having maximum sum power constraints across user transmit antenna elements, ... For instance, this may occur from users listening to pilots transmitted by each ...
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
1
Distributed Power Control for Cellular MIMO Systems with Temporal and Spatial Filtering John Papandriopoulos, Jamie Evans and Subhrakanti Dey
Abstract— This paper concerns the uplink in a cellular MIMO system employing CDMA. Specifically, the problem of joint power control and interference suppression is considered, where filtering is jointly done in both temporal and spatial domains. Iterative algorithms are developed that converge to the globally optimum solution; we then shown how they may be implemented in a distributed context utilizing only local measurements at each base station. Numerous linear filter structures are analyzed, each differing in the computation complexity of implementation. Soft dropping power control in the MIMO context is also investigated with the aim of increasing the number of users admitted to the wireless network and also the likelihood of having a feasible problem. Index Terms— CDMA, MIMO Channel, Multiuser Detection, Power Control, Soft Dropping, MMSE.
I. I NTRODUCTION ULTIPLE input, multiple output (MIMO) systems have enjoyed an explosive interest in recent years, with the main impetus being the possibility of achieving extraordinarily higher bit-rates and capacities with relatively low complexity as compared to the best of existing single antenna systems today. The main advantage of such systems comes from exploiting spatial diversity through antenna beamforming in addition to the traditional methods employing temporal diversity. In code division multiple access (CDMA) systems, the benefits of MIMO systems are especially appealing. It is well known that such systems are interference limited and suffer from the near-far effect, where a mobile user close to the base station receiver may overpower another mobile user relatively far away. By using antenna arrays at the base station receiver, one may reduce the interference by beamforming toward the desired user, reducing or nulling out the interference caused by others [1]–[3]. In addition, multiuser detection methods aim to similarly reduce the interference in the temporal domain by exploiting its structure [4]. While there are many types of multiuser receivers, the optimal being exponential in complexity with the number of users in the system, a popular linear multiuser detector is the MMSE receiver that aims to minimize the mean squared error between the filter output and the data bit of the intended user [5]. It is well appreciated that transmitter power control also has benefits of increased system capacity through interference
M
The authors are with the ARC Special Research Centre for Ultra-Broadband Information Networks (CUBIN), Department of Electrical and Electronic Engineering, University of Melbourne, Melbourne VIC 3010, Australia, email: {jpap, jse, sdey}@ee.mu.oz.au This work was supported by the Australian Research Council.
reduction in addition to prolonging the battery life of mobile devices. It is therefore advantageous to consider jointly optimizing transmit powers and receive filters (both temporal and spatial) to gain the benefits of all techniques and has been the topic of many studies [6]–[9]. This work deals with a multiuser cellular MIMO context, where each user splits their data stream across a number of transmit antenna elements; each element employing a different CDMA temporal spreading code. At the base station, an antenna array is utilized for interference reduction in the spatial domain, in addition to (joint) multiuser filtering in the temporal domain for additional degrees of freedom. We consider a number of joint spatial and temporal filters introduced in [10]. The difference between them stemming from the fact that the optimal linear receiver using the MMSE criterion requires the inversion of a very large matrix. Other suboptimal linear receivers enjoy lower computational complexity at the expense of lower performance (effectively having fewer degrees of freedom). One of the main goals of this paper, and indeed contributions of this work, is the development of distributed algorithms that solve the joint power control and filtering problems with globally optimum solutions. Previous work has dealt with vector channels where each mobile user has a single antenna and spatial-temporal diversity is achieved at the base station receiver [8]. We show the relation between our model and these vector channels through a ‘virtual user’ concept allowing many existing results to be applied and extended. For instance, we extend the concept of “soft dropping” [11] to the MIMO system, where the signal to interference ratio threshold targets of each user are dynamically adjusted according each user’s respective power allocation. The motivation for doing so is that it may transform an otherwise infeasible problem into one that has a solution; doing so by the introduction of the additional degrees of freedom in the system. The end result is that more users may be admitted to the network. In the MIMO context, soft dropping becomes an interesting problem as it induces a tight coupling between transmit elements of each user. In [8], power control, beamforming and multiuser detection were coupled and iterative algorithms proposed. However these were formulated as centralized algorithms requiring global knowledge of the cell landscape. We analyze and apply such algorithms to the cellular MIMO channel and show how they may be implemented in a distributed manner using localized measurements at each base station receiver. To summarize, the main contributions of this paper are: • An extension of a joint power control and spatialtemporal filtering problem to a cellular MIMO system
2
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
having maximum sum power constraints across user transmit antenna elements, • A mapping back from the cellular MIMO system to existing vector channel models allowing existing results to be applied to the new problem, • An extension of the soft dropping power control concept to the cellular MIMO system, and • Decentralized and iterative power control algorithms to find globally optimum solutions to the joint problems. Numerical results are also provided for the power control algorithms considered, in the context of a four cell CDMA network. II. S YSTEM M ODEL In this paper, we consider the uplink in a multicell direct sequence synchronous code division multiple access (DSSCDMA) communications system having K users and a spreading gain of η. For clarity of exposition, we assume each mobile user has M transmit antennas arranged in an array and similarly, each base station is assumed to have a receiver array having N elements. The following developments can be easily modified to cater for disparate numbers of elements at each mobile and base station, at the expense of a more cumbersome notation. Each user is assumed to have a single data stream that is split evenly across all M elements (a serial to parallel operation). For each transmit antenna element, we assume a BPSK modulation scheme. In this DS-SCDMA system, each user is differentiated by M temporal signatures in addition to M spatial signatures; the former are typically the “signature sequences” used in conventional single antenna CDMA systems and the latter is due to the receiver array at the base station. Following the conventions of [10], we assume the temporal signature of user j’s element m of the form Sj,m (t) =
η X
(l)
Sj,m ψ (t − (l − 1)Tc )
l=1
where ψ(t) is the chip waveform and Tc its duration. We will further assume that the chip waveform has unit energy over the R ηT √ (l) 2 duration [0, Tc ] with Sj,m = ±1/ η, giving 0 c Sj,m (t)dt = (l) 1. In this work, the sign of all Sj,m are assumed to be chosen randomly initially then fixed. This work assumes a fixed base station assignment of user stations. For instance, this may occur from users listening to pilots transmitted by each base station and selecting the one with largest average gain across all antenna elements. At the base station assigned to user i, the received signal over one bit period at the output of the antenna array is given by ri (t) =
K X M h iT X p Pk,m Bk,m Sk,m (t) h(i,k) + ni (t) k=1 m=1
m
where ( · )T denotes a matrix transpose and [ · ]m denotes the m-th row of the given matrix. The terms in the above expression are given as follows: • Pk,m is the transmit power of user k’s m-th antenna element,
• •
•
h(i,j) is channel gain matrix from user j to the assigned base station of user i (see below), Bk,m is the transmitted bit from user k’s m-th antenna element, assumed to be mutually independent with realizations equally likely from the set {−1, 1} and ni (t) is the white Gaussian receiver noise term.
