climb rate, & ( t ) = hr = constant, so that L(I) E 0 in view of (9). Hence, regardless of wind conditions, an "admissible" solution:! of (8) with h ( r ) 3 0
For a survey of such methods, see [161.
CH2917-3/90/0000-0747$1 .OO@ 1990 IEEE
(7)
_vS,VS;V,
where and B again depend on the aircraft under consideration. Restrictions (5) and (6) are neglected in the derivation of the proposed guidance scheme, but are taken into account in the numerical simulations. Conversely, restriction (7) is used in deducing the proposed control, but is not imposed in the numerical simulations.
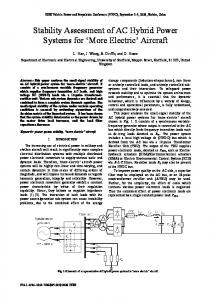
2. Equations of Motion Following Miele and Bryson, we consider the motion of the aircraft's center of mass (c.m.) described by (see Fig. 1) x=vcosykw,
(6)
747
~
~
g
2. A. Miele, T. Wang, C.Y. Tzeng and W.W. Melvin, "Optimization and Guidance of Abort Landing Trajectories in a Windshear," Paper No. AIAA-87-2341, AIAA GUIDANCE, NAVIGATION and CONTROL CONF. 1987. 3. S. Zhu and B. Etkin, "Fluid Dynamic Model of a Downburst," UTIAS Report no. 271, Institute of Aerospace Studies, University of Toronto. 4. W. Frost, "Flight in a Low Level Wind Shear," NASA Report CR 3678, 1983. 5. W. Frost and D.W. Camp, "Wind Shear Modeling for Aircraft Hazard Definition," FAA Report FAA-RD-77, U.S. Department of Transportation, 1977. 6. W.J. Grantham, G.G. Roetcisoender and E.K. Parks, "A DFW Microburst Model based on AA-539 Data," J. of AIRCRAFT (to appear). 7. A. Miele, T. Wang and W.W. Melvin, "Guidance Strategies for Near Optimum Take-off Performance in a Windshear," J. OPTIM. THEORY and APPL., 50, 1, 1986. 8. A. Miele, T. Wang, W.W. Melvin and R.L. Bowles, "Maximum Survival Capability of an Aircraft in a Severe Windshear," J. OPTIM. THEORY and APPL., 53, 2, 1987. 9. A. Miele, T. Wang, W.W. Melvin and R.L. Bowles, "Gamma Guidance Schemes for Flight in a Windshear," J. GUIDANCE, CONTROL, and DYNAMICS, 11,4, 1987. 10. A. Miele, T. Wang, H. Wang and W.W. Melvin , "Overview of Optimal Trajectories for Flight in Windshear," in CONTROL and DYNAMIC SYSTEMS, 34, Part 1, (ed. C.T. Leondes). Academic Press, 1990. 11. A.E. Bryson, Jr. and Y. Zhao, "Feedback Control for Penetrating a Downburst," AIAA Paper No. AIAA-87-2343, 1987. 12. Y.H. Chen and S. Pandey, "Robust Control Strategy for Take-off Performance in a Windshear," OPTIM. CONTROL, APPL. and METHODS, 10, 1, 1989. 13. G. Leitmann and S . Pandey, "Aircraft Control Under Conditions of Windshear," in CONTROL and DYNAMIC SYSTEMS, 34, Part 1, (ed. C.T. Leondes), Academic Press, 1990. 14. V. Kaitala, G. Leitmann and S. Pandey, "Robust Aircraft Take-Off Control: A Comparison of Aircraft Performance under Different Windshear Conditions," PROCEED. FOURTH INT'L SYMP. on DIFF. GAMES and APPL., Helsinki, Sept. 1990. 15. N.D. Botkin, M.A. Zarkh and V.S. Patsko, "Numerical Solution of a Linear Differential Game," PROCEED. FOURTH INT'L SYMP. on DFF. GAMES and APPL., Helsinki, Sept. 1990. 16. G. Leitmann, "Deterministic Control of Uncertain Systems via a Constructive Use of Lyapunov Stability Theory," PROCEED. 14th IFIP CONF. on SYSTEM MODELING and OPTIMIZATION, Leipzig, July, 1989. 17. G. Leitmann and S. Pandey, "Aircraft Control for Flight in an Uncertain Environment: Takeoff in Windshear," PROCEED. CONF. on MODELING and CONTROL of UNCERTAIN SYSTEMS, Sopron, Sept. 1990.
