Nested Partitions and Its Applications to the Intermodal Hub Location Problem Leyuan Shi1 , Liang Pi1 , and Weiwei Chen1 ISyE Department, University of Wisconsin-Madison, Madison, WI 53706, USA
[email protected],
[email protected],
[email protected]
Summary. The Nested Partitions (NP) method has been proven to be a useful framework for effectively solving large-scale discrete optimization problems. In this paper, we provide a brief review of the NP method and its applications. We then present a hybrid algorithm that integrates mathematical programming lower bound into the sampling procedure of the NP framework. The efficiency of the hybrid algorithm is demonstrated by the Intermodal Hub Location Problem (IHLP), a class of discrete facility location problems. Computational results show that the hybrid approach is superior to the integer programming approach and the Lagrangian relaxation approach.
Key words: Discrete Optimization, Nested Partitions, Intermodal Hub Location Problem
1 Discrete Optimization Many key business investment decisions are large-scale discrete optimization problems cast as designing underlying dynamic systems, at the lowest possible cost, to achieve desired service levels. These problems are challenging and are notoriously difficult to solve. There are two principal technologies for large-scale discrete optimization problems: 1) exact algorithms that are guaranteed to find optimal solutions 2) heuristics algorithms that quickly find approximate optimal solutions. Exact solution methods are grounded in mathematical programming theories. Such methods have been studied for decades. Significant breakthroughs in the ability to solve large-scale discrete problems using mathematical programming have been achieved during the last twenty years. Generally, branching methods and decomposition methods are two primary classes of mathematical programming methods used to solve discrete optimization problems [1, 2, 3, 4]. Lagrangian relaxation can be thought of as a decomposition method with respect to the constraints since it moves one or more constraints into the objec-
2
Leyuan Shi, Liang Pi, and Weiwei Chen
tive function. Relaxation methods play a key role in the use of math programming for solving discrete optimization problems [5, 6]. The Lagrangian problem is easy to solve since the complicating constraints are no longer present. Furthermore, it often produces a fairly tight and hence useful bound. Non-exact solution methods include two classes: approximation algorithms and heuristic algorithms. Approximation algorithms are often based on similar mathematical programming theories as exact solution methods, and are usually applied when it is unlikely to find an efficient, exact algorithm. Approximation algorithms can guarantee that the solution lies within a certain range of the optimal solution. They can also usually provide provable runtime bounds. Examples of approximation algorithms for covering problems can be found in [7, 8]. It is well known that approximation algorithms are not suitable for many practical applications. Unlike approximation algorithms, heuristic algorithms aim to seek reasonably good solutions within an acceptable time frame, without making a performance guarantee. Due to its efficiency and effectiveness, heuristic algorithms have recently drawn much attention. Many efficient heuristic methods exist, ranging from the simplest heuristic such as the greedy algorithm to more sophisticated or randomized heuristics such as simulated annealing (SA) [9, 10], genetic algorithm (GA) [11, 12], tabu search [13, 14], and ant colony optimization [15, 16]. Introduced by Shi and Olafsson [17], the Nested Partitions (NP) method is a metaheuristic framework, which is best suited for solving large-scale discrete optimization problems, though it is also applicable to solving continuous optimization problems. The NP method is a partitioning and sampling based strategy that focuses computational effort on the most promising region of the solution space while maintaining a global perspective on the problem. Therefore, it is particularly efficient for problems where the feasible region can be partitioned such that good solutions tend to be clustered together and the corresponding regions are hence natural candidates for concentrating the computation effort. The NP method has been successfully applied in many areas, such as planning and scheduling, logistics and transportation, supply chain design, data mining, and health care. In this paper, we first provide a brief review of the NP method. We then present a detailed implementation of the NP method for the Intermodal Hub Location Problem (IHLP), an emerging research area that has drawn great attention from both academics and industrial sources. The IHLP can be viewed as a class of discrete facility location problems that has certain unique and difficult constraints such as the concave transportation cost function. To effectively solve the problem, we develop hybrid algorithms that utilize the Linear Programming (LP) lower bound for guiding the sampling procedure of the NP method. Numerical results show that the hybrid algorithms can outperform the math programming and Lagrangian relaxation approaches. The rest of the paper is organized as follows. Section 2 provides the review of the NP framework and some successful applications. In Sect. 3, IHLP is
NP and Its Applications to the Intermodal Hub Location Problem
3
formulated and hybrid algorithms are developed. Numerical results are presented in Sect. 4. Section 5 concludes the paper with a discussion about future research.
2 Nested Partitions and Applications In this section, we first introduce the basic methodology and procedure of the NP framework, then some successful applications of the NP and hybrid NP algorithms are reviewed. 2.1 The NP Framework Considering the following optimization problem: min f {x}
x∈X
(1)
Problem (1) can be a combinatorial optimization problem or a mixed integer program where multiple local optima exist. The feasible region is denoted X, and an objective function f : X → R which can be linear or non-linear is defined on this set. For this type of problems, the only known method to guarantee global optimum is to enumerate all possible solutions throughout the whole region X and compare their performance values to find the best one. However, in most practical applications, the feasible region is too large to be enumerated. This type of problems is what the NP method targets. In each iteration of the NP algorithm, we assume that there is a region (subset) of X that is considered the most promising. We partition this most promising region into a fixed number of M subregions and aggregate the entire complimentary region (or called surrounding region) into one region, that is, all the feasible solutions that are not in the most promising region. Therefore we consider M + 1 subsets that are a partition of the feasible region X, namely they are disjointed and their union is equal to X. Each of these M + 1 regions is sampled using some random sampling scheme to generate feasible solutions that belong to that region. The performance values of the randomly generated samples are used to calculate the promising index for each region. This index determines which region is the most promising region in the next iteration. If one of the subregions is found to be the best, this region becomes the most promising region. The next most promising region is thus nested within the last. If the complimentary region is found to be the best, then the algorithm backtracks to a larger region that contains the previous most promising region. This larger region becomes the new most promising region, and is then partitioned and sampled in the same fashion. If region η is a subregion of region σ, we call σ the superregion of η. Let σ(k) denote the most promising region in the k-th iteration. We further
4
Leyuan Shi, Liang Pi, and Weiwei Chen
denote the depth of σ(k) as d(k). The feasible region X has depth 0, the subregions of X have depth 1, and so forth. When X is finite, eventually there will be regions that contain only a single solution. We call such singleton regions regions of maximum depth. If the problem is infinite, we define the maximum depth to correspond to the smallest desired sets. The maximum depth is denoted as d∗ . With this completed notation, we describe the Generic Nested Partitions Algorithm, distinguished from hybrid NP algorithms, in the following paragraph [18]. Notice that the special cases of being at minimum or maximum depth are considered separately. Generic Nested Partitions Algorithm (0 < d(k) < d∗ ) 1. Partitioning. Partition the most promising region σ(k) into M subregions σ1 (k), . . . , σM (k), and aggregate the complimentary region X\σ(k) into one region σM +1 (k). 2. Random Sampling. Randomly generate Nj sample solutions from each of the regions σj (k), j = 1, 2, . . . , M + 1: xj1 , xj2 , . . . , xjNj , j = 1, 2, . . . , M + 1. Calculate the corresponding performance values: f (xj1 ), f (xj2 ), . . . , f (xjNj ), j = 1, 2, . . . , M + 1. 3. Calculate Promising Index. For each region σj , j = 1, 2, . . . , M + 1, calculate the promising index as the best performance value within the region: I(σj ) = min f (xji ), j = 1, 2, . . . , M + 1. i∈{1,2,...,Nj }
4. Move. Calculate the index of the region with the best performance value. ˆjk = arg
min
j∈{1,...,M +1}
I(σj ).
