Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 840517, 9 pages http://dx.doi.org/10.1155/2014/840517
Research Article Adaptive Fuzzy Containment Control for Uncertain Nonlinear Multiagent Systems Yang Yu1,2 and Kang-Hyun Jo2 1 2
School of Electrical Engineering, Liaoning University of Technology, Jinzhou 121001, China School of Electrical Engineering, University of Ulsan, Ulsan 680749, Republic of Korea
Correspondence should be addressed to Kang-Hyun Jo;
[email protected] Received 12 April 2014; Revised 1 September 2014; Accepted 8 September 2014; Published 16 October 2014 Academic Editor: Xing-Gang Yan Copyright © 2014 Y. Yu and K.-H. Jo. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. This paper considers the containment control problem for uncertain nonlinear multiagent systems under directed graphs. The followers are governed by nonlinear systems with unknown dynamics while the multiple leaders are neighbors of a subset of the followers. Fuzzy logic systems (FLSs) are used to identify the unknown dynamics and a distributed state feedback containment control protocol is proposed. This result is extended to the output feedback case, where observers are designed to estimate the unmeasurable states. Then, an output feedback containment control scheme is presented. The developed state feedback and output feedback containment controllers guarantee that the states of all followers converge to the convex hull spanned by the dynamic leaders. Based on Lyapunov stability theory, it is proved that the containment control errors are uniformly ultimately bounded (UUB). An example is provided to show the effectiveness of the proposed control method.
1. Introduction Since the scales of practice control system became larger and larger, much attention has been paid to complex systems, such as interconnected systems and multiagent systems. An interconnected system means a system that consists of interacting subsystems. The main control objective of interconnected systems is to find some decentralized feedback laws for adapting the interconnections from the other subsystems, where no state information is transferred [1–4]. Multiagent systems consist of some intelligent agents, which have the capability of reacting to the variety of environments automatically, such as robots, automatic vehicles, and sensors. The main control objective of multiagent systems is to establish distributed control laws based on the information of the agent and its neighbors to realize collective behavior [5–8]. In the past decades, cooperative control problem of multiagent systems has attracted significant research interests, which mainly focuses on consensus [9–14], formation control [15, 16], and containment control [17]. Containment control aims at guiding the states or outputs of the followers to converge to a convex hull formed by the multiple leaders using a distributed control protocol.
The problem has many applications, for example, securing a group of followers in the area spanned by the leaders so that they can be away from dangerous sources outside the area. Recently, distributed containment control problem has been investigated and numerous research results have been obtained [18–27]. Containment control strategies were proposed for multiagent systems with single-integrator [17– 19], double-integrator [20–22], or general linear dynamics [23]. However, the reported methods can only deal with the containment control problem of linear multiagent systems. By now, there have been some results on containment control for nonlinear multiagent systems in [24–27]. It should be noted that the proposed containment controllers required each agent satisfying Lagrangian dynamics with known nonlinearities [24, 25], linearly parameterized nonlinearities [26], or unknown nonlinearities [27]. Therefore, containment control problem for uncertain nonlinear multiagent systems needs to be further investigated. Motivated by the above observations, in this paper, containment control problem for multiagent systems with more general nonlinear dynamics is studied. The nonlinear dynamics of each follower can be totally unknown. Using FLSs to identify the unknown nonlinear dynamics, distributed state
2
Mathematical Problems in Engineering
feedback and output feedback containment control schemes are proposed to drive the states of all followers into the convex hull spanned by the leaders. It is proved that the containment control errors converge to a residual set. The rest of the paper is organized as follows. Section 2 formulates problem formulation. Section 3 provides the design of distributed state feedback containment controllers. Section 4 provides the design of distributed state feedback containment controllers. Section 5 gives an illustrative example to show the effectiveness of the proposed approaches. Section 6 concludes the paper. Compared with the existing results on nonlinear multiagent systems, the main advantages of the proposed containment control scheme in this paper are listed as follows. (1) In [14], the consensus scheme was proposed for general nonlinear multiagent systems, which drive all followers to track the states of the leader. In this paper, we develop a containment control method for the nonlinear multiagent systems to drive all followers to converge to a convex hull formed by the multiple leaders. It should be noted that consensus and containment control are two different problems in the cooperative control of multiagent systems. (2) In [17–23], containment control methods were proposed for single-integrator, double-integrator, or general linear multiagent systems. From a piratical perspective, we consider the containment control problem for nonlinear multiagent systems in this paper. (3) In [24–27], containment control scheme was developed for nonlinear multiagent systems with Lagrangian dynamics, where the nonlinearities were assumed to be known, linearly parameterized, or unknown. In this paper, we design a state feedback containment control scheme for more general nonlinear multiagent systems with unknown dynamics. Besides, considering that some states in the systems are unmeasurable in practice, an output feedback containment control scheme is proposed. Notations. Throughout this paper, 𝑅+ is a set of positive real numbers. 𝑅𝑛×𝑚 is a set of 𝑛 × 𝑚 real matrices. 𝐼𝑁 is an identity matrix with the dimension of 𝑁. ‖ ⋅ ‖ is the Euclidean norm of a vector. ‖ ⋅ ‖𝐹 is the Frobenius norm of a matrix. tr(⋅) is the trace of a matrix. 𝜎(⋅) and 𝜎(⋅) are the maximum and minimum singular values of a matrix, respectively. diag(𝜆 𝑖 ) is a diagonal matrix with 𝜆 𝑖 being the 𝑖th diagonal element. ⊗ is the Kronecker product.
