ABSTRACT. Data-Aided Signal-to-Noise-Ratio (SNR) estimation is considered for time selective fading channels whose time variation is described.
DATA-AIDED SIGNAL-TO-NOISE-RATIO ESTIMATION IN TIME SELECTIVE FADING CHANNELS Ami Wiesel, Jason Goldberg and Hagit Messer Tel Aviv University, Department of Electrical Engineering–Systems Tel Aviv 69978, Israel, Tel: +972 3 640 8119, Fax: + 972 3 640 7095 EMAIL: {amiw,jason,messer}@eng.tau.ac.il ABSTRACT Data-Aided Signal-to-Noise-Ratio (SNR) estimation is considered for time selective fading channels whose time variation is described by a polynomial time model. The inherent estimation accuracy limitations associated with the problem are quantified via a CramerRao Bound analysis. A maximum likelihood type class of estimators is proposed and its exact, non-asymptotic performance is computed. The standard, constant channel SNR estimator performance is determined in the presence of channel polynomial order mismatch. Simulations results are presented which verify the effectiveness of the technique as well as its performance advantage over previously proposed methods. 1. INTRODUCTION Modern wireless communication systems often require knowledge of the receiver signal-to-noise-ratio (SNR). For example, SNR estimates are typically employed in power control, mobile assisted hand-off, adaptive modulation schemes, as well as soft decoding procedures, e.g., [1]-[2]. A variety SNR estimators have appeared in the literature, e.g. [3] and references therein. One well-known approach is the maximum likelihood (ML) estimator of [4]-[5]. All of these estimators are based on the assumption that the channel is constant throughout the observation period. In many application, e.g. mobile communication, this assumption is not true [6]. In this paper, we will deal with the problem of SNR estimation in time selective channels. The outline of this paper is as follows: Section 2 introduces two different time selective channel models. Next, in section 3 the definition of SNR is considered. The inherent estimation accuracy limitations are explored in section 4. A novel class of estimators suited to time selective channel is derived in section 5. Performance of the estimators under the correct model is examined in section 6, while the performance in the presence of model mismatch is addressed in section 7. Simulation results are given in section 8. Conclusions are offered in section 9. 2. CHANNEL MODEL Consider a discrete time, complex baseband representation of a received communication signal, subject to flat fading:
where at the time index n, yn is a received signal, an is a known transmitted signal, hn is a slowly time varying channel gain, and wn is a realization of a zero mean white Gaussian random process 2 of variance σw . These samples can be conveniently represented in N × 1 column vector form y = Ah + w,
where y ≡ [y1 · · · yN ] , h ≡ [h1 · · · hN ] , w ≡ [w1 · · · wN ]T , and [·]T denotes the transpose operator. The N × N matrix A is a diagonal matrix with Ann = an . There are different statistical models in the literature for the channel h. The most common is Clarke’s model, e.g. [6], in which the process hn is a realization of a zero mean complex normal random process, giving rise to Rayleigh amplitude fading with the following correlation function E [hn h∗n−l ]
n = 1 · · · N,
=
σh2 J0
� 2π
fd l fs
� ,
(3)
M −1
hn
=
X
αm tm n + RM (n),
(4)
m=0
where αk are complex normal random variables, tn is the time index of the n’th sample, and RM (n) is the remainder of the Taylor series. The mean square value of RM (n) → 0 as M → ∞ or as fd N → 0. For M sufficiently high, the channel h can be easily fs formulated as h ≈ TM αM , where
(1) TM
This work was supported in part by the Israeli Science Foundation founded by the Academy of Sciences and Humanities.