If more than one region is equally promising, the tie can be broken arbitrarily. If this index corresponds to a region that is a subregion of σ(k), that is ˆjk ≤ M , then let this be the most promising region in the next iteration: σ(k + 1) = σˆjk (k). Otherwise, if the index corresponds to the complimentary region, that is ˆjk = M + 1, backtrack to the superregion of the current most promising region: σ(k + 1) = σ(k − 1).
NP and Its Applications to the Intermodal Hub Location Problem
5
For the special case of d(k) = 0, the steps are identical except there is no complimentary region. The algorithm hence generates feasible sample solutions from the subregions and in the next iteration moves to the subregion with the best promising index. For the special case of d(k) = d∗ , there are no subregions. The algorithm therefore generates feasible sample solutions from the complimentary region and either backtracks or stays in the current most promising region. The above procedure of the NP method gives us a framework that guides the search and enables convergence analysis [18]. The NP method is also applicable to problems where the objective function is noisy, for example, when it can only be evaluated as a realization of some random variable. The NP method for stochastic optimization can still be proved to converge to the global optimum [19]. The NP framework provides the flexibility to incorporate domain knowledge or local search into the search procedure. We will provide a detailed implementation example of the NP method in Section 3. 2.2 Applications The NP method is a global metaheuristic found to be effective for difficult large-scale combinatorial optimization problems. The NP framework allows us to incorporate many efficient heuristics such as the tabu search and genetic algorithm into its procedure. The resulting hybrid algorithms are more efficient than either generic NP or the heuristics alone. Domain knowledge and the special structure of the problem can be utilized in the NP procedures, such as biased sampling. The NP method can also be combined with math programming to produce more efficient search algorithms when the math programming approach alone fails to solve the problem. A few successful NP applications are summarized here. Product Design Some heuristic algorithms are successful at solving certain types of discrete optimization problems. In product design, an important problem is discerning how to use the part-worths preferences of potential customers to design a new product such that the market share of the new product is maximized. The share-of-choices problem is very difficult to solve, especially as the product complexity increases and more attributes are introduced. In fact, it belongs to the class of NP-hard problems. In literature, the greedy search (GS) heuristic and dynamic programming (DP) heuristic have been applied [20], and a genetic algorithm (GA) approach has also been introduced [21, 22]. By incorporating these heuristics into the NP framework, new NP/GS, NP/DP, NP/GA, and NP/GA/GS algorithms are designed in [23]. The greedy search and dynamic programming heuristic are used to bias the sampling distribution in the NP method, and the GA is utilized to improve the initial population and the promising index for each region. Numerical examples are
6
Leyuan Shi, Liang Pi, and Weiwei Chen
used to compare the new optimization framework with existing heuristics, and the results indicate that the new method is able to produce higher-quality product profiles. Furthermore, these performance improvements were found to increase with increased problem size. This finding indicates that the new NP optimization framework is an important addition to the product design and development process, and will be particularly useful for designing complex products that have a large number of important attributes. Buffer Allocation Buffer allocation problems exist in various kinds of manufacturing systems. In the design of production lines, people are interested in the issue of how to optimally allocate a given buffer capacity between a number of stations such that a desired system performance is achieved. There are two factors that make this problem difficult. First, due to the inherent complexity of the buffer allocation problems, we expect that most objective functions cannot be defined by an analytical expression. When this is the case, analytic approximation or simulation can be used for performance evaluation. Secondly, the total number of feasible solutions grows exponentially when the total number of machines and the total number of buffer capacity increase. It is usually impossible to search through the whole solution space by enumeration. Hence, the exponential explosion of the solution space and an objective function that cannot be evaluated analytically make this problem intractable for conventional exact methods, but the NP method is well suited for addressing such problems. By combining the NP method with tabu search (TS), which is an improvement of local search using the idea of forbidding solutions from being revisited, a hybrid NP/TS algorithm is proposed in [24]. Tabu search attempts to avoid some solutions from being visited repeatedly. The NP method guarantees that more effort is expended in good regions that are most likely to contain the best solution. The hybrid NP/TS algorithm exploits both the advantage of NP and tabu search, where better results have been reported than those using just NP or tabu search. Supply Chain Optimization In recent years, supply chain optimization has become very popular among the world’s leading manufactures, distributors and retailers. Solving the strategic level warehouse location problem can lead to significant savings for the company by determining the lowest cost or most efficient strategy. With advances in technology and information systems, these problems become more and more complicated in terms of problem size and uncertainty. From a computational point of view, multicommodity capacitated facility location problem are quite challenging because they are combinatorially explosive – some of these optimization models have millions of variables and millions of constraints. They are NP-hard and generally intractable with respect to standard Mixed Integer
NP and Its Applications to the Intermodal Hub Location Problem
7
