Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2017 August 6-9, 2017, Cleveland, Ohio, USA
DETC2017-68093
THE DIMENSION MATCH AND PARAMETERS SETTING OF THE HYDRAULIC MOTOR FOR THE HYDRAULIC-ELECTROMAGNETIC ENERGY-REGENERATIVE SHOCK ABSORBER Jia Mi1, Lin Xu1*, Sijing Guo1,2, Mohamed A. A. Abdelkareem1, Lingshuai Meng1, Lei Zuo2 1 School of Automotive Engineering, Wuhan University of Technology, Wuhan, 43070, China 2Department of Mechanical Engineering, Virginia Tech, Blacksburg, VA 24060, USA *
[email protected]
ABSTRACT Hydraulic-electromagnetic Energy-regenerative Shock Absorber (HESA) has been proposed recently, with the purpose of mitigating vibration in vehicle suspensions and recovering vibration energy traditionally dissipated by oil dampers simultaneously. The HESA is composed of hydraulic cylinder, check valves, accumulators, hydraulic motor, generator, pipelines and so on. The energy conversion from hydraulic energy to mechanical energy mainly depends on the hydraulic motor between two accumulators. Hence, the dimension match and parameter settings of hydraulic motor for the HESA are extremely important for efficiency of the whole system. This paper studies the methods and steps for dimension matching and parameter settings of the hydraulic motor in a case of a typical commercial vehicle. To evaluate suspension’s vibration characteristics, experiments on the target tour bus have been done. Simulations are conducted to investigate the effects of the hydraulic motor in different working conditions. The simulation results verify that the methods and steps adopted are accurate over a wide range of operating conditions and also show that appropriate matching and parameter settings of the hydraulic motor attached in the HESA can work with high efficiency and then effectively improving energy conversion efficiency for the whole system. Therefore, the theory of the matching progress can guide the future design of an HESA.
dynamics. There is great energy harvesting potential among this vehicle vibration that could reduce fuel consumption and solve some energy supply problems, such as the self-powered active absorbers, sensors and the railroad facilities[1] [2] . At the beginning, Efatpenah’s team[3]indicated that vehicle suspensions have a substantial energy-harvesting potential. Then, the earliest Energy-Harvesting Shock Absorbers (EHSAs) were respectively proposed by Karnopp, Fodor and Redfield[4], Suda[5] and Shiiba [6],and etc. In terms of modified from traditional active suspensions, they adopted a linear electromagnetic motor and validated the feasibility by carrying out systematic research on dynamic model, simulation analyses, prototype production and bench tests [7]. Furthermore, the structures of the EHSAs became various, such as transforming the relative linear movement between sprung mass and unspring mass into the rotation of the electric motor rotor[8] by using hydraulic transmission systems [9] and variable linear transmission [10]. With great energy potential in vehicle suspensions, EHSAs attract more and more attentions. Hence, most of them can be divided into 3 main types at present: Mechanical-hydraulic (including the crank connecting rod type, hydrostatic energy storage type), Electromagnetic (including the linear motor, ball screw, gear and rack type and the electromagnetic coil), and Hydraulic Electromagnetic. Guo and Xu [11-14] designed the hydraulic electromagnetic energy regenerative solution, and they carried out systematic researches on dynamic model, simulation analyses, prototype production and bench tests. The mathematical model of a hydraulic electromagnetic energy regenerative shock absorber was built and comparison results of theoretical simulation and bench tests had revealed the energy harvesting potential and
INTRODUCTION Suspension systems play a critical role on riding comfort and road handling of a vehicle. Typically, traditional suspension system dissipates the vibration energy in suspension as heat waste through viscous friction, so as to achieve expected vehicle
1
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
correction of simulation models of the HESA. Their team carried a lot of detailed researches subsequently. Guo found EHSAs can not only recycle vibration energy but also improve ride performances[15]. Consequently, comprehensive studies have been conducted for both simulations and bench tests[16]. A real road vehicle testing has been demonstrated in [17].Moreover, with the flexibility of the hydraulic systems, HESAs can be interconnected to achieve enhanced overall vehicle performances[18]. Peng, M. .et al [19] presented a novel application of hydraulic electromagnetic energy-regenerative shock absorber (HESA) into commercial vehicle suspension system and vehicle road performance are simulated by the evaluating indexes. When offering reliable damping force for vehicle suspension system, HESA could regenerate power from 41.72 to 339.88 W (RMS) with vehicle speed ranging from 30 to 70 km/h on Class B and Class C random road. Zhou, Q. et al[20] presented a concept of a novel energy-harvesting device, which was applied in off-highway vehicles based on hydro-pneumatic suspension, namely, Electro-Hydraulic Energy-Harvesting Suspension (EHEHS). While, Mi et al[21], presented a novel application of the HESA into bogie system of railway vehicles and found HESA-Bogie can effectively reduce the impact between wheel and rail tracks, while maintaining good potential to recycle vibratory energy. Observably, most of previous researchers mainly focused on the specific applications but spared insufficient effort on the design of key part in HESA. As the energy conversion from hydraulic energy to mechanical energy greatly depends on hydraulic motor, approaches of matching and parameter settings of the hydraulic motor for HESA is proposed in this paper, in order to guide future design of an HESA. This paper is organized as follows. The dynamic modeling and design principle are presented in Section 2. While, the progress of the dimension matching and parameter settings are presented in Section 3. Finally, simulation tests are conducted in Section 4.