T
where E [·] denotes the expectation operator, [·]∗ denotes the conjugate operator, fd is the maximum Doppler frequency, fs is the sampling rate, and J0 (·) is the zero’th order Bessel function. Most data aided applications choose N such that ffds N � 1, i.e. the channel is highly correlated and almost constant during the observation interval. The channel is modeled as hn = α0 where α0 is a constant channel gain. As will be seen in the sequel, even small channel variations from this model, can dramatically degrade the performance of traditional constant channel SNR estimators. A more appropriate time selective channel model is the polynomial in time model, e.g. [7], [8]. The slowly time varying h process is by definition band limited. Therefore, it can be expanded as a polynomial in time, using Taylor’s theorem:
yn = an hn + wn
(2)
T
1 1 = .. . 1
t1 t2 .. . tN
··· ··· .. . ···
−1 tM 1 M −1 t2 .. . M −1 tN
αM =
α0 .. . αM −1
. (5)
Hence, the observations may be expressed as y = ATM αM + w. If, for convenience, the αm coefficients are considered deterministic unknown parameters, y is complex normal: y
2 CN ATM αM , σw I ,
�
∼
(6)
5. SNR ESTIMATORS This section considers a class of maximum likelihood (ML) type SNR estimators for the time selective channel model. These estimators choose the parameter values that maximize the likelihood function:
where CN (µ, Σ) denotes a complex normal distribution with a mean vector µ and a covariance matrix Σ, and I is an N × N identity matrix. The previous constant channel model is a special case of the polynomial in time model when M = 1. 3. PROBLEM FORMULATION The SNR estimation problem may be stated as: given the observation vector y, along with its statistical model, estimate the SNR defined by ρ
=
h
T
2 θbE = α cE , σc w
iT
=
arg max f (y; θE ), θE
where f (y; θE ) is the likelihood function for the E’th order channel model. Note that when E 6= M , a model order mismatch is present. Herein, we assume that the estimator is designed for the correct model (E = M = K). The effect of model order mismatch will be dealt with in section 7. The estimate θbE is used to estimate the SNR according to H
hH AH Ah , 2 N σw
ρbE
(7)
where [·]H denotes the conjugate transpose operator. Alternatively, the SNR can be defined in decibels (dB): ρ(dB) = 10 log ρ. Hereafter, the subscript [·](dB) will denote quantities in dB. αH TH AH AT
α
Under the polynomial model, ρ = M M N σ2 M M is a w deterministic unknown parameter. A special case of this problem is when M = 1, i.e. the time invariant channel, in which SNR is α2 defined as ρ = σ20 (assuming that |an |2 = 1). There are many w references to the estimation of this parameter in the literature, e.g. [3].
(11)
=
H cE α cE TH E A ATE α
=
2 c Nσ w
y H PE y , y H P⊥ Ey
(12)
where P and P⊥ are projection matrices projecting onto the rank E “signal” and rank N − E “noise” sub-spaces, respectively: H PE ≡ ATE TH E A ATE
�−1
P⊥ E ≡ I − PE . (13)
H TH EA ,
Here too, the special constant channel case, where E = 1 is thoroughly investigated in the literature, e.g. [3]. As will be seen in the sequel, the SNR estimator is biased. In order to reduce this bias, the first moment of the estimator is now derived. It can be shown that the estimator is a ratio of two independent chi squared random variables:
4. PERFORMANCE LIMITATIONS
�q The Cramer Rao Bound (CRB) is a lower bound for the MSE of any unbiased estimator of a deterministic unknown parameter satisfying a number of regularity conditions, e.g. [9]. In our estmation problem, the CRB can be expressed as:
�
2
E (ρ − ρb)
�
�
∂ 2 f (y; θ) ∂ρ H ≥ CRB ≡ E ∂θ ∂θ∂θ T
�−1
∂ρ , ∂θ
(8)
2 T where θ = [Re{αM }T Im{αM }T σw ] , and Re{·} and Im{·} denote the real and imaginary parts of a complex number respectively. Straight-forward calculations yield:
CRB(ρ) =
2ρ ρ2 + N N
∀
M ≤ N.
(9)
For the special case of M = 1, the CRB has been previously published [3]. The general M CRB is quite surprising in the sense that performance does not depend on the number of unknown parameters (2M + 1). This implies that there is no inherent penalty in asymptotic performance incurred by over estimating M . Most engineering applications are more interested in the estimator in dB. The CRB(dB) is a normalization of CRB [10]: E
h
ρ(dB) − ρb(dB)
�2 i
≥ CRB(dB) =
100 CRB(ρ) . (10) ρ2 [ln(10)]2
ρbE
=
�q
2 2 σw 2 2 σw
y y
�H �H
PE P⊥ E
�q �q
2 2 σw
y
2 2 σw
y
� χ2 (2N ρ)
2K ,(14) � ∼ χ2 2N −2K (0)
where χ2ν (λ) denotes a non central chi distributed random variable with ν degrees of freedom and noncentrality parameter λ, e.g. [11]. Therefore, the estimator is a scaled non central F random variable: 2N − 2K ρb ∼ 2K
F2K,2N −2K (2N ρ) .