We model the instantaneous channel gain of the entire system as a KM ×KN block matrix H consisting of K 2 subblocks h(i,j) , each having dimension M × N . Each� individual � element of any particular sub-block, denoted by h(i,j) m,n , represents the instantaneous complex channel gain from the m-th element of user j to the n-th element of the base station assigned to user i. Feeding the received signal ri (t) into a chip-matched filter and sampling at the chip rate yields η observations across the N receive antenna elements. The sampled signal at the l-th chip is given by the N -length column vector K X M h iT X p (l) Pk,m Bk,m Sk,m h(i,k) + nl .
(l)
ri =
m
k=1 m=1
(1)
Let us now express the channel gain vector in (1) as h iT q m h(i,j) = Gm i,j Ai,j m
where Am ij is the spatial signature of user j, a length N �H m column vector having unit norm, i.e. Am Aij = 1; and ij Gm is a scalar representing the path gain from the m-th ij element of user j’s array to the base station assigned to user i. We can then rewrite (1) as (l)
ri =
K X M q X
(l)
m l Pk,m Gm i,k Bk,m Sk,m Ai,k + ni .
(2)
k=1 m=1
Over an entire bit period T = ηTc we accumulate η of these N -length samples and can arrange them in a η × N matrix h iT (1) (2) (η) Ri = ri , ri , . . . , ri =
K X M q X m T Pk,m Gm i,k Bk,m Sk,m Ai,k + Ni .
(3)
k=1 m=1
Here the l-th column of Ri can be expressed as (l)
zi =
K X M q X
m (l) Pk,m Gm +n ˜ li . i,k Bk,m Sk,m Ai,k
(4)
k=1 m=1
The noise matrix Ni in (3) represents the noise in both spatial and temporal domains that is white (independent within, and across both domains) with covariance matrix ∗ E [Nmn Npq ] = σ 2 δmp δnq
(5)
where ( · )∗ denotes the conjugate of a complex number. This model is an extension to a full cellular MIMO system of those models given in [8], [10]. In the next sub-section, we shall see a one-to-one mapping from this model and those given in the cited references.
DISTRIBUTED POWER CONTROL FOR CELLULAR MIMO SYSTEMS WITH TEMPORAL AND SPATIAL FILTERING
3
To see this, we can rewrite (2)–(4) as (l)
ri =
KM X
√
(l)
pj gij bj sj aij + nl
(7)
j=1 (l)
zi =
KM X
√
(l)
pj gij bj sj aij + nl
(8)
pj gij bj sj aTij + Ni
(9)
j=1
Ri =
KM X
√
j=1
where we introduce the mapping pj = Pbs(j),ms(j) ms(j)
gij = Gi,bs(j) bj (l) sj
(a) Cellular MIMO channel model with two Mobile Stations (MS) and two Base Stations (BS).
= Bbs(j),ms(j) (l)
= Sbs(j),ms(j) ms(j)
aij = Ai,bs(j) through the functions bs(j) = bj/Kc, ms(j) = [(j − 1) mod K] + 1 (b) Base Station functional block diagram for user i. Fig. 1.
System Model Summary
Finally, we note that to detect the information bits {Bi,m : 0 ≤ m ≤ M } of user i to recover the original data stream, we take the sign of the real part of the decision statistic
yi,m =
η X M X
where b · c gives the integer part of the argument, and ∆ a mod b = a − bba/bc is the modulus operation giving the remainder of the division a/b. Equations (7)–(9) have exactly the same form as those in [10] where we have M times the number of users in our system. This allows us to use many of the results given in [8] for the full cellular MIMO channel, where the focus of this paper is to extend such work toward distributed power control algorithms. III. C ONVENTIONAL P OWER C ONTROL
(q,r) ∗ (q,r) Xi,m Ri
= tr
XH i,m Ri
�
(6)
q=1 r=1
where Xi,m is a 2-D combined spatial-temporal linear filter [10] corresponding to the m-th antenna element of user i. The system model is summarized pictorially in Fig. 1.
A. Mapping from K users to KM virtual users Until this point, each transmit antenna across the cell landscape has been treated as an independent entity. We can further abstract the system model by considering each transmit antenna in the entire cell landscape as a separate “virtual user”, turning our MIMO channel into a vector channel as considered in [8]. However, any constraints that we might place on each real user (e.g. a sum power constraint across transmit elements), we would then need to place on groups of virtual users in this new context.
This section considers the power control problem where we wish to find the transmit powers of each real user such that their total sum is minimized while simultaneously meeting each user’s Quality of Service (QoS) requirement. It is quite usual for these requirements to be specified in the form of a Signal to Interference Ratio (SIR) threshold that must be met for each user’s individual antenna elements (for example, see [12]–[14] and references therein). We will consider uniform SIR thresholds common to all users for simplicity and it is trivial to extend the following results to the case where different QoS classes may exist. The total transmit power of each real user is usually constrained due to many mobile devices relying on battery power in practice. Previous work has dealt with maximum power constraints on individual antenna elements in the multiuser vector channel [8]. It is then natural, in the multiuser MIMO channel, to be concerned with a sum power constraint across a user’s transmit antenna elements. For clarity, we will first consider a fixed linear receiver structure Xi,m . The matched temporal-spatial filter is one mT example, given by XMF i,m = Si,m Ai,i . Once key results have been established we will consider the joint power control and temporal-spatial filtering problem in Section IV.
4
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
A. Problem Definition The power control problem can be posed as the optimization min P
s.t.
