Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '09)
About of PI Fuzzy Controller in DC to DC Power Converters JENICA ILEANA CORCAU Division Avionics University of Craiova, Faculty of Electrotechnics Blv. Decebal, nr. 107, Craiova, Dolj ROMANIA
[email protected],
[email protected] ELEONOR STOENESCU University of Craiova, Faculty of Electrotechnics Blv. Decebal, nr. 107, Craiova, Dolj ROMANIA
[email protected] TEODOR LUCIAN GRIGORIE Division Avionics University of Craiova, Faculty of Electrotechnics Blv. Decebal, nr. 107, Craiova, Dolj ROMANIA
[email protected] Abstract: - In this paper is presented a fuzzy PI controller. Fuzzy PI controller and principles their performing is considered in large applications. Based on a qualitative descripion of the system to be controlled, fuzzy controller is capable of good performances when a mathematical description is not available. The PI like controller presented is general and can be applied to any dc to dc power converters topologies. Simulation results of Buck converter show control potentialities. Key-Words: - fuzzy logic control (FLC), PI-like FLC, dc to dc converters. is widely used to solve problems under uncertain and vague environments, with high nonlinearities [3]. With Fuzzy Logic Control, the design concept is totally different. This control technique relies on the human capacity to understand the system’s behavior which determines how effective linguistic rules of the Fuzzy Controllers are and is based on qualitative control rules. The PI like FLC is, however, known to give poor performance in starting response due to the internal integrating operation. To improve the starting response of an PI-like FLC is not easy, especially to reduce the high starting inductor current, and to retain the good steady state performance at the same time. A fuzzy PI controller is presented, which can provide improved performance such as a reduction of the high starting current and an well damped output voltage for dc to dc converters. So, a series of papers have considered the control of dc to dc converters based on output feedback linearization theory, sliding-mode control approach and fuzzy control technique.
1 Introduction Fuzzy control has emerged of the most active and promising control areas, especially because it can control highly nonliner, time – variant and ill-defined systems [1]. The dc to dc power converters are power electronic systems that convert one level of electrical voltage into another level switching action. The output voltage is controlled by adjusting the ON time of the power switch , which in turn ajusts the with of a voltage pulse at the output. This is known as pulse width modulator PWM control [2]. Most of the modeling in Power Electronics is intended to convert the non-linear and time varying model to an ideal or non-ideal switch model. A power electronics system, in general, has a complex non-linear model with a parameter variation problem and the control needs to be very fast which is crucial to the performance of Power Converters is choice of control methods. In contrast with traditional linear and nonlinear control theory, a FLC is not based on a mathematical model and
ISSN: 1790-5109
208
ISBN: 978-960-474-051-2
Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '09)
∆u(k) = K(∆e(k) +
2 Basic of fuzzy logic controllers
e(k))
(3)
Where ∆u(k)=(u(k)-u(k-1))/T, ∆e(k)=(e(k)-e(k-1))/T, T is the sampling period, k is the step. has a From [5] it is obvious that the time constant relation to the change in error. Therefore we can modify the equation (3) for a fuzzy PI controller ∆u(k) = ( e(k) + e(k)) (4)
The basic scheme of a fuzzy logic controller is shown in figure 1 and comprises four principal components: a fuzzyfication interface, which converts input data into suitable linguistic values; a knowledge base, which consists of a data base with the necessary linguistic definitions and the control rule set; a decision-making logic which, simulating a human decision process, infers the fuzzy control action from the knowledge of the control rules and linguistic variable definitions; a defuzzification interface which yields non-fuzzy control action from an inferred fuzzy control action [2].