2. Problem Formulation Consider a class of nonlinear multiagent systems consisting of 𝑁 followers and 𝑀 leaders. The dynamics of follower 𝑖 are described by 𝑥𝑖̇ = 𝐴𝑥𝑖 + 𝐵 [𝑢𝑖 + 𝑓𝑖 (𝑥𝑖 )] , 𝑦𝑖 = 𝐶𝑥𝑖 ,
𝑖 = 1, . . . , 𝑁,
(1)
where 𝑥𝑖 = [𝑥𝑖1 , . . . , 𝑥𝑖𝑛 ]𝑇 ∈ 𝑅𝑛 , 𝑢𝑖 = [𝑢𝑖1 , . . . , 𝑢𝑖𝑚 ]𝑇 ∈ 𝑅𝑚 , and 𝑦𝑖 ∈ 𝑅𝑝 are the state vectors, inputs, and outputs of the systems. 𝑓𝑖 (𝑥𝑖 ) = [𝑓𝑖1 (𝑥𝑖 ), . . . , 𝑓𝑖𝑚 (𝑥𝑖 )]𝑇 ∈ 𝑅𝑚 are unknown nonlinear functions. 𝐴 ∈ 𝑅𝑛×𝑛 , 𝐵 ∈ 𝑅𝑛×𝑚 , and 𝐶 ∈ 𝑅𝑝×𝑛 are known matrices. The dynamics of leader 𝑘 are given by 𝑥𝑘̇ = 𝐴𝑥𝑘 + 𝐵𝑟𝑘 (𝑡) ,
𝑘 = 𝑁 + 1, . . . , 𝑁 + 𝑀,
(2)
where 𝑥𝑘 = [𝑥𝑘1 , . . . , 𝑥𝑘𝑛 ]𝑇 ∈ 𝑅𝑛 are the state vectors. 𝑟𝑘 (𝑡) ∈ 𝑅𝑚 are unknown bounded inputs. The information flow among the agents can be described by a directed graph 𝐺 = (], 𝜀, Λ) which consists of a vertex set ] = {𝑛1 , . . . , 𝑛𝑁+𝑀}, an edge set 𝜀 = {(𝑛𝑖 , 𝑛𝑗 ) ∈ ] × ]}, and an adjacency matrix Λ = [𝑎𝑖𝑗 ] ∈ 𝑅(𝑁+𝑀)×(𝑁+𝑀) . 𝑛𝑖 represents agent node 𝑖. (𝑛𝑖 , 𝑛𝑗 ) ∈ 𝜀 means that there is a directed information flow from agent 𝑖 to agent 𝑗. The neighbor set of node 𝑖 is denoted by 𝑁𝑖 = {𝑗 | (𝑛𝑖 , 𝑛𝑗 ) ∈ 𝜀}. Each element 𝑎𝑖𝑗 of Λ is defined as 𝑎𝑖𝑗 > 0, if (𝑛𝑖 , 𝑛𝑗 ) ∈ 𝜀, and 𝑎𝑖𝑗 = 0, if (𝑛𝑖 , 𝑛𝑗 ) ∉ 𝜀. Throughout this paper, it is assumed that 𝑎𝑖𝑖 = 0. If 𝑎𝑖𝑗 = 𝑎𝑗𝑖 , for all 𝑖, 𝑗, the graph 𝐺 is undirected; otherwise the graph 𝐺 is directed. A directed graph has a spanning tree if there is a root node, such that there is a directed path from the root node to every other node in the graph. The Laplacian matrix 𝐿 = [𝐿 𝑖𝑗 ] ∈ 𝑅(𝑁+𝑀)×(𝑁+𝑀) is defined as −𝑎𝑖𝑗 , { { { 𝐿 𝑖𝑗 = { { { ∑ 𝑎𝑖𝑗 , {𝑗∈𝑁𝑖
𝑖 ≠ 𝑗, 𝑖 = 𝑗.
(3)
Then, the Laplacian matrix 𝐿 = 𝐷 − Λ, where 𝐷 = diag(𝑑𝑖 ) is the degree matrix with 𝑑𝑖 = ∑𝑁 𝑗=1 𝑎𝑖𝑗 (𝑖 = 1, . . . , 𝑁). An agent is called a follower if the agent has at least one neighbor. An agent is called a leader if the agent has no neighbor. Without loss of generality, we assume that the agents indexed by 1, . . . , 𝑁 are followers, whereas the agents indexed by 𝑁 + 1, . . . , 𝑁 + 𝑀 are leaders. Then, the Laplacian matrix 𝐿 can be partitioned as 𝐿=[
𝐿2 𝐿1 ], 0𝑀×𝑁 0𝑀×𝑀
(4)
where 𝐿 1 ∈ 𝑅𝑁×𝑁 and 𝐿 2 ∈ 𝑅𝑁×𝑀. Assumption 1. For each follower, there exists at least one leader that has a directed path to that follower. Lemma 2 (see [24]). Under Assumption 1, all the eigenvalues of 𝐿 1 have positive real parts, each entry of −𝐿−1 1 𝐿 2 is non𝐿 has a sum equal to 1. negative, and each row of −𝐿−1 1 2 Definition 3. The set Ξ ⊆ 𝑅𝑛 is said to be convex if, for any 𝑥1 , 𝑥2 ∈ Ξ and any 𝛼 ∈ [0, 1], the point 𝛼𝑥1 + (1 − 𝛼)𝑥2 is in Ξ. The convex hull Co(𝑋) for a set of points 𝑋 = {𝑥1 , . . . , 𝑥𝑛 } is the minimal convex set containing all points in 𝑋 and is defined as Co(𝑋) = {∑𝑛𝑖=1 𝛼𝑖 𝑥𝑖 | 𝑥𝑖 ∈ 𝑋, 𝛼𝑖 > 0, ∑𝑛𝑖=1 𝛼𝑖 = 1}. The control objective is to design containment controllers 𝑢𝑖 , such that the states of all followers converge to the convex
Mathematical Problems in Engineering
3
hull formed by the leaders 𝑟𝑙 (𝑡), that is, infℎ(𝑡)∈𝑅(𝑡) ‖𝑥𝑖 − ℎ(𝑡)‖ < 𝜖, for all 𝜖 > 0, where 𝑖 = 1, . . . , 𝑁, 𝑅(𝑡) = Co{𝑥𝑁+1 (𝑡), . . . , 𝑥𝑁+𝑀(𝑡)}. Let 𝑥𝐿 = [𝑥𝑁+1 (𝑡), . . . , 𝑥𝑁+𝑀(𝑡)]𝑇 and 𝑥𝑑𝐿 = [𝑥𝑑1 (𝑡), . . . , 𝑥𝑑𝑁(𝑡)]𝑇 = −𝐿−1 1 𝐿 2 𝑥𝐿 . From Lemma 2, we can obtain infℎ(𝑡)∈𝑅(𝑡) ‖𝑥𝑑𝑖 − ℎ(𝑡)‖ < 𝜖 with 𝑖 = 1, . . . , 𝑁. Therefore, the control objective can be transformed as infℎ(𝑡)∈𝑅(𝑡) 𝑥𝑖 − 𝑥𝑑𝑖 < 𝜖, ∀𝜖 > 0, (5) where 𝑖 = 1, . . . , 𝑁. The containment control errors are defined as 𝜉𝑖 = 𝑥𝑖 − 𝑥𝑑𝑖 , 𝑖 = 1, . . . , 𝑁. In this paper, we adopt the singleton fuzzifier, product inference, and the center-defuzzifier to deduce the following fuzzy rules [28–30]. 𝑅𝑖 : IF 𝑥1 is 𝐹𝑖1 , and . . . and 𝑥𝑛 is 𝐹𝑖𝑛 , THEN 𝑦 is 𝐵𝑖 (𝑖 = 1, . . . , 𝑟), where 𝑥 = [𝑥1 , . . . , 𝑥𝑛 ] ∈ 𝑅𝑛 and 𝑦 ∈ 𝑅 are the 𝑗 input and output of the fuzzy system, respectively. 𝐹𝑖 (𝑗 = 𝑖 1, . . . , 𝑛) and 𝐵 are fuzzy sets in 𝑅. The fuzzy inference engine performs a mapping from fuzzy sets in 𝑅𝑛 to a fuzzy set in 𝑅 based on the IF-THEN rules in the fuzzy rule base and the compositional rule of inference. The fuzzifier maps a crisp point x into a fuzzy set 𝐴 𝑥 in 𝑅. The defuzzifier maps a fuzzy set in R to a crisp point in R. Since the strategy of singleton fuzzification, center-average defuzzification, and product inference is used, the output of the fuzzy system can be formulated as 𝑦 (𝑥) =
𝑟 ∑𝑁 𝑗=1 𝜃𝑗 ∏𝑖=1 𝜇𝐹𝑖𝑗
∑𝑁 𝑗=1
∏𝑟𝑖=1 𝜇𝐹𝑗 𝑖
(𝑥𝑖 )
(𝑥𝑖 )
,
𝑖
𝜑(𝑥) = [𝜑1 (𝑥), . . . , 𝜑𝑛 (𝑥)]𝑇 , and 𝜃 = [𝜃1 , . . . , 𝜃𝑛 ]𝑇 . Then the fuzzy logic system (6) can be rewritten as 𝑦 (𝑥) = 𝜃𝑇 𝜑 (𝑥) .
3.1. State Feedback Containment Controller Design. Distributed containment controllers are proposed as 𝑢𝑖 = 𝑢𝑖1 − 𝑢𝑖2 ,
(7)
𝑖 = 1, . . . , 𝑁,
(11)
where 𝑢𝑖1 and 𝑢𝑖2 are designed as follows: 𝑁
𝑁+𝑀
𝑢𝑖1 = 𝑐𝐾 [∑ 𝑎𝑖𝑗 (𝑥𝑖 − 𝑥𝑗 ) + ∑ 𝑎𝑖𝑗 (𝑥𝑖 − 𝑥𝑗 )] , 𝑗=𝑁+1 [𝑗=1 ]
(12)
where 𝑐 ∈ 𝑅+ is a coupling gain. 𝐾 ∈ 𝑅𝑚×𝑛 is a controller gain with 𝐾 = −𝐵𝑇 𝑃1 , and 𝑃1 is positive definite satisfying the following Riccati inequality: 𝐴𝑇 𝑃1 + 𝑃1 𝐴 − 𝑃1 𝐵𝐵𝑇 𝑃1 + 𝑄1 ≤ 0,
(13)
where 𝑄1 is positive definite. By Lemma 4, the multipleinput multiple-output unknown dynamics 𝑓𝑖 (𝑥𝑖 ) can be approximated by FLSs as [24, 25] 𝑓𝑖 (𝑥𝑖 ) = 𝜃𝑖∗𝑇 𝜑 (𝑥𝑖 ) + 𝜀𝑖 .
(14)
Then, 𝑢𝑖2 are designed as 𝑢𝑖2 = 𝜃𝑖𝑇 𝜑 (𝑥𝑖 ) ,
(6)
where 𝜃𝑗 is the point at which fuzzy membership function 𝜇𝐵𝑗 (𝜃𝑗 ) achieves its maximum value. It is assumed that 𝑟 ∑N𝑗=1 𝜇𝐵𝑗 (𝜃𝑗 ) = 1. Let 𝜑𝑗 = (∏𝑟𝑖=1 𝜇𝐹𝑗 (𝑥𝑖 ))/(∑𝑁 𝑗=1 ∏𝑖=1 𝜇𝐹𝑗 (𝑥𝑖 )), 𝑖
3. The Design of Distributed State Feedback Containment Controllers
(15)
where 𝜃𝑖 are the estimations of 𝜃𝑖∗ . 𝑇 𝑇 𝑇 𝑇 ] , 𝑥𝐿 = [𝑥𝑁+1 , . . . , 𝑥𝑁+𝑀 ]𝑇 . Then, Let 𝑥𝐹 = [𝑥1𝑇 , . . . , 𝑥𝑁 one has 𝑥𝐹̇ = (𝐼𝑁 ⊗ 𝐴 + 𝑐𝐿 1 ⊗ 𝐵𝐾) 𝑥𝐹 + 𝑐 (𝐿 2 ⊗ 𝐵𝐾) 𝑥𝐿 + (𝐼𝑁 ⊗ 𝐵) 𝜃̃𝑇 𝜑 (𝑥) + (𝐼𝑁 ⊗ 𝐵) 𝜀, 𝑥𝐿̇ = (𝐼𝑀 ⊗ 𝐴) 𝑥𝐿 + (𝐼𝑀 ⊗ 𝐵) 𝑟,
(16)
It has been proved in [31] that if Gaussian functions are used as membership functions, the following lemma holds. Lemma 4. Let 𝑓(𝑥) be a continuous function defined on a compact set Ω. Then, for any constant 𝜀 > 0, there exists an FLS such as sup 𝑓 (𝑥) − 𝜃𝑇 𝜑 (𝑥) ≤ 𝜀, (8) 𝑥∈Ω
where 𝜃̃ = diag(𝜃𝑖∗ − 𝜃𝑖 ), 𝜑(𝑥) = [𝜑𝑇 (𝑥1 ), . . . , 𝜑𝑇 (𝑥𝑁)]𝑇 , 𝜀 = 𝑇 𝑇 𝑇 𝑇 ] , 𝑟 = [𝑟𝑁+1 (𝑡), . . . , 𝑟𝑁+𝑀 (𝑡)]𝑇 . [𝜀1𝑇 , . . . , 𝜀𝑁 𝑁 𝑁+𝑀 Let 𝑒𝑖 = ∑𝑗=1 𝑎𝑖𝑗 (𝑥𝑖 − 𝑥𝑗 ) + ∑𝑗=𝑁+1 𝑎𝑖𝑗 (𝑥𝑖 − 𝑥𝑗 ) and 𝑒 = 𝑇 𝑇 [𝑒1𝑇 , . . . , 𝑒𝑁 ] . Then
where Ω is a compact region for 𝑥. 𝜃 = [𝜃1 , . . . , 𝜃𝑚 ]𝑇 is an adjustable vector. 𝜑(𝑥) = [𝜑1 (𝑥), . . . , 𝜑𝑚 (𝑥)]𝑇 is a fuzzy basis function vector. Optimal parameter vector 𝜃∗ is defined as 𝜃∗ = arg min [sup 𝑓̂ (𝑥 | 𝜃) − 𝑓 (𝑥)] , (9)
𝑒 = (𝐿 1 ⊗ 𝐼𝑛 ) 𝑥𝐹 + (𝐿 2 ⊗ 𝐼𝑛 ) 𝑥𝐿 .
𝜃∈U𝜃
𝑓 (𝑥) = 𝜃∗𝑇 𝜑 (𝑥) + 𝜀,
Substituting (16) into the derivative of (17), we have 𝑒 ̇ = (𝐼𝑁 ⊗ 𝐴 + 𝑐𝐿 1 ⊗ 𝐵𝐾) 𝑒 + (𝐼𝑁 ⊗ 𝐵) 𝜃̃𝑇 𝜑 (𝑥) + (𝐿 1 ⊗ 𝐵) 𝜀 + (𝐿 2 ⊗ 𝐵) 𝑟.
where 𝑈𝜃 is the compact set of 𝜃. Then (10)
where 𝜀 is the minimum fuzzy approximation error with an unknown bound.