(15)
Using the first moment of the non central F distribution, e.g. [11], an unbiased (UB) estimator can be derived: ρbU B =
N −K −1 K ρb − . N N
(16)
The estimate ρb is always positive, as SNR estimates should be. However, once the bias is removed, ρbU B can be negative. To deal with this problem, we assume that ρmin > 0 is the minimum possible SNR, and define:
� ρeU B =
ρbU B ρmin
ρbU B ≥ ρmin . ρbU B < ρmin
(17)
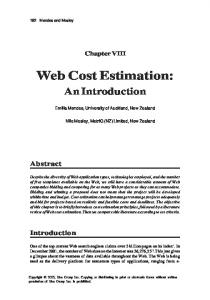
Mismatch Performace N=20, ρ = 10
6. PERFORMANCE 6
As stated at the previous section, ρb under the correct model, is a scaled non central F random variable. Therefore, the MSE (and variance) of the unbiased estimator ρbU B can be derived, e.g. [11]: MSE
(K + N ρ)2 + (K + 2N ρ) (N − K − 1) . (18) N 2 (N − K − 2)
=
It is easy to verify that asymptotically (as long as K � N ) the MSE attains the CRB as expected:
RMSE2 BIAS1 STD1 RMSE1
5 4 3 2 1
MSE
N →∞
−→
2ρ ρ2 + = CRB. N N
(19)
Examining the derivative of the MSE with respect to K: 2
∂MSE ∂K
2 2
−1 0
2
N − 3N + 2 + N ρ + 2N ρ − 2N ρ ≥ 0, N 2 (N − K − 2)2
=
reveals that the derivative is positive for any N > 3. Therefore, increasing K, increases the MSE. However, as previously stated, asymptotically, this increase is negligible: lim
N →∞
∂MSE 1 = lim = 0. N →∞ N 2 ∂K
(20)
7. PERFORMANCE UNDER CHANNEL MODEL ORDER MISMATCH The performance results of the previous section hold only if the estimator has exact prior knowledge of the channel model order and uses the same model order for the estimation, i.e. E = M . In this section, the performance of the SNR estimator under channel model order mismatch will be evaluated. This question will give insight as to which E should be selected when choosing an estimator for a real time selective channel. When the estimator is based on a higher model order than the true model order (E > M ), most of the results still hold. The estimator is still a scaled non central F random variable, only with a different scale and different degrees of freedom. As long as E � N , one does not lose by using a higher E than necessary. The more interesting question is how the estimator behaves when the model order is under-estimated (E < M ). In this case, both the numerator and denominator of the estimator are non central chi squared random variables. Therefore, the estimator is a scaled doubly non central F random variable [12]: 2N − 2E ρb ∼ 2E
F2E,2N −2E (2N η, 2N ρ − 2N η) , (21)
−1 H H H αH TH AH ATE (TH TE A ATM αM E A ATE ) where η = M M . The 2 N σw moments of a doubly non central z ∼ Fν1 ,ν2 (λ1 , λ2 ) random variable are [13]:
E [z] E z2
� �
=
� � λ2 ν � e− 2 Γ 22 − 1 ν ν λ � F 2 − 1, 2 , 2 [ν1 + λ1 ] ν 2 2 2 2 2 Γ 2
=
�
2ν1 + 4λ1 + (ν1 + λ1 )2
�
� � λ2 ν � e− 2 Γ 22 − 2 ν2 ν2 λ2 � · F − 2, , , 4 2 2 2 Γ ν2
0
(22)
0.02
0.04 0.06 Mismatch coefficient (β)
0.08
0.1
Fig. 1. Performance under channel model order mismatch.
where Γ (·) is the Gamma function and F (·, ·, ·) is the hyper geometric function, e.g. [14]. For example, let us examine the performance of an underestimated E = 1 estimator for a true channel model order of M = 2. For simplicity, we shall assume (unit) constant modulus signal component, where AH A = I and choose T such that 2 2 TH 2 T2 = N I. In addition, we define σw = 1, |α1 | = (1 − β)ρ 2 and |α2 | = βρ, where 0 ≤ β ≤ 1 is a mismatch parameter which divides the energy between the two coefficients. When β = 0 there is no model mismatch. Under these assumptions, η = (1 − β)ρ. For comparison, the correct model order estimator, where E = 2 has no model mismatch and does not depend on β. The theoretical bias, standard deviation (STD) and root mean squared errors (RMSE) of these estimators, for N = 20 and ρ = 10dB, is plotted in Fig. 1. In general, the use of a mismatched estimator degrades performance. The model order error causes a severe bias, and although there is a decrease in variance, the total mean squared error increases. This performance degradation increases as the mismatch parameter β increases. As the SNR increases, the mismatch effect is more significant. This is expected, since when the SNR increases, the model error dominates the additive noise. When the mismatch parameter is very low, and in particular when β = 0, the estimator ρ1 becomes the correct estimator and therefore is slightly better. However, if N � E, this difference is negligible. 8. SIMULATIONS In this section, we evaluate performance using simulations. All the previous results hold only for the deterministic time selective channel model, and not for the more appropriate Clarke’s channel model. In addition, the performance has been evaluated through (dB) the statistics of the error in ρb and not the error in ρeU B , which is more interesting. In this section, we will address these last two issues, using Monte-Carlo simulations. We examine the proposed estimators RMSE in a Clarke’s channel model when compared to the CRB. As previously stated, the CRB is a lower bound for the MSE of a deterministic unknown SNR. In Clarke’s model, the SNR is a random variable. Therefore, in the simulations, we generate random channels with Clarke’s
