well as to power system testing. The basic idea of a PHIL simulation is to extend the applicability of a Hardware-in-the-. Loop simulation by introducing a power ...
Power Hardware-in-the-Loop Implementation and Verification of a Real Time capable Battery Model Christian Seitl, Johannes Kathan, Georg Lauss, Felix Lehfuß AIT Austrian Institute of Technology Electric Energy System - Energy Department Vienna, Austria Email: {christian.seitl, johannes.kathan, georg.lauss, felix.lehfuss}@ait.ac.at Abstract—For this contribution a generic and real time capable battery model was implemented within a dedicated Power Hardware-in-the-Loop (PHIL) simulation environment. This was done in order to investigate its implementability and accuracy for PHIL simulations. PHIL simulations offers major benefits to battery inverter tests as reproducibility increases and the preparation time can be reduced significantly. Following a discussion of real time capable battery models, the implemented model is validated with measurement data of a real battery. Finally a PHIL simulation of a battery model is carried out and its applicability is shown.
I.
I NTRODUCTION
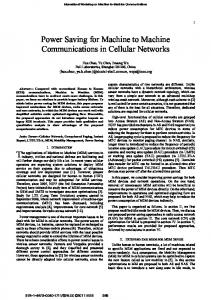
Battery energy storage systems (BESS) are one of, if not, the most emerging research topic in energy related research in recent years. They have induced high expectation to be a viable solution for pressing issues in the energy supply system as well as for electric mobility. At the current state of development and research it is to be expected that in the near future multiple new BESS will evolve. Therefore the development of battery inverters which can operate with different battery technologies is vital. The battery inverter is one of the most important factors when it comes to the overall efficiency of a battery system. This importance can be seen quite obviously in long time perspectives as well as in short time perspectives. It is quite a straightforward approach to test such important devices in order to improve their total efficiency. As a matter of fact the implementation of such an inverter test is very consuming in terms of resources as the battery has to be charged or discharged to the desired State of Charge (SoC) for each test. In order to achieve reasonable results for such an inverter test it is necessary to have the battery types that will be used in the inverter’s field of application available. Power Hardware-in-the-Loop (PHIL) Simulations present a significant improvement to the test of battery inverters as well as to power system testing. The basic idea of a PHIL simulation is to extend the applicability of a Hardware-in-theLoop simulation by introducing a power amplification into the simulation system. With the introduction of the power amplifier the signals exchanged between the Real Time System (RTS) and the Device under Test (DuT) are no longer in the range of data signals, but become real power signals (see Fig. 1). From a control point of view the introduction of a power amplification equals the implementation of an additional control loop. This additional control loop affects the stability behavior of the ����������������������������k�����,(((
����
simulation system in a negative way and may cause instabilities requiring additional efforts [1]. A PHIL simulation of a battery allows different technologies to be simulated at every desired state of the battery being set directly (SoC, temperature, State of Health ,. . . ). Time consuming charging and discharging of the battery system to a certain state of charge is no longer required, and the reproducibility of battery conditions is given at all times of testing. Also PHIL tests provide the possibility to run experiments which would destroy a real battery, like repeated deep discharges of a Li-ion battery. Another advantage is that different types of battery technologies and sizes need not to be available as hardware. This contribution first discusses battery models for real time systems and validates the chosen model with measurements of a Li-ion battery utilizing the FTP-72 driving cycle [3]. Then the experimental setup for a PHIL simulation of a battery described and finally the PHIL simulation is compared to a pure SW simulation demonstrating the future potential of real time capable battery models in combination with PHIL simulations for battery inverter tests. II.
BATTERY M ODEL
Battery modeling is always a tradeoff between accuracy, computation effort, calibration effort and analytical insights [4]. For the specific use case of battery inverter testing it is best if one has a battery model available that is as generic as possible. In the very best case model properties can be derived from the data sheet. If the required information is not provided Digital Simulation System
Interface with Power Amplifier
Device under Test (DuT) Simulated System
Signal
Power
RTS
Figure 1.
