IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 21, NO. 3, AUGUST 2006
1131
An Adaptive Local Learning-Based Methodology for Voltage Regulation in Distribution Networks With Dispersed Generation Domenico Villacci, Member, IEEE, Gianluca Bontempi, Member, IEEE, and Alfredo Vaccaro, Member, IEEE
Abstract—This paper proposes a computational architecture for the voltage regulation of distribution networks equipped with dispersed generation systems (DGS). The architecture aims to find an effective solution of the optimal regulation problem by combining a conventional nonlinear programming algorithm with an adaptive local learning technique. The rationale for the approach is that a local learning algorithm can rapidly learn on the basis of a limited amount of historical observations the dependency between the current network state and the optimal asset allocation. This approach provides an approximate and fast alternative to an accurate but slow multiobjective optimization procedure. The experimental results obtained by simulating the regulation policy in the case of a medium-voltage network are very promising. Index Terms—Dispersed storage and generation, intelligent control, power distribution, voltage control.
I. INTRODUCTION
T
HE European Union energy policy, the national incentives, and the advent of deregulated energy markets are driving factors for the employment of dispersed generation systems (DGS), like wind photovoltaic and cogenerators systems [1], [2]. Additional motivations are cost reduction, improved efficiency, and reliability, which make DGS both competitive with traditional centralized generation systems and attractive for power utilities and customers [3], [4]. As a result, a significant growth of the number of DGSs connected to the electrical distribution systems is expected in the near future. In this perspective, it becomes crucial to integrate DGSs into existing lowand medium-voltage grids by containing the negative impact on network operations and control. It is indeed well known that the integration of DGSs into running distribution systems perturbs the power flows and the voltage conditions of customer and utility equipment by inducing a number of side effects (e.g., bidirectional power flows and increased fault current levels [1], [2]). This increases the complexity of controlling, protecting, and maintaining distribution systems that are typically designed to operate radially without any generation on the distribution Manuscript received August 10, 2005; revised February 9, 2006. Paper no. TPWRS-00498-2005. D. Villacci and A. Vaccaro are with the Power System Research Group, Dipartimento di Ingegneria, Università degli Studi del Sannio, Benevento, Italy (e-mail:
[email protected];
[email protected]). G. Bontempi is with the Machine Learning Group, Departement d’Informatique, Universite Libre de Bruxelles, Bruxelles, Belgium (e-mail:
[email protected]). Digital Object Identifier 10.1109/TPWRS.2006.876691
line or customer side [2], [5]. As a consequence, effective network voltage regulation [1], [5] is required in the two DGS operation modes: voltage following and voltage support. DGSs operating in a voltage following mode employ electric generators directly coupled to the electrical grid. In other terms, they inject real power at nearly constant power factor without performing any regulation of the system voltage [1], [6]. In this operation mode, the voltage levels at the injection nodes increase together with the DGS real power output. This aspect limits the power injected by DGS and, consequently, restricts their exploitation within the distribution system [1], [5]. DGSs operating in a voltage support mode rely on power electronic interfaces based on line or self-commutated devices (high power IGBTs, GTOs, and thrystors [6]). These interfaces are designed to provide a controllable source of reactive power and, once joined with suitable control architectures [7], [8] and communication systems, allow DGS to take an active role in voltage regulation [1], [4], [6], [9], [10]. However, if on one hand, the adoption of such a DGS increases the degrees of freedom in the identification of the optimal distribution system asset, on the other hand, it asks for a more expensive analysis. This is due to the uncertainty affecting the DGS power injection and to the need of coordinating the reactive power dispatchable DGS with traditional voltage regulating devices (line tap changing transformers, remotely controlled capacitor banks, and static Var compensators [11]). In order to address these needs, nonlinear programming approaches to optimal voltage regulation of distribution systems in the presence of DGS have been proposed [3], [4], [12], [13]. These techniques recommend the adoption of centralized control strategies that identify, for each network state, the optimal set points of the voltage regulating devices. This is obtained by minimizing a scalar cost function that is a linear combination of the control objectives (voltage profile flattening, power losses, reactive power cost minimization, etc.), in the presence of several constraints (reliability indexes, voltage stability limits, etc.). The main shortcoming of these approaches is the weighted cost function that is often not suitable to represent the multicriteria aspects of the problem [14], [15]. Also, weighting strategies suffer from the so-called convexity problem that, in some cases, does not allow the exhaustive exploration of the solution space [14]. To overcome these limitations, more accurate formalizations of the voltage regulation problem, based on vector cost functions, have been recently proposed in the literature [14], [16]. In this approach, the overall problem is treated as a constrained multiobjective optimization
