media rely on the use of repeatable symbols|marks on paper|whose meaning ... is true if and only if snow is white; to know the meaning of the German .... conveys the nature of the represented object (e.g. house, church, well), while the.
Map Semantics Ian Pratt Department of Computer Science, University of Manchester, Manchester M13 9PL, United Kingdom
Abstract. Could there be a semantics of maps|a theory which would
stand in the same relation to maps as (ordinary) semantics stands in to (ordinary) languages? And what would such a theory look like? This paper addresses these questions from the standpoint of the doctrine that a semantics for a language is a theory which gives the truth-conditions for expressions in that language. We show how a semantics for certain simple sorts of maps can be constructed by analogy with minimal model semantics for the predicate calculus under default reasoning. We go on to show, however, that other sorts of maps challenge a fundamental assumption about truth-conditional approaches to semantics. In particular, we see how the gure/ground ambiguity inherent in some maps forces us to re-think the role played by the syntactical organisation underlying an account of truth-conditions.
1 Introduction Maps have much in common with written natural languages like English. Both media rely on the use of repeatable symbols|marks on paper|whose meaning is a matter of convention. Both media are useful for representing (and for misrepresenting!) the world about us. And both media are useful as aids to memory and reasoning. However, there are also di�erences. While maps are specialized to represent space, and have di�culty coping with disjunctive or uncertain information, English exhibits no such limitations. The basic vocabulary of English is vastly greater than the set of symbol-types employed on any map. And maps regularly exploit devices alien to English, such as using continuously variable symbols in an analog way (as when the size of a dot represents the population of a city). Most strikingly perhaps, maps di�er from languages like English in the similarities they bear to drawings and photographs. However stylized or conventional or arbitrary our mapping conventions may be, the resemblance between an aerial photograph and a map of the same scene is hardly deniable; the resemblance between an aerial photograph and page of the English describing the scene is nil.1 1
Comparisons between maps and languages are not uncommon, of course. See, for example, Robinson and Petchenik [8], Head [5] and [6], Schlichtmann [9] and Andrews [1].
If maps exhibit some similarities to, and yet some di�erences from, natural languages, what sort of theory might we construct to explain how maps represent the world? Could there be a semantics of maps|a theory which would stand in the same relation to maps as (ordinary) semantics stands in to (ordinary) languages? And what would such a theory look like? This paper is an attempt to at least begin to answer these questions. Semantics may be de ned as the study of linguistic meaning. Derivatively, we speak of a semantics for a language as a set of rules specifying the meanings of expressions in that language. Now, according to one prevalent school of thought within semantics, to give the meaning of an expression (in a language) is to state the conditions under which that expression would be true of false. For example, to know the meaning of the German sentence \Schnee ist wei�" is to know that it is true if and only if snow is white; to know the meaning of the German sentence \A pfel sind blau" is to know that it would be true if and only apples were blue; and so on. On this view, then, a semantics for a language is a theory which gives the truth-conditions for expressions in that language. It must be admitted that the view of a semantics as a speci cation of truth-conditions, while widespread and in uential, is by no means universally accepted. Nevertheless, it will serve here to anchor our comparison of maps with languages|to focus our attention on theoretically important issues. Since maps, like natural languages, represent the world, it makes sense to ask whether they do so correctly or incorrectly. To borrow terms familiar in the context of natural language, it makes sense to ask whether a map is true or false. This suggests the following formulation of our initial question concerning the possibility of a semantics of maps. Can we provide maps (or classes of maps) with a semantics, in the sense of a theory which speci es the conditions under which a given map makes true or false claims? If so, what will such a map semantics look like? How would it di�er from the semantics for other languages?