K X M X
Pk,m
(10)
k=1 m=1
SIR k,m M P Pk,i
≥ γ th ≤ P max
i=1
Monotonicity If P ≥ P0 , then I(P) ≥ I(P0 ). • Scalability For all α > 1, αI(P) > I(αP). We now wish to find an iterative algorithm to solve (10). Before we begin, we observe that the SIR constraint can be rewritten as •
Pk,m
≥ 0 k = 1, . . . , K m = 1, . . . , M
where P max is the maximum sum power constraint for each user, γ th is the SIR threshold constraint for each individual antenna element and we wish to determine the optimal transmit ∗ powers Pk,m . We collect the optimization variables into a K × M power matrix P having (i, j)-th element Pi,j . Assuming a fixed 2-D linear filter Xi,m , the SIR for user i, transmit element m, can be written as [8],
SIR k,m ≥ γ th γ th Pk,m Pk,m ≥ SIR k,m γ th Ik,m (P, Xk,m ) = � � 2 . H m T Gm k,k tr Xk,m Sk,m Ak,k For the moment, let us ignore the per-user maximum power constraints. We define a matrix interference function I(P) of dimension K × M having (i, m)-th element Ii,m (P) =
γ th Ii,m (P, Xi,m ) � � 2 . mT H S A X Gm tr i,m i,i i,m i,i
(13)
We now propose Algorithm 1 to solve this revised problem devoid of maximum power constraints. The convergence proof � � 2 m H mT of this algorithm is straightforward and involves showing that Pi,m Gi,i tr Xi,m Si,m Ai,i I(P) is a standard interference function. = � � 2 � PP j T 2 tr XH X Remark: The optimum solution to the power unconstrained Pk,j Gji,k tr XH S A + σ i,m k,j i,k i,m i,m (k,j)∈R problem is where all user’s SIR constraints are met with where the region R is the Cartesian product of the sets k = equality. To see this, note that if a user’s SIR threshold is {1, . . . , K} and j = {1, . . . , M } excluding the point (i, m), exceeded, that user may lower their power to meet the SIR allowing us to include the multiple-access interference from constraint with equality. This in turn affects other users who all other antenna elements of all users. We can further rewrite may also lower their power. The process continues until the optimum minimum power solution. the SIR in a more compact form, � � 2 H mT Algorithm 1 Iterative Power Control Pi,m Gm i,i tr Xi,m Si,m Ai,i (11) SIR i,m = 1: Let n = 0 Ii,m (P, Xi,m ) 2: Let P(n) = γ th σ 2 1 where the term Ii,m (·, ·) represents the multiple-access inter3: repeat ference at the base station assigned to user i: 4: P(n+1) = I(P(n) ) � � 5: Increment n XX T 2 Ii,m (P, X) = Pk,j Gji,k tr XH Sk,j Aji,k 6: until P(n) = P(n−1) (k,j)∈R 7: The optimum power matrix is P∗ = P(n) � 2 H + σ tr X X . (12) Note: 1 denotes a matrix of all elements equal 1 SIR i,m
B. Iterative Power Control Algorithm Many iterative power control algorithms (PCAs) have the form � � P(n+1) = I P(n) where P(n) is a vector of all user’s powers at the n-th iteration step and I(·) is an interference function. Proving convergence of such algorithms can be achieved by showing that I(·) in the iteration above is standard [15]. At convergence, the final power vector is the optimum minimum total sum power across all users. For convenience, we restate the definition of a standard interference function. Definition 1: Interference function I(P) is standard if for all P ≥ 0 the following properties are satisfied. • Positivity I(P) > 0.
We now consider the original problem (10) incorporating maximum power constraints. Given an optimum power matrix P∗ for the unconstrained problem above, we recall that all users SIR constraints are met with equality. It follows that the per-user sum power condition M X
Pk,m ≤ P max ,
∀k = 1, . . . , K
m=1
determines whether problem (10) is feasible. To see this, suppose that this condition is not met for a particular user i. Then we would need to clip the transmit power of user i in some way so as to not exceed the user’s maximum power. In turn, we violate one or more of the SIR constraints of the user and we conclude that the problem is infeasible. Clearly then, we could simply run Algorithm 1 without maximum power constraints, then check for feasibility at
DISTRIBUTED POWER CONTROL FOR CELLULAR MIMO SYSTEMS WITH TEMPORAL AND SPATIAL FILTERING
5
convergence. If the sum power constraints are satisfied for ∗ each user then the problem is feasible and P(n) is indeed the optimum power matrix. Obviously this scheme is not amenable to on-line operation. Alternatively, given that we are starting Algorithm 1 from a power matrix that is clearly less than any feasible solution, we can also check for feasibility at each iteration. Due to the monotonicity property of I(P), we can safely conclude that the problem is infeasible if the sum power constraints are not met at any particular iteration and terminate early. This scheme is more amenable to on-line operation. C. Soft Dropping Iterative Power Control In Section II-A we showed that the full MIMO system can be considered as a KM virtual user vector system. One could imagine that for a given processing gain η, there are fewer degrees of freedom per real user in such a MIMO system having K real users than an equivalent vector system having the same number of K real users. We conjecture that the probability of having a feasible solution is lower in the full MIMO system given the same number of real users and processing gain η. Normally, infeasible problems are avoided through call admission control, or stepwise removal algorithms to remove user(s) causing the most interference in an attempt to create a subset of users who form a feasible problem that can be solved [16], [17]. These techniques assume fixed SIR threshold QoS constraints. “Soft dropping power control” is an alternative approach that avoids having to place a hard limit on the number of users in the system [11]. The scheme reduces the level of interference in a system by dynamically reducing the SIR threshold targets of users as they increase their transmit power. This promotes a lower transmit power regime at the expense of a lower SIR (and lower QoS in terms of bit error rate for example). In this section, we extend the concept of soft dropping to the cellular MIMO system. We will assume that each of the M links for a given user i have the same SIR threshold Γth i ([Pi,1 , . . . , Pi,M ]) which is now a function of the transmit powers of that user. This means that each of the user bits transmitted from a user in the MIMO system will experience the same QoS grade. We define a surface M P ˆ Γ, Pi,m < PΓˆ m=1 M ˜ i (Pi ), P ˇ < P Pi,m < P ˇ Γth (14) Γ i (Pi ) = Γ Γ m=1 M P Γ, ˇ P > Pˇ i,m
m=1
Γ
that dictates the soft dropping power control SIR threshold T ˆ where Pi = [Pi,1 , · · · , Pi,M ] is a power vector for user i, Γ is the maximum SIR threshold when the user sum power is ˇ and P ˇ are the less than the power threshold PΓˆ , similarly Γ Γ ˜ i is a linear ratio minimum SIR and power thresholds and Γ (in dB) between the maximum and minimum thresholds (given below). Fig. 2 shows such a surface for a user having M = 2 transmit elements.
Fig. 2. Soft Dropping Thresholds for user i having M = 2 transmit elements (linear scale).