N= 20 fd= 20 fs= 25000
N= 20 fd= 200 fs= 25000
8
8
ρ1 ρ 2 ρ3
7 6
6
CRB
CRB
5 RMSE
RMSE
5 4
4
3
3
2
2
1
1
0 0
ρ1 ρ 2 ρ3
7
5
10
15 10 log10 ρ
20
25
0 0
30
5
10
15 10 log10 ρ
20
25
30
Fig. 2. RMSE for Clarke’s model. fd = 20Hz
Fig. 3. RMSE for Clarke’s model. fd = 200Hz
correlation function, but then normalize them to yield a constant desired SNR1 . Mathematically, we compare
[3] D. R. Pauluzzi and N. C. Beaulieu, “A comparison of SNR estimation techniques for the AWGN channel,” IEEE Transactions on Communications, vol. 48, no. 10, pp. 1681–1691, October 2000. [4] R. B. Kerr, “On signal and noise level estimation in a coherent PCM channel,” IEEE Transactions on Aerospace and Electronics System, vol. 2, pp. 450–454, July 1966. [5] R. M. Gagliardi and C. M. Thomas, “PCM data reliability monitoring through estimation of signal-to-noise ratio,” IEEE Transactions on Communications, vol. 16, pp. 479– 486, June 1968. [6] G. L. Stuber, Principles of Mobile Communication, Kluwer Academic Publishers, 1996. [7] D. K. Borah and B. D. Hart, “A robust receiver structure for time-varying, frequency-flat, rayleigh fading channels,” IEEE Transactions on Communications, vol. 47, no. 3, pp. 360–364, March 1999. [8] C. Anton-Haro, J. A. R. Fonollosa, C. Fauli, and J. R. Fonollosa, “On the inclusion of channel’s time dependence in a hidden markov model for blind channel estimation,” IEEE Transactions on Vehicular Technology, vol. 50, no. 3, pp. 867–873, May 2001. [9] S. M. Kay, Fundamentals of Statistical Signal Processing Estimation Theory, Prentice Hall, 1993. [10] N. S. Alagha, “Cramer-Rao bounds of SNR estimates for BPSK and QPSK modulated signals,” IEEE Communications Letters, vol. 5, no. 1, pp. 10–12, January 2001. [11] N. L. Johnson and S. Kotz, Distributions in Statistics - Continuous Univariate Distributions - 2, Houghton Mifflin Company, 1970. [12] R. Price, “Some non-central F distributions expressed in closed form,” Biometrika, vol. 51, no. 1-2, pp. 107–122, 1964. [13] A. Wiesel, J. Goldberg, and H. Messer, “Signal to noise ratio estimation in frequency selective time varying channels,” in preparation. [14] M. R. Spiegel, Mathematical Handbook of Formulas and Tables, McGraw Hill, 1990.
E
��
(dB)
ρ(dB) − ρeU B
� �2 ρe(dB) = r UB
(23)
with CRB(r) at different r’s. We repeated the simulations for different number of symbols and maximum Doppler frequencies. Results show that as ffds N increases, the E = 2 and E = 3 estimators outperform the E = 1 estimator, and are slightly higher than the CRB. This is especially true at high SNR, when the model error dominates the noise and introduces a severe bias. At low SNR, the E = 1 estimator slightly outperforms the others, since it has fewer parameters to estimate. Some sample results are shown in Fig. 2 and 3. 9. CONCLUSIONS This paper has considered the problem of SNR estimation in time selective fading channels. Both the CRB and the ML estimator for polynomial time selective channels have been derived. The performance of the estimators was also computed analytically for non asymptotic conditions with and without channel model order mismatch. Simulation results have been presented to investigate estimator performance for Rayleigh fading channels with temporal correlation governed by the well known Clarke’s model. It was found that the new estimators yielded dramatic performance improvements over the conventional constant channel estimator at a moderate increase in computational complexity. 10. REFERENCES [1] K. Balachandran, S. R. Kadaba, and S. Nanda, “Channel quality estimation and rate adaption for cellular mobile radio,” IEEE Journal on Selected Areas in Communications, vol. 17, no. 7, pp. 1244–1256, July 1999. [2] T. A. Summers and S. G. Wilson, “SNR mismatch and online estimation in turbo decoding,” IEEE Transactions on Communications, vol. 46, no. 4, pp. 421–423, April 1998. 1 In
the simulations, ρmin = 1.