a(i)= a.(V(i),HO) (10) assures satisfaction of (9), namely, ascent at the desired rate. As can be seen from subsequent simulations (Fig. 2), the feedback controller (10) can accomplish this goal in the absence of wind, but saturates (Fig. 3) and hence does not assure (9) and hence survival even in relatively weak windshear. Consequently, we adopt a deterministic controller of the form (11) Aa(Ah'(t)) = a(0 - an(V(0),%O)) where I = O3 is defined as the time of encountering windshear and initiation of the controller (1 l), with & ( I ) = i(t)- & ( I ) = i(1)- v(o)sinHo) , (12) . C1Ah Aa(Ah) = ___ CZ (13) IC,Ah I + E
v,
and the Ci depending on / A i l , E, the parameters of T , L and D , and a design parameter. The gain parameter E > 0 can be adjusted to improve tracking (diminishing IAh'(1)I) in the absence of saturation of a ( t ) and &(I), or to diminish controller gain to avert or at least decrease the effects of saturation. Of course, once the design and gain parameters are selected, they cannot be altered on the basis of unavailable information about windshear. 4. Simulation Results Numerical simulations were carried out for the Boeing 727 aircraft and four windshear realizations as embodied in (i) a discrete version of Miele's windshear model, (ii) Bryson's windshear model, (iii) a double vortex, and (iv) Miele's model combined with a double vortex; for detailed descriptions of these windshear models see [13] and [17]. For each of these windshear models the altitude and angle of attack histories, h ( i ) and a(r), are shown in Figs. 4-7 employing Miele's simplified gamma guidance [9], Bryson's nonlinear controller [ll], and the proposed controller (13), respectively. As expected, in each case survivability decreases with increasing windshear intensity.
5. Summary A relative angle of attack control is proposed to obtain rate of ascent tracking for an aircraft encountering windshear during takeoff. The proposed guidance scheme requires no a priori information or assumptions about windshear structure or intensity, is relatively robust, and results in a relatively smooth angle of attack history.
* I.e., one satisfying constraints (5) and (6). Since the windshear cannot be observed directly, but rather only through ils observable effects, in practice we may assign permissible bounds on the deviations IV(r) - V,,(f)l and I%[) - ya(t)l, where subscript n denotes the values of the variables generated by angle of auack (IO) in the absence of windshear. Time t = 0 is then the first instant when either deviation reaches its assigned bound.
References 1. M.E. Long, "The Air-Safety Challenge," NATIONAL GEOGRAPHIC, 152, 2, August 1977.
"r I
I--
1,-
11"
cow>
F i g . 3 a ( t ) = an w i t h o u t wind (dashed) F i i . 1 Coordinate system a$d f r e e body F i g . 2 h ( t ) due t o an w i t h o u t wind d iagram . and w i t h wind ( s o l i d ) . (dashed) and w i t h wind ( s o l i d ) .
748
'I -e
I
I IO
1
I
I
w
a
TIN
Miel e ' s simp1i f i e d gamma guidance Io
12-
I
n
5
1-1
a ! "
1
-
r
I
l
, , T l r
I
I
I
0
4
I-
I
I
a
I
O
,
I
,
t
11-
Bryson's nonlinear control
L
Proposed control F i q . 4 h ( t ) and a ( t ) f o r Fliele's ivindshear model
749
,
Bryson's nonlinear control
t Proposed controller F i g . 5 h(t) and a(t) for Bryson's windshear model
750
e
l
1
I
1
I
z
a
T i n
Miele's simplified gamma guidance
Bryson's nonlinear control
t Proposed control Fig. 6 h ( t ) and a(t) for double vortex model
751
=
I *
-----___--_
e* I t
TI.
e->
I
L
l
TI.
I
2
Miele's simplified gamma quidance
Bryson's nonlinear control
t
---
Proposed control Fig. 7 h(t) and a(t) for Pliele's model combined with double vortex model
752
O
( . I )
a
1 a