Image restoration via fast computing of the MoorePenrose inverse matrix Spiros Chountasis
Dimitrios Pappas
Hellenic Transmission System Operator Athens, Greece
[email protected]
Department of Statistics, Athens University of Economics and Business 76 Patission Str, 10434, Athens, Greece
[email protected]
Vasilios N. Katsikis Department of Applied Sciences, TEI of Chalkis GR 34400 Psahna, Greece
[email protected] Abstract— In this article we present a new computational method for the Moore-Penrose inverse that finds application in a broad scientific field such as digital image restoration. The proposed numerical solution, based upon QR factorization, provide us the Moore-Penrose inverse of any matrix. In fact, this work is a generalization of [7] in the sense that this method can be applied in general matrices square or rectangular, full rank or not. Keywords-component; Image processing, generalized inverse, QR factorization.
I.
INTRODUCTION
In a recent article [6], it is provided a new method for the fast computation of the generalized inverse of full rank rectangular matrices and of square matrices with at least one zero row or column. For this purpose, it is used a special type of tensor product of two vectors, usually used in infinite dimensional Hilbert spaces. In this work we extend our method so that it can be used in any kind of matrix, square or rectangular, full rank or not. The numerical experiments show that the proposed method performs well. The field of image restoration has seen a tremendous growth in interest over the last two decades [2, 10, 11]. The recovery of an original image from degraded observations is of crucial importance and finds application in several scientific areas including medical imaging and diagnosis, military surveillance, satellite and astronomical imaging, and remote sensing. From the computational point of view, several methods are presented in [5, 9] for achieving a fast recovered and high resolution reconstructed images. In this paper the proposed method provide us a fast computational algorithm for the calculation of the Moore-Penrose inverse in order to have a fast and reliable digital image restoration. In the present work, the numerical tasks have been performed using the high-end Matlab programming language. Specifically, the Matlab 7.4 (R2007b) environment was used on an Intel(R) Pentium(R) Dual CPU T2310 @ 1.46 GHz 1.47 GHz 32-bit system with 2 GB of RAM memory running on the Windows Vista Home Premium Operating System.
II.
PRELIMINARIES AND NOTATION
According to [8], for each mapping
x ∈ R k , we consider the
e ⊗ f : R k → R k with (e ⊗ f )( x) = 〈 x, e〉 f . Assume that {e1 ,..., en } and { f1 ,..., f n } are two collections of orthonormal vectors and linearly independent k vectors of R with n < k , respectively. Then, every rank- n operator
T can be written in the form T = ∑ i =1ei ⊗ f i . We n
shall refer to this type of tensor product as the tensor-product of the collections {e1 ,..., en } and { f1 ,..., f n }. The adjoint operator
T * of T is the rank- n operator T * = ∑ i =1 f i ⊗ ei . n
The tensor-product of two collections of vectors, as defined above, is a linear operator, therefore, it has a corresponding matrix representation T which we shall call as the tensorproduct matrix of the given collections. Theorem 2.1 [4, Theorem 3.2] Let H be a Hilbert space. If T =
∑
n
e ⊗ f i is a rank- n operator then its generalized
i =1 i
inverse is also a rank- n operator and for each defined by the relation T †x =
n
∑λ
i
x ∈ H , it is
( x ) ei ,
i =1
where the functions λi are the solution of an appropriately defined n × n linear system. In [6], based on Theorem 2.1, a new algorithm (the ginv function) is provided for computing the generalized inverse of full rank matrices, and of square matrices with at least one zero row or column and the rest of the matrix full rank. In other
978-1-4244-4530-1/09/$25.00 ©2009 IEEE
words, our main concern was to calculate the corresponding in the expansion T †x =
λi
n
∑ λ ( x )e , i
In this paper we adopt the use of a shift invariant model for the blurring process as in [3]. Therefore, the analytically expression for the degraded system, is given by a two dimensional (horizontal and vertical) convolution i.e.,
i
i =1
n vectors of the standard k † basis of R , in order to provide the generalized inverse T . where { e1 , ..., e n } are the first
To extend this result for any kind of matrix, we will make use of the QR factorization, as well as the reverse order law for generalized inverses. The following proposition is a restatement of a part of R. Bouldin’s theorem [1]. Proposition 2.2 Let A, B be bounded operators on H
with closed range. Then ( AB ) † = B † A † if and only if the following three conditions hold:
x out [i , j ] =
r
A† A commutes with BB* ,
iii)
BB † commutes with A* A .
