International Journal of Computer Science Research and Application 2012, Vol. 02, Issue. 02, pp. 02-10 ISSN 2012-9564 (Print) ISSN 2012-9572 (Online) © Authors retain all rights. IJCSRA has been granted the right to publish and share, Creative Commons3.0
INTERNATIONAL JOURNAL OF COMPUTER SCIENCE RESEARCH AND APPLICATION www.ijcsra.org
Object Detection and Segmentation using Local and Global Property Chirag I Patel1, Ripal Patel2, Ankit Thakkar3 1,3
Institute of Technology, Nirma University, Ahmedabad, Gujarat, Email:
[email protected] 3Email:
[email protected] 2 Dharmsinh Desai Institute of Technology,
[email protected]
1
Abstract Object detection and segmentation are critical task for many computer vision applications; they provide classification of the pixels into either foreground or background. In this paper, a new algorithm of objects detection and segmentation is proposed. Traditional approaches to object detection only look at local pieces of the image, whether it will be within a sliding window or the regions around an interest point detector. However, such local pieces can be ambiguous, especially when the object of interest is small, or imaging conditions are otherwise unfavourable. This ambiguity can be reduced by using global features of the image.
Keywords: Object detection, Image Segmentation, Gabor filter, Gaussian filter
1. Introduction Detection and Segmentation of objects can be viewed as lower level vision tasks to achieve higher level event understanding. Object detection is an important, yet challenging vision task. It is a critical part in many applications such as image search, image auto-annotation and scene understanding; however it is still an open problem due to the complexity of object classes and images. Simplest approaches for detection and segmentation of object in image start from lower level image feature like edges or segments. And Complex Approaches end to shapes, contours and texture information. In this paper, Combination of simplest approach and complex approach is used. Local property of image is considered as texture as low frequency content and it’s defined by Gabor filter or Gaussian filter. And Global feature is Mean value of an image.
2. Previous Work 2.1 Object detection In [1] Moment invariant, Shape descriptor, is used to identify the object from the captured image using the first invariant. It is invariant under rotation, scale and shifting. The technique is widely used to extract the global features for pattern recognition due to its discrimination power and robustness. It has success rate of 90%. Sometimes shape is already defined to find respective object as [2] has done. In this the shape Elliptical is already defined. Through geometric symmetry, centre of ellipse is defined and then classifying boundary. The approach is very fast compared to other existing method as well simple and easy to implement.
3
International Journal of Computer Science Research and Application, 2(2):02-10
The approach proposed by Viola P and Jones uses a cascade of small Haar-like feature based classifiers each of them trained to detect the specified objects and to reject a significant fraction of the other objects. The input image is partitioned into many overlapping sub-windows of different sizes. The algorithm classifies each sub-window into either representing the object or not [3]. nowadays most object detection algorithms depends on image transform then after applying transform to the image feature are found. And using that features system is trained to learn object detection. Schneiderman uses a three level wavelet transform to convert the input image to spatial frequency information. One then constructs a set of histograms in both position and intensity. The intensity values of each wavelet layer need be quantized to fit into a limited number of bins, once the higher energy bins are finding then its apply to Bayesian network.[4,5,6,7]. One problem was encountered in early technique is insufficiency of high power frequency content in image. But later on problem is solved using exponential quantization. Problems with this method are time consumption and need much space. And this method is based on patch so its become costly. Approach proposed by Robin and Hee [8] applied wavelet decomposition on image and then finding out orthogonal features and apply it to the supervised linear classifier. Another method is investigated was proposed by Rikert, Jones, and Viola [9]. In this approach textural information is learned and used for classification. We proceed by transforming the images, and then build a mixture of Gaussian model based on the result of k-means clustering applied to the transformed image. Another approach was proposed by Viola and jones [10]. In this image is represented by ‘integral image’ feature which can be computed fast. Then learning algorithm AdaBoost is applied then combined classifier so that computationally focusing on object detection rather background. They use wide face database which is difficult and also time consuming. One approach is proposed by Chirag and Ripal [13]. Different approaches are presented and examine difficulties of video based object detection. Performance of this approach is stable against illumination changes, small changes in background as well against shadow. In this approach first background image is formed and compared to video. Background modeling is done by Gaussian mixture model. Then video is observed and background is calculated and updated again and finally background model represent scene without object of interest.