Programming (MIP) tools, such as the direct application of general purpose branch-and-cut commercial solvers i.e. CPLEX. In [25], a hybrid CPLEX-NP-CPLEX approach is introduced for solving large-scale multicommodity facility location problems. By using CPLEX solver in the NP framework, the new algorithm is significantly faster and generates better feasible solutions than either CPLEX or specialized approaches based on Lagrangian relaxation. This example illustrates that the NP framework can effectively combine problem specified heuristics with MIP tools (such as AMPL/CPLEX) in implementations. Feature Selection The subject of data mining has recently enjoyed enormous interest from both academics and industry. One of the problems that must usually be solved as part of practical data mining projects is the feature selection problem, which involves selecting a good subset of variables to be used by subsequent inductive data mining algorithms. From an optimization point of view, feature selection can clearly be formulated as a binary combinatorial optimization problem where the decision variables determine if a feature (variable) is included or excluded. The problem is generally difficult to solve. The number of possible feature subsets is 2n , where n is the number of features, and evaluating every possible subset is therefore prohibitively expensive unless n is very small. Furthermore, there is generally no structure present that allows for an efficient search through this large space, and a heuristic approach that sacrifices optimality for efficiency is typically applied in practice. Feature selection methods are generally classified as either filtering methods, which produce a ranking of all features before the learning algorithm is applied, or wrapper methods, which use the learning algorithm to evaluate subsets of features. The NP method has numerous attractive properties that are suitable for feature selection. Depending on the method that is used to evaluate sample subsets, the NP method can be implemented as either a filter or a wrapper algorithm, but it always searches through the space of feature subsets by evaluating all subsets. On the other hand, it can also incorporate methods that evaluate individual features into intelligent partitioning to impose a structure that speeds the search. Based on the above idea, the NPWrapper and NP-Filter algorithms are developed and numerically proven to have good performance [26]. Resource Constrained Project Scheduling In the above applications, general-purpose metaheuristics and problem-specific local search methods are incorporated into the NP framework to improve both the partitioning and the generation of feasible solutions. The efficiency and effectiveness of the NP method can be further improved by incorporating expert domain knowledge in a similar manner, resulting in a knowledge-based
8
Leyuan Shi, Liang Pi, and Weiwei Chen
NP algorithm. This provides us with a possibility to exploit domain knowledge that many traditional methods cannot take advantage of. A resource constrained project scheduling problem in many manufacturing and service applications can be described as follows. A project consists of a set of tasks to be performed and a given precedence requirements between some of the tasks. The project scheduling problem involves finding the starting time of each task so that the overall completion time of the project is minimized. One or more resource is required to complete each task. The resources are limited so if a set of tasks requires more than the available resources they cannot be performed concurrently. The problem now becomes NP-hard and cannot be solved efficiently to optimality using any traditional methods. In practice, constraints that are difficult for optimization methods such as mathematical programming are sometimes easily addressed by incorporating domain knowledge. For example, a domain expert may easily be able to specify priorities among tasks requiring the same resource(s) in the resource constrained project scheduling problems. The domain expert can therefore, with some assistance perhaps from an interactive decision support system, specify some priority rules to convert a very complex problem into an easy-to-solve problem. The NP method can effectively incorporate such domain knowledge into the optimization framework by using the priority rules when generating feasible solutions, as well as when partitioning intelligently. An example on the optimal process planning is presented in [18], and the knowledge-based NP algorithm for process planning is effective and capable of producing high quality solutions rapidly. Radiation Treatment Planning Health care delivery is an area of immense importance where optimization techniques have increasingly been used in recent years. Radiation treatment planning is an important example of this. The Intensity Modulated Radiation Therapy (IMRT) is a recently developed complex technology for such treatment. Because of its complexity, the treatment planning problem is generally divided into several subproblems. The first is termed the Beam Angle Selection (BAS) problem. In essence, beam angle selection requires the determination of roughly 4-9 angles from 360 possible angles subject to various spacing and opposition constraints. It is computational intense to solve this selection problem. In modern clinics, the rotational angles of treatment couch are also considered another set of decision variables. This adds even more complexity to the problem. Because of these reasons, currently the angles are selected manually by clinicians based on their experiences. By applying the NP framework for automating beam angle selection, high quality solutions have been reported [18]. Relative to good quality beam angle sets constructed via expert clinical judgement and other approaches, the beam sets generated via NP showed significant reduction (up to 32%) in radiation delivered to non-cancerous organs-at-risk near the tumors. Thus, in addition
NP and Its Applications to the Intermodal Hub Location Problem
9
to providing a method for automating beam angle selection, the NP framework yields higher quality beam sets that significantly reduce radiation damage to critical organs.
3 Intermodal Hub Location Problems In this section, we provide a detailed implementation of the NP method to the Intermodal Hub Location Problem (IHLP). In particular, we will focus on three important steps of the NP method: Partitioning, Sampling and Backtracking. 3.1 Problem Formulation Due to its economic impact, the Intermodal Hub Location Problem (IHLP) has drawn a great attention by researchers [27, 28, 29]. The intermodal transportation via truck and rail is an alternative to single mode, truckload carriage. Intermodal operations utilize a sealed container or truck trailer that is mechanically moved between modes (truck, rail, ship) in a seamless fashion. An intermodal terminal has equipment suitable for transferring the containers and trailers between modes. For distances over a certain threshold, rail transportation becomes more efficient than truck transportation and results in savings in time, operating costs and labor. Typically an IHLP consists of three connected movements: two local ones that involve truck movements, and an intermediate one that involves rail movement. The IHLP aims to minimize the costs of the total intermodal transportation system. These costs consist of operation costs of the opened hubs and the routing costs of the intermodal movements. The IHLP can be viewed as a type of discrete location facility problems. Before we formulate the problem, we introduce the following notations. Sets: • I = {1, . . . , |I|}: set of origin/destination terminal locations. • R = {1, . . . , |R|}: set of intermodal hub locations. • F = {1, . . . , |F |}: set of demanding flows, i.e., movement demand from certain origin to certain destination. Parameters: • • • • •
Of , f ∈ F : origin terminal of flow f . Df , f ∈ F : destination terminal of flow f . Wf , f ∈ F : amount of flow f . C1k , k ∈ R: operating cost of hub k, if k is opened. C2ab , (a, b) ∈ {I, R} ∪ {R, R} ∪ {R, I}: transportation cost function of the flow from location a to location b.