(17)
(18)
3.2. Stability Analysis Theorem 5. Consider the multiagent systems given by (1), (2). Under Assumption 1, the communication graph is directed and
4
Mathematical Problems in Engineering
has a spanning tree. Select the containment controllers (11), (12), and (15) with the coupling gain 𝑐 satisfying 𝑐≥
1 2 min𝑖=1,...,𝑁 (𝜆 𝑖 )
,
(19)
By Lemma 4, 𝜃𝑖∗ , 𝜖𝑖 are bounded and use the fact that 𝑟𝑘 (𝑡) are bounded. Then, there exist positive constants 𝜃𝑀, 𝜀𝑀, and 𝑟𝑀, such that ‖𝜃∗ ‖𝐹 ≤ 𝜃𝑀, ‖𝜀‖ ≤ 𝜀𝑀, and ‖𝑟‖ ≤ 𝑟𝑀. It follows from (26) that 1 2 ) 𝜎 (𝑄1 ) ‖𝑒‖2 − 𝜎𝜃̃𝐹 𝑉1̇ ≤ − min (𝜆−1 2 𝑖=1,...,𝑁 𝑖
where 𝜆 𝑖 are the eigenvalues of 𝐿 1 . 𝜃𝑖 are updated by 𝜃𝑖̇ = 𝑇𝜃𝑖 [𝜑 (𝑥) 𝑒𝑖𝑇 𝑃1 𝐵 − 𝜎𝜃𝑖 ] ,
where 𝑇𝜃𝑖 > 0, 𝜎 > 0. Then, all the signals in the closedloop multiagent systems are UUB, and the containment control errors satisfy lim 𝜉 ≤ 1 ,
𝑡→∞
+ ‖𝑒‖ 𝜎 (𝑃1 𝐵) [𝜀𝑀 + 𝜎 (𝐿−1 1 𝐿 2 ) 𝑟𝑀 ]
(20)
+ 𝜎𝜃̃𝐹 𝜃𝑀. Rewrite (27) in the following matrix form: 𝑉1̇ ≤ −𝑧1𝑇 Σ1 𝑧1 + ℎ1 𝑧1 ,
(21)
𝑇 𝑇 where 𝜉 = [𝜉1𝑇 , . . . , 𝜉𝑁 ] , 1 ∈ 𝑅+ .
1 1 ̃ , 𝑉1 = 𝑒𝑇 (𝐿−1 tr (𝜃̃𝑇 𝑇𝜃−1 𝜃) 1 ⊗ 𝑃1 ) 𝑒 + 2 2
𝑇 𝑧1 = [‖𝑒‖ 𝜃̃𝐹 ] , ℎ1 = [𝜎 (𝑃1 𝐵) [𝜀𝑀 + 𝜎 (𝐿−1 1 𝐿 2 ) 𝑟𝑀 ] 𝜎𝜃𝑀 ] ,
(22)
1 − min (𝜆−1 ) 𝜎 (𝑄1 ) 0 ] [ Σ1 = . 2 𝑖=1,...,𝑁 𝑖 0 𝜎] [
where 𝑇𝜃 = diag(𝑇𝜃𝑖 ). Substituting 𝐾 = −𝐵𝑇 𝑃1 and (18) into the derivative of (22), we have 1 𝑇 𝑇 𝑉1̇ = 𝑒𝑇 [𝐿−1 1 ⊗ (𝑃1 𝐴 + 𝐴 𝑃1 ) − 2𝑐𝐼𝑁 ⊗ 𝑃1 𝐵𝐵 𝑃1 ] 𝑒 2 +𝑒𝑇 [(𝐼𝑁 ⊗ 𝑃1 𝐵) 𝜀 + (𝐿−1 1 𝐿 2 ⊗ 𝑃1 𝐵) 𝑟] ̃𝑇
+ 𝑒 (𝐼𝑁 ⊗ 𝑃1 𝐵) 𝜃 𝜑 (𝑥) −
(28)
where
Proof. Consider the Lyapunov function candidate
𝑇
(27)
Noting the fact that 𝜎(𝑄1 ) > 0 and 𝜎 > 0, it follows that Σ1 is positive definite. Then (23)
tr (𝜃̃𝑇 Γ𝜃−1 𝜃)̇ .
2 𝑉1̇ ≤ −𝜎 (Σ1 ) 𝑧1 + ℎ1 𝑧1 . −1 𝑅1 = min [𝜎 (𝐿−1 1 ) 𝜎 (𝑃1 ) , 𝑇𝜃𝑖 ] ,
1 𝑇 𝑇 𝑉1̇ = 𝑒𝑇 [𝐿−1 1 ⊗ (𝑃1 𝐴 + 𝐴 𝑃1 ) − 2𝑐𝐼𝑁 ⊗ 𝑃1 𝐵𝐵 𝑃1 ] 𝑒 2
−1 𝑅1 = max [𝜎 (𝐿−1 1 ) 𝜎 (𝑃1 ) , 𝑇𝜃𝑖 ] .
(24)
By Assumption 1 and Lemma 2, all the eigenvalues of 𝐿 1 have positive real parts. Thus, there exists a unitary matrix 𝑈 ∈ −1 𝑅𝑁×𝑁 such that 𝑈𝑇𝐿−1 1 𝑈 = diag(𝜆 𝑖 ), 𝑖 = 1, . . . , 𝑁. Let 𝑒 = 𝑇 𝑇 𝑇 (𝑈 ⊗ 𝐼𝑛 )𝜍, where 𝜍 = [𝜍1 , . . . , 𝜍𝑁] . Then, it follows from (24) that
𝑉1̇ ≤ 𝛼𝑉1 + 𝛽√𝑉1 ,
+ 𝜎 tr (𝜃̃𝑇 𝜃) . Substituting (13) and (19) into (25), one has 1 𝑉1̇ ≤ − min (𝜆−1 ) 𝜎 (𝑄1 ) ‖𝑒‖2 2 𝑖=1,...,𝑁 𝑖 ̃𝑇 + 𝑒𝑇 [(𝐼𝑁 ⊗ 𝑃1 𝐵) 𝜀 + (𝐿−1 1 𝐿 2 ⊗ 𝑃1 𝐵) 𝑟] + 𝜎 tr (𝜃 𝜃) . (26)
(33)
where 𝛼 = 2𝜎(Σ1 )/𝑅1 , 𝛽 = (√2‖ℎ1 ‖)/√𝑅1 . Then √𝑉1 (𝑡) ≤ √𝑉1 (0)𝑒−(𝛼/2)𝑡 +
(25)
(32)
From (30) and (32), we have
𝑁
1 𝜍𝑇 (𝑃 𝐴 + 𝐴𝑇 𝑃1 − 2𝑐𝜆 𝑖 𝑃1 𝐵𝐵𝑇 𝑃1 ) 𝜍𝑖 𝑉1̇ = ∑𝜆−1 2 𝑖=1 𝑖 𝑖 1
(31)
Then 1 2 1 2 𝑅1 𝑧1 ≤ 𝑉1 ≤ 𝑅1 𝑧1 . 2 2
+ 𝜎 tr (𝜃̃𝑇 𝜃) .
+ 𝑒𝑇 [(𝐼𝑁 ⊗ 𝑃1 𝐵) 𝜀 + (𝐿−1 1 𝐿 2 ⊗ 𝑃1 𝐵) 𝑟]
(30)
Let
It follows from (20) that
+ 𝑒𝑇 [(𝐼𝑁 ⊗ 𝑃1 𝐵) 𝜀 + (𝐿−1 1 𝐿 2 ⊗ 𝑃1 𝐵) 𝑟]
(29)
𝛽 (1 − 𝑒−(𝛼/2)𝑡 ) . 𝛼
(34)
Since lim𝑡 → ∞ √𝑉1 (𝑡) = 𝛽/𝛼, we obtain that all signals in the closed-loop multiagent systems are UUB. Then ‖𝑒‖ ≤
ℎ1 𝑅1 . 𝜎 (Σ1 ) √𝑅1 𝜎 (𝑃1 )
(35)
Then, it follows from (17) that ‖ℎ‖ 𝑅 . (𝐿 1 ⊗ 𝐼𝑛 ) 𝑥𝐹 + (𝐿 2 ⊗ 𝐼𝑛 ) 𝑥𝐿 ≤ 𝜎 (Σ) √𝑅 𝜎 (𝑃)
(36)
Mathematical Problems in Engineering
5
Then, we get (21) with 1 = ‖ℎ1 ‖𝑅1 /𝜎(𝐿−1 1 )𝜎(Σ1 )√𝑅1 𝜎(𝑃1 ). It means that the states of the followers converge to the convex hull formed by those of the leaders with the containment errors being UUB. The containment control problem is solved. Remark 6. In [24–27], the distributed containment control approaches were proposed for nonlinear Lagrangian systems. However, the previous approaches cannot be applied to the nonlinear multiagent systems (1), (2). Therefore, it is significant to investigate the distributed containment control problem for more general nonlinear multiagent systems in the presence of unknown dynamics.
4. The Design of Distributed Output Feedback Containment Controllers The method proposed in Section 3 required the states of the followers being measurable. However, in practice, some states in the systems are unmeasurable. In this section, the output feedback containment controllers will be designed. We assume here that the states of the leaders are measurable and 𝑟𝑘 (𝑡) = 0. 4.1. Output Feedback Containment Controller Design. Design distributed observers to estimate the unmeasurable states. Let 𝑥̂𝑖 be the estimations of 𝑥𝑖 . Similar to [32–34], the observers are designed in the following form: ̂̇ 𝑖 = 𝐴𝑥̂𝑖 + 𝐵 [𝑢𝑖 + 𝑥
𝜃𝑖𝑇 𝜑𝑖
(𝑥̂𝑖 )] + 𝑐𝑜 𝐹𝑦̃𝑖 ,
𝑦̂𝑖 = 𝐶𝑥̂𝑖 ,
(37)
where 𝑐𝑜 ∈ 𝑅+ is a coupling gain. 𝑦̃𝑖 = 𝑦𝑖 − 𝑦̂𝑖 . 𝐹 ∈ 𝑅𝑛×𝑚 is an observer gain with 𝐹 = 𝑃2−1 𝐶𝑇 , and 𝑃2 is positive definite satisfying the following linear matrix inequality (LMI): [
𝑃2 𝐴 + 𝐴𝑇 𝑃2 − 𝐶𝑇 𝐶 + 𝑄2 𝑀𝑇
[
𝑀 𝐼 ] ≤ 0, − 𝑚 𝛾]
𝑁
(38)
𝑁+𝑀
(39)
𝑢𝑖2 = 𝜃𝑖𝑇 𝜑 (𝑥̂𝑖 ) . 𝑇 𝑇 ] . Then, one has Let 𝑥̂𝐹 = [𝑥̂1𝑇 , . . . , 𝑥̂𝑁
𝑥𝐿̇ = (𝐼𝑀 ⊗ 𝐴) 𝑥𝐿 ,
(41)
𝑁
̂𝑖 − 𝑥̂𝑗 ) + ∑𝑁+𝑀 ̂𝑖 − 𝑥𝑗 ) and 𝑒̂ = [̂ Let 𝑒̂𝑖 = ∑𝑁 𝑒1𝑇 , . . . , 𝑗=1 𝑎𝑖𝑗 (𝑥 𝑗=𝑁+1 𝑎𝑖𝑗 (𝑥 𝑇 𝑇 𝑒̂𝑁 ] . Then 𝑒̂ = (𝐿 1 ⊗ 𝐼𝑛 ) 𝑥̂𝐹 + (𝐿 2 ⊗ 𝐼𝑛 ) 𝑥𝐿 .
(42)
Then ̂𝑒̇ = (𝐼𝑁 ⊗ 𝐴 + 𝑐𝐿 1 ⊗ 𝐵𝐾) 𝑒̂ + 𝑐𝑜 (𝐿 1 ⊗ 𝐹𝐶) 𝑥. ̃
(43)
4.2. Stability Analysis Theorem 7. Consider the multiagent systems given by (1), (2). Under Assumption 1, the communication graph is directed and has a spanning tree. Select the output feedback containment controllers (11), (39) with the coupling gains 𝑐 and 𝑐𝑜 satisfying (19) and (44): 1 𝑐𝑜 ≥ . 2
(44)
𝜃𝑖 are updated by 𝜃𝑖̇ = 𝑇𝜃𝑖 [𝜑𝑖 (𝑥̂𝑖 ) 𝑦̃𝑖𝑇 − (𝜎𝐼𝑛𝑚 +
1 𝜑 (𝑥̂ ) 𝜑𝑇 (𝑥̂ )) 𝜃𝑖 ] , (45) 2𝛾 𝑖 𝑖 𝑖 𝑖
where 𝑇𝜃𝑖 > 0, 𝜎 > 0, and 𝛾 > 0. Then, all the signals in the closed-loop systems are UUB, and the containment control errors satisfy lim 𝜉 ≤ 2 ,
𝑡→∞
(46)
Proof. Consider the Lyapunov function candidate 1 1 ̃ . 𝑉2 = 𝑥̃𝑇 (𝐼𝑁 ⊗ 𝑃2 ) 𝑥̃ + tr (𝜃̃𝑇 𝑇𝜃−1 𝜃) 2 2
(40)
(47)
Substituting 𝐹 = 𝑃2−1 𝐶𝑇 and (41) into the derivative of (47), we have 1 𝑉2̇ = 𝑥̃𝑇 [𝐼𝑁 ⊗ (𝑃2 𝐴 + 𝐴𝑇 𝑃2 − 2𝑐𝑜 𝐶𝑇 𝐶)] 𝑥̃ 2 ̂ + 𝜃∗𝑇 (𝜑 (𝑥) − 𝜑 (𝑥)) ̂ + 𝜀] + 𝑥̃𝑇 (𝐼𝑁 ⊗ 𝑃2 𝐵) [𝜃̃𝑇 𝜑 (𝑥) ̃̇ . + tr (𝜃̃𝑇 Γ𝜃−1 𝜃) (48) By (45) and 𝑀 = 𝐶𝑇 − 𝑃2 𝐵, we have
̂̇ 𝐹 = (𝐼𝑁 ⊗ 𝐴 + 𝑐𝐿 1 ⊗ 𝐵𝐾) 𝑥̂𝐹 + 𝑐 (𝐿 2 ⊗ 𝐵𝐾) 𝑥𝐿 𝑥 ̃ + 𝑐𝑜 (𝐼𝑁 ⊗ 𝐹𝐶) 𝑥,
̃̇ = (𝐼𝑁 ⊗ 𝐴 − 𝑐𝑜 𝐼𝑁 ⊗ 𝐹𝐶) 𝑥̃ 𝑥 ̂ + 𝜃∗𝑇 (𝜑 (𝑥) − 𝜑 (𝑥)) ̂ + 𝜀] . + (𝐼 ⊗ 𝐵) [𝜃̃𝑇 𝜑 (𝑥)
where 2 ∈ 𝑅+ .