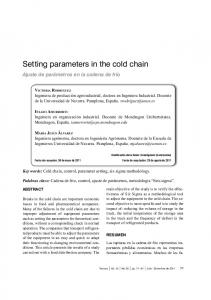
FIG 1. DESIGN PRINCIPLE OF THE HYDRAULIC ELECTROMAGNETIC ENERGY HARVESTING SHOCK ABSORBER (HESA) A reciprocal piston divide each cylinder into two chambers, and each chamber is connected through transmission pipelines with appropriate valves and then to hydraulic motor, the upper chamber without rod is called head port and the lower chamber with rod is called rod port. Its working process is as follows: At first, the piston of the hydraulic cylinder is drove to reciprocate under external excitation, and oil flows through valve system for rectification; then, oil flows through accumulator for weakening fluctuations; finally, the continuously steady oil flow drives hydraulic motor to convert mechanical kinetic energy applied by hydraulic pressure into another form of energy. When hydraulic cylinder is compressed, check valve 1 & 4 open and check valve 2 & 3 close, high-pressure oil in head port directly flows through check valve 1 and then through accumulator 1 to rotate hydraulic motor, then back to rod port after through accumulator 2 and check valve 4, the excess oil can be stored in accumulator 2 temporary. Compression stroke has two situations, if pressure of the system is lower than cracking pressure of damper’s internal compression valve, the oil is extruded by piston and would totally participate in generating electricity, the damping of the system depends on the state of the generator; if pressure of the system is higher than cracking pressure of internal compression valve, the oil is extruded by piston and would not flow through hydraulic motor, the damping of the system doesn’t depend on the state of the generator but performance parameters of internal compression valve. When it is extended, check valve 1 & 4 close and check valve 2 & 3 open, the high-pressure oil in rod port flows through check valve 3 to rotate hydraulic motor after stabilization of hydraulic accumulator 1, rotating generator and storing generated energy into battery through the current control circuit to supply electric consumption for other power components, then the oil back to the head port through accumulator 2 and check valve 2. In the whole system, two different accumulators have been arranged in the front and back of hydraulic motor respectively, accumulator 1 is to rectify and filter hydraulic liquid so as to improve working efficiency of hydraulic motor; accumulator 2 is to eliminate the influence of volume changes of pole chamber and no-pole chamber, and guarantee returning speed of liquid to prevent force-lag phenomenon in piston cylinder.
2. DYNAMIC MODELING AND DESIGN PRINCIPLE
2.1The principle of hydraulic electromagnetic shock absorber (HESA) HESA is composed of hydraulic cylinder, check valves, accumulators, hydraulic motor, generator, pipelines and so on. In HESA, the high-pressure oil produced by the reciprocation of shock absorber could be exported to drive hydraulic motor, so as to drive the generator to generate electricity. In this way, HESAs regenerate the mechanical vibrational energy that is otherwise dissipated by the traditional shock absorber as heat energy. The working principle of HESA is shown in Figure 1. It’s a mechanical-electromagnetic-hydraulic coupling system, composed of hydraulic cylinder, check valves, accumulators, hydraulic motor, generator, pipelines etc. HESA is transformed on the basis of the traditional hydraulic shock absorber and hydraulic cylinder is installed in the position of conventional shock absorbers when it is equipped on vehicle suspension.