Fundamental principle of a PHIL implementation [1]
which can be argued to be a big advantage, as the reaction of the battery voltage reacts to a given current can be seen easily.
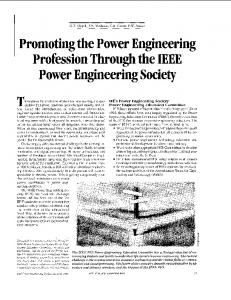
Figure 2.
EEC battery model
within the data sheet, only simple measurements should be used to determine the model properties. Analytical (chemical) insights on the internal processes of the battery (e.g. charge carrier density) are not required for this use case. The battery model is seen as a black box model whereas the device of main interest is the battery inverter. One of the biggest challenges to the battery model for the use case of PHIL simulation of battery inverters is the real time computation time step size. The smaller the time step of a real time simulation the higher the accuracy and stability of the PHIL experiment. The models further discussed in this contribution has a computation time that is low enough to allow a real time computation time step of 10 μs. A. Types of Real Time Battery Models For the use cases like battery inverter testing the battery model should describe the electrical behavior and not chemical insights like charge carrier density spread or the heating of the battery due to high discharge rates. Hence, the model output is the battery voltage as a function of State of Charge (SoC) and battery current. The SoC describes the available charge Qavailable of the battery at any given time. It is given in percent where 100% represents a fully charged battery and is defined as Qavailable SoC := Q
(1)
with the nominal capacity Q of the battery. The most straightforward way of calculating the SoC is Coulomb Counting [5]: � 1 t i(τ ) dτ (2) SoC(t) = SoCinit − Q 0 with SoCinit = SoC(t = 0) and positive i if the battery is discharged. Coulomb Counting disregards the Rate Capacityand Recovery Effect. The Kinetic Battery Model [6], [7] would regard them, but is not used in this contribution since it increases the computation time by approx. 50%. Other possible extensions could be adding self-discharge or charge/discharge efficiency or gassing current to equation 2. In a previous work [2] it has been shown, that for the real time computation of battery models equivalent electrical circuits models (EEC) and abstract mathematical models are viable. Other methods, as for example chemical models, have too high requirements to the computational afford for state of the art real time simulation systems. EEC models consist typically of a voltage source voc whose voltage is a function of the SoC, an internal resistor Ri and one or more RC-networks (see Fig. 2). EEC models are intuitive, ����
Other possible elements are inductors, diodes (for different behavior for charging and discharging) [8] or non-linear components [9]. These components on the one hand can help to improve the accuracy of the model but on the other hand will lessen the generic understanding of the model and increase the computation time. [10] and [11] concludes, that the effort to parameterize the values for a 2nd or 3rd RC network is not worth the small gain in accuracy in most cases. For the application at hand, which presents a strong requirement for low execution times, it is an obvious conclusion that only the first RC network is modeled. The work of [8], [11]– [13] shows that a higher impact on the accuracy, then given by additional RC elements, is caused by the fact that the resistances and capacitances are not constant, but depend on the SoC. Basically this introduction of R = f (SoC) and C = g(SoC) is a convergence of the EEC to abstract mathematical models. An abstract mathematical model contains of one or more equations, which can also be differential equations. Some of them are very simple, like the Universal Uniwehr model [14] v = E0 − R i − c SoC
(3)
with the parameters E0 , R and c. They are only valid within specific boundary conditions. Others contain a transient behavior like Zheng et. al [15], who deduced a model for the voltage response of a current pulse at time t0 : v = voc − R i + vp
(4)
with voc = c0 + c1 ln(SoC) + c2 ln(1 − SoC) + and
vp (t) = vp (t0 )e−
t−t0 τ2
c3 + c4 SoC (5) SoC
� t−t0 � + Rp i 1 − e− τ1 ,
(6)
where c0 . . . c4 , R, Rp , τ1 and τ2 are parameters to fit the model to a specific battery. A very common model is the Shepherd model [16]. The model was created for constant discharge of a battery with the following model equation: v = E0 − R i − K
it Q i + Ae−B Q Q − it
with the constant parameters E0 , R, K, A, B and � t i(τ ) dτ + itinit = Q (1 − SoC) it := 0
itinit = Q (1 − SoCinit ).