˜ i as We define Γ M X
˜ i = log10 Γ ˆ + α log10 log10 Γ
! Pi,m − log10 PΓˆ
m=1
˜i = Γ ˆ Γ
M X
!α Pi,m
PΓˆ−α
m=1
where α is the gradient of the linear slope ˆ − log10 Γ ˇ log10 Γ log10 PΓˇ − log10 PΓˆ ˆ Γ ˇ log10 Γ/ = − . log10 PΓˇ /PΓˆ
α= −
We can thus rewrite (14) as ˆ Γ, �α � M P 1 ˆ Γth (P ) = Γ Pˆ Pi,m , i i Γ m=1 ˇ Γ,
M P m=1
Pi,m < PΓˆ
PΓˇ < M P m=1
(15)
M P m=1
Pi,m < PΓˇ
Pi,m > PΓˇ
(16) We define a new interference function with the intent to replace (13) in the framework of the previous sub-section as �ρi � Γi (P) SD Pi,m Ii,m (P) = SIR i,m (P) where 0 < ρi ≤ 1 is a scaling factor that affects the convergence of such iterative algorithms having a dynamic SIR threshold target, with larger values of ρi giving faster convergence. Incorporating (11) and (16) gives M P SD A Ii,m (P), Pi,j < PΓˆ j=1 M P SD SD B Ii,m (P) = (17) Ii,m (P), PΓˇ < Pi,m < PΓˇ m=1 M P SD C Pi,j > PΓˇ Ii,m (P), j=1
6
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
where we have defined Ni,m = A
SD Ii,m (P) = B
SD Ii,m (P) = C
SD Ii,m (P) =
Ii,m (P, Xi,m ) (18) � � 2 mT H Gm i,i tr Xi,m Si,m Ai,i � �ρi ˆ i,m (19) ΓN Pi,m 1−ρi α ρi M 1 X ˆ Γ Pi,j Ni,m Pi,m 1−ρi (20) PΓˆ j=1 � ˇ i,m ρi Pi,m 1−ρi (21) ΓN
to simplify the notation. We note that the key difference between this formulation and the one given in [11] is that (17) is a function of all antenna elements of a particular user; a direct application of the results in [11] would imply that each user’s transmit elements would have a SIR threshold target solely a function of its own power and none of the adjacent elements. In this work, the common SIR threshold across a user’s transmit elements tightly couples the power allocation of each user; it is analogous to having a single SIR threshold for an entire cell in the model considered in [11]. Lemma 1 states that each component (19)–(21) are standard interference functions. Theorem 1 following states that (17) is a standard interference function that can be used as a replacement of (13) in Algorithms 1 and 3 enabling “soft dropping” power control in the previous framework. The proofs are again based on Definition 1. Lemma 1: The interference functions (19)–(21) are standard with a suitable choice of thresholds that satisfy α < 0 1 and ρi < 1−α . Proof: Positivity is immediate since all terms are positive and 0 < 1 − ρi ≤ 1. From a causal observation it can be seen that the scalability SD A SD C and positivity properties for Ii,m (P) and Ii,m (P) hold; the monotonicity property proof follows from the fact that Pi,m 1−ρi is concave in Pi,m . SD B To prove monotonicity of Ii,m (P), we first require that αρi + 1 − ρi > 0 1 . 1−α This requirement arises from requiring that the overall exponent Ψ of Pi,j Ψ is positive in (20). We also note that α ρi M X 1 SD B 0 1−ρi Ii,m (P0 ) = ˆ Γ P 0 Ni,m Pi,m PΓˆ j=1 i,j α ρi M X (a) 1 ≤ ˆ Γ P 0 Ni,m Pi,m 1−ρi PΓˆ j=1 i,j α ρi M X (b) 1 ≤ ˆ Γ Pi,j Ni,m Pi,m 1−ρi PΓˆ j=1 ρi
ˆ Γ Pi,j Ni,m (δPi,m ) i PΓˆ j=1 α ρi M X (d) 1 1−ρ > ˆ Γ δPi,j Ni,m (δPi,m ) i PΓˆ j=1 B
SD = Ii,m (δP)
where (c) follows from the concavity of ( · )1−ρi , (d) follows when αρi < 1 ensuring δ αρi is concave. The first condition is always satisfied since α < 0; the second is satisfied when 1 ρi = 1−α . SD Theorem 1: Ii,m (P) is a standard interference function that can be used as a replacement of (13) in Algorithms 1 and 3. Proof: Taking the ratio of (19) and (20) yields, A
SD Ii,m (P)
=�
1
�α+ρi P j=1 i,j !α+ρi PΓˆ = PM , j=1 Pi,j PM SD A SD B thus Ii,m (P) ≤ Ii,m (P) when j=1 Pi,j ≥ PΓˆ . Similarly, the ratio of (21) and (20) yields, � ˇ �ρi SD C Ii,m (P) 1 Γ = � �α+ρi B P ˆ SD (P) M 1 Γ Ii,m P j=1 i,j Pˆ SD B (P) Ii,m
1 PΓ ˆ
PM
Γ
but from (15), � �α ˇ PΓˇ Γ = ˆ PΓˆ Γ and so, C
SD Ii,m (P) B
SD (P) Ii,m
=
PΓˇ PM
!α+ρi
Pi,j PM SD C SD B thus Ii,m (P) ≤ Ii,m (P) when j=1 Pi,j ≥ PΓˇ . From the above inequalities we can write (17) as n n oo SD SD A SD C SD B Ii,m (P) = max Ii,m (P), min Ii,m (P), Ii,m (P) (22) and we choose 1 ρ= 1−α for fastest convergence where we’ve dropped the subscript since it does not depend on i. SD By [15, Thm 5], we conclude that Ii,m (P) is a standard interference function. j=1
DISTRIBUTED POWER CONTROL FOR CELLULAR MIMO SYSTEMS WITH TEMPORAL AND SPATIAL FILTERING
IV. J OINT P OWER C ONTROL AND T EMPORAL -S PATIAL F ILTERING In this section, we introduce the joint power control and temporal-spatial filtering problem. This forms the groundwork for developing distributed algorithms in Section V that find the globally optimal solution utilizing local measurements at each base station. A. Problem Definition We now wish to jointly find the set of minimum transmit powers Pi,m for each real user i and transmit element m, subject to the per-user constraints, while simultaneously finding the linear 2-D filters Xi,m . Following the development in [8], this problem leads to the optimization, min P
s.t.
K X M X
Algorithm 2 Iterative Joint Power Control and TemporalSpatial Filtering 1: Let n = 0. 2: Let P(n) = γ th σ 2 1 3: repeat 4: P(n+1) = J(P(n) ) 5: Increment n 6: until P(n) = P(n−1) 7: The optimum power vector is P∗ = P(n) ∗ 8: The optimum filters are X∗ i,m = Fi,m (P ), ∀i ∀m
Positivity of Ji,m (·) is immediate from the positivity of ∗ Ii,m (·, ·). To prove monotonicity we first assume Xi,m = arg min Ii,m (P, X), then we observe that X
Ji,m (P) = min Ii,m (P, X) Pk,m
(23)
k=1 m=1 max SIR k,m Xk,m M P Pk,i Pk,m
X
= Ii,m (P, X∗k,m ) (a)
≥ γ th
≥ Ii,m (P0 , X∗k,m ) ≥ min Ii,m (P0 , X) = Ji,m (P0 )
≤ P max
X
i=1
7
where (a) follows from the monotonicity property of Ii,m (·, ·). Thus Ji,m (·) satisfies the monotonicity property. To prove scalability, we note that
≥ 0 k = 1, . . . , K m = 1, . . . , M.