2
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
TABLE 1. THE BASIC SUSPENSION PARAMETERS
2.2 Dynamics Modeling
Parameter Sprung mass Unsprung mass of the front axle Suspension stiffness of the front axle Single tire stiffness of the front axle Suspension damping of the front axle
In the modeling, following assumptions have been made. 1) The suspension is working at a constant temperature of 20℃, and the oil viscosity is a fixed value. 2) The fluid is incompressible. 3) The volume efficiency of the hydraulic motor is ignored. When absorber is in working conditions, the velocity of the piston 𝒗𝑷 can be expressed as:
𝒗𝑷 = 𝟐𝝅𝒇. 𝑨
The dimension match and parameters setting of HESA can’t adapt to all working conditions, for road condition and traveling state are polytropic. Hence, the most typical working condition should be calibrated to make it work at optimal efficiency. For regular road, the road is taken as an ISO (ISO/TC 108/SC2N67) classified road with road roughness spectrum, and the road roughness can be divided into 8 class. The power spectral density (PSD) can be expressed by the time frequency 𝒇 as expressed in equation (5) 𝒖 𝑺(𝒇)=𝑮𝟎 𝟐 (5)
(1)
The flow 𝑸 through hydraulic motor can be expressed as: 𝑫𝟐 −𝒅𝟐 ) 𝟒
𝑸 = 𝒗𝑷 𝝅(
(2)
The relationship between displacement 𝒒 and flow 𝑸 of hydraulic motor can be expressed as:
(3)
𝑸 = 𝒏. 𝒒
𝒇
The damping force 𝑭 acting on piston can be expressed as: 𝑫 𝟐 𝑭=P. 𝝅( ) 𝟐
Value 6360kg 500kg 150000N/m 980000N/m 10000N.s/m
Where 𝒇 is the time frequency which equals to the product of the speed (𝒖) and spatial frequency (n), 𝑮0 is the coefficient of road roughness. According to (5), there have same affection to road excitation by increasing speed or increasing coefficient of road roughness. The model of’ road surface irregularity can be described by a linear system. The input of this linear system is random white-noise 𝝎 and the output is displacement of road roughness 𝒁(𝒈) through lowpass filter 𝑮(𝒋𝝎) . The power spectral density can be described by random filter white noise.
(4)
Where 𝒇 is the vibrational frequency and 𝑨 is the amplitude of the absorber, 𝒗 is the velocity of the piston, 𝑫 and 𝒅 are the diameters of the piston and the rod, P is the pressure on the piston.
2.3 The dynamic analysis of the target commercial vehicle To make specific modeling and simulation, a tour bus as a typical commercial vehicle has been considered. The target vehicle’s appearance is shown in Figure 2. The front axle is equipped with Macpherson suspension and double-tire is furnished in the rear axle, which is equipped with air suspension. The specific vehicle parameters are shown in Table 1.
𝑺(𝒇) =
𝑮𝟎 𝒖 𝒇𝟐
= |𝑮(𝒇) |2𝝈𝟐
(6) .(7)
𝒁(𝒈) = 𝑮(𝒋𝝎) 𝝎
Where 𝝈𝟐 is the variance of the random white-noise 𝝎 and it’s value is 1. To factually mirror the road-surface spectrum at low frequencies, a lower frequency cut-offs 𝒇𝟐𝟎 should be introduced to the model of road surface irregularity. 𝑮 𝒖 𝑺(𝒇) = 𝟎 = |𝑮 |2. 𝝈𝟐 (8) 𝒇𝟐 +𝒇𝟐𝟎
(𝒇)
Then, transfer function of low-pass frequency wave 𝑮(𝒔) can be rewrote as:
𝑮(𝒔) =
𝟐𝝅𝟏 √𝑮𝒘′ 𝒖
(9)
𝑺+𝟐𝝅𝒇𝟎
From equation (9), we can get the displacement of road roughness expression in time-domain as equation (10).