(7)
(8a) (8b)
Tremblay modified the model for charge and discharge and variable current (modified Shepherd model, MSM, [17], [18]). B. Extended Modified Shepherd Model Previous work [2] showed that a further extension of the MSM with an additional parameter increases the accuracy while it does not significantly increase the computational
and calibration effort. The model equation of the extended Modified Shepherd Model (eMSM) is written as: vbatt = −
E0 − R · i − Rpol · i∗ � � 1 K · Q SoC+SoC − 1 + Ae−B(1−SoC) . 0
(9)
The parameters E0 , R, K, A, B are the same as in (7), with it being replaced by SoC. SoC0 is the additional parameter introduced in [2] and the SoC is calculated according to (2). The term Rpol · i∗ is used to model the dynamic behavior of the battery and to add different charge and discharge behavior. The current i∗ is calculated by the simple differential equation τ and Rpol by Rpol =
�
di∗ + i∗ = i dt
1 K SoC ,
1 , K λ−SoC
i∗ > 0 else
(10)
(discharge)
(11)
λ = 1.1 was chosen as recommended by [18], resulting the therein discussed experiments. Comparing the eMSM with an EEC-model, the eMSM can be divided in an open circuit voltage � � 1 − 1 +Ae−B(1−SoC) , (12) voc = E0 −K ·Q SoC + SoC0 an internal resistor R, and one RC-network with R1 = Rpol and C1 = Rτpol . The time constant was chosen to be constant as it was done in [18]. Making it SoC- and current direction dependent could increase the accuracy but will increase the calibration effort. Thus, it is kept constant.
curve (or alternatively a constant discharge measurement with a sufficiently small battery current) the same parameters as in the “data sheet method” can be extracted. The discharge pulse is used to determine τ . This method has the advantage, that it is more exact than only using the data sheet, but it needs a real battery, measurement infrastructure and time consuming measurements. In this contribution the third approach was utilized, by using existing measurements of a Li-ion battery with a capacity Q = 20 Ah, a LiNiCoMnO2 cathode and a nominal cell voltage of 3.65 V. The battery was analyzed in [11] where the authors parameterized a look-up table model of the battery. First the current in (9) was set to zero and the M ATLAB Curve Fitting Toolbox was used to determine the parameters A, B, E0 , K and SoC0 from a open circuit voltage curve. The fitting has an R2 value of 0.9994, where 1 means a perfect fit and 0 fitting with the mean value. R and τ were parameterized using the mean values of the corresponding look-up table values for Ri and R1 · C1 . D. Offline Verification of the Battery Model For the verification of the battery model a weighted error is introduced. This is a relative error which is not related to the present reference value, but to the maximum value of all reference values. This weighted error was introduced as a traditional relative error could not be applied. If the reference value is zero, every present value unequal to zero will show an error of infinite amplitude. In order to cope with that, the weighted error as described herein was used: �x (ti ) :=
xact (ti ) − xref (ti ) max |xref (ti )|
ti = i · tstep
(13)
ti
C. Parameterization of the eMSM
�
with
There are multiple ways to parameterize the eMSM. One would be using the data sheet of a battery cell, which contains discharge profiles for the battery voltage at different discharge rates. A non-linear least square solver can be used to determine the parameters A, B, E0 , K, R and SoC0 out of this profiles. The parameters λ and τ have to be estimated, but λ = 1.1 has been proven to be accurate [18] and τ is similar for each specific battery technology and thus values of experience can be taken to achieve good results. The big advantage is, that no measurements are required and as a quite obvious result of this it is not necessary to buy a single battery of the type required for the test. Further this method is generic and can be automatized to a very high degree. The only disadvantage is its limited accuracy, but sufficient for battery inverter tests. Another way to parameterize the eMSM battery model would be using existing measurements, which can come from other applications like drive cycle tests, as long as they cover a wide area of the SoC. Then a multi-variable optimization is needed to determine the parameters. This takes a lot of effort and it is very difficult to know in advance if it is possible to extract an accurate parameterization out of the measurement data. A third possibility is making specific measurements with the intention to parameterize the eMSM. These measurements could be for example the combination of an open circuit voltage curve and a discharge pulse. With the open circuit voltage ����
i = 0, 1, . . .
duration time step tstep
(14)
and xref (ti ) as the reference value at the time ti and xact (ti ) the actual measured value. With this, a maximum weighted absolute error (15) �x,max := max |�x (ti )|, ti
a mean weighted absolute error
N
1 �
�x (ti )
�x,mean :=
N i=1 and a weighted root mean squared (RMS) error
N
1 � 2 � := (�x (ti )) �x,rms N i=1
(16)
(17)
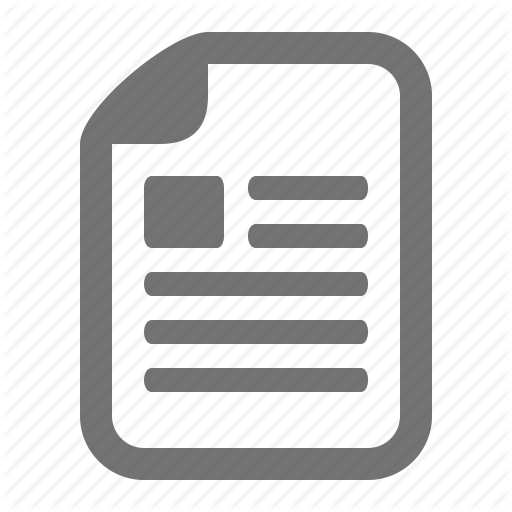
are introduced. For the verification a current on the basis of the FTP-72 test cycle [3] is applied repeatedly on a fully charged battery until it is empty. The model is implemented in M ATLAB /S IMULINK and the results are compared with the measurements of [11]. Fig 3 contains a detail of the FTP-72 cycle and shows a comparison of the comparison between the measurement and the simulation. The corresponding error can be seen in Table I. The model can handle the dynamic behavior of the battery but
Table I.
E RROR OF THE BATTERY VOLTAGE BETWEEN MEASUREMENT AND OFFLINE SIMULATION
overall 1 cycle, SoCinit = 0.95 1 cycle, SoCinit = 0.45 1 cycle, SoCinit = 0.08
�x,max
�x,mean
�x,rms
7.90% 2.29% 2.81% 7.90%
2.89% 1.58% 0.23% 2.89%
3.40% 1.63% 0.53% 3.40%
measurement
A. Real Time System
simulation
battery voltage [V]
3.75 3.7 3.65 3.6 3.55 3.5 300
Figure 3.
400
500
600 time [s]
700
800
900
Comparison of the measured and simulated battery voltage
underestimates the amount of it. Also the battery voltage is a bit too low when the SoC is close to 1 and too high when the battery is almost empty. Nevertheless, the mean- and RMSerror is beneath a few percent and therefore the eMSM is an applicable battery model. E. Scaling a Battery Model A battery consists of several cells in serial connection to increase the battery voltage, and several cells connected in parallel to increase the capacity. Thus, also a battery model must be able to be scaled to a desired voltage and capacity. For scaling a battery/cell with given voltage v and capacity Q to the desired values vdes and Qdes two factors are defined: vdes scalev := (18a) v Qdes . (18b) scaleQ := Q With this definition the parameters are scaled as follows: As
=
scalev
A
Bs
=
B
Ks
=
1 scaleQ scalev scaleQ
E0,s
=
scalev
E0
=
scalev scaleQ
R.
