Weighted Least-Squares Design of Recursive Allpass Filters. Sunder S. Kidambi. Abstract-In this paper, a method for the design of alllpass filters is described.
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 44, NO. 6, JUNE 1996
,
1553
Weighted Least-Squares Design of Recursive Allpass Filters
I
Sunder S. Kidambi
Abstract-In this paper, a method for the design of alllpass filters is described. In this method, an error reflecting the difference between the desired phase response and the phase response of the practical allpass filter is formulated in a quadratic form. The coefficients arc: obtained hy solving a system of linear equations involving the sum of a Toeplitz and an Hankel matrix.
I. INTRODUCTION
-10
-5
0
5 10 15 SIGNAL-TO-NOISE RATIO [dB]
20
25
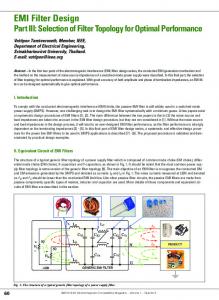
Fig. 5. UMSE curves of four IF estimators: (1) Spectrogram peak, (2) peak of the PWVD; (3) the X-PWVD iterative scheme; (4) least-squares polynomial fit to the unwrapped phase (LS-UP). The signal used for evaluation is a quadratic FM corrupted by WGN with N = 129 samples.
constructed a statistically efficient IF estimator of quadratic and cubic FM signals at low signal-to-noise ratios. REFERENCES B. Boashash, “Interpreting and estimating the instantaneous frequency of a signal-Part 11: Algorithms,” Proc. IEEE, vol. 80, pp. 539-569, Apr. 1992. B. Boashash and P. J. O’Shea, “Use of the cross Wigner-Ville distribution for instantaneous frequency estimation,” IEEE Truns. Signal Processing, vol. 41, no. 3, pp. 1439-1445, Mar. 1993. __ , “Polynomial Wigner-Ville distributions and their relationsip to time-varying higher order spectra,” IEEE Truns. Signal Processing, vol. 42, no. 1, pp. 216-220, Jan. 1994. B. Boashash and B. Ristic, “Application of cumulant TVHOS to the analysis of composite FM signals in multiplicative and additive noise,” in F. Luk, Ed., Proc. SPIE, Adv. Signal Processing Algorithms, Architect., Implement., San Diego, CA, vol. 2027, July 1993, pp. 245-255. __ . “A time-frequency perspective of higher-order spectra as a tool for nonstationary signal analysis,” In B. Boashash, E. J. Powers, and A. M. Zoubir, Eds., Higher Order Statistical Signal Processing. London, U.K.: Longman Cheshire, 1996 (in press). T. A. C. M. Claasen and W. F. G. Mechklenbrauker, “The Wigner distribution-P. I,” Phillips J. Res., vol. 35, pp, 217-250, 1980. P. M. Djuric and S . M. Kay, “Parameter estimation of chirp signals,” IEEE Trans. Acoust., Speech, Signal Processing, vol. 38, no. 12, pp. 2118-2126, Dec. 1990. S. Peleg and B. Porat, “Estimation and classification of polynomial phase signals,” IEEE Trans. Infiorm. Theory, vol. 37, no. 2, pp. 422429, Mar. 1991. B. Ristic and B. Boashash, “Use of cross polynomial Wigner-Ville distribution for instantaneous frequency estimation of nonlinear FM signals,” in Proc. IEEE-SP Int. Symp. Time-Frequency Time-Scale Anal., Philadelphia, PA, Oct. 1994, pp. 252-255. S. Tretter, “Estimating the frequency of a noisy sinusoid,” IEEE Trans. Inform. Theoty, vol. IT-31, pp. 832-835, 1985.