0885-8950/$20.00 © 2006 IEEE
1132
problem and solved by standard nonlinear programming techniques, or more advanced solution methodologies (e.g., strength Pareto evolutionary algorithm [14] and modified fuzzy-based evolutionary algorithms [16]). Although these methodologies have proved their effectiveness and robustness, their online application demands a high computational cost, making difficult their integration into existing distribution management systems. As a consequence, the research in voltage regulation in the presence of DGS is now addressing the issue of making computation more efficient by avoiding accurate yet time-consuming algorithms [5], [17], [18]. This paper advocates the role of machine learning techniques [19] in dealing with the problem of an efficient and optimal centralized voltage control in distribution networks equipped with DGS. The rationale is that, in practical applications, optimization algorithms are often called to solve a multiobjective problem in configurations that are not too far from previously encountered ones. The idea is then to use intelligent techniques to “learn” from a database of past optimizations how to solve the voltage regulation problem. The learning machine then plays the role of an approximate and fast optimizer that is able to reduce significantly the computation (CPU) time by avoiding unnecessary calculations for similar network states. The proposed architecture is composed of the following modules: — a sequentially updated historical database that stores the most relevant operating configurations; — a supervised learning system that processes historical data in order to predict the optimal regulating devices asset on the basis of the current network state; — a supervisor process that detects non-optimal operating conditions and notifies the need of a more accurate solution of the voltage regulation problem; — a solution engine that a) solves, on demand of the supervisor process, the voltage regulation problem for the current network state by a conventional multiobjective optimization technique and b) updates the historical database as soon as new data samples are available. The supervised learning system adopted in this computational architecture is based on a local learning algorithm, called the lazy learning (LL) algorithm [20], [21]. The main feature of LL is that, unlike conventional nonlinear approaches (e.g., neural networks [21]), it does not build any global functional model of data. Instead, for each given network state (query point), LL obtains the prediction of the optimal regulating device asset by 1) selecting the most relevant samples from the historical database according to a distance metric and a linear leave-one-out
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 21, NO. 3, AUGUST 2006
criterion (PRESS) and 2) interpolating the selected points with a simple local approximator. The resulting learning-based control architecture is expected to be accurate, robust, and prompt. Accuracy should derive from the use of a powerful learning algorithm, which proved high generalization and adaptivity features in previous applications [21], [24]. Robustness should be guaranteed by a mechanism that relies on the precise state-of-the-art optimizer when the precision of the supervised learning system is not deemed to be sufficiently accurate. Finally, promptness derives from the fact that, once a sufficient number of data is stored, an optimal solution may be rapidly approximated by the learning system without having recourse to the slow optimization algorithm. In order to assess the proposed methodology, we present and discuss some simulation results obtained by applying the voltage regulation methodology to a real 71-bus medium-voltage network under stressed operation conditions. The outline of this paper is as follows: The formalization of the problem of optimal voltage regulation in the presence of DGS is given in Section II. Section III proposes an adaptive methodology based on a local learning method for the solution of the optimal regulating problem. Section IV contains the description of the simulations and the discussion of the results. Conclusions and future work are summarized in Section V. II. PROBLEM STATEMENT The aim of a voltage regulation process is to identify, for each network state , the asset of voltage regulating devices that minimizes an objective vector subject to a number of in. equality constraints This problem can be written as a multiobjective mathematical programming problem (1) where (2) denotes the voltage regulation devices asset; is the reDGS conactive power injected by the th nected to the distribution system and available for the regulais the vector of the reactive power injected by the th tion; capacitor bank; is the set point of the th flexible ac transmission system (FACTS); and is the tap position of the HV/MV line tap changing transformer. Note that the control vector takes value in the solution space , shown in (3) at the bottom of the page.