Using the above proposition, we have the following result:
A be a square n × n matrix and A = QR be the QR factorization of A . Then, A† = R†Q* . Proposition 2.3 Let
Proof. We must prove that the conditions of Bouldin's theorem hold. The first condition always holds, since in the case of matrices the range is always closed. For the second condition, it is easy to see that since Q is a unitary matrix,
Q † = Q* = Q −1 and so Q †QAA* = AA*Q †Q. The third condition can be proved in a similar way. Using the QR factorization, the matrix R is upper triangular. In the case of non invertible matrices, since one or more columns is a linear combination of the others, the matrix R has at least one zero row. Therefore, we may use the ginv † function described in [6] in order to compute the matrix R , † † * and then make use of the formula A = R Q . The implementation of these ideas are presented in the qrginv function(see the Appendix). In the area of digital image processing the analytically form of a linear degraded image is given by the following equation : r
x out [ i , j ] =
m
∑∑x
in
[ k , l ] h[ i , j ; k , l ]
(1)
k =1 l =1
in which xin [ k , l ] is the original image and xout [i, j ] represents the measured data from where the original image will be reconstructed and h[i, j; k , l ] is a known Point Spread Function (PSF) that depends on the measurement system for i = 1 , 2 , … , r and j = 1 , 2 , … , m .
in
[ k , l ]h [ i − k ; j − l ]
(2)
k =1 l = 1
III.
RESTORATION OF A BLURRY IMAGE
Given xout (the digitized degraded image), then xin is the deterministic original image that has to be recovered. The relation between these two components in matrix structure is the following :
Hxin = xout ,
i) The range of AB is closed, ii)
m
∑∑x
(3)
where H represents a two dimensional ( r × m) priori knowledge matrix or it can be estimated from the degraded image using its Fourier spectrum. The vector xout , is of r entries, while the vector xin is of m(= r + n − 1) entries, where m > r and n is the length of the blurring process in pixels. The problem consists of solving the underdetermined system of equation (3). However, since there is an infinite number of exact solutions for xin that satisfy the equation Hxin = xout , an additional criterion that finds a sharp restored vector is required. Our work provides a new criterion for restoration of a blurred image including a fast computational method in order to calculate the Moore-Penrose inverse. The method retains a restored signal whose norm is smaller than any other solution. The criterion for restoration of a blurred image that we are using is the minimum distance of the measured data, i.e.,
min( xin − xout ), where xin are the first r elements of the unknown image constraint
xin that has to be recovered subject to the
Hxin − xout
2
= 0. In general, the PSF varies
independently with respect to both (horizontal and vertical) directions, because the degradation of a PSF may depend on its location in the image. An example of this kind of behavior is an optical system that suffers strong geometric aberrations. However, in most of the studies, the PSF is accurately written as a function of the horizontal and vertical displacements independently of the location within the field of view. IV.
THE GENERALIZED INVERSE APPROACH
A. Applications on a degraded image Following the analysis given in section III, there is an infinite number of exact solutions for xin that satisfy the equation
Hxin = xout , but from Proposition 2.3, only one of
them minimizes the norm unique vector by
Hxin − xout .We shall denote this
xin . So, xin can be easily found from the †
equation xin = H xout .
Figure 2. (a) Computational Time (b) ISNR.
The computational time provide another criterion of comparison as shown in Figure 2 (a).
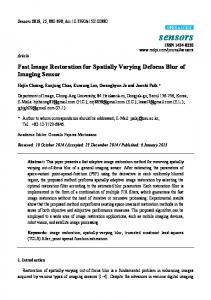
Figure 1. (a) Original image (b) Blurred image with n=30 (c) Deblurred image.
The rest of this section presents results that highlight the performance of the generalized inverse.Figure 1(a) shows such a deterministic original image. In Figure 1(b) we present the degraded image for n = 30 . Finally, in Figure 1(c) it is clearly seen that the details of the original image have been recovered. The Improvement in Signal to Noise Ratio (ISNR) is a criterion that has been used extensively for the purpose of objectively testing the performance of image processing algorithms. I S N R = 1 0 lo g 1 0
⎧ ⎪ ⎨ ⎪ ⎩
∑ [x i, j
∑
i, j
2 (i, j ) − x out (i, j ) ] ⎫ ⎪ , 2 ⎬ x ( i , j ) − x ( i , j ) [ in ] ⎪ in ⎭ in
xin and xout represent the original deterministic image and degraded image respectively, and xin is the corresponding where
restored image. The dotted line in Figure 2(b) shows the corresponding ISNR values for the reconstruction of the image under noise after the deblurring process took place.