2 The semantics of arti cial languages and the semantics of maps In explaining the view that a semantics for a language is a theory giving the truth-conditions of its expressions, we cited as an example the truth-conditions of two (pretty simple) German sentences. Of course, serious attempts at semantics for natural languages attempt to give the truth-conditions for more considerable (in fact, in nite) fragments of those languages. Unfortunately, semantic accounts of even restricted parts of natural language are enormously complicated, and could not possibly be presented here. Moreover, the semantics of many common features of language are not well understood, and progress has been slow in investigating them. In order to get an idea for what a formal semantics for maps might look like, then, we can turn for inspiration not to natural languages, but instead to simple arti cial languages, for which a semantics|in the sense of a body of rules specifying truth-conditions|have been given. Of all these arti cial languages,
the simplest and most widely employed is the predicate calculus. The standard semantics for the predicate calculus is well-known, and hardly need be presented in detail here. However, it will help to remind ourselves of some of its principal features; the contrast with with maps will prove instructive. The predicate calculus allows us to make statements such as: man(socrates) Socrates is a man philosopher(plato) Plato is a philosopher 8x(man(x) ! mortal(x)) All men are mortal 9x(philosopher(x) ! wise(x)) Some philosophers are wise The standard semantics for this language, due to Tarski, takes the form of rules specifying in the truth-conditions of the above formulae. The key idea behind this a semantics is that of a structure. A structure M consists of a domain D, which is just any set of entities, together with an interpretation function I, which links the symbols in the language to the elements of the domain. For example, the interpretation of a name|say, \socrates"|is simply an element of D (intuitively, the man socrates); the interpretation of a predicate|say, man( )|is simply a set of elements of D (intuitively, the set of elements which have the property of being a man). The rules for determining the truth-conditions of quanti ed formulae are complicated to state, and would involve us here in too much irrelevant detail. But the important point is that such rules determine, for any formula � and any structure M, the truth-value of � in M. Thus, the semantics for the predicate calculus gives the truth-conditions of formulae by specifying the structures in which they come out true. One last detail: given a collection, T, of predicate calculus formulae, we say that T is true in a structure M just in case all of the formulae in T are individually true in M. In that case, it is customary to speak of M as being a model of (the formulae in) T. We will return to this detail later. With that brief excursion into the semantics for the predicate calculus behind us, we now come to examine the prospects for a parallel semantics for maps. To x our ideas, let us consider the simple map of g. 1, which we can take to indicate the locations of certain sorts of buildings in a village using the symbols 2 (house), y (church) an � (well). Schlichtmann[9] has proposed that these symbols can be analyzed as complexes of `substantive' and `locational' components. The substantive component, encoded by features of the icon other than its location, conveys the nature of the represented object (e.g. house, church, well), while the locational component, encoded by the position of the icon on the map, conveys the location of the represented object in the obvious way. Thus, a church-icon is seen as having a structure: y + (x; y) (1) much as a formula in the predicate calculus is seen as being made up of its names, predicates and other symbols.2 Of course, the syntactic structure of map 2
For the sake of comprehensibility, I have been deliberately sloppy when it comes to distinguishing positions on the maps from the numerical coordinates corresponding to them.
M. If we take a map such as that of g. 1 to be a collection, T, of symbol-pairs such as (1), we might be tempted to say: map T is true in a structure M, just in case all of the individual symbol-pairs in T is true in M. But this, it turns out, would lead to most unintuitive results. One feature of maps that we have not mentioned so far is that the absence of symbols can convey information. Thus, in the map of g. 1, the absence of a church-icon at a particular location|i.e. the non-occurrence of a symbol-pair of the form (1) in the map|represents the fact that there is no church at the corresponding point in space.3 That is why we cannot adopt the above rule for evaluating the truth of whole maps with respect to a structure: a map should come out as false if it fails to mark church at a place where, in fact, there is one. We might say, in view of this observation, that maps can represent information by default. How can we modify the kind of formal semantic account suggested above to capture representation by default? Again, we need look no further than the predicate calculus for inspiration| speci cally, at recent work in arti cial intelligence on the representation of information by default in this type of formalism. Consider the following collection of formulae: 8x((bird(x)&:ab(x)) ! ies(x)), bird(tweety), bird(oscar), ab(oscar), oscar 6= tweety with the intuitive interpretation that all birds which are not abnormal y, that Tweety and Oscar are (distinct) birds, and that Oscar is abnormal. Let us denote this set of formulae by T. Notice that these formulae T say nothing about whether Tweety is abnormal or not; they simply leave the matter open. (Hence they leave open the question of whether Tweety can y or not.) In terms of the normal semantics for the predicate calculus: there are models of T in which Tweety is abnormal and does not y, as well as models in which Tweety is not abnormal and does y. But suppose we wanted to assume that, in the absence of any reason to the contrary, Tweety is not an abnormal bird|after all, most birds are normal|and so can y. More generally, we might make the assumption that things are not abnormal unless it is stated otherwise. In making this assumption, we are, in e�ect, encoding information by default. For the mere absence of the assertion that something is abnormal is tantamount to asserting its normality, just as the absence of a church-icon at a point on a map asserts the non-existence of a church at the corresponding location. How, then, can the truth-conditional semantics be modi ed to allow the encoding of information by default? A number of possibilities have been proposed 3
It is worth pointing out that the view that maps represent information by the absence of symbols requires some quali cation, as Andrews [1], p. 15, makes clear. However, we shall assume that the maps we are concerned with here are to be understood in this way.
in recent years, but by far the most interesting and intuitive is an idea of minimal
model semantics, which we brie y review here.