(3)
VILLACCI et al.: ADAPTIVE LOCAL LEARNING-BASED METHODOLOGY
1133
The problem constraints are summarized by the vector func. This function describes the constraints for a cortion rect system operation in terms of allowed voltage ranges for ) the networks nodes (i.e., power lines (i.e., and maximum allowable currents for the . The objective function, to be minimized, takes into account both technical and economic aspects and can be written either as a weighted sum of normalized design objectives
(4) where
are normalization terms or as a vector function
(5) Note that typical design objectives (to minimize) are as follows. — Active power losses:
(6) and are the total active power generated and where absorbed on the network. — Average voltage deviation:
(7) are the current and the desired voltage at where and the node , respectively, and is the number of nodes. — Maximum voltage deviation:
(8) — Reactive energy cost for the regulating period [4]:
given by
(9) where is the real energy price; and are the reactive energy imported from the HV grid and the and are the corresponding cost (in $ MVarh ; costs (in $ MVarh of the reactive energy injected by the dispatchable DGS and capacitor banks, respectively; and and are the reactive energy injected by the FACTS devices and the corresponding cost (in $ MVarh . Since the design objectives are competing, the voltage regulation problem has no unique solution, and a suitable trade-off between objectives has to be identified.
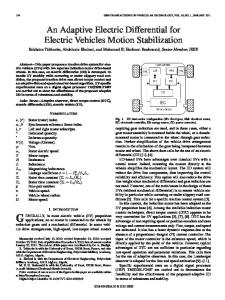
Fig. 1. Adaptive architecture for voltage regulation.
III. ADAPTIVE SOLUTION OF THE VOLTAGE REGULATION PROBLEM The solution of the voltage regulation problem is the solution of the multiobjective optimization programming problem described in (1). For a given network state, existing minimization approaches adopt numerical iterative search algorithms. In this case, the search of the solution is known to be extremely time consuming. This factor is critical if many DGS are present since we need frequent solutions of the voltage regulation problem in order to manage the uncertainty affecting the DGS power injections and to coordinate the dispatchable DGS with conventional regulating devices. We propose here an approach integrating advanced learning methods, adaptive features, and nonlinear programming techniques to address the need for a robust, fast, and accurate voltage regulation process. The proposed architecture (see Fig. 1) employs a database that stores the most relevant historical solutions of the voltage regulation problem in the form of input/output data samples (i.e., network states and the corresponding optimal regulating devices assets). These data may be used as the training set of a supervised learning system that aims to predict the optimal regulating devices asset for a given network state. The fitness of this solution is continuously monitored by a dedicated supervision process (see Fig. 2) that 1) analyzes the current voltage profile, 2) detects the occurrence of non-optimal network operating conditions (e.g., out of range voltage in some nodes, excessive power losses, improper voltages profile flatness, etc.), and 3) notifies the need for a more accurate solution of the voltage regulating problem. The accurate analysis is computed, on demand, by a dedicated solution engine that solves the multiobjective problem by a conventional numerical solution technique. The new computed so-
1134
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 21, NO. 3, AUGUST 2006
Fig. 3. Case study: a real 71-bus distribution network.
Fig. 2. Supervision process for voltage regulation.