B. Applications on a degraded and noisy image Noise may be introduced into an image in a number of different ways. The noise can be simulated by rewriting equation (1) as r
m
xout [i, j ] = ∑∑xin [k , l ]h[i, j; k , l ] + n[i, j ]
(4)
k =1 l =1
where n[i, j ] is an additive noise introduced by the system. In this paper the noise is image related which means that the noise has been added to the image. In Figure 3(a), we simulate a noise model where a number of pixels are corrupted and randomly take on a value of white and black (salt and pepper noise) with noise density equal to 0.02. The image that we receive from a faulty transmission line can contain this form of corruption. In Figure 3(b) we present the original image while a motion blurred and a salt and pepper noise has been added to it. Figure 3(c), demonstrates the result of applying a low pass rotationally symmetric Gaussian filter of standard deviation equal to 45. Accordingly, the broken lines in Figures 2(a) and 2(b), provide a graphical representation of the computational time and the ISNR (with noise), for the reconstructed and filtered image for different values of n .
APPENDIX Note that, qrginv function uses the ginv function from [6]. Matlab code for the qrginv function: function qrginv = qrginv(B) [N,M] = size(B); [Q,R] = qr(B); r = rank(R); R1 = R(1:r,:); R2 = ginv(R1); R3 = [R2 zeros(M,N-r)]; A = R3*Q'; qrginv = A; REFERENCES [1]
Figure 3. (a) Original image with noise (b) Degraded image (n=30) with noise (c) Restoration of a simulated degraded and noisy image.
V.
CONCLUSIONS
In this study, we introduce a computational method based on the calculation of the Moore-Penrose inverse of any matrix, with particular focus on problems arising in image processing. We are motivated by the problem of restoring blurry and noisy images via well developed mathematical methods and techniques based on the inverse procedures in order to obtain an approximation of the original image. By using the proposed algorithm, the resolution of the reconstructed image remains at a very high level, although the main advantage of the method was found on the fact that it can be applied in general matrices square or rectangular, full rank or not. The efficiency of the generalized inverse is evidenced by the presented simulation results. Besides digital image restoration, our work on generalized inverse matrices may also find applications in other scientific fields where a fast computation of the inverse data is needed.
R. Bouldin, The pseudo-inverse of a product, SIAM Journal on Applied Mathematics, Vol 24(4), 1973, pp.489-495. [2] M. R . Banham and A.K. Katsaggelos, Digital Image Restoration IEEE Signal Processing Magazine, Vol.14, 1997, pp.24-41. [3] R. Gonzalez, P. Wintz, Digital Processing, U.S.A., 2nd Ed. Addison Wesley Publishing Co., 1987. [4] S. Karanasios and D. Pappas. Generalized inverses and special type operator Algebras. Facta Universitatis(NIS), Series Mathematics and Informatics, Vol. 21, 2001, pp.41-48. [5] M. El-Sayed Wahed, Image Enhancement Using Second Generation Wavelet Super Resolution, International Journal of Physical Sciences Vol. 2, 2007, pp.149-158. [6] V.N. Katsikis and D. Pappas, Fast computing of the Moore-Penrose inverse matrix, Electronic Journal of Linear Algebra, Vol. 17, 2008, pp.637-650. [7] S. Chountasis, V.N. Katsikis and D. Pappas, Applications of the MoorePenrose inverse in digital image restoration (unpublished). [8] J. Ringrose, Compact non self adjoint operators. Van Nostrand London 1971. [9] J. Chantas, N. P. Galatsanos, and N. Woods, Super Resolution Based on Fast Registration and Maximum A Posteriori Reconstruction, IEEE Trans. on Image Processing, Vol. 16, 2007, pp.1821-1830. [10] H.J. Trussell and S. Fogel, "Identification and Restoration of Spatially Variant Motion Blurs in Sequential Images," IEEE Trans. Image Proc., Vol. 1, 1992, pp.123-126. [11] D. L . Tull and A.K. Katsaggelos, "Iterative Restoration of Fast Moving Objects in Dynamic Images Sequences " Optical Engineering, Vol. 35(12), 1996, pp.3460-3469.