We mentioned above that the formulae T have some models in which Tweety is abnormal; this is because T includes no formula saying whether Tweety is abnormal or not. But suppose we con ne our attention to those models of T in which the extension of predicate ab( ) is as small as possible. We can then say that a set of formulae T is true in any structure M, just in case the individual formulae in T are true in M, and the extension of the predicate ab(x) in M is minimal. That way, things get counted as normal unless they have been declared (explicitly or implicitly) to be abnormal. This approach to semantics involves numerous technical complications, especially when it comes to de ning exactly what we mean when we say that a structure is one in which the extension of a predicate is minimal. But again we need not concern ourselves with these details here; since they have been satisfactorily worked out elsewhere.4 What is important is to see how such a semantics can yield a solution to the problem of encoding information by default. A semantics which takes the interpretation of a set of formulae to be the set of models in which as few things are abnormal as possible means that the absence of a formula saying that Tweety is abnormal e�ectively encodes the information that Tweety is not abnormal. Thus, the fact that maps represent information by default need not be a problem when it comes to providing them with a formal semantics. We might say that a map T (considered as a set of symbol-pairs) is true in a structure M, just in case the individual symbol-pairs in T are true in M, and the extensions of the predicates church, school, house etc. in M are minimal. That way, structures locating objects where the map declares no object to be (by being blank) would be excluded from the map's interpretation, because they would not be minimal. So far, we have sketched an account of how the semantics of certain simple sorts of maps|speci cally, those such as g. 1 involving located icons|might be presented. And we have seen that the resulting semantics, while di�erent from the semantics of a language like the predicate calculus, will nevertheless be, in broad outline, familiar, and introduces no fundamentally new notions. Our concern in the sequel, however, will be with a quite di�erent aspect of maps which, as we shall see, challenges a basic assumption about what we expect from a formal semantics. First, however, we need to step back, and take a broader view of the enterprise of semantics.
4 Syntactic structure, truth-conditions and use The semantics of the predicate calculus, with or without minimization conventions, takes for granted a particular decomposition of the expressions in that language into constituent symbols: names, predicates, variables, connectives and quanti ers, together with various syntactic devices for combining those symbols 4
For a full technical account of minimal model semantics in AI, see, for example, Brewka [2], ch. 4.
into formulae. But it is important to realize that this decomposition is not only important when it comes to explaining the truth-conditions of formulae: it is also important in explaining the operation of any system which uses these formulae. One of the attractive features of formal languages is that their expressions can be manipulated according to precise rules, in particular, according to rules contained in a computer program. That is why such languages are so fundamental in AI: computers can use them for reasoning. Now, when expressions in the predicate calculus are used in reasoning, they are operated on by processes sensitive to their syntactic structure. Consider a theorem-proving program inferring the conclusion mortal(socrates) from the premises man(socrates) and 8x(man(x) ! mortal(x)). What that theorem-prover must do is to detect a certain pattern in the syntactic structure of the premises, and to perform manipulations on that structure to generate the conclusion. In other words, the symbols in the formal language|more precisely, their physical instantiations in a computer|are the raw material for the theorem-proving processes. Any explanation of that process must recognise the relevant symbols as constituents of the formulae being manipulated. Hence we see that the syntactic structure of expressions in a language can play a double role. First, it is fundamental to the semantics for that language, in that the rules specifying the truth-conditions of formulae make reference to the symbols in those formulae and the way they are combined. Second, it is fundamental to understanding the way formulae in that language are manipulated in reasoning, because reasoning processes which use formulae must be causally sensitive to their syntactic structure. Now of course, these remarks are not in themselves particularly surprising. Obviously, syntactic structure is important to semantics; and obviously, processes for manipulation of representations must be causally sensitive to their syntactic structure. However, when we come to consider the case of maps, we will nd ourselves confronted by a more complex situation in which there is no unique decomposition into symbols that is appropriate both for specifying truth-conditions and for explaining use. This, we shall argue, constitutes a crucial di�erence between maps and languages such as the predicate calculus. The main observation of this section is the following. The imposition of syntactic structure on a representational medium|its decomposition into symbols and their modes of combination|may serve as a vehicle for more than one task. We have identi ed two such tasks: (i) a speci cation of the truth-conditions of expressions in that language and (ii) an account of how expressions in that language are processed by those who use them. This distinction will prove crucial when it comes to comparing maps with language.