2.2 Object segmentation For segmenting an object form an image the basic technique is used is thresholding. And for multiple objects multiple level thresholds are used. But thresholding don’t give exact results so further complex approach are implemented. And there are some region based segmentation technique is used. Region growing is procedure in that formation of groups of pixels makes large region based on some predefined criteria like gray level or color etc. Grouping is formed based on connectivity or adjacency. Then further technique is region splitting and merging. The technique is similar to region growing but in this first we are splitting region and then we are again split or merge that region. Object segmentation can also be done using morphological operation.
3. Our Approach Our basic aim is to detect and segment the object from the Image and it is shown in figure 1. In introduction we specify how previous work has been done for the object detection and segmentation. Here we are specifying our approach for Object detection and segmentation. In this object detection and segmentation process we are using RGB image not Grayscale image. Though it takes more processing time but it gives significant result for the RGB image.
4
International Journal of Computer Science Research and Application, 2(2):02-10
Original image
Applying Lowpass filter
Image Average
Image subtraction
Blob creation (object detection)
Object Segmentation
Figure 1. Basic flow of object detection and segmentation
Step-1:Step-2:Step-3:Step-4:Step-5:Step-6:-
Here we Take RGB image as our INPUT Apply Low pass-filter to the input image. Take Image average. Take Subtraction of Step:-2 and Step:-3 Create the Blob using the morphological operation base on the image. Detected object will segmented.
4. Low Pass Filter Lowpass filters are used for blurring and for noise reduction. Blurring is used in pre-processing tasks, such as removal of small details from an image prior to large object extraction, and bridging of small gapes in lines or curves.
4.1 Gaussian filter A Gaussian filter is easy to define and to implement. One can easily shape Gaussian filter. It has same shape in frequency as in spatial domain so one can easily guess. Also the Fourier transform and inverse transform of Gaussian filter is Real function. Gaussian filter smoothes an image by calculating weighted averages in a filter co-efficient. Gaussian filter modifies the input signal by convolution with a Gaussian function. In two dimensions, Gaussian filter is the product of two such Gaussians, one per direction:
g ( x, y ) =
1 2πσ 2
e
x2 + y 2 − 2σ 2
Where, x is the distance from the origin in the horizontal axis, y is the distance from the origin in the vertical axis and σ is the standard deviation of the Gaussian distribution. When applied in two dimensions, this formula produces a surface whose contours are concentric circles with a Gaussian distribution from the centre point. Values from this distribution are used to build a convolution matrix which is applied to the original image. Each pixel's new value is set to a weighted average of that pixel's neighbourhood. The original pixel's value receives the heaviest weight (having the highest Gaussian value) and neighbouring pixels receive smaller
5
International Journal of Computer Science Research and Application, 2(2):02-10
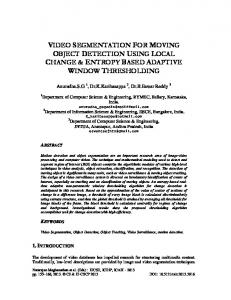
weights as their distance to the original pixel increases. In fig.1 the frequency response of the 2D Gaussian is shown, it is a low pass filter.