𝐙̇𝐠 (𝐭) = −𝟐𝛑𝐟𝟎 𝐳𝐠 (𝐭) + 𝟐𝛑 ⋅ √𝐆𝟎 𝐮𝛚(𝐭)
(10)
Conventionally, the value of the 𝐟𝟎 is about 0.1 𝑯𝒛 to insure the input of displacement PSD consistent with actual road roughness spectrum, and the value of the 𝐆𝟎 is suggested by ISO8608 in Table 2.
FIG 2. THE TARGET RESEARCH TYPE
3
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Road Class
A B C D E F 𝐺 H
According to [23],after being filtrated and gotten rid of the zero wander as well as noise, test data can be transformed into displacement and acceleration of the absorber, shown in Fig 4 and 5, and then being Fourier transformed to acquire the PSD of the absorber’s acceleration, shown in Fig 6. The expression of the Fast Fourier Transform (FFT) can be written as:
TABLE 2 ISO8608 VALUES OF 𝐆𝟎 AND 𝛔𝟎 𝐆𝟎 /(𝟏𝟎−𝟔 𝒎𝟑 ) 𝛔𝟎 //(𝟏𝟎−𝟑 𝒎) Average value Average value 16 64 256 1024 4096 16384 65536 262144
Very good Good Average Poor Very poor
3.81 7.61 15.23 30.45 60.90 121.80 243.61 487.22
𝑷𝒙𝒙 (𝒆𝒙𝒑(ⅈ𝝎)) = ∑∞ 𝒕=𝟏 𝒓𝒙𝒙 (𝒕) 𝒆𝒙𝒑(−ⅈ𝝎) (12) Where 𝑟𝑥𝑥 (𝑡) is the self-correlation function for test data.
The most typical working condition for the target tour bus is commuting between various scenery areas, so the speed is about 70km/h under road Class C. Hence, the average values of 𝐆𝟎 and 𝛔𝟎 are 256*𝟏𝟎−𝟔 𝒎𝟑 15.23*𝟏𝟎−𝟑 𝒎. The mean power in suspension can be obtained:
𝑷𝒂𝒗𝒆 = 𝝅𝑮𝟎 𝒖𝒌𝟏
(11)
There is an observation in [22] that the mean power in the suspension due to road roughness is proportional to roughness coefficient 𝐆𝟎 , vehicle travel speed 𝐮, and tire stiffness 𝐤 𝟏 . It has nothing to do with suspension stiffness or damping, sprung or unsprung masses. This conclusion is based on an assumption that road velocity due to road roughness is white noise, whose intensity is proportional to roughness coefficient 𝐆𝟎 and vehicle travel speed 𝐮. Due to the flatness of white noise spectrum, high vehicle travel speed will increase the excitation at all frequencies uniformly, resulting an average power independent of mechanical low-pass filter effect. From equation (11) and Table (1), general energy harvesting potential for bus can be estimated about 200w-2kw. The diameters of the piston and piston rod are set as 65mm and 26mm, respectively. To evaluate suspension’s vibration characteristics induced by road roughness, experiments on the target tour bus have been done. A laser head is directly mounted on the rear shock absorber to measure its vibration characteristics, real-time data can be collected from laminate receiver, as shown in Fig 3.
FIG 4.THE DISPLACEMENT OF THE ABSORBER UNDER THE CLASS C WITH THE SPEED OF 70KM/H
FIG 5.THE ACCELERATION OF THE ABSORBER UNDER THE CLASS C WITH THE SPEED OF 70KM/H
FIG 6. THE ABSORBER’S ACCELERATION FREQUENCY SPECTRUM
FIG 3. EXPERIMENT SETUP FOR ROAD ROUGHNESS TESTS
4
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
According to Fig 4 and Fig 6, the vibration characteristics can be simplified as the sinewave of 15mm/3.5Hz. Then, put the simplified stimulation to quarter car model (Fig 7) in AMESim, force and velocity varieties of piston can be get in Figure 8 and Figure 9. Hence, the peak value of the piston force and average value of the velocity are 4000N and 0.226m/s.