Allpass filters have been used in many :signal processing applications which include notch filtering, complementary filter banks, multirate filtering and group-delay equalization [ 11. Consequently, several design techniques have been propos’ed [2]-[11 J In [3], two algorithms for the design of allpass digital filters are presented. The first technique is based on a linear programming (LP) approach, and the second is based on a gradient search for those quadratic factors of the allpass transfer function, that lead to a locally optimal approximation of the desired phase function in the least-squares sense. Both these techniques, however, are computationally expensive. Using the LP method, advanced in [4], one can design stable allpass filters by imposing the minimum-phase condition on the denominator polynomial of the allpass transfer function. The LP technique, however, requires a large memory space and considerable computing time. In [5], the method of designing allpass filters using the Chebyshev criterion, in which nonlinear constraints in a nonlinear programming problem are linearized, is also based on L1’ techniques. In 161, the pth error criterion is minimized for progressively increasing values of p through the use of nonlinear optimization techniques. In [7], a generalized RemCz exchange algorithm has been used to design recursive filters. Both these methods mandate a good starting point and have slow convergence. The shortcomings of either extensive computational effort or the need for a goodl initial solution or both exist in the methods presented in [SI. Recently in [9], a least-squares phase error criterion has been used in the design of allpass filters. In this method, an error reflecting the difference between the phase response of the allpass filter and the desired phase response is formulated. ’The resulting system of equations is solved by using the method of pseudoinverse. The eigenfilter approach has been used in the design of allpass filters in [lo] and 1111, independently. The eigenfilter approach is based on formulating an objective function in a quadratic form and obtaining the solution vector as the eigenvector, corresponding to the smallest eigenvalue of a real, symmetric, and positive-definite matrix. This method entails an iterative inverse power algorithm in which a system of linear equations is solved in each iteration until the algorithm converges. In this paper, we propose a method which can be used to design an allpass filter that has a least-squares or an equinpple phase-error Manuscript received March 1, 1993; revised December 6, 1995. A preliminary version of this paper appeared in the Proc. IEEE Int. Symp. Circuits and Systems, London, U.K., May 1994. The asxociate editor coordinating the review of this paper and approving it for publication was Dr. Robert A. Gabel. The author is with Analog Devices Inc., Ray Stata Technology Center, Wilmington, MA 01887-3462 USA. Publisher Item Identifier S 1053-587X(96)03956-6.
1053-587X/96$05,00 0 1996 IEEE
1554
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 44, NO. 6, JUNE 1996
response. The method is based on formulating a weighted error reflecting the difference between the desired phase response and the phase response of the practical allpass filter in a quadratic form. The frequency-dependent weighting function that yields a least-squares or an equiripple solution is determined in an iterative manner. The filter coefficients are obtained by solving a system of linear equations which involves a Toeplitz-plus-Hankel matrix. The solution of such ) In order to a system of equations involves only U ( A T 2 complexity. demonstrate the efficacy of our design method, we present several examples.
The minimization of E will yield the required allpass filter coefficients. Consequently, by setting d E / d a , = 0, for i = 1: 2, . . . , N , we get a system of linear equations given by Qa = d, where
FORMULATION AND MINIMIZATION 11. ERRORFUNCTION
.If
A(z)=
-
+ alz-("-l)
(10
+
+ aqz-(-v--2)
' ' '
+ a:\-
(8)
k=l
I\.
d=
I U ( W ~ sin ) [pd(~k)]s1(uk).
-
(9)
k=l
It can be noted that Q is a real, symmetric, and positive-definite matrix. Thus a unique solution is guaranteed. The elements of Q are given by
The transfer function of a recursive allpass filter can be written as -N
u~(wL)sI(~~)sT(w~~)
Q=
11 Q(l7. 1 7 1 )
=
?v(&k)
sin [ p d ( ~ k ) n w ~ sin ] [pd(wk) - mwk]
i=1
+ a 1 z - l + a22-2 + + a;yz-.\" '
\f
= 0.3
U'(Lcik)
cos [ ( n- m ) 4
h=l 3I
E;'=, a,zY7'.