Figure . 2 Plot of frequency response of the 2D Gaussian filter
4.2 Gabor filter Gabor describes a combination of sinusoidal wave and Gaussian envelope. A two-dimensional Gabor filter can be design for any frequency and orientation. One can tune orientation anf frequency of Gabor filters and that is biggest advantages. Gabor proposed to expand a function into a series of elementary functions, which are constructed from a single building block by translation and modulation. In general, a two-dimensional Gabor function is expressed as [11][12]:
( −π ( a x +b y )) .e( j ( 2π F ( x cos w+ y sin w))) 2 2
G ( x, y ) = e
2 2
Where, a and b are, standard deviation in x and y direction respectively, scaling parameters of the filter and determine the effective size of the neighborhood of a pixel in which the weighted summation takes place. Parameter a and b also define spreading of Gaussian envelope in x and y direction respectively. F is radial frequency of the sinusoid and w specifies the orientation of the Gabor filters. Gabor filters can be configured to have various shapes, bandwidths, center frequencies and orientations by the adjustment of suitable parameters. By varying these parameters a filter can be made to pass any elliptical region of spatial frequencies. Means you can design lowpass, highpass and bandpass filter using only one filter. It is also used to emphasize particular texture region in image. Because basically texture is define by group of gray pixels having same gray levels repeated in pattern in specified direction by some interval. So its defined spatial frequency and that frequency parameter is used to design Gabor filter and hence the specified texture in image is enhance by Gabor filter. In this paper, Gabor filter is used to design lowpass filter. Because the need is here to emphasis low variation texture means lower frequency content in image.
Figure. 3 2-D frequency response of Gabor filter
6
International Journal of Computer Science Research and Application, 2(2):02-10
2000
Magnitude
1500
1000
500
0 1 0.5
1 0.5
0
0
-0.5 Fy
-0.5 -1
-1
Fx
Figure. 4 3-D frequency response of Gabor filter
4.3 Image Average Image average is measure of average intensity of the pixels in image. It is global property of image as well DC component of image. Average value of intensity of an image can be obtained by summing the values of all its pixels and dividing the sum by the total number of pixels in image. It is used to make the operator more robust. Image average can be defined as: L −1
m = ∑ ri p ( ri ) i =0
Where, r denotes intensity values from the range [0, L-1]. Where, L-1 is maximum intensity value of image.
5. Results and Discussion
Figure 5. Input image
Figure 6. Output image
7
International Journal of Computer Science Research and Application, 2(2):02-10
Figure 7. Input image
Figure 8. Output image
Figure 9. Input image
Figure 10. Output image
Figure 11. Input image
Figure 13. Input image
Figure 12. Output image
Figure 14. Output image
8
International Journal of Computer Science Research and Application, 2(2):02-10
Figure 15 Input image
Figure 16 Output image
Figure 17. Input image
Figure 18. Output image
Figure 19. Input image
Figure 20. Output image
9
International Journal of Computer Science Research and Application, 2(2):02-10
Figure 21 Input image
Figure 23. Input image
Figure 22. Output image
Figure 24. Output image
Extracting information is basic concern with the field of computer vision field. The task of object detection and segmentation are first step in many computer vision methods and serves to simplify the problem by grouping the pixels in the image in logical ways. • For figure 5, 7 and 9 the results are getting exactly. In the figure 6 the person as well as his shadow is detected as expected. Even though the object size is bigger or smaller than background it doesn’t affect our results. • In figure 11 three person are there in the image. We get perfect result but some part of middle person is detected as background. Reason is colour of that person’s clothes is matched with background and our algorithm is majorly based on pixel intensity So small patch of objet is detected as background. • In figure 13, image having object as animal is also detected correctly without very small patch of that animal having almost same intensity as background. • For figure 15, 17 and 19 human objects are detected correctly. In figure 18 small patch is incorrectly detected. All of three images have different background though it is giving good result. So our algorithm is background independent and we don’t need to estimate background.
• Results of images shown in figure 21 and 23 are getting correct. In figure 22, flower is correctly detected from background having stones and grass. Even though background has lots of variation in intensities, object is detected correctly. In figure 24, Pawn is shown on map and background has lots of variation pawn is correctly detected.