10
Leyuan Shi, Liang Pi, and Weiwei Chen
•
C3f , f ∈ F : cost rate per unit amount if flow f is not moved or moved by other more expensive method such as pure truck movement. • Mab , (a, b) ∈ {I, R} ∪ {R, I}: = 1, if movement from a to b are allowed; = 0, otherwise. Variables: •
xf km , f ∈ F, k ∈ R, m ∈ R, ≥ 0: the amount of flow f moved through intermodal rail line (k, m). • yab , (a, b) ∈ {I, R} ∪ {R, R} ∪ {R, I}, ≥ 0: the amount of flow from location a to location b. • zk , k ∈ R: 0-1 facility location variables. = 1 if hub k is opened; = 0, otherwise. • uf , f ∈ F, ≥ 0: the amount of flow f that is not moved through the intermodal operations. The formulation of the problem is described as follows. Objective: min Q = X C1r · zr
(2)
r∈R
X
+
C2ab (yab )
(3)
(a,b)∈{I,R}∪{R,R}∪{R,I}
+
X
C3f · uf
(4)
f ∈F
Subject to:
X
uf +
xf km = Wf
∀f ∈ F,
(5)
xf km ≤ Wf · zk
∀f ∈ F, k ∈ R,
(6)
xf km ≤ Wf · zm
∀f ∈ F, m ∈ R,
(7)
k∈R,m∈R
X m∈R
X
k∈R
X
xf km ≤ yik
∀i ∈ I, k ∈ R,
(8)
f ∈F,m∈R:Of =i
X
xf km ≤ ykm
∀k ∈ R, m ∈ R,
(9)
f ∈F
X
xf km ≤ ymj
∀m ∈ R, j ∈ I,
(10)
f ∈F,k∈I:Df =j
xf km = 0
∀f ∈ F, k ∈ I, m ∈ I : M(Of )k · Mm(Df ) = 0
(11)
Here, in the objective function, (2) are the costs of hub operations, (3) are the costs of flows moved by the intermodal operations, and (4) are the costs of flows not moved by the intermodal operations. Constraints (5) are the
NP and Its Applications to the Intermodal Hub Location Problem
11
requirements that all the flows should satisfy. Constraints (6) and (7) require that each flow can only be routed via opened hub in an intermodal movement. Constraints (8), (9) and (10) are the relationships between variables x’s and variables y’s. Constraints (11) are the restrictions of the movements between terminals and hubs. Due to the scale economies which is an crucial consideration in transportation industry, we assume C2ab to be a nondecreasing concave function. So, term (3) include concave piecewise linear functions, leading to one major difficulty of solving the problem. There is standard procedures to linearized term (3) [30], however, the problem size will be increased due to the new variables and constraints introduced. Therefore, traditional mathematical programming techniques can not be used directly to solve this large scale problem. 3.2 NP/MP Algorithm To effectively solve the IHLP, in this subsection, we developed a hybrid NP and mathematical programming (NP/MP) approach. The effectiveness of the hybrid algorithm is demonstrated through a set of test problems that have been widely used in the area of logistics. In most of NP implementations, complete samples (or solutions) are generated in each sampling step. To be able to integrate the LP/MIP techniques into the NP framework, we introduce a concept of a partial sample. A partial sample is a set of solutions that is generated by sampling only a part of the variables in a given region. For example, assume that the solution space can be denoted as: (X1 , . . . , Xn ) and the sampling region is (X1∗ , . . . , Xk∗ , Xk+1 , . . . , Xn ) where X1∗ , . . ., and Xk∗ are fixed. By sampling Xk+1 to Xk+j , 1 ≤ j < n − k, we have a partial sample of the following form: ¯ k+1 , . . . , X ¯ k+j , Xk+j+1 , . . . , Xn ). The purpose of introducing (X1∗ , . . . , Xk∗ , X partial samples is that by reducing number of variables of the original optimization problem, the subproblem with only variables of (Xk+j+1 , . . . , Xn ) could be solved effectively and quickly using mathematical programming techniques. NP/MP Algorithm S0: Set the initially most promising region as the overall solution space. Set the initial surrounding region as φ. Go to S1. S1: If stopping conditions hold, restart (go to S0) or stop(the best sample obtained so far is returned); otherwise, go to S2; S2: Obtain LP solution for current most promising region. Do LP Biased Sampling (see below) over the most promising region and surrounding region to ¯ k+1 , . . . , X ¯ k+j , Xk+j+1 , . . . , Xn ). generate partial samples (X1∗ , . . . , Xk∗ , X Go to S3. ¯ k+1 , . . . , X ¯ k+j , Xk+j+1 , . . . , Xn ) S3: Evaluate partial samples (X1∗ , . . . , Xk∗ , X by solving the embedded problems and obtaining samples. Calculate the
12
Leyuan Shi, Liang Pi, and Weiwei Chen
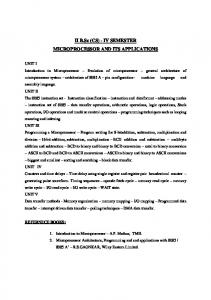
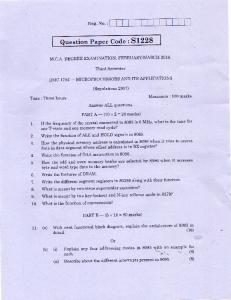
promise index for both the most promising region and the surrounding region. If the most promising region is more promising, go to S4; otherwise, go to S5. S4: Perform the partitioning and get a new most promising region. (LP solution-based partitioning can be used.) Go to S1. S5: Carry out backtracking. The resulting region is set to be the next most promising region. Go to S1. There are several important elements in the hybrid NP/MP algorithm that are described in the following. Sampling The first step in applying the NP/MP approach to IHLP problems is to determine a proper form of partial samples such that we can fully leverage the capability of IP/MIP solvers such as CPLEX or specialized algorithms to efficiently solve the small-scale subproblems associated with the partial samples. For the IHLP, we define partial samples as feasible solutions to the problem in the form of letting a set of hubs be closed (some z variables are fixed to 0), and no flow can move through these closed hubs. Figure 1 shows an example with seven hubs r1 , . . . , r7 , and four flows f1 , . . . , f4 ; and in a partial solution, hub r1 , r4 and r6 are closed.