lution, jointly with the corresponding network state, are stored in the database and used to update the knowledge base. The main modules of the architecture are sketched in the following sections. A. Supervised Learning System The goal of the supervised learning module is to learn on the basis of a finite number of past examples the set of (unknown) relations (10) where the input is the network state at time , the output is the th term of the solution vector (of size returned by a conventional multiobjective minimization procedure, and is the term, including modeling error, disturbances, and noise. Supervised learning [19] is the discipline that studies how to of an unknown function build an accurate estimator on the basis of observed data. In order to accomplish this task, a machine learning algorithm requires a collection of input/ , also known output observed pairs as the training set. If conventional assumptions of normality and whiteness are , the output prediction returned by the supervised made on is learning technique for a given input (11) The simplest form of supervised learning assumes linear dependencies (12)
where the vector of parameters is estimated by using conventional least-squares techniques. Recent research in machine learning and data mining proposed a set of powerful approxima[19]. The following section tors of nonlinear dependencies reviews the characteristics of the nonlinear local learning approach and the main motivations for its use in our architecture. Note that in our problem, the task of predicting a multivariate output boils down to a series of univariate learning tasks. Supervised Local Learning: The architecture proposed in this paper is based on the LL algorithm presented in [21] and [24]. This technique is an example of a lazy and local learning method. Lazy indicates that, once a dataset of historical examples is stored, any processing is deferred until an explicit request for a prediction is received. Local means that, when a query is done, the dataset is searched for examples falling in the neighborhood of the query point. Such examples are used for identifying a local model that is then evaluated in the query point to return a prediction. The local model is then discarded, and the procedure is repeated from scratch for subsequent queries. Although the LL approach is able to fit nonlinear dependencies, the local models that are used to perform each prediction are all linear ones. This allows to take advantage, on a local basis, of linear identification and validation techniques that are fast, reliable, and supported by plenty of theoretical results. The major appeal of LL is precisely its divide-and-conquer nature: LL reduces a complex and nonlinear modeling problem into a sequence of easily manageable local linear problems. The supervised learning module of our architecture is based on a LL algorithm that, on a query-by-query basis, adapts the number of neighbors to be used in the local modeling process. This algorithm proved to be successful in two international competitions [25], [26] and in a number of academic and industrial case studies, ranging from time-series prediction to data modeling and nonlinear control [24], [27]. is reOnce the prediction of the output for a given query quired, the LL algorithm executes the following steps [21], [23].
VILLACCI et al.: ADAPTIVE LOCAL LEARNING-BASED METHODOLOGY
1135
— It associates at each sample a dependent on the distance . weight and , where — It computes the matrices is a diagonal matrix having diagonal elements is the matrix built with the observed inputs, and is the vector made of the observed outputs. — It solves, using a number of neighbors of , a linear locally weighted regression problem (13) where is the parameter vector of the first-order polynomial used as a local approximator. — It returns the prediction by evaluating the model (13) in the query point (14) This algorithm requires an adequate selection of the number of neighbors of to be used in the local regression fit. In fact, it is well known in machine learning [19] that the number of neighbors plays a major role in the predictive accuracy of a local learning algorithm. This issue is addressed by solving in a recursive fashion the (13) [21]. The idea consists in starting from a minimum number of neighbors and recursively adding neighbors until the performance of the corresponding local approximation (estimated by leave-one-out) decays significantly or a maximum number of examples is reached. This technique makes possible to run in parallel the estimation of the parameters and the estimation of the prediction accuracy through the leave-one-out cross-validation measure returned by the PRESS statistic [28]
More details on the LL technique can be found in [20], [21], [24], and [25]. Also, a comparative analysis of LL and neurofuzzy inference systems for modeling is presented in [27]. B. Supervision Process The accuracy of the solution computed by the supervised learning system could worsen in presence of time varying phenomena affecting the distribution system operation, like unexpected loads variations, increase of DGS penetration, and network topology reconfiguration. The development of suitable tools able to improve the robustness of the voltage regulating action is therefore required. In order to address this issue, our methodology adopts a supervision process that continuously operates in the background to analyze the network voltage profiles. This process acquires the current nodes voltages and computes a set of characteristic parameters describing the voltage quality. When it detects that these parameters deviate from their nominal values, it generates an alarm notifying the need for computing a more accurate solution of the voltage regulation problem. Once the new optimal regulating devices asset has been computed by using the conventional optimization algorithm, the supervisor process updates the database with the new input/output (current network state/computed solution) information. C. Solution Engine
This module is the conventional and accurate solution engine whose mission is to solve precisely, though slowly, the multiobjective optimization problem described in Section II. We employ here a goal attainment method [29], [30] for the following reasons: This method is not subject to any kind of convexity limitations [29], and it has been shown to be an effective strategy to solve complex engineering problems characterized by nonlinear, multimode, vector objective functions. The goal attainment method takes into account the multicriteria aspect by defining a set of design goals associated with the MSE (15) set of design objectives, together with a set of under- or over-attainment factors. The overall problem is then put as a standard The resulting prediction of the LL algorithm is obtained using optimization problem in accordance to the following mathematone of the two following approaches. ical formalization [30]: 1) Winner-takes-all, where LL returns the prediction of the model with the smaller estimated prediction error
MSE
(16)
2) Model combination, where the final prediction is obtained as a weighted average of the best models. Suppose the have been ordered creating a sequence predictions of integers so that MSE MSE . The is given by prediction
(18) is the set of where is the scalar to minimize, is the set of degrees design goals, while of underachievement or overachievement of the goals. IV. SIMULATION RESULTS
(17) where the weights are the inverse of the leave-one-out mean-square error MSE .