Rs
K
As Real Time Simulator the Opal-RT eMEGAsim system was used. It utilizes the RT-LAB software environment which is fully compatible with M ATLAB Simulink. This allows models to be implemented in Simulink and afterwards compiled for the RTS. The Opal-RT System in use provides each 32 analog inputs and outputs with a voltage range of ±16V . Thus, for this setup no further activities were needed to provide the analog signals for the bidirectional current source. The battery model was executed with a step time of 10 μs in order to increase the accuracy of the test case. The ode14x solver was chosen as a solver as it is faster than Simulink explicit fixed step solvers for stiff systems that require a very small step size to avoid instabilities as this is the case in target applications of the battery model.
B. Power Amplifier As mentioned previously, the power amplifier used for this contribution is a Regatron TC.GSS.32.600.400 bidirectional current. It consists of three rectifiers/inverters and a transformer to achieve up to 600 VDC output voltage and 66 A output current (maximum 32 kW) with an galvanic isolation between AC and DC side. Its step response for a set value change from 200 V to 300 V is shown in Fig. 5. The step response can be described with a PT2-term. Its corresponding transfer function is 1
G(s) = 1+
2γ ωsc
+
�
s ωc
�2
(20)
with γ = 0.95 and ωc = 2π111 Hz. C. Interface Algorithm
(19)
The parameters τ , λ and SoC0 are unchanged. III.
variable battery currents a constant load RL in combination with a programmable unidirectional current source was used. The Resistor R0 was implemented in order to limit the current in the case of the two sources acting against each other.
As interface algorithm, the Ideal Transformer Model (ITM) is used [19]. Fig. 6 illustrates the ITM. The voltage at the simulated current source is measured and put to the bidirectional current source (the battery simulator) which is used as the power amplification. In order to close the loop of the PHIL simulation the current out of the power amplification is measured and fed back into the simulation. The feedback branch an additional filtering is done in order to increase the stability behavior of the system.
D ESCRIPTION OF THE PHIL EXPERIMENTAL SETUP
Fig. 4 shows the total PHIL experimental setup. The battery emulator consists of a real time system (RTS) and a bidirectional current source Regatron TC.GSS.32.600.400 which can work in first and fourth quadrant. The set values for the bidirectional current source are provided by the real time simulator as analog voltage voltages. As there was no programmable load available, in order to be able to generate ����
Figure 4.
PHIL experimental setup
PT2−approximation
measured value 3
300
2
battery current [A]
voltage [V]
measurement 325
275 250 225 200 175 0
Figure 5.
set value
1 0 −1 −2
0.005
0.01
0.015
0.02
0.025 0.03 time [s]
0.035
0.04
0.045
0.05
Step response of the power amplifier
−3 300
Figure 7.
400
500
600 time [s]
700
800
900
Comparison between the reference and measured battery current
the FTP-72 cycle can be reproduced, a PHIL test of it can be performed. E. Implementation of the PHIL Experiment
Figure 6. Table II.
For the implementation of the PHIL use case it was decided to keep the battery voltage as small as possible and to limit the maximum current at every point of the test setup to imax = 16 A. This was done out of safety reasons. Observing these safety restrictions, the battery maximal current iB,max should be as high as possible.
Ideal Transformer Model E RROR BETWEEN REFERENCE AND MEASURED CURRENT
progr. DC-source
�x,max
�x,mean
�x,rms
46.59%
< 0.01%
2.39%
D. Programmable Load In order to be able to retrace the current curve of the reference current cycle a programmable load/source-combination was needed. Due to the fact that no programmable load was available a workaround had to be found. This workaround consisted out of a constant load (RL ) and a programmable current source (cf. Fig. 4). The required value for RL is defined by (25) in section III-E. With the measurement of the voltage vL and the knowledge of RL the current iS can be calculated in order to achieve a specific battery current iB . The control of the programmable current source is done using a LabVIEW program executed on an additional not real time capable PC. As a result of this, there is a delay between 30 and 80 ms between the reference value in LabVIEW and the current of the battery simulator. Since this possible delay is introduced to the hardware load and not the battery model directly it can be ruled out that the behaviour of the battery model is affected. Fig. 7 shows the set value according to the FTP-72 cycle and the resulting current of the battery simulator. The associated error can be seen in Table II with the error definitions of (15) to (17). The average- and RMS-errors are sufficiently small. A deeper analysis of the error shows, that the internal PID controller of the programmable current source produces an overshoot when the current gradient is too high in combination with the delay time. This leads to the unexpected high maximum error which occurs only in single samples of the simulation. Since it is ensured that the current set points of ����
With these specifications the two scale factors scalev and scaleQ can be determined. The minimal battery simulator voltage for working as a sink is vmin = 70 V. Thus the voltage must not fall below 70 V while feeding. This leads to a scale factor for the battery voltage: vmin scalev = (21) voc (SoCmin ) with SoCmin as the minimal SoC where the battery is considered as completely empty. As a result the maximal PHILbattery voltage can be calculated as: vmax = voc (SoCmax ) · scalev
(22)
with SoCmax as the maximal SoC where the battery is considered as fully charged. The highest current at the cables occurs at the programmable DC-source when the almost full battery is charged with iB,max : vmax + RS iB,max = imax . (23) RL Discharging the almost empty battery with iB,max gives the equation vmin = iB,max · (RS + RL ). (24) iS,max = −iB,max +
Now the value of the load resistor RL and the maximal battery simulator current iB,max can be calculated vmin + vmax RL = (25) imax vmin iB,max = . (26) RS + RL Finally the scaling factor for the current can be calculated: scaleQ =
iB,max , imeas,max
(27)
PHIL simulation
R EFERENCES
pure SW simulation
116
[1]
voltage [V]
114 112
[2]
110 108
[3] 106 300
Figure 8.
400
500
600 time [s]
700
800
900
[4]
Comparison between PHIL simulation and pure SW simulation [5]
Table III.
E RROR OF THE BATTERY VOLTAGE BETWEEN PHIL AND PURE SW SIMULATION �x,max
�x,mean
�x,rms
1.78%
< 0.01%
0.16%
PHIL Simulation
[6] [7]
where imeas,max is the maximum current occurring in the original measurements of the source. Applying these boundary conditions to a 20 Ah-cell with a nominal voltage of 3.65 V leads to a scalev = 32 and scaleQ = 0.05. IV.
R ESULTS
[9]
The results of the PHIL experiment utilizing the FTP-72 cycle with the given experimental setup are shown in Fig. 8 with the corresponding error in Table III. The behavior of the PHIL experiment shows very good results with an maximum error of 1.78% and an RMS error of 0.16%. The impact of the measurement noise is sufficiently small and will increase with higher current or lower battery voltage. A direct comparison of the PHIL experiment and the pure hardware experiment can not be done due to the lack of a programmable load that can be controlled in real time. Nevertheless, this two comparisons (Fig. 3 and 8) showed that the PHIL implementation is highly accurate and thus validated. V.
[8]
[10]
[11]
[12]
[13]
[14]
C ONCLUSION
This contribution shows that combination of a real time capable battery model and the used power amplifier is a valuable experimental setup for testing battery inverters in a PHIL simulation. The benefits of such a setup are very obvious since it is not necessary to buy real batteries, the tests are reproducible as well as time consuming charging and discharging procedures after the experiments can be skipped.
[15]
[16]
[17]
The accuracy of such a test setup was evaluated utilizing the FTP-72 driving cycle, with the result that a reasonable high accuracy can be achieved with and maximum error below 2%.
[18]
ACKNOWLEDGMENTS
[19]
This work was funded by the Austrian Climate and Energy fund with the support of the Austrian Research Promotion Agency (FFG) under the project VIsion Step I as well as DGEV-HIL. ����
A. Viehweider, G. Lauss, and L. Felix, “Stabilization of power hardware-in-the-loop simulations of electric energy systems,” Simulation Modelling Practice and Theory, vol. 19, no. 7, pp. 1699–1708, Aug. 2011. C. Seitl, J. Kathan, G. Lauss, and F. Lehfuß, “Selection and implementation of a generic battery model for phil applications,” in IECON 2013 - 39th Annual Conference on IEEE Industrial Electronics Society, Nov. 2013, pp. 5410–5415. “Emission test cycles: FTP-72 (UDDS).” [Online]. Available: http: //www.dieselnet.com/standards/cycles/ftp72.php R. Rao, S. Vrudhula, and D. Rakhmatov, “Battery modeling for energy aware system design,” Computer, vol. 36, no. 12, pp. 77 – 87, Dec. 2003. M. Coleman, C. K. Lee, C. Zhu, and W. Hurley, “State-of-charge determination from EMF voltage estimation: Using impedance, terminal voltage, and current for lead-acid and lithium-ion batteries,” IEEE Transactions on Industrial Electronics, vol. 54, no. 5, pp. 2550 –2557, Oct. 2007. M. Jongerden and B. Haverkort, “Which battery model to use?” IET Software, vol. 3, no. 6, pp. 445 –457, Dec. 2009. L. Tao, L. Mo, S. Liu, and R. Gao, “Optimal battery charge and discharge control scheme under solar power inflow,” in Instrumentation and Measurement Technology Conference (I2MTC), 2012 IEEE International, May 2012, pp. 849 –854. K. Thirugnanam, H. Saini, and P. Kumar, “Mathematical modeling of li-ion battery for charge/discharge rate and capacity fading characteristics using genetic algorithm approach,” in 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Jun. 2012, pp. 1 –6. L. Juang, P. Kollmeyer, T. Jahns, and R. Lorenz, “Improved nonlinear model for electrode voltage-current relationship for more consistent online battery system identification,” in 2011 IEEE Energy Conversion Congress and Exposition (ECCE), Sep. 2011, pp. 2628 –2634. X. Hu, S. Li, and H. Peng, “A comparative study of equivalent circuit models for li-ion batteries,” Journal of Power Sources, vol. 198, pp. 359–367, Jan. 2012. M. Einhorn, F. Conte, C. Kral, and J. Fleig, “Comparison, selection, and parameterization of electrical battery models for automotive applications,” IEEE Transactions on Power Electronics, vol. 28, no. 3, pp. 1429 –1437, Mar. 2013. L. Lam, P. Bauer, and E. Kelder, “A practical circuit-based model for liion battery cells in electric vehicle applications,” in Telecommunications Energy Conference (INTLEC), 2011 IEEE 33rd International, Oct. 2011, pp. 1 –9. M. Chen and G. Rincon-Mora, “Accurate electrical battery model capable of predicting runtime and i-v performance,” IEEE Transactions on Energy Conversion, vol. 21, no. 2, pp. 504 – 511, Jun. 2006. A. A.-H. Hussein and I. Batarseh, “An overview of generic battery models,” Detroit, Michigan, Jul. 2011. M. Zheng, B. Qi, and X. Du, “Dynamic model for characteristics of li-ion battery on electric vehicle,” in 4th IEEE Conference on Industrial Electronics and Applications, 2009. ICIEA 2009, May 2009, pp. 2867 –2871. C. M. Shepherd, “Design of primary and secondary cells II . an equation describing battery discharge,” Journal of The Electrochemical Society, vol. 112, no. 7, pp. 657–664, Jul. 1965. O. Tremblay, L.-A. Dessaint, and A.-I. Dekkiche, “A generic battery model for the dynamic simulation of hybrid electric vehicles,” in IEEE Vehicle Power and Propulsion Conference, 2007. VPPC 2007, Sep. 2007, pp. 284 –289. O. Tremblay and Dessiaint, “Experimental validation of a battery dynamic model for EV applications,” World Electric Vehicle Journal, 2009. A. Viehweider, F. Lehfuss, and G. Lauss, “Interface and stability issues for siso and mimo power hardware in the loop simulation of distribution networks with photovoltaic generation,” International Journal of Renewable Energy Research (IJRER), vol. 2, no. 4, pp. 631– 639, 2012.