r4
r5 f1
f2 r3
r6 r2 f4
r7 f3
r1
Terminals Potential hubs Closed hubs
Fig. 1. IHLP: A partial solution
Biased sampling techniques can be used to obtain partial samples that contain high quality samples. In [31], we develop a sampling procedure, called
NP and Its Applications to the Intermodal Hub Location Problem
13
the Linear Programming (LP) solution-based sampling, which will be applied to our problem. The detailed procedure of LP Biased Sampling is given below: 1. Obtain the LP solution. Denoted the z part by z∗ . 2. Calculate the sampling weights of variable z, based on the value of z∗ . For ∀h ∈ H, the sampling weight is positively correlated to the value of zh∗ . 3. Based on the sampling weights, a partial sample can be generated: randomly select M variables from all z 0 s [32] and fix the remaining (m − M ) z variables to zero. In this paper, a linear function of z ∗ is used to calculate the sampling weights. For ∀k ∈ R, we define Wk0 = zk∗ + ²k , (²k is a very small nonnegative number, such as 0.01). Then after the normalization step, we can P obtain the sampling weights as: ∀k ∈ R, W (hub k is open) = Wk = Wk0 / k0 ∈R Wk0 0 . An example with seven hubs (r1 , . . . , r7 ) is shown in Table 1. Based on these weights, we can sample a set of hubs to be potentially opened, and let all other hubs to be closed. One of the possible sampling results using the weights in Table 1 can be hub r1 , r4 and r6 are closed, and others are potentially opened (as shown in Fig. 1). Table 1. An example of the sampling weights (² = 0.01) Hub (k) LP solution (zk∗ ) Weight (Wk0 ) Normalized weight (Wk ) r1 r2 r3 r4 r5 r6 r7
0 0.3 0.7 0 0.5 0.1 0.6
0.01 0.31 0.71 0.01 0.51 0.11 0.61
1/227 31/227 71/227 1/227 51/227 11/227 61/227
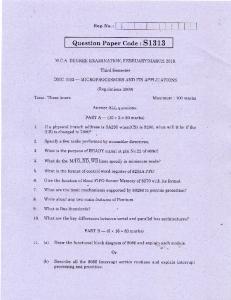
Calculating the Promising Index To calculate the promising index, we first need to evaluate the partial samples generated in the sampling step, and obtain a best (or good) sample within each partial sample using standard integer programming algorithms. In Fig. 1, hub r1 , r4 and r6 are closed. A sample which is contained by the partial solution is shown in Fig. 2. Each sample is a complete solution of the original problem, and the top samples obtained in the partial sample evaluation step will be used to calculate the promising index and guide the partitioning/backtracking step. For the IHLP, if only partial of the z variables are fixed (to 0) in a partial sample, the partial sample corresponds to a relatively small problem with the same structure as the original problem; if the partial samples are in the form of fixing all the z variables, the subproblem associated with each partial sample
14
Leyuan Shi, Liang Pi, and Weiwei Chen
is a pure routing problem. For both cases, standard integer programming algorithms can be used to evaluate partial samples efficiently.
r5
r4
f2 f1
r3
r6 r2 f4
r7 f3
r1 Terminals Opened hubs Closed hubs
Fig. 2. IHLP: A sample
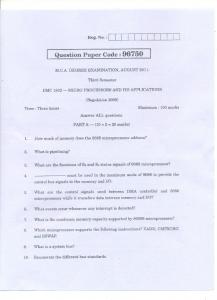
Partitioning, Backtracking and Stopping If the most promising region needs to be further partitioned, we keep the current best sample in the next most promising region, which provides a set of available partitioning attributes. For the IHLP, each available partitioning attribute opens a certain hub, and can be potentially used to partition current most promising region into two subregions (one partition with this hub open which is selected as the next most promising region, one with this hub closed which is aggregated into the surrounding region). Also, we can use several attributes for partitioning. For example, when attribute with hub k open and attribute with hub m open are used for partitioning, then one partition can be both hub k and hub m are open (selected as the next most promising region), and the other partition is where at least one of the two hubs is closed (aggregated into the surrounding region). This example can be described in Fig. 3. Then, we can use the LP solution-based partitioning to select the partitioning attribute(s) from all available ones. Basically, we use the LP solution on the current most promising region as the partitioning index, called LP solution-based partitioning index. For the IHLP, the value of zk∗ (k ∈ R) is used as the LP solution-based partitioning index for the attribute that hub k is open. We can select one attribute (or several attributes) with the best (or top) LP solution-based partitioning index value for partitioning.
NP and Its Applications to the Intermodal Hub Location Problem
Original surrounding region
Original promising region Hub k and hub m are open New promising region
15
At least one of hub k and hub m is closed
New surrounding region
Fig. 3. An example of effective partitioning
If backtracking is performed, then some constraints on the promising region are relaxed. For the IHLP, by flexibly dropping some cuts which let certain hub(s) open on the current most promising region, the backtracking area (the most promising region in the next iteration) will include the current most promising region and the best sample obtained so far.