4. Conclusion In this correspondence, we have proposed method for locating the object and the segment it. Our method not only detects object positions but also gives the segmentation of objects. This method is generalized to many object classes. Results show that our detection algorithm can achieve both object detection and object segmentation. However there are still some hypotheses that cannot be pruned. More information like shape should be explored to prune these hypotheses.
10
International Journal of Computer Science Research and Application, 2(2):02-10
References [1] Mohamed Rizon, Haniza Yazid, Puteh Saad, Ali Yeon Md Shakaff, Abdul Rahman Saad, Mohd Rozailan Mamat, Sazali Yaacob, Hazri Desa and M. Karthigayan American Journal of Applied Sciences 2 (6): 1876-1878, 2006 [2] Chun ta Ho and Ling Hwei Chen High speed algorithm for elliptical Object detection IEEE transaction on image processing, Vol. 5, No. 3, March 1996 [3] Viola P and Jones M. Rapid object detection using a boosted cascade of simple features. In: CVPR, 2001. [4] H. Schneiderman. A statistical approach to 3d object detection applied to faces and cars, 2000. [5] H. Schneiderman. Learning statistical structure for object detection, 2003. [6] H. Schneiderman. Feature-centric evaluation for efficient cascaded object detection.2004. [7] H. Schneiderman. Learning a restricted bayesian network for object detection., 2004. [8] Robin N. Strickland and Hee Il Hahn Wavelet Transform Methods for Object Detection and Recovery IEEE transactions on image processing, VOL. 6, NO. 5, MAY 1997 [9] P. Viola T. Rikert and M. Jones. A cluster-based statistical model for object detection.1999. [10] Paul Viola Michael Jones Robust Real-time Object Detection second international workshop on statistical and computational theories of vision – modeling, learning, computing, and sampling vancouver, canada, july 13, 2001. [11] D. Gabor, “Theory of Communication,” J. Inst. Elect. Eng., vol. 93, pp. 429-457, 1946. [12] Z.Q. Liu, R.M. Rangayyan, and C.B. Frank, “Analysis directional features in images using Gabor filters,” in Proc. 3rd Annual IEEE Symp. on Computer-Based Medical Systems, pp. 68-74, 1990. [13] Chirag Patel and Ripal Patel . Gaussian mixture model based Moving object detection from video sequence ICWET 2011(Feb) MUMBAI conference proceeding published by ACM digital library.
A Brief Author Biography Chirag I Patel is pursuing Ph.D. in Computer Science & Engineering from Nirma Institute of Technology, Ahmedabad, Gujarat, India. He received B.E. in Information Technology Engineering from A.D.Patel Institute of Technology, New Vallabh Vidyanagar, Gujarat, India, in 2006, and the M.Tech. in Computer Science & Engineering from Nirma Institute of Technology , Ahmedabad, Gujarat, India in 2009. His research interests are in video processing, statistical image processing and 3D vision. Ripal Patel obtained the B.E. degree in Electronics & Communication Engineering from A.D.Patel Institute of Technology, New Vallabh Vidyanagar, Gujarat, India, in 2006, and the M.E. in electronics & communication Engineering from Dharamsinh Desai University, Nadiad, Gujarat, India in 2009. Her research interests are Computer Vision, Texture Classification, Video Processing and Image Registration. Ankit Thakkar is pursuing Ph.D. in Computer Science & Engineering from Nirma Institute of Technology, Ahmedabad, Gujarat, India. He received M.Tech. in Computer Science & Engineering from Nirma Institute of Technology, Ahmedabad, Gujarat, India. His research interests are in Wireless Sensor Networks, Image processing and Embedded systems.
Copyright for articles published in this journal is retained by the authors, with first publication rights granted to the journal. By the appearance in this open access journal, articles are free to use with the required attribution. Users must contact the corresponding authors for any potential use of the article or its content that affects the authors’ copyright.