For the diameters of piston and piston rod having been set as 65mm and 26mm, conclusions about hydraulic working conditions can be made from equations (1) -(4) and simulations: the average flow rate is 37.8L/min and the maximum pressure in hydraulic system is 1.4Mpa(14bar). All the typical parameters for this commercial tour bus and its working conditions can be concluded in Table 3. TABLE 3. TYPICAL PARAMETERS AND WORKING CONDITIONS FOR THE TARGET COMMERCIAL TOUR BUS Parameter
Value
𝐷 D 𝑄 P 𝑅 V 𝑉𝑃
0.065m 0.026m 37.8L/min 1.4MPa C 70km/h 0.226m/s
𝐹𝑃
4500N
𝑓
3.5Hz
𝐴
0.015m
Nomenclature
Piston diameter Piston rod diameter Flow rate Maximum pressure Typical road class Typical speed Mean velocity of the piston Mean force at piston accumulator at State 0 Simplified frequency of the stimulation Simplified amplitude of the stimulation
3.DIMENSION MATCHING AND PARAMETER SETTINGS OF THE HYDRAULIC MOTOR
FIG 7.THE QUARTER CAR MODEL IN AMESim
3.1 The analysis of hydraulic motor Hydraulic motor is a kind of energy conversion device transforming hydraulic energy into mechanical energy in form of rotary motion. The main performance parameters for hydraulic motor are: displacement, rated pressure and speed, maximum pressure and shaft speed. There are a variety of hydraulic motors applying to multifarious occasions, they can be divided into high-speed motor and low-speed motor according to its rated speed and the criterion demarcation is 500r/min. If the rated speed exceeds 500r/rad, it is a high-speed motor and high-speed motor can be further subdivided into gear-type, screw, vane-type, radial-piston, etc. The main feature for the high-speed motor is that the inertia is small and with high adjust sensitivity, therefore, it’s very easy to star and stop. Hence, it can also be called the high-speed low-torque hydraulic motor. As for the low-speed motor, fundamental form is radial-piston, and there are also some other kinds of low-speed motor. The main features for the lowspeed motor are that they have large displacement and torque, at the same time, their volume is larger than the high-speed motor. Hence, it can also be called low-speed high -torque hydraulic motor. The synthetic characteristics comparisons for these typical motors are summed in Table 4.
FIG 8. THE FORCE AT PISTON
FIG 9. THE VELOCITY OF THE PISTON
5
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
TABLE 4. THE SYNTHETIC CHARACTERISTICS COMPARISON FOR HYDRAULIC MOTOR Type
Nominal Displacement
Discharge Rate(L/min)
0.5MPa
3.5MPa
pillars of businesses such as hydraulic and pneumatic systems, various kinds of inspection and testing machines and automotive parts worldwide. It is worth stressing that, the match of the hydraulic motor just choose this company as a typical company but not restricted to this company’s products, steps and methods used in this paper can be transplanted to any other analogous company. From the company’s product manuals, there are 4 series of internal meshing gear hydraulic motors and their details are shown in TABLE 5.
Input(kW) 0.5MPa
3.5MPa
TCM 3*12.5-MR1
12.5
24.4
24
0.5
1.8
TCM 3*16-MR1
16
31
30.6
0.7
2.3
TCM 3*20-MR1
20
39.4
38.7
0.9
2.9
TCM 3*25-MR1
25
48.6
48
1.1
3.4
TABLE 5. DETAILS FOR INTERNAL MESHING GEAR Type Gear Screw Plunger
The nominal pressures for hydraulic transmission system standard system JB824-66 can be divided into 5 classes 00.25MPa (Low-pressure), 0.25 - 7.9MPa (Middle pressure),7.915.7MPa (Upper-middle pressure),15.7 - 31MPa (High pressure) and the pressure exceed 31MPa is ultra-high pressure. From the calculations in 2.3, we can know that the system pressure in HESA is about 1.4MPa, so the system pressure in HESA belongs to Middle pressure. According to applied characteristics of HESA, hydraulic motor should satisfy the requirement of high efficiency, small volume and have large variation range. Hence, the gear type motor is the best type. There are 2 kinds of gear type motor: internal meshing gear and external meshing gear. In comparison with external meshing gear motor, internal meshing gear motor has compacter structure and pumping rate is wider, so this paper chooses internal meshing gear hydraulic motor (as shown in Figure 10) as the application object in HESA.