where 𝛾 is an adjustable parameter to guarantee the existence of 𝑃2 . 𝑀 = 𝐶𝑇 − 𝑃2 𝐵 and 𝑄2 is positive definite. Based on the developed observers, the output feedback containment controllers are designed in (11) with 𝑢𝑖1 = 𝑐𝐾 [ ∑ 𝑎𝑖𝑗 (𝑥̂𝑖 − 𝑥̂𝑗 ) + ∑ 𝑎𝑖𝑗 (𝑥̂𝑖 − 𝑥𝑗 )] , 𝑗=𝑁+1 [𝑗=1 ]
𝑇 𝑇 ] with 𝑥̃𝑖 = 𝑥𝑖 − 𝑥̂𝑖 being the where 𝑥̃ = [𝑥̃1𝑇, . . . , 𝑥̃𝑁 state estimation errors. The state estimation error equation is described by
1 𝑉2̇ = 𝑥̃𝑇 [𝐼𝑁 ⊗ (𝑃2 𝐴 + 𝐴𝑇 𝑃2 − 2𝑐𝑜 𝐶𝑇 𝐶)] 𝑥̃ 2 ̂ + 𝜀] + 𝑥̃𝑇 (𝐼𝑁 ⊗ 𝑃1 𝐵) [𝜃∗𝑇 (𝜑 (𝑥) − 𝜑 (𝑥))
6
Mathematical Problems in Engineering 𝑁
where 𝑜1 = ‖ℎ2 ‖𝑅2 /𝜎(Σ2 )√𝑅2 𝜎(𝑃2 ) with 𝑅2 = min[𝜎(𝑃),
− 𝜎 tr (𝜃̃𝑇 𝜃) + ∑𝑥̃𝑖𝑇 𝑀𝜃̃𝑖𝑇 𝜑𝑖 (𝑥̂𝑖 )
𝑇𝜃𝑖−1 ], 𝑅2 = max[𝜎(𝑃), 𝑇𝜃𝑖−1 ]. Consider another Lyapunov function candidate
𝑖=1
−
1 𝑁 𝑇 ∑𝜑 (𝑥̂ ) 𝜃 𝜃̃𝑇 𝜑 (𝑥̂ ) . 2𝛾 𝑖=1 𝑖 𝑖 𝑖 𝑖 𝑖 𝑖
1 ̂. 𝑉3 = 𝑒̂𝑇 (𝐿−1 1 ⊗ 𝑃1 ) 𝑒 2
(49) Using Young’s inequality, 𝛾 1 𝑥̃𝑖𝑇 𝑀𝜃̃𝑖𝑇 𝜑𝑖 (𝑥̂𝑖 ) ≤ 𝑥̃𝑖𝑇 𝑀𝑀𝑇 𝑥̃𝑖 + 𝜑𝑖𝑇 (𝑥̂𝑖 ) 𝜃̃𝑖 𝜃̃𝑖𝑇 𝜑𝑖 (𝑥̂𝑖 ) . 2 2𝛾 (50) Then 1 𝑉2̇ ≤ 𝑥̃𝑇 [𝐼𝑁 ⊗ (𝑃2 𝐴 + 𝐴𝑇 𝑃2 + 𝛾𝑀𝑀𝑇 − 2𝑐𝑜 𝐶𝑇 𝐶)] 𝑥̃ 2 ̂ + 𝜀] + 𝑥̃𝑇 (𝐼𝑁 ⊗ 𝑃1 𝐵) [𝜃∗𝑇 (𝜑 (𝑥) − 𝜑 (𝑥))
Substituting 𝐾 = −𝐵𝑇 𝑃1 and (43) into the derivative of (57), we have 1 𝑇 𝑇 ̂ 𝑉3̇ = 𝑒̂𝑇 [𝐿−1 1 ⊗ (𝑃1 𝐴 + 𝐴 𝑃1 ) − 2𝑐𝐼𝑁 ⊗ 𝑃1 𝐵𝐵 𝑃1 ] 𝑒 2 (58) 𝑇 ̃ + 𝑒̂ (𝑐𝑜 𝐼𝑁 ⊗ 𝐹𝐶) 𝑥. Then
(51)
1 𝑁 − 𝜎 tr (𝜃̃𝑇 𝜃) − ∑𝜑𝑖𝑇 (𝑥̂𝑖 ) 𝜃𝑖∗ 𝜃̃𝑖𝑇 𝜑𝑖 (𝑥̂𝑖 ) . 2𝛾 𝑖=1
1 ̃ . 𝑉3̇ ≤ − min (𝜆−1 ) 𝜎 (𝑄1 ) ‖̂ 𝑒‖2 + ‖̂ 𝑒‖ 𝜎 (𝐹𝐶) ‖𝑥‖ 2 𝑖=1,...,𝑁 𝑖
(59)
Noting the fact that 𝑒‖ ≥ ‖̂
It follows from (38) and (44) that 1 𝑉2̇ ≤ − 𝑥̃𝑇 (𝐼𝑁 ⊗ 𝑄2 ) 𝑥̃ 2
2𝜎 (𝐹𝐶) ̃ ‖𝑥‖ min𝑖=1,...,𝑁 (𝜆−1 𝑖 ) 𝜎 (𝑄1 )
(60)
indicates 𝑉3̇ ≤ 0. Considering (42) and (56), it follows that
̂ + 𝜀] + 𝑥̃𝑇 (𝐼𝑁 ⊗ 𝑃1 𝐵) [𝜃∗𝑇 (𝜑 (𝑥) − 𝜑 (𝑥))
(52)
𝑁
1 + 𝜎 tr (𝜃 𝜃) − ∑𝜑𝑖𝑇 (𝑥̂𝑖 ) 𝜃𝑖∗ 𝜃̃𝑖𝑇 𝜑𝑖 (𝑥̂𝑖 ) . 2𝛾 𝑖=1 ̃𝑇
(57)
By Lemma 4, it follows that 𝜑𝑖 (𝑥𝑖 ) and 𝜑𝑖 (𝑥̂𝑖 ) are bounded. Then, there exist positive constants 𝜌𝑀 and 𝜑𝑀, such that ̂ + 𝜀‖ ≤ 𝜌𝑀, ‖𝜑𝑖 (𝑥̂𝑖 )‖ ≤ 𝜑𝑀. Then, (52) can ‖𝜃∗𝑇 (𝜑(𝑥) − 𝜑(𝑥)) be rewritten as 1 2 ̃ 2 − 𝜎𝜃̃𝐹 + ‖𝑥‖ ̃ 𝜎 (𝑃1 𝐵) 𝜌𝑀 𝑉2̇ ≤ − 𝜎 (𝑄2 ) ‖𝑥‖ 2 1 2 + 𝜃̃𝐹 (𝜎𝜃𝑀 + 𝜑𝑀 𝜃𝑀) . 2𝛾
(53)
𝑇 ̃ 𝜃̃𝐹 ] , 𝑧2 = [‖𝑥‖ 1 2 𝜑 𝜃 ], 2𝛾 𝑀 𝑀
(54)
Rewrite (53) in the following form: (55)
Using a similar analysis process to Section 3.2, it follows that 𝑥̃ and 𝜃̃ are UUB and the bound of 𝑥̃ is given by ̃ ≤ 𝑜1 , ‖𝑥‖
̃ Then, (46) is obtained Note the fact that ‖𝜉‖ ≤ ‖𝑥̂𝐹 −𝑥𝑑𝐿 ‖+‖𝑥‖. with 2 =
2𝜎 (𝐹𝐶) 𝑜1 + 𝑜1 . −1 min𝑖=1,...,𝑁 (𝜆−1 𝑖 ) 𝜎 (𝐿 1 ) 𝜎 (𝑄1 )
(62)
Remark 8. In [14], consensus scheme was developed for nonlinear multiagent systems (1); that is, the proposed method can guarantee all states of the followers synchronize to that of a single leader. In this paper, containment control approach is designed to guarantee all states of the followers stay in a dynamic convex hull formed by multiple leaders.