5 Figure/ground ambiguity and syntactic ambiguity In section 2, we sketched some semantic rules for maps involving a collection of located icons, such as that of g. 1. In the present section, we examine a di�erent
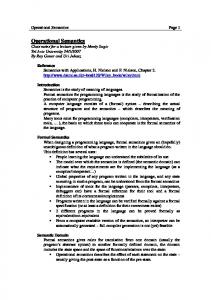
kind of map, and pose the question of what a formal semantics for this kind of map might look like. Consider the maps of g. 2a){c), which show a number of lakes (dark) and islands (light). The question we need to answer before trying to give a for-
resented by symbols, while the other is represented by absence of symbols. This option comes in two versions: (a) The symbols are the patches representing land, and the background, i.e. those parts of the map covered by no symbols, the patches representing water. In g. 2c), the land-symbols are not simply connected (i.e. they have holes in them), and the background shows through the holes. (b) The symbols are the patches representing water, and the background, i.e. those parts of the map covered by no symbols, the patches representing land. In g. 2c), the water-symbols are not simply connected (i.e. they have holes in them), and the background shows through the holes. 2. The patches representing water and those representing land are both symbols. Again, these water- and land-symbols are not in general simply connected (i.e. they have holes in them), but each hole is exactly lled by a symbol of the other type, so that the two types of the symbols together cover the map completely, without overlapping. 3. The closed curves representing the outlines of bodies of water or the outlines of bodies of land are symbols. Notice that one such closed curve (say, corresponding to the outer boundary of a lake) make have other closed curves (corresponding to the outer boundaries of islands) within it; these may in turn have yet more closed curves within them, and so on, up to arbitrary depth. There is an alternative (and, assuming that the map is drawn on an ordinary piece of paper, technically equivalent) way of viewing this option. Instead of taking the symbols to be closed curves on the map, we can take them to be the simply-connected regions (i.e. regions with no holes in them) inside those closed curves. And we allow that a small lake-symbol may be superimposed on top of part of an island symbol, and vice versa, up to arbitrary depth. On this view, then, the two types of the symbols together cover the map completely, but do not have holes in them and are in general overlaid one on top of the other. Corresponding to the three options for symbolic decomposition above, we might suggest the following semantics rules for giving the meanings of such maps (we use � throughout to denote the function taking points on the map to the physical points they represent): 1. The semantics for the rst option must again be given in two versions: (a) Let L be a map symbol (a connected dark region of the map surface). The symbol L is true in a structure M, just in case, for all points (x; y) on the map, if (x; y) is in L, then the point �((x; y)) is on land according to M. An entire map is true in a structure M if (i) all the symbols L in that map are true in M, and (ii) there is no other structure M in which all the symbols in the map are true, and such that the set of locations on land in M is a subset of the set of locations on land in M. (In other words, we insist that M is a land-minimal model of the map.) 0
0
(b) Let L be a map symbol (a connected light region of the map surface). The symbol L is true in a structure M, just in case, for all points (x; y) on the map, if (x; y) is in L, then the point �((x; y)) is on water according to M. An entire map is true in a structure M if (i) all the symbols L in that map are true in M, and (ii) there is no other structure M in which all the symbols in the map are true, and such that the set of locations in water in M is a subset of the set of locations in water in M. (In other words, we insist that M is a water-minimal model of the map.) 2. This time we suppose that the map is a collection symbols-pairs of the form hl; Li or hw; Li where L is again a connected region of the map surface, and l and w are symbols indicating the shading (w for dark and l for light). Symbol-pairs of the former type (the light patches) denote land, and those of the latter type (the dark patches) denote water. The symbol-pair hl; Li is true in a structure M, just in case, for all points (x; y) on the map, if (x; y) is in L, then the point �((x; y)) is on land according to M The symbol-pair hw; Li is true in a structure M, if and only if, for all points (x; y) on the map, if (x; y) is in L, then the point �((x; y)) is on water according to M. An entire map is true in a structure M if all the symbol-pairs hl; Li and hw; Li are true in M. (There is no need for any minimal model semantics here, for there is no representation by default. Assuming that the symbols really do cover the map without gaps, the status of any point (land or water) with in the region covered by the map is decided, since every point on the is covered by exactly one symbol.) 