where a? are real coefficients and D ( 2 ) = Consequently, the phase response O 4 ( U ) of as en(&) = - 1vw
+ 2 tan-I
- 0.5
A(eJw j can be written
1 +ai
W(Wk)
+
cos [ ( n m)w,k - 2 P d ( U k ) ]
k=l
= T ( n . 7n) +IT(,%. nL)
(10)
C(J)
If O o ( w ) is the desired response, then an error reflecting the difference between this and O A ( W ) can be written as
The minimization of El involves nonlinear programming techniques which depend upon good initial solutions. Such optimization techniques can be avoided by rewriting (2) as
As can be seen from the above expressions, Q is the sum of a symmetric Toeplitz matrix and an Hankel matrix. Thus the system of linear equations can be written as (T H)a = d.Such a system of linear equations can be solved by using computationally efficient algorithms involving only O(iV2) complexity [13], [14] as opposed to solving Qa = d, which involves O ( N 3 )complexity [15]. The error given by (7) can be made to correspond to the true leastsquares one by using an iterative procedure in which the weighting function in the 7n th iteration is defined as
+
u!l,i (W k ) =
(4)
ID, 1(eJWk) 1 --2 -
(11)
for k = 1. 2. ' ' _nil [9]. Therefore, an iterative algorithm to design allpass filters that are optimal in a least-squares sense is summarized in Algorithm 1. Algorithm 1: Set u ~ ( - . ~=) 1 for k = 1. 2. . . . , 119. Obtain the filter coefficients by solving a system of linear equations given by ( T Hja = d. Set ap = a and m = 1. Evaluate U ~ ~ (=~lD7n-1(~Jdk)l-2 A ) f o r k = 1. 2. . . . , M . Solve (T H)a = d. if norm (a - a,) < lop5, stop. Else, set ap = a, rn = TIL 1 and go to Step 2. ~
If the phase response of the allpass filter is required to approximate we can replace 0 4 (w)by O D ( U J ) in the above expression. Therefore, ~ ' D ( J )then ,
+
+
where
+
111. EQUIRIPPLE DESIGNOF ALLPASSFILTERS
where sL(w) =
sin [pd(w')]c(w) - cos [ P ~ ( W ) ] S ( W )
U'( d k ) is a frequency-dependent weighting function, and IT!! is the number points at which the desired phase response is sampled.
In many applications, it may be necessary to minimize the peak phase error. To achieve such a design, minimax approximation techniques have to be employed. A good altemative to minimax design method is the equiripple design method which yields filters that are close to those designed using minimax techniques. The motivation to design filters with an equiripple phase response is that weighted least-squares techniques can be easily adopted to design such filters. In the previous section, the weighting function that yields filters that
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 44, NO. 6, JUNE 1996
1555
0.01E
0.01 0.005
C -0.005 h
3 v a
-0.01
a,
-0.01 5 -0.02 -0.025
-0.03
0.5
1
1.5
w Fig. 1,
3
2.5
2
in rad/sec
Phase-error variation of the least-squares optimal design (solid line) and the equiripple design (dashed line) of the Hilbert transformer.
are optimal in a least-squares sense has been obtained in an iterative manner. In a similar fashion, equiripple filters can be designed by using the appropriate frequency-dependent weighting function that yields an equiripple phase response. Toward this end, we use the iterative technique presented in [ 161 to determine the appropriate weighting function. Let the weighting function at the (vi 1)th iteration be given by
+
'[~J,+I
!U)
= 7Utn(W)!3m(d)
(12)
where the updating function, / j m (d),is a function of the envelope of the phase error. Here, phase error is defined as eo(LJ)
= 61o(w) - O n ( w ) .
(13)
As a first step toward obtaining the envelope function, we identify the valley frequencies. The valley frequencies are the frequencies at which le0 ( d )I has a local minimum. We will refer to these frequencies are the frequencies as N , (for i = 2, 3: . . . , U ) where o1and at the band edges. The maximum values of [eo( w ) I between pairs of consecutive ai's are obtained as yz = niax
{ / e g ( ~ ~ k ) / } for
a,






































![Robust weighted averaging [of biomedical signals] - IEEE Xplore](https://m.moam.info/img/260x300/robust-weighted-averaging-of-biomedical-signals-ie_5c9ebdb4097c47e77e8b4626.jpg)