4 Computational Results In this section, we report our computational results. 4.1 Experimental setting We randomly generate a set of instances with similar settings as in [31] to test our solution approach. The test problems can be described as follows: Map and Locations: We generate a rectangle map of 500 × 500 square miles. |I| terminal locations and |R| ramp locations are randomly generated over the map. For each location pair, the length between the two locations is the Euclidean distance on the map. Flows: |F | flows are randomly generated on the origin/destination terminal location pairs with distance larger than 300 miles. ∀f ∈ F, Wf is randomly generated by Uniform(10,50). Cost Functions: The cost of opening a certain hub k (k ∈ R) is set to |L| · Uniform(30, 40). The cost rate per unit amount of unmoved flows is 0.18· (distance between the origin and the destination of the flow). The transportation cost function for each location pair is set to be a four-piece linear concave function: for each location pair with rail movement, the marginal cost rates (the slops for the four pieces of the cost function) per mile are randomly generated over the range (S1, S2), and the 3 non-differentiable points are set to be 0.01·P 1·|L|, 0.03·P 1·|L| and 0.03·P 1·|L|; for each location pair with truck
16
Leyuan Shi, Liang Pi, and Weiwei Chen
movement, the marginal cost rates per mile are randomly generated over the range (S3, S4), and the 3 non-differentiable points are set to be P 2 · |L|/|I|, 2 · P 2 · |L|/|I| and 3 · P 2 · |L|/|I|. Routing: N is set to be 200 miles. Overall, we generated 30 testing instances of common properties and scales in real applications, with 10 different groups of scale setting (as shown in Table 2) and 3 different groups of parameter setting (as shown in Table 3). Table 2. Scale setting Index |I| |R| |F | a b c d e f g h i j
60 30 60 80 50 40 40 100 80 60
30 30 40 40 50 50 40 30 30 40
300 300 200 200 150 150 200 400 500 300
Table 3. Transportation cost function setting Index S1 1 2 3
S2
S3
S4 P1 P2
0.07 0.09 0.14 0.16 40 30 0.1 0.11 0.15 0.16 20 20 0.07 0.11 0.12 0.16 10 10
4.2 Algorithm Setting We first tested all instances through CPLEX 9.1 with default CPLEX parameter setting in our computer with P4 2.8G CPU and 1G memory. Some algorithm setup for the NP/MP approach are described as follows: • •
• •
Dual simplex method is used to solve the LP problem on the most promising region in each iteration. CPLEX is used to evaluated each partial sample: we apply the value of the current best solution as the upper bound, set the MIP tolerance gap to be 0.005, and set the computation time limit to be 2 minutes. Depending on the scale of the problem, in each iteration, take 6-10 partial samples, and fix 2-3 hubs to be open if backtracking is not needed. Stop the algorithm when the stopping conditions are met, and no restarting is used.
NP and Its Applications to the Intermodal Hub Location Problem
17
For comparison purpose, we also tested the Lagrangian relaxation (LR) approach [33] which is widely used to solve DFLPs in the literature. Constraints (8) (9) and (10) are relaxed in the LR subproblem, and the corresponding multipliers are added to the objective function. Subgradient algorithm is used to update the multipliers in each iteration of the LR procedure. After obtaining the integer solution of the LR subproblem, fix the y’s variables, and solve the original problem to get the feasible integer solution, and the best feasible solution when the algorithm ends is reported. For all the testing approaches (CPLEX, NP/MP and LR), the time limit for each instance is set to 2 hours. 4.3 Simplified LP Solution If solving the LP problem becomes the bottleneck for the hybrid NP/MP algorithm, we will use simplified LP problem to replace the original LP problems. Our numerical results show that solving the simplified LP problem requires much less computation time, and the LP solution of the simplified LP problem, which we call the simplified LP solution, can still be used to guild the sampling and partitioning steps. In the partial sample evaluation step, we refer to the original problem to get complete samples. Four kinds of LP simplification techniques which are easily applicable to IHLPs are provided here. Each of these techniques can be applied alone and their combination might result in better performance in some cases. Flow Reduction (FR): Flow Reduction uses part of, instead of all of, the flows in the formulation. The FR technique can be suited for problems with relative large set of flows. Denote the set of selected flows to be L0 ⊂ L, then the basic problem here is how to select the set L0 . After selecting the set L0 , we also need to change the transportation cost function C2 accordingly. Particularly, we tend to change the scale of the cost function. The following procedure is S = Pused to calculate the adjusted cost function C2’: denote P + M , then, ∀(a, b) ∈ {I, R} ∪ {R, R} ∪ {R, I}, g ∈ < , define M / 0 l l l∈L l∈L C20ab (g) = C2ab (g/S). In the test examples, we uniformly select set L0 , and 60-70% of all the flows are selected in the simplified LP problem. Route Restriction (RR): When using the Route Restriction technique, we try to set some restriction on the possible routes each flow can take to reduce the LP problem size, i.e., to fix some x’s variables to be 0. In the original problem, each flow f (∈ F ) can be moved through a set of possible routes when all hubs are open, denoted as Uf . For each flow f ∈ F , we select a set of unpromising routes Uf0 ⊂ Uf , and forbid all routes in Uf0 for flow f . By using the RR technique, we can still reduce the number of variables and potentially the number of constraints in the original problem. In the test examples, we use a simple heuristics to select forbidden routes: for each flow f and a route u ∈ Uf with rail movement from k to m, if Dis(Of )k > G, or Dism(Df ) > G (G < N is a pre-determined parameter), the route u is forbidden for flow f . G is set to 130-150 miles.
18
Leyuan Shi, Liang Pi, and Weiwei Chen
Hub Division (HD): When using the Hub Division technique, Q we divide the original hub set R into some subsets, denoted as Re , e ∈ E. e∈E Re = R, and in a certain iteration, if a hub k is open for the promising region, we have ∀e ∈ E, k ∈ Re . We can get |E| subproblems by replacing the set R with set Re in the original problem for each e ∈ E. Then the biased sampling weight and the LP solution-based partitioning index of a particular hub h (∈ R) can be calculated according to the LP solutions of the subproblems. Denote LP solution of the z variable(s) in subproblem Re (e ∈ E) to be ze , then the LP solution z ∗P used in the NP/MP approach can be calculated as P follows: ∀k ∈ R. zk∗ = ( e∈E:k∈Re ze )/( e∈E:k∈Re 1). In the test examples, we randomly divide R into two equal size subsets, resulting in two separated smaller LP problems. Cost Simplification (CS): In many real situations, the complicated transportation cost functions associated with each location pair increase the computational requirement of the LP problem dramatically. So, we are considering Cost Simplification in the formulation, and reduce the LP solution time. The CS technique used in this paper is called individual cost function simplification. In the original problem, to linearize term (3), a set of the variables and constraints need to be introduced which largely increases the problem size, and the number of variables and constraints introduced is positively related to the number of pieces of the functions C2’s. So by reducing the number of pieces in the functions C2’s, we can largely reduce the difficulty in solving the LP problem. In the test examples, a two-piece linear function is used to approximate the original four-piece linear function. 4.4 Testing Results 21 out of 30 test instances, the LP relaxed problem can be solved relatively easily, and the computational results are shown in Table (4). (Here, CPub is the upper bound from CPLEX; CPlb is the lower bound from CPLEX; CPgap is the gap between CPub and CPlb; LRub is the upper bound of the solution reported by the LR approach; LRgap is the gap between LRub and CPlb; NP-MPub is the upper bound from NP/MP algorithm; NP-MPgap is the gap between NP-MPub and CPlb.) For the rest of 9 instances where the LP solving time of the original problem is large, the LP simplification techniques described in the previous section are tested. The computational results are summarized in Table (5). (FRub/RRub/HDub/CSub is the bound of the solution obtained by the NP/MP approach with each kind of LP simplification technique respectively, FRgap/RRgap/HDgap/CSgap is the gap between FRub/RRub/HDub/CSub and CPlb respectively.) Overall, the NP/MP approach outperforms CPLEX and LR significantly in terms of the solution quality within the time limit.