3. Here, we take the map to consist of a set of symbol-pairs hl; � i (closed curves enclosing light patches) and hw; � i (closed curves enclosing dark patches). A symbol-pair hl; � i is true in a structure M if, for all points (x; y) within � such that there is no hw; i with inside � and with (x; y) inside , �((x; y)) is on land. A symbol-pair hw; � i is true in a structure M if, for all points (x; y) within � such that there is no hl; i with inside � and with (x; y) inside , �((x; y)) is on water. An entire map is true in a structure if all the symbol-pairs hl; � i and hw; � i are true in that structure. (Thus we have a default semantics in which more speci c symbols|those enclosing smaller areas|override less speci c ones. This kind of semantics is again familiar from AI, and can be put on a formal basis in a number of ways. One such way involves a minimal model approach, where the de nition of a `minimal' model is modi ed so as to make more speci c symbols take priority over less speci c ones when it comes to deciding which models are minimal. However, the technical details are far too complex to spell out here.5 ) 0
0
5
See, for example, Brewka [2], section 4.3
Thus we see that of the three methods of decomposing the maps of g. 2 into symbols lead to three di�erent accounts of the semantics of those maps. Yet each is, from the point of view of specifying the truth-conditions of those maps, equally adequate, since they all in the end lead to the same truth-conditions. The map itself|the pattern of coloured patches|is neutral on the question of how those patches are organised into symbols and their modes of combination, just as a drawing or photograph is neutral as to how the marks it contains should be perceived. The map itself does not decide what is gure (the symbols) and what is (back)ground. In that sense, the map can be said to be syntactically ambiguous: there is more than one option when it comes to imposing a syntactic structure on the map in order to provide it with a semantics. Nothing like this sort of syntactic ambiguity is observed for arti cial languages such as the predicate calculus. With such languages, we begin with the individual symbols and their modes of combination: there can be no question of the sort of gure/ground ambiguity that can arise with maps such as those of g. 2. The main observation of this section the following. When giving a semantics for maps such as those of g. 2, a number of options present themselves, depending on how the map is to be decomposed into symbols, or, as we put it, depending on what syntactic structure we impose on the map. There is more than one syntactic structure in terms of which adequate semantic rules can be given. The map itself is neutral with respect to these di�erent syntactic structures. Nothing like this phenomenon is observed for arti cial languages such as the predicate calculus.
6 Figure/ground ambiguity and the use of maps In section 4, we observed that the imposition of syntactic structure on a representational medium may serve as a vehicle for two tasks: (i) a speci cation of the truth-conditions of expressions in that medium and (ii) an account of how expressions in that medium are processed by those who understand them. In section 5, we observed that an account of the truth-conditions of maps such as those of g. 2 could be given equally well in three di�erent ways, with each way corresponding to the imposition of a di�erent syntactic structure on the map. These observations lead to the following question. Given that the di�erent methods of syntactic decomposition of maps can all be made the basis of adequate truth-conditional semantics, are these three decomposition methods all equally suited to an account of map-use? For example, when humans (or computers) read maps, which aspects or features of the maps are the items on which the relevant psychological processes (or programs) involved operate? The answer is, of course: it depends on what the map is being used for. Consider the map of g. 3, and let us suppose that we are using the map to plan a route between two lakeshore points, X and Y . We distinguish two cases: rst, the journey is to be undertaken in a boat, and the route proceeds over water, with the islands regarded as obstacles; second, the journey is to be undertaken
in a jeep, and the route proceeds over land, with the lakes regarded as obstacles.