5. Simulation In this section, a simulation example is provided to show the effectiveness of the proposed distributed output feedback containment controllers. Consider a network of harmonic oscillators described by (1), with [35]
1 − 𝜎 (𝑄2 ) 0 ]. Σ2 = [ 2 0 𝜎
𝑉2̇ ≤ −𝑧2𝑇 Σ2 𝑧2 + ℎ2 𝑧2 .
(61)
Then, the containment control problem is solved.
Let
ℎ2 = [𝜎 (𝑃𝐵) 𝜌𝑀 𝜎𝜃𝑀 +
2𝜎 (𝐹𝐶) ̂ 𝑜1 . 𝑥𝐹 − 𝑥𝑑𝐿 ≤ −1 min𝑖=1,...,𝑁 (𝜆−1 𝑖 ) 𝜎 (𝐿 1 ) 𝜎 (𝑄1 )
(56)
0 1 𝐴=[ ], −1 0 𝐶 = [1 0] ,
1 𝐵 = [ ], 0
2 + sin (𝑥𝑖1 ) 𝑥𝑖2 , 𝑓𝑖 (𝑥𝑖 ) = 𝑥𝑖1 𝑥𝑖2
𝑖 = 1, 2, 3, 4,
𝑘 = 5, 6.
(63)
Mathematical Problems in Engineering 5
1
7
2
3
2 4
3
6
1
Figure 1: The communication graph. 0 5
−1
4
5
0
10
15
t (s)
3
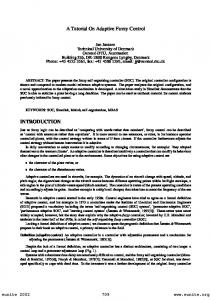
Figure 3: Follower states 𝑥𝑖2 (solid line), leader states 𝑥𝑘2 (dotted line).
2 1 0
2
−1 0
5
10
15
1
t (s)
Figure 2: Follower states 𝑥𝑖1 (solid line), leader states 𝑥𝑘1 (dotted line).
0 −1
Choose fuzzy membership functions as
0
𝜇𝐹𝑖,1𝑙 (𝑥̂𝑖,1 ) = exp [−
(𝑥̂𝑖,1 − 3 + 𝑙) ], 4 2
𝜇𝐹𝑖,2𝑙 (𝑥̂𝑖,2 )
(𝑥̂𝑖,2 − 3 + 𝑙) = exp [− ], 16
x1,1 x1,2
(64)
where 𝑙 = 1, . . . , 5. The communication graph is described in Figure 1. Let 𝛾 = 2/3 and solve (13) and (38). Then 𝑃1 = [
2.749 −1.406 ], −1.406 3.592 1.149 𝐹=[ ], 0.281
𝑃2 = [
5
10
15
t (s)
2
0.925 −0.224 ], −0.224 0.915
𝐾 = [−2.749 1.406] . (65)
In simulation, 𝑐𝑜 = 10, 𝑐 = 2, 𝑇𝜃𝑖 = 10, and 𝜎 = 0.01. The containment results and containment errors using the output feedback containment controllers of this paper are shown in Figures 2 and 3. It can be observed that the proposed containment scheme can realize that the states of followers converge to the convex hull formed by those of the leaders; that is, the states of all followers stay in the area formed by the leaders. Figure 4 shows the states of developed observer, from which we can see that the designed
̂ 1,1 x ̂ 1,2 x
Figure 4: The estimation effect of observers.
observer can estimate unmeasurable states with the estimation errors in a small neighborhood of the origin. The profiles of the designed distributed output feedback containment controllers are shown in Figure 5. It can be observed that the designed containment controllers guarantee both the stability and good containment performance of the closedloop multiagent systems with unknown dynamics. Figure 6 shows the profiles of 𝑢12 , from which it can be observed that the unknown dynamics 𝑓𝑖 (𝑥𝑖 ) can be compensated by 𝑢𝑖2 .
6. Conclusions In this paper, the containment control problems were considered for uncertain nonlinear multiagent systems with measurable and unmeasurable states under directed graphs. Based on FLSs identifying the unknown dynamics of the followers, distributed state feedback containment controllers were designed first. Then, adaptive fuzzy observers were designed to estimate the unmeasurable states. Based on
8
Mathematical Problems in Engineering
Acknowledgments
10
This work is partially supported by the Scientific Research Fund of Liaoning Provincial Education Department (L2013244) and in part by Research Foundation of Liaoning University of Technology for Young Teachers (X201313).
0
−10
References
−20
−30 5
0
10
15
t (s) u1 u2
u3 u4
Figure 5: Profiles of control inputs.
5
4 3 2 1 0 −1 0
5
10
15
t (s) f1 (x1 ) u12
Figure 6: Profiles of 𝑓1 (𝑥1 ) and 𝑢12 .
the developed observers, distributed output feedback containment controllers were designed. Both of the developed containment controllers ensure that the states of the followers converge to the convex hull formed by those of the leaders with the containment control errors in a small residual set. Future research efforts will be devoted to the containment control problem of uncertain nonlinear multiagent systems with time-delay.
Conflict of Interests The authors declare that there is no conflict of interests regarding the publication of this paper.
[1] X.-G. Yan, J.-J. Wang, X.-Y. Lu, and S.-Y. Zhang, “Decentralized output feedback robust stabilization for a class of nonlinear interconnected systems with similarity,” IEEE Transactions on Automatic Control, vol. 43, no. 2, pp. 294–299, 1998. [2] X. G. Yan, S. K. Spurgeon, and C. Edwards, “Decentralized output feedback sliding mode control of nonlinear large-scale systems with uncertainties,” Journal of Optimization Theory and Applications, vol. 119, no. 3, pp. 597–614, 2003. [3] X.-G. Yan, C. Edwards, and S. K. Spurgeon, “Decentralised robust sliding mode control for a class of nonlinear interconnected systems by static output feedback,” Automatica, vol. 40, no. 4, pp. 613–620, 2004. [4] X.-G. Yan, S. K. Spurgeon, and C. Edwards, “Decentralised stabilisation for nonlinear time delay interconnected systems using static output feedback,” Automatica, vol. 49, no. 2, pp. 633– 641, 2013. [5] J. A. Fax and R. M. Murray, “Information flow and cooperative control of vehicle formations,” IEEE Transactions on Automatic Control, vol. 49, no. 9, pp. 1465–1476, 2004. [6] R. W. Beard, J. Lawton, and F. Y. Hadaegh, “A coordination architecture for spacecraft formation control,” IEEE Transactions on Control Systems Technology, vol. 9, no. 6, pp. 777–790, 2001. [7] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and cooperation in networked multi-agent systems,” Proceedings of the IEEE, vol. 95, no. 1, pp. 215–233, 2007. [8] W. Ren, R. W. Beard, and E. M. Atkins, “Information consensus in multivehicle cooperative control,” IEEE Control Systems Magazine, vol. 27, no. 2, pp. 71–82, 2007. [9] A. Das and F. L. Lewis, “Distributed adaptive control for synchronization of unknown nonlinear networked systems,” Automatica, vol. 46, no. 12, pp. 2014–2021, 2010. [10] H. W. Zhang and F. L. Lewis, “Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics,” Automatica, vol. 48, no. 7, pp. 1432–1439, 2012. [11] Y. Hong, J. Hu, and L. Gao, “Tracking control for multiagent consensus with an active leader and variable topology,” Automatica, vol. 42, no. 7, pp. 1177–1182, 2006. [12] Y. G. Hong, G. R. Chen, and L. Bushnell, “Distributed observers design for leader-following control of multi-agent networks,” Automatica, vol. 44, no. 3, pp. 846–850, 2008. [13] W. S. Chen, X. B. Li, and L. C. Jiao, “Quantized consensus of second-order continuous-time multi-agent systems with a directed topology via sampled data,” Automatica, vol. 49, no. 7, pp. 2236–2242, 2013. [14] W. Wang, D. Wang, and Z. H. Peng, “Cooperative fuzzy adaptive output feedback control for synchronisation of nonlinear multiagent systems under directed graphs,” International Journal of Systems Science, 2014. [15] W. Ren and N. Sorensen, “Distributed coordination architecture for multi-robot formation control,” Robotics and Autonomous Systems, vol. 56, no. 4, pp. 324–333, 2008.