Efficiency High Low Middle
Speed High Middle Low
Torque Small Medium Large
Volume Small Medium Large
Displacement Middle Low High
By comparing Table 3 and Table 5, the most corresponding series is TCM 3, whose displacement ranging from 24L/min to 48L/min. The model designation is shown in Figure 11, and details for the series 3 is shown in Table 6. TABLE 6. DETEAL PARAMETERS FOR SERIES 3 Type TCM 2 TCM 3 TCM 4 TCM 5
Nominal pressure
Maximum pressure
Nominal speed
17.5MPa
21MPa
1800r/min
Displacement 10-20L/min 24-48L/min 62-96L/min 112-230L/min
FIGURE 11. MODEL DESIGNATION Known from equation (11), energy harvesting potential for the bus is ranging 200W - 2kW. An assumption is made that the maximum energy harvesting potential is 2kW and the efficiency of the HESA is about 50%, so the value of the reclaimed power approximately equal to 1kW. By comparing values in Table 3 and Table 6, the final model can be determined as TCM 3-*20-MR 1. As for the mounting method and hydraulic fluid kind, they should be decided by specific situation. The permissible viscosity range of the hydraulic fluid to be used is 300 to15 mm2/s. However, it is advisable to use a hydraulic fluid with a viscosity of around 30 mm2/s. This paper mainly focuses on mechanical parameters of the hydraulic motor, so the influences of hydraulic fluid won’t be considered in this paper.
FIG10. INTERNAL MESHING GEAR HYDRAULIC MOTOR
3.2 The parameter settings of the hydraulic motor Considering that the dimensions and parameters of hydraulic motor from different companies differ from each other, a specific company should be chosen to make further researches according to its product manual. This paper chooses a Japan company as the target product source, this company as a supplier of an intelligent fluid power system, has been engaged in three
6
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
4. SIMULATION
4.1Simulation Modeling in AMESim The software AMESim is the acronym for Advanced Modeling Environment for Performing Simulations of Engineering Systems which offers a complete 1D simulation suite to model and analyze multi-domain, intelligent systems and to predict their multi- disciplinary performance. The components of the model are described by analytical models representing hydraulic, pneumatic, electric or mechanical behavior of the system. As known that ,the LMS Imagine. Lab software offers an extensive set of application specific solutions which comprise a dedicated set of application libraries and focus on delivering simulation capabilities to assess the behavior of specific subsystems. The current portfolio includes solutions for internal combustion engines, transmissions, thermal management systems, vehicle systems dynamics, fluid systems, aircraft ground loads, flight controls, and electrical systems. To verify the methods and steps described above,set a quarter car model for the target tour bus with HESA in AMESim(as shown in Fig 12). In this model, HESA replaces traditional absorber.The parameters of the suspension are same with traditional suspension(Table 1), parameters for HESA are showed in Table 7.
FIGURE 12. QURATER CAR MODEL WITH HESA
4.2. Simulation Tests As for the target tour bus, the fickle stimulations are road class and its running speed. Hence, simulations should be separately done by controling a single variable for the road classes and running speeds. Because of the main vulnerable dependent variable is shaft speed in the different stimulations, so shaft speed is set as the dependent variable to verify the methods and setps adopt in this paper is right. The simulation results for different running speeds in the target road class is shown in Figure 13. The simulation results for different road classes under the target speed of 70km/h is shown in Figure 14.
TABLE 7. PARAMETERS OF THE HESA Parameter 𝜈 𝑙 𝑑 𝜌 𝜍𝑖
Value 2.1×10−6 𝑚2 /𝑠 2m 0.016 m/ (5/8 inch) 0.802×103 𝑘𝑔/𝑚3 0.13
𝑘1
3×108
𝑃𝐻0
500,000 𝑃𝑎
𝑉𝐻0
0.16×10−3 𝑚3
𝑃𝐿0
200,000 𝑃𝑎
𝑉𝐿0
0.32×10−3 𝑚3
𝑃𝑖
500,000 𝑃𝑎
𝜂𝑣
0.92
𝜂𝑚
0.95
𝑘𝑒 (or 𝑘𝑡 ) 𝐽𝑔
0.242 560×10−7 𝑘𝑔 ∙ 𝑚2
𝑅𝑖 𝑛𝑔
3.9Ω 4.3
Nomenclature Fluid kinematic viscosity Pipe length Pipe diameter Fluid density Tee coupling resistance coefficient Check valve resistance coefficient Gas pressure of high-pressure accumulator at State 0 Gas volume of high-pressure accumulator at State 0 Gas pressure of low-pressure accumulator at State 0 Gas volume of low-pressure accumulator at State 0 Initial environmental pressure in HESA Volume efficiency of the hydraulic motor Mechanical efficiency of the hydraulic motor Piston diameter Rotation inertia of the generator Internal resistance Gear ratio of the gear head
FIGURE 13. SHAFT SPEEDS IN DIFFERENT RUNNING SPEED FOR ROAD CLASS C
FIGURE 14. SHAFT SPEED FOR DIFFERENT ROAD CLASSES UNDER 70KM/H
7
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
As shown in Figure 13, the shaft speeds of hydraulic motor in different running speed for road class C are ranging from about 1000r/min to 3000r/min and have a positive relationship with speed. Most of shaft speeds are under the acceptable bound of the hydraulic motor. It has a good speed stability under 70km/h, gradually worsening on both sides of the the target speed, but wouldn’t affect its suspension characters. As shown in Figure 14, shaft speeds of the hydraulic motor in different road classes under 70km/h are ranging from about 100r/min to 8000r/min and have a positive relationship with road conditions. The shaft speed of the motor under 70km/h in road classes C stables around its nominal speed and hold the best working state.
Training Program in Wuhan University of Technology (Project no. 20161049707012),and Independent Innovation Fund for Undergraduate Student in Wuhan University of Technology(Project No. 2017-QC-A1-01). REFERENCES [1] Wang, J. J., Penamalli, G. P., & Zuo, L. Electromagnetic energy harvesting from train induced railway track vibrations. Proceedings of 2012 8th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, MESA 2012, 11787, 29–34. [2] Zuo, Lei, et al. "High-efficiency energy generator for harnessing mechanical vibration power." U.S. Patent Application 13/447,908. [3] Liang, X., & Zhao, J. “Research on recycling vibration energy of shock absorber,” International Journal of Vehicle Design, vol. 68, no. 1-3, pp. 201-220, 2015. Research on recycling vibration energy of shock absorber, 68. [4] Karnopp, D. (1989). Permanent Magnet Linear Motors Used as Variable Mechanical Dampers for Vehicle Suspensions. Vehicle System Dynamics, 18(4), 187–200. [5] SUDA, Y., & SHIIBA, T. A New Hybrid Suspension System with Active Control and Energy Regeneration. Vehicle System Dynamics, 25(sup1), 641–654. [6] Tang, X., Lin, T., & Zuo, L. Design and optimization of a tubular linear electromagnetic vibration energy harvester. IEEE/ASME Transactions on Mechatronics, 19(2), 615–622. [7] Chen Shian, HE Ren, LU Senlin. “NEW RECLAIMING ENERGY SUSPENSION AND ITS WORKING PRINCIPLE”, Chinese Journal of Mechanical Engineering. 2007.11, Vol.13 No.11, pp.177-182. [8] Weeks, D. A., Bresie, D. A., Beno, J. H., & Guenin, A. M. (1999). The Design of an Electromagnetic Linear Actuator for an Active Suspension. SAE International. [9] Nakano, K., Suda, Y., & Nakadai, S. (2003). Selfpowered active vibration control using a single electric actuator. Journal of Sound and Vibration, 260(2), 213–235. [10] Fodor, M. G., & Redfield, R. (1993). Variable linear transmission for regenerative damping in vehicle suspension control. Vehicle System Dynamics, 22(1), 1–20. [11] Zhang, H., Guo, X., Xu, L., Hu, S., & Fang, Z. (2014). Parameters analysis of hydraulic-electrical energy regenerative absorber on suspension performance. Advances in Mechanical Engineering, 2014. [12] Zhang H., Guo X., Xu. L and Zhang J. “Simulation and Test for Hydraulic Electromagnetic Energy-Regenerative Shock Absorber,” Transactions of the Chinese Society of Agricultural Engineering.30(2):3846,2014. [13] Fang Z., Guo X., Xu L., and Zhang H. “An Optimal Algorithm for Energy Recovery of Hydraulic Electromagnetic Energy-Regenerative Shock Absorber,” Appl. Math. Inf. Sci. 7(6):2207-2214, 2013. [14] Fang, Z., Guo, X., Xu, L., & Zhang, H. (2013). Experimental study of damping and energy regeneration characteristics of a hydraulic electromagnetic shock absorber. Advances in Mechanical Engineering, 2013.