In the next step it is necessary to map the rule base to discrete state space ∆e(k), e(k). We define the scale factor M for the universe range M>0. This scale factor sets the universe range for the error and the first difference. We extended the equation (4) and get [5] ∆u(k) = ( e(k) + e(k)). (5)
K now ledge B ase
Fu zzyficatio n Interface
The input or output value is multiplied by a constant which indicates a real range of the universe, figure 2. If the universe range is multiplied by a coefficient of 5 before fuzzification, the real range of the universe is [-0,2, 0,2]. For an coefficient of 0,1 the real range of the universe is [-10, 10]. It’s evident that there’s no conflict with the commonest and this procedure leads to the significant simplicity of the fuzzy controller design as will be demonstrated [5]. Fuzzy sets must be defined for each inputs (error and integral error) and output variable. As shown in figure 2 seven fuzzy subsets PB (Positive Big), PM (Positive Medium), PS (Positive Small), ZE (Zero), NS (Negative Small), NM (Negative Medium), NB (Negative Big) have been chosen for input variables. For the output variable seven fuzzy subsets have been used (PB, PM, PS, ZE, NS, NM, NB), in order to smooth the control action. As shown in figure 2, triangular and trapezoidal shapes have been adopted for the membership functions. The value of each input and output variable is normalized in [-1,1] by using suitable scale factors. Fuzzy control rules are obtained from the analysis of the system behavior. In their formulation it must be considered that using different control laws depending on the operating conditions can greatly improve the converter performances in terms of dynamic response and robustness [6].
D efuzzyfication Interface
D ecision M aking L ogic
Fu zzy
F uzzy
C ontrolled S ystem
Fig 1. Basic configuration of FLC The fuzzy control systems are based on expert knowledge that converts the human linguistic concepts into an automatic control strategy without any complicated mathematical model. Fuzzy logic controller has been proven to be superior to the conventional PI controller in that it naturally provides the ability to deal with highly nonlinear, timevariant and ill defined systems where the mathematical models are difficult to be obtained or the control variable are too hard measure. The equation for a conventional PI-controller is [4], [8] u = KP e + KI , (1) where KP and KI are the proportional and the integral gain coefficients. When we derive (1) we get = KP + KI e (2) The PI-like FLC consists of a rule of the form Ri : If ei is Ai and ei is Bi then ui is Ci Where Ai and Bi (antecedent), Ci (consequent), are fuzzy variables characterized by fuzzy membership function. In this case, to obtain the value of the control output variable u(k), the change of control output u(k) is added to u(k-1). It is to be stressed here that this addition takes place outside the PI-like FLC, and is not reflected in the rules themselves. If we translate the equation (2) to a discrete form we get the equation for action value change of the discrete PI controller
ISSN: 1790-5109
Fig. 2 The membership functions for inputs and output We apply fuzzification to input variables and after defuzzification we get the equation
209
ISBN: 978-960-474-051-2
Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '09)
∆u(k) =
D {F{
e(k) +
e(k)}}
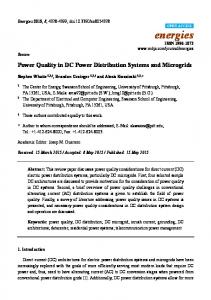
Control operation was verified by simulation using the Matlab/Simulink software. The parameters of Buck converters are: L=100 H, C=200 F, R0=4 , =20V, V0= 15V, [2]. The simulations results are for start up of the Buck converter from the zero initial state. The membership functions in figure 4 are used. The and , parameters, the denormalization factors, can be found in [4]. Simulation results are obtained with a supply voltage change from 20V to 15V and for load resistance change from 4 la 2,5 . Figure 5 give a graphical representation in table 1, i.e. the surface control and in figure 6 is presented the structure of the fuzzy PI controller realized in Matlab/Simulink. In figure 7 is presented graphical construction of the control signal in a fuzzy PI controller; generated in the Matlab Fuzzy Logic Toolbox. In figure 8 is presented the structure of the system realized in Matlab/Simulink and the simulation results obtained using PI fuzzy controller are presented in figure 9.
(6)
where F is an operation for fuzzification and D for defuzzification. For u(k) results ∆u(k)= = D{F{ e(k) + e(k)}} ( 7) The control signal generated by the fuzzy PI controller in step k is: u(k) = D{F{ e(k) + e(k)}}+u(k-1) (8) A realization of the fuzzy PI controller is presented in figure 2.
Fig. 3 Structure of the fuzzy PI The FLC contains a number of sets of parameters that can be altered to modify the controller performance such as: - the scaling factor for each variable; - the fuzzy representation the meaning of linguistic value; - the if-then rules. A non-adaptive FLC is one in which these parameters do not change once the controller is being used on-line. If any of these parameters are altered on-line, the controller will be called an adaptive FLC. If different types of FLCs are used in the same controlled process according to process over time, a variable structure FLC can be obtained. In table 1 is presented a rule base table for PI-like FLC.