point that the way to organise a map into symbols depends critically on what the reader wants the map for (on a given occasion). The map itself is neutral on this question of distinguishing gure from (back)ground; it is the map reader who is responsible for this. Put another way: the map itself is neutral on the question of how it is decomposed into symbols|islands or lakes, buildings or courtyards, elds or eld-boundaries; it is the map reader who must organise what he perceives into units that serve his current reasoning purposes.9
7 Can there be a formal semantics for maps? In arti cial languages, expressions have a canonical syntactic decomposition. And the symbols of the language|the ultimate components of any expression| must be recognised both by an account of the truth-conditions of expressions in the language, and by any account of how expressions in that language (or datastructures which mirror them) might be used in thought or communication. We illustrated this dual role of syntactic structure in the case of the predicate calculus. To some extent, the same is true of maps. Some aspects of representation in maps, such as the use of icons to represent items such as churches or rail stations, exhibit the kind of obvious and canonical syntactic structure characteristic of arti cial languages (even though it is typically much simpler). The account we sketched of the truth-conditions of maps such as that of g. 1 certainly relied on this symbolic decomposition. It seems reasonable to assume that an account of the way map readers understand such maps must do so as well: anyone who understands the map of g. 1 must perceive the squares, circles, etc. as repeatable gures, located at various points on a blank (back)ground. Other aspects of representation in maps, however, are di�erent. We considered, as an example, the di�erentiation of land from water by lines or coloured regions. (We might just as well have considered the marking of buildings as black patches on a white background, or the depiction of farmland divided by walls and hedges and ditches using linear features.) Such maps admit of many di�erent kinds of organisation into component structures, each one requiring di�erent sorts of semantic rules to give the intended truth- conditions. Yet it is a crucial feature of the map that it remains resolutely neutral as to which of these syntactic decompositions should be imposed on it. For, when we consider how the map is used, we must recognise that di�erent reasoning tasks require di�erent perceptual organisations of the map into signi cant components; and there is apparently no basic level of signi cance common to all of these processes, and which could support a sensible account of the map's truth-conditions. It is this organisational ambiguity, then, so essential to maps yet so completely eschewed by arti cial languages, that constitutes an essential di�erence between them. Can there be a formal semantics for maps? Well, yes and no. Yes: 9
system, see Worboys [10]. The role of the reader in determining the syntactic structure of maps is discussed in detail in Head [5] and [6]; we need not go into greater detail on this point here.
by imposing a syntactic structure on a map, we can provide rules which give its truth-conditions. But whichever syntactic structure we impose, we will end up recognizing as symbols units which play no part in the explanation of how maps are used for some reasoning tasks. For it is part of the very essence of maps| what sets them apart from arti cial languages like the predicate calculus|that they exhibit this sort of ambiguity. Thus, the attempt to extend the ideas of formal semantics to maps leads us to new insights about what we take a semantics to be, and what we expect of it. In particular, we saw how, in arti cial languages for which a formal semantics has been supplied, it is taken for granted that the syntactic structure presupposed by the semantic rules also plays a role in any understanding of how expressions in those languages are processed. We have argued that this assumption of the dual role of syntactic structure may have to be abandoned in the case of maps. Whatever we decide about the the best way to give an account of the truthconditions of maps|and we have suggested that there will in general be more than one option|the separation of semantic from processing concerns will have to be recognized.
References 1. Andrews, J.H. \Map and Language/ A metaphor extended", Cartographica vol. 27, 1 (1990), pp. 1{19. 2. Brewka, G. Nonmonotonic Reasoning: Logical Foundations of Commonsense, Cambridge: CUP, 1991. 3. R. Brooks. Solving the Find-Path Problem by Good Representation of Free Space. Proceedings, AAAI. Los Altos, CA: Morgan Kaufmann 1982, pp. 381{386 4. D. Chubb: An introduction and analysis of a straight line path algorithm for use in binary domains. In A. Kak and Su-shing Chen (eds.): Spatial Reasoning and Multi-Sensor Fusion: Proceedings of the 1987 workshop, Los Altos, CA: Morgan Kaufmann, 1987, pp. 220{229 5. C. Grant Head: The map as natural language: a paradigm for understanding. In C. Board (ed.): New Insights in Cartographic Communication. Cartographica Monograph 31, University of Toronto 1984, pp. 1{32 6. C. Grant Head: Mapping as language or semiotic system: review and comment. In David M. Mark and Andrew U. Frank (eds.): Cognitive and Linguistic Aspects of Geographic Space. NATO ASI series D: Behavioural and Social Sciences vol. 63. Dordrecht: Kluwer 1991, pp. 237{262 7. D. Kapur and J.L. Mundy (eds.): Arti cial Intelligence 37(1{3), Special volume on geometric reasoning, (1988) 8. Arthur H. Robinson and Barbara Bartz Petchenik: The nature of maps. London and Chicago: University of Chicago Press, 1976 9. Hansgeorg Schlichtmann: Characteristic traits of the semiotic system `Map Symbolism'. The Cartographic Journal 22, 23{30 (1985) 10. Michael F. Worboys: A generic model for planar geographical objects. International Journal of Geographical Information Systems, 6(5), 353{372 (1992).
This article was processed using the LaTEX macro package with LLNCS style