δJi,m (P) = min δIi,m (P, X) X
B. Iterative Power Control Algorithm Mirroring the development in Section III-B, we define an interference function Ji,m (P) = min Ii,m (P, Xi,m ) Xi,m
(24)
with J(P) a matrix function of size K × M having (i, j)-th element Ji,j (P) and Ii,m (P, X) =
γ th Ii,m (P, X) � � 2 mT HS Gm X A tr i,m i,i i,i
(25)
having the same form as (13) with the 2-D linear filter explicitly noted. We now propose Algorithm 2 to solve (23) iteratively. This algorithm is a MIMO channel extension of the existing PCA given in [8] for a vector channel. Similar remarks apply to this algorithm with regards to checking for feasibility as outlined in Section III-B. Lastly, we define the matrix function Fi,m (P) = arg min Ii,m (P, X) X
(26)
that gives the optimal 2-D filter for a given power vector P. The convergence proof for this algorithm given below; it is based heavily on the fact that Ii,m (P, X) is a standard interference function for a fixed 2-D filter X. Theorem 2: For a feasible problem, Algorithm 2 will converge to a fixed point yielding the optimal transmit powers of all users’ antenna elements and associated 2-D linear filters. Proof: We recall that for a fixed 2-D filter X, the interference function Ii,m (P, X) satisfies the positivity, scalability and monotonicity properties.
= δIi,m (P, X∗k,m ) (b)
> Ii,m (δP, X∗k,m ) > min Ii,m (δP, X) = Ji,m (δP) X
where (b) follows from the monotonicity of Ii,m (·, ·). Thus Ji,m (·) also satisfies the scalability property. Given that Ji,m (·) is a standard interference function, it follows that J(·) is also standard. C. Optimal Linear Filter Structure In the previous sub-section, the optimal 2-D filter X∗i,m was not given in closed form. It can be shown that such a filter is one that minimizes the mean squared error between the decision statistic and data bit for the desired user [8]. As implied by the previous sub-section, such a filter is also SIR maximizing. Let us first consider a set of combined temporal-spatial signatures for each user j. For each antenna element m, there may exist many such signatures: one for each base station assigned to any user i. Let us denote these temporalspatial signatures as Qm i,j . Mathematically, these are formed T by stacking the columns of Sj,m Am to form a ηN -length i,j vector. A direct application of the results from [6] (also revisited later in [8], [10] for the vector channel) will then yield the minimum mean squared error (MMSE) solution !−1 K X M q X q q q H 2 m m Pp,q Gi,p Qi,p Qi,p + σ I Qm xi = Pi,m Gi,i i,i p=1 q=1
(27)
8
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
as the optimal filter where we unstack groups of η elements ∗ of xm i to recover the columns of Xi,m . The only disadvantage of this result is that it requires a large ηN × ηN matrix inversion that is computationally expensive. We could instead consider a 2-D filter structure that belongs to a more constrained space where we avoid such large matrix inversions; for example, those having rank 1 such as the matched temporal-spatial filter XMF i,m introduced in Section III. This is the motivation behind numerous other filter structures investigated in [8], [10]. In the following subsection, we summarize the results for two selected structures, in preparation for presenting the distributed PCA results in Section V. D. Sub-Optimal Linear Filter Structures We now present a summary of two other selected filter structures given in [10] and emphasize the fact that they are optimal within their class of constrained filters. Thus the convergence proof of Theorem 2 remains the same. 1) Cascaded Temporal-Spatial MMSE: This filter structure comprises an array of N temporal filters {cni,m }N n=1 , one for each antenna element at the base station assigned to user i, followed by a single spatial filter wi,m to combine the output of the first stage filters. Each stage is designed such that they minimize the mean squared error between the output of the filter and the bit sent from user i’s m-th antenna element. This structure requires N inversions of η × η sized matrices and one inversion of a N × N sized matrix. The filter expressions are given by q m (n) Pi,m Gm i,i Ai,i ×
K X M X
Pp,q Gqi,p
q (n) 2 Ai,p Sp,q STp,q + σ 2 I
!−1 Si,m
p=1 q=1
(28)
K M 1 XX H × Pp,q Gqi,p Aqi,p Aqi,p + σ 2 I η p=1 q=1
!−1 Am i,i (31)
ci,m q = Pi,m Gm i,i ×
M K X X
!−1 ˜ q Sp,q STp,q D ˜q H Pp,q Gqi,p D i,p i,p
˜ i,m +σ N 2
p=1 q=1
˜m ×D i,i Si,m
(32)
where
The final 2-D spatial-temporal cascaded MMSE filter (STCMMSE) is given by XST-CMMSE = i,m
η X
(l)
T
l ci,m el wi,m .
(33)
l=1
wi,m q = Pi,m Gm i,i K X M X
l wi,m q (l) = Pi,m Gm i,i Si,m
� � η H m 1 H m ˜m D = diag w A , . . . , w A i,j i,m i,j i,j , i,m � � η H η 1 H 1 ˜ i,m = diag wi,m N wi,m , . . . , wi,m wi,m .