Fig. 4 The membership functions for inputs and output
Table 1 The base rule for a PI-like FLC to calculate ( u) ∆e\e NB NM NS Z PS PM PB NB PB PB PB PB PM PS Z NM PB PB PB PM PS Z NS NS PB PB PM PS Z NS NM Z PB PM PS Z NS NM NB PS PM PS Z NS NM NB NB PM PS Z NS NM NB NB NB PB Z NS NM NB NB NB NB
output
0.5
0
-0.5
1
The fuzzyfication process is done through fuzzy triangular, while the Mamdani's min fuzzy implication is used together with the max-min compositional rule of inference methods; the Center of Area method was selected for the defuzzification process.
0.5
20 10
0 0
-0.5 integralerror
-10 -1
-20
error
Fig. 5 The surface control of controller
3 Simulation results
ISSN: 1790-5109
210
ISBN: 978-960-474-051-2
Proceedings of the 8th WSEAS Int. Conf. on ARTIFICIAL INTELLIGENCE, KNOWLEDGE ENGINEERING & DATA BASES (AIKED '09)
e r r o r
It is should be noted that the integrator in the fuzzy PI controller reduces the steady state error but, fuzzy PI controllers generally give inevitable overshoot in output voltage and high initial inductor current when one tries to reduce the rise time response. This is because of integral saturation.
c o n t r o l7
( 7 )
( m a m d a n i)
4 9
r u le s
o u tp u t
in t e g r a l
r r o r
( 7 )
( 7 )
e
S y s te m
c o n t r o l7 :
2
in p u t s ,
1
o u tp u ts ,
4 9
r u le s
Fig. 6 The structure of the controller
4 Conclusion In this paper is presented the basic structure of PI-like FLC. The new structure of an PI fuzzy controller is investigated, which can provide improved performance such as reduction of the high starting current and well damped output voltage in fuzzy control for dc to dc Buck converters.
References: [1]. George Kopasakis. Fuzzy current mode control and stability analysis. AIAA -2003, pg. 1-18, June 2000; [2] Corcau J., Constantinache P. An adaptive current mode fuzzy logic controller for dc to dc converters. 6th International Conference Electromechanical and power systems, Octomber 4-6, 2007, Chişinău, Rep. Moldova, Analele Universitatii din Craiova, vol. I, pag. 275-280, ISSN 1842-4805; [3]. Corcau J., Dinca L. Performance improvement of dc to dc converters using the different slopes of embership functions on fuzzy logic control. ICNPAA-2008, Mathematical Problems in Engineering Aerospace and Science, June 25-27 2008; [4]. Abdullah I. Al. Odienat, Ayman A. Al-Lawama. The Advantages of PID fuzzy controllers over the conventional types. American Journal of applied Sciences 5(6), 2008, ISSN 1546-9239; [5]. Pivonka P. Analysis and design of fuzzy PID controller based on classical PID controllers approach, Physica-Verlag, 2000; [6]. Tomescu B. On the use of fuzzy logic to control paralleled dc-dc converters. Dissertation Virginia Polytechnic Institute and State University Blacksburg, Virginia, October, 2000; [7]. Mattavelli, P., Rossetto, L., Spiazzi, G., Tenti, P. General-purpose fuzzy controller for dc/dc converters, APEC, 1995; [8]. Edik Arakeljan, Mark Panko, Vasili Usenko. Comparative analysis of classical and fuzzy PID algorithms, Physica-Verlag, 2000.
Fig. 7. The rule view of the controller
Fig. 8. The block scheme realized in Simulink using PI
fuzzy controller 16 14 12 10
V0[V]
8 6 4 2 0 -2 -4
0
0.01
0.02
0.03
0.04
0.05 t[s]
0.06
0.03
0.04
0.05 t[s]
0.06
0.07
0.08
0.09
0.1
10 9 8 7
I[A]
6 5 4 3 2 1 0
0
0.01
0.02
0.07
0.08
0.09
0.1
Fig. 9 Simulation results of fuzzy PI controller
ISSN: 1790-5109
211
ISBN: 978-960-474-051-2