This section assesses the proposed architecture in a voltage regulation task. The experimental session is based on a number of simulation studies in the case of a real medium-voltage network located in the south of Italy (see Fig. 3).
1136
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 21, NO. 3, AUGUST 2006
TABLE I MAIN DGS CHARACTERISTIC
Fig. 4. Hypothesized weekly active power profile generated by the DGSs
The proposed methodology is implemented by combining the following software modules in the Matlab 6.5 environment: • MATLAB LL Toolbox [31], which implements the supervised learning module; • Power System Analysis Toolbox [32], which simulates the network operations; • MATLAB Optimization Toolbox, which solves the multiobjective programming problem by the goal attainment method. The electrical network is based on a real 71-bus mediumvoltage network, whose main parameters are summarized in [33], in the presence of three nondispatchable DGSs (i.e., generation plants equipped with induction generators connected directly to the grid) and three dispatchable DGSs (i.e., generation plants equipped with synchronous generators or induction generators connected to the grid by an ac/dc/ac power electronic interface). The characteristic parameters of the dispatchable DGSs are summarized in Table I. The weekly generated power profiles (see Fig. 4) refer to extremely variable DGSs operations, while the load power profile (see Fig. 5) includes both industrial and residential load patterns. As voltage regulation devices, we consider a line tap changing transformer located at node 1 and two shunt compensators characterized by a nominal power of 2 MVA located at nodes 10 and 28. The regulating devices asset is therefore identified by the following five variables: (20) where is the voltage set point of the line tap changing transformer, is the reactive power set point for the th DGS, and is the admittance set point for the th shunt compensator.
Fig. 5. Weekly load requirement profile (in p.u. of the loads rated power).
The first part of the experiments consists in deriving the optimal regulation devices asset by solving the multiobjective optimization problem formalized in (18) with the goal attainment methodology. As in [14], the objective function to be minimized includes the active power losses, the average voltage deviation, the maximum voltage deviation, and the reactive power cost. As far as the reactive power cost is concerned, we make the following cost hypothesis [4]: 0.003 p.u./MVARh for the reactive energy imported by the AT grid, 0.0022 p.u./MVARh for the reactive energy generated by the static condensers, and 0.01 p.u./MVARh for the reactive energy generated by the dispatchable DGS. The solution of the multiobjective optimization problem at intervals of 60 min is represented by the dotted line in Fig. 6. The second part of the experiment aims to heuristically assess our proposed approach by comparing its solution to the solution returned by goal attainment. To this aim, the goal-attainment solution (168 samples) is split into two subsets. The first one, composed of 24 samples, is used to initialize the knowledge database. The second one, made of 144 samples, serves as a validation set of the working performance of our methodology. The prediction accuracy of the proposed architecture can be visually
VILLACCI et al.: ADAPTIVE LOCAL LEARNING-BASED METHODOLOGY
1137
Fig. 6. Comparison of the profiles computed by the multiobjective optimization with the ones returned by the proposed local learning architecture.
The impacts on the electrical network of the regulating devices asset profiles identified by the proposed architecture compared to those obtained by the time-consuming optimization approach are summarized in Figs. 8–11. A. Results Discussion
Fig. 7. Comparison of the profiles computed by the multiobjective optimization with the ones returned by the proposed local learning architecture.
assessed in Figs. 6 and 7, where the identified regulating devices asset profiles are compared with the ones obtained by the multiobjective optimization technique. In the same figures, we pinpoint the time instants where the supervision process detects the need for a more accurate solution of the voltage regulation problem (i.e., when the minimum distance between the current network state and the stored input vectors exceeded a threshold of 0.05).