cni,m =
where en is a N × 1 vector having 1 in the n-th element and zeros elsewhere. 2) Cascaded Spatial-Temporal MMSE: This filter structure is the reverse order of the previous, with the first stage filter l being an array of η spatial filters {wi,m }ηl=1 that combine the output of each antenna for each chip sample l at the base station assigned to user i. The second stage consists of a temporal combiner ci,m . As before, each stage is designed with the MMSE criterion. This structure requires one inversion of a η × η sized matrix and one inversion of a N × N sized matrix. The filter expressions are given by
V. D ISTRIBUTED A LGORITHMS !−1
This paper has introduced several power control algorithms thus far. As stated, they all require global knowledge of all p=1 q=1 channel gains, spatial and temporal sequences in the cell m ×Dm (29) i,i Ai,i landscape. Furthermore, the optimal powers for all users are computed together with a centralized controller. where � � Ideally, we would like a distributed algorithm such that T T 1 N Dm i,j = diag ci,m Sj,m , . . . , ci,m Sj,m , each base station may independently compute the globally � � T N T optimum powers for each user within their designated cell. Ni,m = diag c1i,m c1i,m , . . . , cN c i,m i,m In this section, we show how all of the PCAs introduced in and diag(. . . ) denotes a block diagonal matrix with the ele- this paper may be decentralized using local measurements at each base station. ments specified. The final 2-D temporal-spatial cascaded MMSE (TSCMMSE) filter is given by A. Conventional Power Control N X (n) We first establish that the power control Algorithm 1 may XTS-CMMSE = wi,m cni,m eTn (30) i,m be implemented using only local measurements. First note that n=1 ×
H
T
Pp,q Gqi,p Dqi,q Aqi,p Aqi,p Dqi,q + σ 2 Ni,m
DISTRIBUTED POWER CONTROL FOR CELLULAR MIMO SYSTEMS WITH TEMPORAL AND SPATIAL FILTERING
for a given 2-D filter X, the received signal after filtering (6) can be written as � yi,m (X) = tr XH Ri K X M q � � X T Pk,j Gji,k Bk,j tr XH Sk,j Aji,k = k=1 j=1
� + tr XH Ni . The received power is then K X M � � X � 2 � T 2 E yi,m (X) = Pk,j Gji,k tr XH Sk,j Aji,k k=1 j=1 2
+ σ tr XH X
�
(34)
where we have made use of the covariance of Ni given by (5) and the assumption that each user bit Bk,m is independent and equally likely. We can now rewrite the total received multiple-access interference at the base station assigned to user i (12) as � 2 � Ii,m (P, X) = E yi,m (X) � � 2 H mT − Pi,m Gm . i,i tr X Si,m Ai,i Remark: This expression is a measurement of the multipleaccess To obtain it, an estimate the expectation � 2 interference. � E yi,m (X) must first be acquired. This can be achieved by 2 taking a sample average of yi,m (X) over multiple bit intervals. We will see similar expectations appearing in the following sub-sections where similar remarks apply. Finally, we can then rewrite (13) as � 2 � E yi,m (X) Ii,m (P) = γ th � � 2 − Pi,m (35) mT H Gm i,i tr X Si,m Ai,i where it only depends on the powers, channel gains and temporal-spatial signatures of user i. This implies that if each user updated their transmit power in real-time with each iteration of step 4 in Algorithm 1, then all users will converge to the optimal solution. Furthermore, one could imagine that should the iteration be constantly running in a closed-loop power control fashion, that such an iteration would track changes in the channel state as long as the problem is feasible under all channel realizations.
9
C. Joint Power Control and Temporal-Spatial Filtering In similar fashion to Section V-A, it is straightforward to show that we can also express (25) as a function of only the powers, channel gains and temporal-spatial signatures of user i. We now show that the filter structures outlined in Sections IV-C and IV-D can be found using only local measurements. 1) Optimal Linear Filter Structure: A simple exercise can m mH reveal that the matrix Qm given in (27) may i,j = Qi,j Qi,j be expressed in block form where the (p, q)-th sub-block of size η × η is given by (p,q) (p) m ∗ Qm = Am Ai,j i,j i,j
(q)
Sj,m STj,m
and the entire block matrix is of size ηN × ηN . From (4) observe that � � (m) (n) H E zi zi =
K X M X
Pp,q Gqi,p Aqi,p
(m)
Aqi,p
(n) ∗
Sp,q STp,q + Nm,n
p=1 q=1
=
M K X X
Pp,q Gqi,p Qqi,p
(m,n)
+ Nm,n
p=1 q=1 (m,n)
= Zi
� m nH � where Nm,n = E n ˜i n ˜i is a η × η matrix having (p, q)-th element σ 2 δnm δpq , � 1, k = l, δkl = 0, k 6= l. Let us define Zi as a ηN ×ηN block matrix with sub-blocks (m,n) Zi . It then follows that the inverted matrix term appearing in (27) can be rewritten as M K X X
Pp,q Gqi,p Qqi,p + σ 2 I = Zi
p=1 q=1
and can be measured from (3). Thus Algorithm 2 can be distributed for the optimal linear filter structure as it only depends on local information regarding user i. 2) Sub-Optimal Cascaded Temporal-Spatial MMSE Filter Structure: We observe that the inverted matrix term appearing in (28) can be rewritten as K X M 2 X (n) Pp,q Gqi,p Aqi,p Sp,q STp,q + σ 2 I p=1 q=1
=
K X M X
Pp,q Gqi,p Aqi,p
(n)
Aqi,p
(n) ∗
Sp,q STp,q + σ 2 I
p=1 q=1
B. Soft Dropping Power Control To show that the soft dropping power control scheme of Section III-C can also be distributed using local measurements we note that (18) can be rewritten as Ii,m /γ th which can be measured from (35). It follows that (17) can be computed from only local information known about user i at their assigned base station. Thus soft dropping can be incorporated into any of the decentralized algorithms in this paper.
� � (n) (n) H = E zi zi and can also be measured from (3). We now partition the inverted matrix term appearing in (29) as K X M X
H
T
Pp,q Gqi,p Dqi,q Aqi,p Aqi,p Dqi,q + σ 2 Ni,m
p=1 q=1
= C Ti,m
(K M XX p=1 q=1
) Pp,q Gqi,p Mqi,p
+ σ 2 I C i,m
(36)
10
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
where
It follows that (37) becomes WH i,m Σi W i,m
T m mH Mm i,j = S j,m Ai,j Ai,j S j,m , � C i,m = diag c1i,m , . . . , cN i,m , , S j,m = diag (Sj,m , . . . , Sj,m , ) . m It can be shown that Mm i,j = Qi,j and so (36) becomes ) (K M XX C Ti,m Pp,q Gqi,p Qqi,p + σ 2 Ni,m C i,m p=1 q=1
= C Ti,m Zi C i,m and thus can be measured from (3). Thus Algorithm 2 can be distributed for the cascaded temporal-spatial linear filter structure as it only depends on local information regarding user i. 3) Sub-Optimal Cascaded Spatial-Temporal MMSE Filter Structure: From (2) observe that � � (m) (n) H E ri ri =
K X M X
H (m) (n) Pp,q Gqi,p Aqi,p Aqi,p Sp,q Sp,q
+ Nm,n
and can also be measured from (3). We finally conclude that Algorithm 2 can be distributed for the cascaded spatialtemporal linear filter structure as it only depends on local information regarding user i. D. Improved Power Control Algorithms The real time convergence of these measurement based algorithms depend on how quickly measurements can be taken. By reducing the number of measurements required, we can effectively decrease the real time taken for the algorithms to converge. Let K X M � � X T 2 Ui,m (P) = Pk,j Gji,k tr XH Sk,j Aji,k k=1 k6=i
j=1
+ σ 2 tr XH X
M � � � 2 � X T 2 = E yi,m (X) − Pi,j Gji,i tr XH Si,j Aji,i , j=1
p=1 q=1
=
K M 1 XX H Pp,q Gqi,p Aqi,p Aqi,p + Nm,n η p=1 q=1
=
(m,n) Σi
� � nH where Nm,n = E nm is a N × N matrix having (p, q)i ni th element σ 2 δnm δpq and we define Σi as a ηN × ηN block (m,n) matrix with sub-blocks Σi . Thus the inverted matrix term appearing in (31) can be written as K M 1 XX H (l,l) Pp,q Gqi,p Aqi,p Aqi,p + σ 2 I = Σi η p=1 q=1
and can be measured from (3). We now partition the inverted matrix term appearing in (32) as K X M X
˜ q Sp,q STp,q D ˜ q H + σ2 N ˜ i,m Pp,q Gqi,p D i,p i,p
p=1 q=1
= WH i,m
�
(K M XX
q
)
˜ i,p + σ 2 I W i,m (37) Pp,q Gqi,p M
p=1 q=1
where m mH T ˜m M i,j = Ai,j Sj,m Sj,m Ai,j , η � 1 W i,m = diag wi,m , . . . , wi,m , � m m m Ai,j = diag Ai,j , . . . , Ai,j .
˜m It can be shown that M i,j can be expressed in block form where the (p, q)-th sub-block of size N × N is given by 1 (p) (q) (p,q) mH ˜m Am H M = Sj,m Sj,m Am = Am i,j i,j Ai,j η i,j i,j and the entire block matrix is of size ηN × ηN .
U i (P) = [Ui,1 (P), . . . , Ui,M (P)] be a function that represents the receiver noise plus interference from all users other than the desired user i, after passing through the 2-D receive filter X. Now define a new interference function h i ˆ Ii (P, U) = Iˆi,1 (P, U1 ), . . . , Iˆi,M (P, UM ) with elements Iˆi,m (P, U) U+ = γ th
M P j=1 j6=m
� � T 2 Pi,j Gji,i tr XH Si,j Aji,i
� � 2 mT H Gm i,i tr X Si,m Ai,i
,
where U is a M -length vector of interference measurements. Remark: We can rewrite (13) as Ii,m (P) = Iˆi,m (P, Ui,m (P)) where it depends only on the powers of user i and the measured interference from all other users. Lastly, we shall define ˆ I∗i (P, U) as a vector function yielding the fixed point solution of ˆ I∗i = ˆ Ii (P [P] =ˆI∗ , U). i
i
The convergence proof for Algorithm 3 is based on showing that ˆ I∗i (P, U) is a standard interference function. Due to the asynchronous nature of power updates, the proof is completed with the result of [15, Thm. 4]. The proof is straightforward and is omitted due to space limitations. We note that in this improved algorithm, the number of measurements are reduced at step 5: M measurements are taken per user before a number of inner iterations are performed to
DISTRIBUTED POWER CONTROL FOR CELLULAR MIMO SYSTEMS WITH TEMPORAL AND SPATIAL FILTERING
Algorithm 3 Iterative Power Control (Improved) 1: Let n = 0 2: Let P(n) = γ th σ 2 1 3: repeat 4: for� all users . , K do � i = ∗1, . .(n) 5: Ii (P , U i (P)) P(n+1) i = ˆ 6: end for 7: Increment n 8: until P(n) = P(n−1) 9: The optimum power matrix is P∗ = P(n)
11
Average transmitter power per user (W)
1
0.8
0.6
0.4
0.2
Mobile Station Base Station
0 1
MF (Soft) MF
5
500
15
20 25 30 35 Iteration number
40
45
50
0.12
0
−500
−1000 −1000
10
(a) Matched Filter (MF) PCA
Average transmitter power per user (W)
Y direction (metres)
1000
0.1
0.08 0.06
−500
0 500 X direction (metres)
1000
Fig. 3. Simulated cell landscape with K = 40 users, M = 2, N = 3 and η = 16. Solid lines denote the user base station assignment.
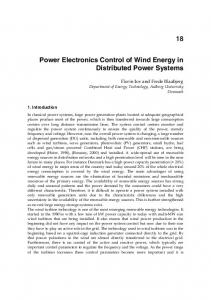
find the fixed point. In comparison, M measurements per user are taken on each iteration of the original Algorithm 1. It can be shown that similar developments hold for reducing the number of measurements in distributed updates of the 2D linear receiver structures of Section V-C. Thus Algorithm 3 can be modified to incorporate the joint power and filter updates and is omitted due to space limitations. VI. S IMULATION R ESULTS The following simulations consider a 2 × 2 grid of cells having a total of four base stations within a 2 km square area and K = 40 users randomly placed according to a uniform distribution. A processing gain η = 16 is selected while temporal √ sequences are randomly chosen with elements (l) Si,m = ±1/ 16 having equal probability of sign. AWGN power equal σ 2 = 10−13 W is assumed. Our simulated fading environment assumes a distance dependent loss (exponent 4) superimposed by log normal shadowing (zero mean, 8 dB variance) between each user and base station antenna element pair. Once chosen, these gains remain fixed. We further assume antenna elements of each user and base station are omni-directional and are arranged in a linear array with half-wavelength separation [8], [18]. We assume an operational center frequency of 1.95 GHz. Users are assigned to the base station that has the highest average channel gain. Fig. 3 summarizes the cell landscape and base station assignment realization used in the following simulations.
0.04 O−MMSE (Soft) TS−CMMSE (Soft) ST−CMMSE (Soft) O−MMSE TS−CMMSE ST−CMMSE
0.02 0 1
5
10
15
20 25 30 Iteration number
35
40
45
(b) Optimal (O-MMSE), Cascaded Spatial-Temporal (ST-CMMSE), Cascaded Temporal-Spatial (TS-CMMSE) PCAs Fig. 4. Average transmitter power per user vs. iteration step for Algorithm 2 with and without soft dropping power control.
Each user is assumed to have a target SIR threshold of 8 dB. Where soft power control is implemented, the maximum and minimum SIR thresholds are chosen as {8, 6} dB at user sum powers {250, 750} mW respectively. Users are also assumed to have a maximum power constraint of 1 W. Fig. 4 shows the total transmitter power across the cell landscape as a function of the iteration step for Algorithm 2 having implemented the optimal (O-MMSE), cascaded temporal-spatial (TS-CMMSE), cascaded spatialtemporal (ST-CMMSE) and matched filters (MF) respectively. To deal with infeasible simulated realizations, we opt to clip user transmit powers rather than declare infeasibility. Although not the focus of this paper, there are many ways in which the clipping operation may be implemented. In these simulations, we choose to clip a user’s power to their maximum level if an iteration would otherwise yield an infeasible power vector Pi = [Pi,1 , . . . , Pi,M ] where kPi k1 > P max . We simply scale each element of the power vector such that P0i = P max Pi /kPi k2 is the next power vector used in the iteration, regardless if it meets the SIR constraints of the particular user i.