Mathematical Problems in Engineering [16] Z. Peng, D. Wang, Z. Chen, X. Hu, and W. Lan, “Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics,” IEEE Transactions on Control Systems Technology, vol. 21, no. 2, pp. 513–520, 2013. [17] M. Ji, G. Ferrari-Trecate, M. Egerstedt, and A. Buffa, “Containment control in mobile networks,” IEEE Transactions on Automatic Control, vol. 53, no. 8, pp. 1972–1975, 2008. [18] G. Shi and Y. Hong, “Set tracking of multi-agent systems with variable topologies guided by moving multiple leaders,” in Proceedings of the 49th IEEE Conference on Decision and Control (CDC ’10), pp. 2245–2250, Atlanta, Ga, USA, December 2010. [19] Y. Cao, W. Ren, and M. Egerstedt, “Distributed containment control with multiple stationary or dynamic leaders in fixed and switching directed networks,” Automatica, vol. 48, no. 8, pp. 1586–1597, 2012. [20] Y. Lou and Y. Hong, “Multi-leader set coordination of multiagent systems with random switching topologies,” in Proceedings of the 49th IEEE Conference on Decision and Control (CDC ’10), pp. 3820–3825, Atlanta, Ga, USA, December 2010. [21] Y. C. Cao, D. Stuart, W. Ren, and Z. Y. Meng, “Distributed containment control for multiple autonomous vehicles with double-integrator dynamics: algorithms and experiments,” IEEE Transactions on Control Systems Technology, vol. 19, no. 4, pp. 929–938, 2011. [22] J. Z. Li, W. Ren, and S. Y. Xu, “Distributed containment control with multiple dynamic leaders for double-integrator dynamics using only position measurements,” IEEE Transactions on Automatic Control, vol. 57, no. 6, pp. 1553–1559, 2012. [23] Z. Li, W. Ren, X. Liu, and M. Fu, “Distributed containment control of multi-agent systems with general linear dynamics in the presence of multiple leaders,” International Journal of Robust and Nonlinear Control, vol. 23, no. 5, pp. 534–547, 2013. [24] Z. Meng, W. Ren, and Z. You, “Distributed finite-time attitude containment control for multiple rigid bodies,” Automatica, vol. 46, no. 12, pp. 2092–2099, 2010. [25] J. Mei, W. Ren, and G. F. Ma, “Distributed containment control for Lagrangian networks with parametric uncertainties under a directed graph,” Automatica, vol. 48, no. 4, pp. 653–659, 2012. [26] J. Mei, W. Ren, B. Li, and G. Ma, “Containment control for networked unknown Lagrangian systems with multiple dynamic leaders under a directed graph,” in Proceedings of the 1st American Control Conference (ACC ’13), pp. 522–527, Washington, DC, USA, June 2013. [27] D. Yu, L. J. Bai, and W. J. Ren, “Finite time containment control of nonlinear multi-agent networks,” in Proceedings of the 25th Chinese Control and Decision Conference (CCDC '13), pp. 707– 712, Guiyang, China, May 2013. [28] S. C. Tong, T. Wang, and J. T. Tang, “Fuzzy adaptive output tracking control of nonlinear systems,” Fuzzy Sets and Systems, vol. 111, no. 2, pp. 169–182, 2000. [29] S. Tong, C. Liu, and Y. Li, “Fuzzy-adaptive decentralized output-feedback control for large-scale nonlinear systems with dynamical uncertainties,” IEEE Transactions on Fuzzy Systems, vol. 18, no. 5, pp. 845–861, 2010. [30] S. Tong and Y. Li, “Adaptive fuzzy output feedback tracking backstepping control of strict-feedback nonlinear systems with unknown dead zones,” IEEE Transactions on Fuzzy Systems, vol. 20, no. 1, pp. 168–180, 2012. [31] L.-X. Wang and J. M. Mendel, “Fuzzy basis functions, universal approximation, and orthogonal least-squares learning,” IEEE Transactions on Neural Networks, vol. 3, no. 5, pp. 807–814, 1992.
9 [32] S.-C. Tong, X.-L. He, and H.-G. Zhang, “A combined backstepping and small-gain approach to robust adaptive fuzzy output feedback control,” IEEE Transactions on Fuzzy Systems, vol. 17, no. 5, pp. 1059–1069, 2009. [33] S. Tong and Y. Li, “Observer-based fuzzy adaptive control for strict-feedback nonlinear systems,” Fuzzy Sets and Systems, vol. 160, no. 12, pp. 1749–1764, 2009. [34] S. Tong, B. Huo, and Y. Li, “Observer-based adaptive decentralized fuzzy fault-tolerant control of nonlinear large-scale systems with actuator failures,” IEEE Transactions on Fuzzy Systems, vol. 22, no. 1, pp. 1–15, 2014. [35] Z. K. Li, Z. S. Duan, and G. R. Chen, “Dynamic consensus of linear multi-agent systems,” IET Control Theory & Applications, vol. 5, no. 1, pp. 19–28, 2011.
Advances in
Operations Research Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Journal of
Applied Mathematics
Algebra
Hindawi Publishing Corporation http://www.hindawi.com
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Journal of
Probability and Statistics Volume 2014
The Scientific World Journal Hindawi Publishing Corporation http://www.hindawi.com
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at http://www.hindawi.com International Journal of
Advances in
Combinatorics Hindawi Publishing Corporation http://www.hindawi.com
Mathematical Physics Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
International Journal of Mathematics and Mathematical Sciences
Mathematical Problems in Engineering
Journal of
Mathematics Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Discrete Dynamics in Nature and Society
Journal of
Function Spaces Hindawi Publishing Corporation http://www.hindawi.com
Abstract and Applied Analysis
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
International Journal of
Journal of
Stochastic Analysis
Optimization
Hindawi Publishing Corporation http://www.hindawi.com
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
Volume 2014