The simulated results show that the solution obtained by our local learning architecture is fairly accurate with respect to the time-consuming solution computed by the goal attainment algorithm both in terms of control action and impact on the network. The good degree of accuracy is made possible by the generalization capability of the local learning-based algorithm, which returns a suitable solution to the voltage regulation problem also for highly variable load and generator power patterns. The need for a more accurate solution has been detected only in 23 operating points, where it was necessary to invoke the goal attainment solution algorithm to “tune” the solution identified by the local learning-based algorithm. This makes the proposed methodology particularly appealing for online operating modes since the solution is rapidly identified by the learning system. An estimate of the computation time required by the different algorithms is given in Table II. The figures are the mean times required to solve the voltage regulation problem for the considered weekly scenario. These figures show that the proposed methodology allows about an 85% reduction of the solution time. This is still more relevant if we think that the mean solution time of the proposed approach is expected to decrease all along
1138
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 21, NO. 3, AUGUST 2006
Fig. 8. Minimum and maximum node voltages. (a) Profiles. (b) Prediction error. Fig. 9. Reactive power costs. (a) Profiles. (b) Prediction error.
the control process given that the accuracy of a learning algorithm tends to improve with incoming data. Finally, we note that also in the case of a non-optimal network operation, the traditional multiobjective optimization algorithm appears to take advantage of the supervised learning module, by using the solution returned by the learning system as the initial condition. V. CONCLUSION The increasing presence of dispersed generation systems into distribution networks demands for an effective yet accurate solution of the voltage regulation problem. In order to address this problem, this paper proposed, designed, and assessed an adaptive methodology based on a local learning algorithm. The proposed architecture integrates a database that stores the most relevant historical solutions of the voltage regulation problem, a supervised learning system that aims to predict the optimal regulating devices asset for a given network state, a supervision process that detects non-optimal network operations, and a solution engine that solves, on demand, the voltage regulation problem by using a conventional multiobjective optimization technique and updates the knowledge base as soon as new data samples are available.
The supervised learning strategy adopted in our architecture is based on a local learning technique. The major benefits of this approach are a) it does not require a time-consuming training phase, and b) since training data are stored in a memory, it is straightforward to update the predictor in order to manage time varying phenomena (e.g., unexpected loads variations, increase of DGS penetration, and network topology reconfiguration). The experimental session shows that the proposed methodology returns an effective solution of the voltage regulating problem, even in the presence of highly variable loads and generator power patterns. Computation times confirm that this approach is particularly appealing in online operating modes. This is due to the fact that either the solution is rapidly identified by the learning system or, when a non-optimal operation is detected, the multiobjective optimization algorithm is initialized by a value close to an accurate solution. The full accomplishment of these benefits requires, anyway, the development of suitable control and communication architectures. In particular, the correct operation of both the supervised learning system and the supervision process are strictly related to the availability of a reliable network state estimation
VILLACCI et al.: ADAPTIVE LOCAL LEARNING-BASED METHODOLOGY
1139
REFERENCES
Fig. 10. Mean voltage deviation. (a) Profiles. (b) Prediction error.
TABLE II AVERAGE COMPUTATION TIMES (IN SECONDS) PER ITERATION
continuously adapted by remote bus voltage measurements, remote energy meters, DGSs state acquisitions, and so on. A communication interface between the distribution company and the transmission network operator is also required in order to exchange information on the reactive energy support service charge. Moreover, once a new voltage regulating asset has been identified, a suitable control architecture should transmit the identified set points (commands) to the available regulating devices (possibly belonging to different owners and equipped with nonstandard interfaces). It is opinion of the authors that these are open technological problems that ask for further scientific investigations.