NP and Its Applications to the Intermodal Hub Location Problem
19
Table 4. Computational results on instances with small LP time Ins CPub CPlb CPgap(%) LRup LRgap(%) NP-MPub NP-MPgap(%) 1a 1b 1c 1d 1e 1f 1g 2a 2b 2c 2d 2e 2f 2g 3a 3b 3c 3d 3e 3f 3g
604171 461617 403153 385607 302019 253196 350581 604171 570222 401353 385607 302020 300074 395128 604171 455698 401353 385607 302020 300074 395128
487561 448997 320345 313337 238229 232600 312283 553196 523013 365622 354859 275713 267871 353558 477633 447052 305522 295429 229240 222205 299684
Ave.
23.9 2.8 25.8 23.1 26.8 8.9 12.3 9.2 9.0 9.8 8.7 9.5 12.0 11.8 26.5 1.9 31.4 30.5 31.7 35.0 31.8 18.2
518017 505079 337503 329818 256319 234998 329982 567793 555238 371864 361218 281922 274028 367467 485076 484173 314423 312687 237010 248134 312503
6.2 12.5 5.4 5.3 7.6 1.0 5.7 2.6 6.2 1.7 1.8 2.3 2.3 3.9 1.6 8.3 2.9 5.8 3.4 11.7 4.3 4.8
494705 454880 324313 317509 241663 234898 315783 565163 528691 372036 359298 275793 269229 358710 481618 454129 312196 301513 233042 226639 305789
1.5 1.3 1.2 1.3 1.4 1.0 1.1 2.2 1.1 1.8 1.3 0.0 0.5 1.5 0.8 1.6 2.2 2.1 1.7 2.0 2.0 1.4
5 Conclusion In this paper, we present a review of the Nested Partitions method and its successful applications. These applications show that the NP method provide us a flexible framework for solving discrete optimization problem effectively. We then develop a hybrid NP/MP algorithm for the Intermodal Hub Location Problem (IHLP). IHLP is an important class of discrete facility location problems that has drawn great attention recently by researchers from both academic and industry. The computational results show that the NP/MP approach is superior to integer programming approach and the Lagrangian relaxation approach which are two conventional approach for many facility location problems. The NP/MP approach is also applicable for other discrete facility location problems. Further research on improve the efficiency of NP/MP approach to solve large-scale IHLPs and other discrete facility location problems may include the following aspects: •
In the standard NP/MP approach, for evaluating each partial sample, we use the MIP solvers. For a specific problem, it is possible to apply or
20
Leyuan Shi, Liang Pi, and Weiwei Chen Table 5. Computational results on instances with large LP time Ins
CPub
CPlb CPgap(%) LRub LRgap(%)
1h 802648 665327 1i 1025920 834316 1j 601230 480885 2h 802648 747940 2i 1025920 943455 2j 601230 547922 3h 802648 655665 3i 1025920 842773 3j 601230 472398 Ave.
20.6 23.0 25.0 7.3 8.7 9.7 22.4 21.7 27.3
717057 910059 522441 777700 986426 566821 687713 854783 488013
7.8 9.1 8.6 4.0 4.6 3.4 4.9 1.4 3.3
18.43
5.23
Ins FRub FRgap(%) RRub RRgap(%) HDub HDgap(%) CSub CSgap(%) 1a 1b 1c 2a 2b 2c 3a 3b 3c
673163 842734 488195 763505 963960 562097 666734 850293 481328
Ave.
•
•
•
1.2 1.0 1.5 2.1 2.2 2.6 1.7 0.9 1.9 1.67
673142 845456 488373 760147 966587 560644 668592 850228 481328
1.2 1.3 1.6 1.6 2.5 2.3 2.0 0.9 1.9 1.69
673904 847589 494604 760808 970019 560378 670286 857518 482605
1.3 1.6 2.9 1.7 2.8 2.3 2.2 1.7 2.2 2.08
675075 842691 488243 764629 965599 560510 666942 848557 480691
1.5 1.0 1.5 2.3 2.3 2.3 1.7 0.7 1.8 1.67
develop some efficient heuristics [34, 35] to replace the MIP solvers and improve the efficiency of the NP/MP approach. For some problems, some local search algorithms (based on the top samples) can also be combined into the NP/MP approach to achieve even better performance, i.e., to use the results of the local search procedure to guild the partitioning/backtracking step in each iteration. For multi-level discrete facility location problems [36], each step of the NP/MP approach may need more complicated design, and deserves dedicated research work. As we considered deterministic the version of IHLPs in this paper, we are also interested in the stochastic version of IHLPs [37]. Potentially, the NP method can be even more beneficial for stochastic problems.
References 1. A. H. Land and A. G. Doig, “An automatic method for solving discrete programming problems,” Econometrica, vol. 28, no. 3, pp. 497–520, July 1960.