CONCLUSIONS The energy conversion from hydraulic energy to mechanical energy mainly depends on the hydraulic motor between the two accumulators. Hence, the dimension match and parameter settings of the hydraulic motor for the HESA is of great importance for efficiency of the whole system. The methods and steps for the dimension matching and parameter settings of the hydraulic motor for hydraulic-electromagnetic energy-regenerative shock absorber have been introduced and verified in this paper. Therefore, the theory of the matching progress can guide the future precisely design of an HESA. The following conclusions can be drawn from this study: (1) The hydraulic motor should be chosen according the suspension characters and its typical working conditions. In other words, researches about its dynamic characters and the main working speed and road classes for the target ground vehicle should be clarified. (2) After figuring out the dynamic characters and main working conditions of the target vehicle, the manufacturer of hydraulic motor should be determined by its main products, then indexing from its complex product manuals according to the relevance dynamic characters and the main working conditions analyzed in step 1. What should be researched at the same time is the model designation method of the manufacturer to find the final model expediently. (3) The shaft speeds of hydraulic motor have a positive relationship with the speed and road class. The selected motor can hold the best working state in its main working conditions for it matches with the hydraulic conditions and the parameters of the accumulators. The hydraulic motor mainly influences the energy harvesting efficiency, and the suspension dynamics is mainly depended by the load set in the generation unit. ACKNOWLEDGMENTS The authors gratefully acknowledge the Hubei Key Laboratory of Advanced Technology for Automotive Components, Hubei Collaborative Innovation Centre for Automotive Components Technology, and the National Natural Science Foundation of China by 2016 (Project no.51675391) , National College Students Innovation and Entrepreneurship
8
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use
[15] Guo, S., Liu, Y., Xu, L., Guo, X., & Zuo, L. (2016). Performance evaluation and parameter sensitivity of energyharvesting shock absorbers on different vehicles, 3114(April). [16] Sijing Guo, Lin Xu, Yilun Liu, Xuexun Guo, Lei Zuo*. “Modeling, Experiments, and Parameter Sensitivity Analysis of Hydraulic Electromagnetic Shock Absorber”, ASME 2016 International Design Engineering Technical Conferences. V003T01A032.August 21, 2016, DETC2016-60390. [17] Xu, L., Liu, Y., Guo, S., Guo, X., & Zuo, L. (2016). Detc2015-46916 Damping Characteristics of a Hydraulic Electric Rectifier Shock, 1–10. [18] Guo, S., Chen, Z., Guo, X., Zhou, Q. et al., "Vehicle Interconnected Suspension System based on Hydraulic Electromagnetic Energy Harvest: Design, Modeling and Simulation Tests," SAE Technical Paper 2014-01-2299, 2014, [19] Peng, M., Guo, X., Zou, J., & Zhang, C. (2017). Simulation Study on Vehicle Road Performance with Hydraulic Electromagnetic Energy-Regenerative Shock Absorber Hydraulic Electromagnetic Energy-Regenerative. SAE Technical Paper 2016-01-1550, 2016.
[20] Zhou, Q., Guo, X., Xu, L., Wang, G., & Zhang, J. (2015). Simulation based Evaluation of the Electro-Hydraulic Energy-Harvesting Suspension (EHEHS) for Off-Highway Vehicles, (April). [21] Mi, J., Xu, L., & Guo, S. Suspension Performance and Energy Harvesting Property Study of a Novel Railway Vehicle Bogie with The Hydraulic- Electromagnetic EnergyRegenerative Shock Absorber Electromagnetic EnergyRegenerative Shock Absorber for Railway Bogie. SAE Technical Paper 2017011483,2017. [22] REN Zunsong., LIU Zhiming. Vibration and Frequency Domain Characteristics of High Speed EMU. JOURNAL OF MECHANICAL ENGINEERING. 2013,49(16): 1-7. [23] Zuo, L., & Zhang, P.-S. (2013). Energy Harvesting, Ride Comfort, and Road Handling of Regenerative Vehicle Suspensions. Journal of Vibration and Acoustics, 135(1), 011002.
9
Copyright © 2017 ASME
Downloaded From: http://proceedings.asmedigitalcollection.asme.org/ on 12/26/2017 Terms of Use: http://www.asme.org/about-asme/terms-of-use