[1] R. Comfort, A. Mansoor, and A. Sundaram, “Power quality impact of distributed generation: effect on steady state voltage regulation,” presented at the PQA 2001 North America Conf. Pittsburgh, PA, 2001. [2] T. E. Kim and J. E. Kim, “Voltage regulation coordination of distributed generation systems in distribution systems,” in Proc. IEEE Power Eng. Soc. Summer Meeting, Jul. 2001, pp. 480–484. [3] J. H. Choi and J. C. Kim, “Advanced voltage regulation method of power distribution systems interconnected with dispersed storage and generation systems,” IEEE Trans. Power Del., vol. 16, no. 2, pp. 329–334, Apr. 2001. [4] R. Caldon, F. Rossetto, and A. Scala, “Reactive power control in distribution networks with dispersed generators: A cost based method,” Elect. Power Syst. Res., vol. 64, pp. 209–217, Mar. 2003. [5] N. Hadjsaid, J.-F. Canard, and F. Dumas, “Dispersed generation impact on distribution networks,” IEEE Comput. Appl. Power, vol. 12, no. 2, pp. 22–28, Apr. 1999. [6] G. Joos, B. T. Ooi, D. cGillis, F. D. Galiana, and R. Marceau, “The potential of distributed generation to provide ancillary services,” in Proc. IEEE Power Eng. Soc. Summer Meeting, July 2000, vol. 3, pp. 1762–1767. [7] M. N. Marwali and A. Keyhani, “Control of distributed generation systems part I: Voltage and current control,” IEEE Trans. Power Electron., vol. 19, no. 6, pp. 1541–1550, Nov. 2004. [8] M. N. Marwali, J. W. Jung, and A. Keyhani, “Control of distributed generation systems part II: Load sharing,” IEEE Trans. Power Electron., vol. 19, no. 6, pp. 1551–1561, Nov. 2004. [9] K. Tomsovich and T. Hiyama, “Intelligent control methods for systems with dispersed generation,” in Proc. IEEE Power Eng. Soc. Winter Meeting, Feb. 2001, vol. 2, pp. 913–917. [10] M. I. Marel, E. F. El-Saadany, and M. M. A. Salama, “Flexible distributed generation: (FDG),” in Proc. IEEE Power Eng. Soc. Summer Meeting, Jul. 2002, vol. 1, pp. 49–53. [11] N. Dizdarevic, M. Majstrovic, and G. Andersson, “FACTS-based reactive power compensation of wind energy conversion system,” in Proc. IEEE Power Tech Conf., Bologna, Italy, 2003. [12] P. Bongrain and D. Voirin, “A new DMS voltage control function for cost effective operation of the network,” presented at the Int. Power Distribution Congress CIDEL, Buenos Aires, Argentina, 2002. [13] D. Rho, H. Kita, J. Hasegawa, and K. Nishiya, “A study on the optimal voltage regulation methods in power distribution systems interconnected with dispersed energy storage and generation systems,” in Proc. Int. Conf. Energy Management Power Delivery, Nov. 1995, vol. 2, pp. 702–707. [14] J. Vallejos, R. Ramos, and B. Baran, “Multi objective optimisation in reactive power compensation,” presented at the IEEE Transmission Distribution Conf. Expo., Atlanta, GA, 2001. [15] B. Barán, J. Vallejos, R. Ramos, and U. Fernández, “Reactive power compensation using a multi-objective evolutionary algorithm,” in Proc. IEEE Porto PowerTech, Porto, Portugal, 2001. [16] A. Augugliaro, L. Dusonchet, S. Favuzza, and E. R. Sanseverino, “Voltage regulation and power losses minimization in automated distribution networks by an evolutionary multiobjective approach,” IEEE Trans. Power Syst., vol. 19, no. 3, pp. 1516–1527, Aug. 2004. [17] R. Caldon and A. Scala, “Artificial neural networks based voltage control in distribution systems with dispersed generation,” in Proc. Int. Conf. Intelligent System Application Power Systems, Budapest, Hungary, Jun. 2001. [18] R. Caldon, A. Scala, and R. Turri, “Voltage control under minimum losses constraint in distribution systems with dispersed generation,” in Proc. 5th IASTED Int. Conf. Power Energy Systems, Rohedes, Greece, Jul. 2001. [19] T. Hastie, R. Tibshirani, and J. Friedman, The Elements of Statistical Learning. Data Mining, Inference and Prediction. New York: Springer-Verlag, 2001. [20] G. Bontempi, M. Birattari, and H. Bersini, “A model selection approach for local learning,” Artif. Intell. Commun., vol. 13, no. 1, pp. 41–48, 2000. [21] M. Birattari, G. Bontempi, and H. Bersini, “Lazy learning meets the recursive least squares algorithm,” in Advances in Neural Information Processing Systems, M. S. Kearns, S. A. Solla, and D. A. Cohn, Eds. Cambridge, MA: MIT Press, 1999, vol. 11, pp. 375–381. [22] D. Villacci, G. Bontempi, A. Vaccaro, and M. Birattari, “The role of learning methods in the dynamic assessment of power components loading capability,” IEEE Trans. Ind. Electron., vol. 52, no. 1, pp. 280–290, Feb. 2005.