12
PROCEEDINGS 5TH AUSTRALIAN COMMUNICATION THEORY WORKSHOP 2004
We clearly see that the soft-dropping power control algorithm reduces the total power consumption in the cell landscape. This implies that we may increase the number of users admitted to the network to the point where we consume the same overall power across the landscape as compared to the non-soft dropping power control regime. The trade-off is of course a reduced QoS for each user. (a) With Soft Dropping Algorithm O-MMSE TS-CMMSE ST-CMMSE MF
Average SIR 7.975 dB 7.963 dB 7.908 dB 3.268 dB
Algorithm O-MMSE TS-CMMSE ST-CMMSE MF
Average SIR 8.000 dB 8.000 dB 7.944 dB 3.466 dB
Average SIRth 7.975 dB 7.963 dB 7.920 dB 6.251 dB
Users meeting SIRth 100.0% 100.0% 97.5% 30.0%
(b) Without Soft Dropping Average SIRth 8.000 dB 8.000 dB 8.000 dB 8.000 dB
extended to the MIMO system in order to provide additional degrees of freedom in the system, with the option of admitting more users into the network at the expense of a lower quality of service. The optimal linear receiver filter was observed to be computationally expensive and thus two sub-optimal linear filters were considered, being cascaded filters in each of the spatial and temporal domains. Importantly, this paper has shown that these iterative algorithms can be implemented in a distributed fashion, using only local measurements at each base station receiver, yet still yielding the globally optimum result.
R EFERENCES Users meeting SIRth 100.0% 100.0% 97.5% 7.5%
TABLE I P OWER C ONTROL A LGORITHM P ERFORMANCE S UMMARY.
To quantify the loss of service quality due to soft dropping, Table I shows the average SIR and soft-dropping SIR targets of each user. In addition, we also show the percentage of users satisfying their SIR constraint at convergence to quantify just ‘how close’ the system was to supporting all users when the problem is infeasible under the outlined clipping scheme. An obvious area of research is to investigate various clipping (or user removal) methods to maximize the probability of feasibility (for example, see [16], [17] for some ideas from single antenna systems). We clearly see that the problem became infeasible when utilizing the matched- and spatial-temporal cascaded filters. As a result, many users hit their maximum power rating of 1 W and were unable to meet their SIR constraints. Compared with the feasible problems using other filter structures, we can see that the failure is due to the fact that both filters ST-CMMSE XMF are only of rank 1 and do not have sufficient i,m , Xi,m degrees of freedom to suppress interfering users. However, with careful selection of the soft dropping thresholds, we may reduce the target SIR thresholds further to transform these problems into ones that are feasible. VII. C ONCLUSION In this paper, we have extended results for joint power control and temporal-spatial filtering to the cellular MIMO system. We have shown that in this context, a virtual user mapping can be made to the vector channel, with additional constraints on groups of these virtual users that relate back to real users of the original MIMO system. We have derived conceptually simple iterative algorithms to solve the conventional power control problem without optimizing user filters, then extended the development to the full joint optimization. In addition, the concept of soft dropping was
[1] A. F. Naguib, A. Paulraj, and T. Kailath, “Capacity improvement with base-station antenna arrays in cellular CDMA,” IEEE Transactions on Vehicular Technology, vol. 43, pp. 691–698, Aug. 1994. [2] B. D. Van Veen and K. M. Buckley, “Beamforming: a versatile approach to spatial filtering,” ASSP Magazine, IEEE, pp. 4–24, Apr. 1988. [3] J. Winters, J. Salz, and R. D. Gitlin, “Impact of antenna diversity on the capacity of wireless communication systems,” IEEE Transactions on Communications, vol. 42, pp. 1740–1751, Feb/Mar/Apr 1994. [4] S. Verd´u, Multiuser detection. Cambridge, New York, USA: Cambridge University Press, 1998. [5] U. Madhow and M. L. Honig, “MMSE interference suppression for direct-sequence spread-spectrum CDMA,” IEEE Transactions on Communications, vol. 42, no. 12, pp. 3178–3188, 1994. [6] S. Ulukus and R. D. Yates, “Adaptive power control and MMSE interference suppression,” Wireless Networks, Special Issue on Multiuser Detection in Wireless Communications, vol. 4, no. 6, pp. 489–496, 1997. [7] A. F. Almutairi, S. L. Miller, H. A. Latchman, and T. F. Wong, “Power control algorithm for MMSE receiver based CDMA systems,” IEEE Communications Letters, vol. 4, no. 11, pp. 346–348, 2000. [8] A. Yener, R. D. Yates, and S. Ulukus, “Interference management for CDMA systems through power control, multiuser detection, and beamforming,” IEEE Transactions on Communications, vol. 49, pp. 1227– 1239, July 2001. [9] J. Papandriopoulos, J. Evans, and S. Dey, “Optimal power control for Rayleigh-faded multiuser systems with outage constraints,” IEEE Transactions on Wireless Communications, 2003, submitted. [10] A. Yener, R. D. Yates, and S. Ulukus, “Combined multiuser detection and beamforming for CDMA systems: Filter structures,” IEEE Transactions on Vehicular Technology, vol. 51, pp. 1087–1095, Sept. 2002. [11] R. D. Yates, S. Gupta, C. Rose, and S. Sohn, “Soft dropping power control,” in Vehicular Technology Conference, vol. 3, (Phoenix, AZ, U.S.A.), pp. 1694–1698, May 1997. [12] S. A. Grandhi, R. Vijayan, D. J. Goodman, and J. Zander, “Centralized power control in cellular radio systems,” IEEE Transactions on Vehicular Technology, vol. 42, pp. 466–468, Nov. 1993. [13] G. J. Foschini and Z. Miljanic, “A simple distributed autonomous power control algorithm and its convergence,” IEEE Transactions on Vehicular Technology, pp. 541–646, 1993. [14] S. Grandhi, J. Zander, and R. Yates, “Constrained power control,” International Journal of Wireless Personal Communications, vol. 1, no. 4, 1995. [15] R. D. Yates, “A framework for uplink power control in cellular radio systems,” IEEE Journal on Selected Areas in Communications, vol. 13, no. 7, pp. 1341–1347, 1995. [16] J. Zander, “Performance of optimum transmitter power control in cellular radio systems,” IEEE Transactions on Vehicular Technology, vol. 41, pp. 57–62, Feb. 1992. [17] Q. Wu, “Performance of optimum transmitter power control in CDMA cellular mobile systems,” IEEE Transactions on Vehicular Technology, vol. 48, pp. 571–575, Mar. 1999. [18] X. Wang and H. V. Poor, “Space-time multiuser detection in multipath CDMA channels,” IEEE Transactions on Signal Processing, vol. 47, pp. 2356–2374, Sept. 1999.