NP and Its Applications to the Intermodal Hub Location Problem
21
2. G. B. Dantzig and P. Wolfe, “Decomposition principle for linear programs,” Operations Research, vol. 8, no. 1, pp. 101–111, 1960. 3. M. Desrochers and F. Soumis, “A column generation approach to the urban transit crew scheduling problem,” Transportation Science, vol. 23, no. 1, pp. 1–13, 1989. 4. M. Desrochers, J. Desrosiers, and M. Solomon, “A new optimization algorithm for the vehicle routing problem with time windows,” Operations Research, vol. 40, no. 2, pp. 342–354, 1992. 5. M. L. Fisher, “The lagrangian relaxation method for solving integer programming problems,” Management Science, vol. 50, no. 12, pp. 1861–1871, 2004. 6. C. Lemar´echal, “Lagrangian relaxation,” in Computation Combanatorial Optimization, ser. Lecture Notes in Computer Science, M. J¨ unger and D. Naddef, Eds. Berlin Heidelberg: Springer-Verlag, 2001, vol. 2241, pp. 112–156. 7. N. G. Hall and D. S. Hochbaum, “A fast approximation algorithm for the multicovering problem,” Discrete Applied Mathematics, vol. 15, no. 1, pp. 35–40, 1986. 8. D. Bertsimas and C.-P. Teo, “From valid inequalities to heuristics: a unified view of primal-dual approximation algorithms in covering problems,” Operations Research, vol. 46, no. 4, pp. 503–514, 1998. 9. S. Kirkpatrick, C. D. Gelatt, and M. P. Vecchi, “Optimization by simulated annealing,” Science, vol. 220, no. 4598, pp. 671–680, 1983. 10. P. J. M. Laarhoven and E. H. L. Aarts, Simulated annealing: theory and applications. Norwell, MA: Kluwer Academic Publishers, 1987. 11. D. E. Goldberg, Genetic Algorithm in Search, Optimization and Machine Learning. Reading, MA: Addison-Wesley, 1989. 12. M. Mitchell, An Introduction to Genetic Algorithms. Cambridge, MA: MIT Press, 1998. 13. D. Cvijovi´c and J. Klinowski, “Taboo search: An approach to the multiple minima problem,” Science, vol. 267, no. 5198, pp. 664–666, 1995. 14. F. W. Glover and M. Laguna, Tabu Search. Boston, MA: Kluwer Academic Publishers, 1997. 15. M. Dorigo, “Optimization, learning and natural algorithms,” Ph.D. dissertation, Politecnico di Milano, Italy, 1992. 16. M. Dorigo, G. D. Caro, and L. M. Gambardella, “Ant algorithms for discrete optimization,” Artificial Life, vol. 5, no. 2, pp. 137–172, 1999. ´ 17. L. Shi and S. Olafsson, “Nested partitions method for global optimization,” Operations Research, vol. 48, no. 3, pp. 390–407, 2000. 18. ——, Nested Partitions Optimization: Methodology And Applications, ser. International Series in Operations Research & Management Science. Springer, 2007, vol. 109. 19. ——, “Nested partitions method for stochastic optimization,” Methodology and Computing in Applied Probability, vol. 2, no. 3, pp. 271–291, 2000. 20. R. Kohli and R. Krishnamurti, “Optimal product design using conjoint analysis: Computational complexity and algorithms,” European Journal of Operations Research, vol. 40, pp. 186–195, 1989. 21. P. V. Balakrishnan and V. S. Jacob, “Triangulation in decision support systems: Algorithms for product design,” Decision Support Systems, vol. 14, pp. 313–327, 1995. 22. ——, “Genetic algorithms for product design,” Management Science, vol. 42, pp. 1105–1117, 1996.
22
Leyuan Shi, Liang Pi, and Weiwei Chen
´ 23. L. Shi, S. Olafsson, and Q. Chen, “An optimization framework for product design,” Management Science, vol. 47, no. 12, pp. 1681–1692, 2001. 24. L. Shi and S. Men, “Optimal buffer allocation in production lines,” IIE Transactions, vol. 35, pp. 1–10, 2003. 25. L. Shi, R. R. Meyer, M. Bozbay, and A. J. Miller, “A nested partitions framework for solving large-scale multicommodity facility location problems,” Journal of Systems Science and Systems Engineering, vol. 13, no. 2, pp. 158–179, 2004. ´ 26. S. Olafsson and J. Yang, “Intelligent partitioning for feature selection,” INFORMS Journal on Computing, vol. 17, no. 3, pp. 339–355, 2005. 27. J. F. Campbell, “Integer programming formulations of discrete hub location problems,” European Journal of Operation Research, vol. 72, pp. 387–405, 1994. 28. M. E. O’kelly and D. L. Bryan, “Hub location with flow economies of scale,” Transportation Research Part B, vol. 32, no. 8, pp. 605–616, 1998. 29. I. Racunica and L. Wynter, “Optimal location of intermodal freight hubs,” Transportation Research Part B, vol. 39, pp. 453–477, 2005. 30. K. L. Croxton, B. Gendron, and T. L. Magnanti, “A comparison of mixedinteger programming models for nonconvex piecewise linear cost minimization problems,” Management Science, vol. 49, no. 9, pp. 1268–1279, 2003. 31. L. Pi, Y. Pan, and L. Shi, “Hybrid nested partitions and mathematical programming approach and its applications,” Under Revision(available at www.cae.wisc.edu/˜ lpi), 2006. 32. C. K. Wong and M. C. Easton, “An efficient method for weighted sampling without replacement,” SIAM Journal on Computing, vol. 9, no. 1, pp. 111–113, 1980. 33. A. Geoffrion, “Lagrangian relaxation for integer programming,” Math. Programming Study 2, vol. 2, pp. 82–114, 1974. 34. S. Abdinnour-Helm and M. A. Venkataramanan, “Solution approaches to hub location problems,” Annals of Operations Research, vol. 78, no. 0, pp. 31–50, 1998. 35. T. S. Hale and C. R. Moberg, “Location science research: A review,” Annals of Operations Research, vol. 123, pp. 21–35, 2003. 36. J. Zhang, “Approximating the two-level facility location problem via a quasigreedy approach,” Mathematical Programming, series A, vol. 108, no. 1, pp. 159–176, 2006. 37. L. V. Snyder, “Facility location under uncertainty: A review,” IIE Transactions, vol. 38, no. 7, pp. 547–564, 2006.