1140
[23] T. M. Mitchell, Machine Learning. New York: McGraw-Hill, 1997. [24] G. Bontempi, “Local learning techniques for modeling, prediction and control,” Ph.D. dissertation, IRIDIA- Université Libre de Bruxelles, Bruxelles, Belgium, 1999. [25] G. Bontempi, M. Birattari, and H. Bersini, “Local learning for iterated time-series prediction,” I. Bratko and S. Dzeroski, Eds., Machine Learning: Proceedings of the Sixteenth International Conference San Mateo, CA, Morgan Kaufmann, 1999, pp. 32–38. [26] G. Bontempi, M. Birattari, and H. Bersini, “Lazy Learners at work: The Lazy Learning Toolbox,” presented at the EUFIT ’99—7th Eur. Congress Intelligent Techniques Soft Computing, Aachen, Germany, 1999. [27] G. Bontempi, H. Bersini, and M. Birattari, “The local paradigm for modeling and control: from neuro-fuzzy to lazy learning,” Fuzzy Sets Syst., vol. 121, no. 1, pp. 59–72, Jul. 2001. [28] C. G. Atkeson, A. W. Moore, and S. Schaal, “Locally weighted learning,” Artif. Intell. Rev., vol. 11, no. 1–5, pp. 1–73, Feb. 1997. [29] J. L. Cohon, Multiple Objective Programming and Planning. New York: Academic, 1978. [30] F. W. Gembicki, “Vector optimization for control with performance and parameter sensitivity indices,” Ph.D. dissertation, Case Western Reserve Univ., Cleveland, OH, 1974. [31] M. Birattari and G. Bontempi, The Lazy Learning Toolbox, For Use with Matlab IRIDIA-Univ. Libre de Bruxelles, 1999, Tech. Rep. TR/IRIDIA/99-7. [32] F. Milano, Power System Analysis Toolbox Documentation for PSAT 2004. [Online]. Available: http://www.power.uwaterloo.ca/~fmilano/, Version 1.3.0. [33] A. Vaccaro and D. Villacci, Medium Voltage Test Networks Archive. [Online]. Available: http://www.ing.unisannio.it/psrg/.
Domenico Villacci (M’01) received the M.Sc. degree in electrical engineering in 1985 from the University of Naples “Federico II,” Naples, Italy
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 21, NO. 3, AUGUST 2006
Since 2000, he has been a Full Professor of electric power systems with the Department of Engineering, Università degli Studi del Sannio, Benevento, Italy. His special fields of interest include electric power system analysis, with particular emphasis on innovative architectures for remote control and management of electricity distribution systems, protection and diagnostic of complex systems, integration of distributed generation systems on electrical networks, and grid impacts of renewable sources.
Gianluca Bontempi (M’06) received the M.Sc. degree with honors in electronic engineering from Politecnico of Milan, Milan, Italy, in 1992 and the Ph.D. degree in applied sciences from the Universite Libre de Bruxelles (ULB), Brussels, Belgium, in 1999. Since 2002, he has been an Associate Professor with the Computer Science Department of ULB. He took part in research projects in academy and private companies all over Europe. His interests cover data mining, machine learning, bioinformatics, and numerical simulation. He is the author of more than 30 scientific publications and the coauthor of software for data mining and prediction that was awarded in two international competitions.
Alfredo Vaccaro (M’01) was born in Vico Equense, Italy, on June 5, 1974. He received the M.Sc. degree with honors in electronic engineering in 1998 from the University of Salerno, Salerno, Italy. From 1999 to 2002, he was an Assistant Researcher at the Department of Electrical and Electronic Engineering, University of Salerno. Since 2002, he has been an Assistant Professor in electric power system with the Department of Engineering, Università degli Studi del Sannio, Benevento, Italy. His special fields of interest include soft computing and interval-based methodologies applied to power systems analysis and advanced control architectures for diagnostic and protection of distribution networks. Prof. Vaccaro is an Associate Editor for the IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS.