Sep 9, 1998 - an active mass driver (AMD) and consists of a steel frame with a controllable mass located at ...... The Math Works, Inc. Natick, Massachusetts.
BENCH-SCALE EXPERIMENT FOR STRUCTURAL CONTROL M. Battaini,1 G. Yang2 and B.F. Spencer, Jr.,2 Abstract Experimental verification of structural control strategies is essential for eventual full-scale implementations. However, few researchers have facilities readily available to them that are capable of even small-scale structural control experiments. This paper demonstrates that appropriately constructed bench-scale models can be used to study important aspects of full-scale structural control implementations, including: control-structure interaction, actuator and sensor dynamics, actuator saturation effects, limited availability of sensors, output feedback design, digital control implementation, control spillover, etc. The active control experiment considered herein is shown to be an effective tool for familiarizing students and practitioners with control system design and the associated challenges. Introduction Experimental investigations are essential to obtain a fundamental understanding of many phenomena. However, when physical systems are scaled down to a size appropriate for laboratory study, salient features of their behavior may be lost. This is particularly true for large civil engineering structures. For example, the load-carrying capacity of the steel beams increases as a result of the decrease in beam depth; small size concrete specimen shrinks much more rapidly and uniformly than a large and bulky member, etc. In the area of control of civil structures, it is well-recognized that experimental verification of control strategies is necessary to focus research efforts in the most promising directions (Housner, et al. 1994a,b). However, few researchers have experimental facilities readily available to them that are capable of even small-scale structural control experiments. Consequently, the majority of control studies to date have been analytical in nature, a substantial number of which have employed models that lacked important features of the physical problem. One such phenomena that has been neglected for many years is control-structure interaction (CSI). Through a series of analytical and experimental studies, Dyke, et al. (1995) recognized that understanding CSI was key to developing acceleration feedback control strategies and showed that accounting for CSI is fundamental to achieving high performance controllers. This paper discusses the efficacy of a recently developed bench-scale structural control experiment. The model structure employed in the experiment represents a building controlled by an active mass driver (AMD) and consists of a steel frame with a controllable mass located at the top. The model was chosen because of the large number of full-scale implementations of this class Department of Structural Mechanics, University of Pavia, Via Ferrata 1, I27100 Pavia - Italy Department of Civil Engineering and Geological Sciences, University of Notre Dame, Notre Dame, Indiana 46556-0767, U.S.A. 1. 2.
September 9, 1998
1
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
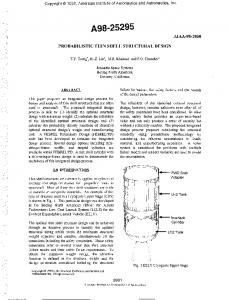
of systems (Soong 1990; Fujino, et al., 1996; Housner, et al., 1997; Spencer and Sain, 1997). The experiment is shown to allow for study of many intrinsic features of full-scale systems, including control-structure interaction, actuator and sensor dynamics, actuator saturation effects, limited availability of sensors, output feedback design, digital control implementation, control spillover, etc. It is envisioned that the total cost of this system, including the structural model, AMD, sensors, digital control system, power amplifier, spectrum analyzer, etc., is well within the range of most educational institution. Experiment Setup The equipment used for the active control experiment, performed in the Structural Dynamics and Control Earthquake Engineering at the University of Notre Dame, consisted of (see Figs. 1 and 2): •
Structure: The structural specimen, manufacutured by Quanser Consulting Inc., is a model of a flexible building, which can be configured to have either 1 or 2 floors. Herein, a 2-floor configuration of the model is employed. The interstorey height is 490 mm, with each column being steel with a section of 2 × 108 mm. The total mass of the structure is 4.259 kg, where the first floor mass is 1.689 kg, the second floor mass is 1.662 kg, and the mass of each column is 0.227 kg. The structure has the natural frequencies of 1.24 Hz and 3.57 Hz which have corresponding damping ratios of 0.02 and 0.055 respectively.
Power Amplifier u ma
m2
m1
x ra
x˙˙a2
x˙˙a1
Computer Controller
x˙˙g
Figure 1: Bench-scale building model.
September 9, 1998
Figure 2: Experimental set-up
2
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
Figure 3: Active mass driver (AMD).
•
Active Mass Driver (AMD): The AMD provides the control force to the structure. As shown in Fig. 3, it consists of a moving cart with a DC motor that drives the cart along a geared rack. The mass position control is obtained by a PD controller with displacement feedback. The maximum stroke is ± 9.5 cm and the total moving mass is 454 g.
•
Sensors: Two Kistler K-Beam 8304A capacitive DC accelerometers with full scale range of 2 g and sensitivity of 1024 mV/g were employed. The accelerometers are placed on each floor of the structure. Additionally, a potentiometer is attached to the motor to measure the cart position relative to its base, with a full scale of ± 5 V and a sensitivity of 0.362 V/cm.
•
Digital Controller: Digital control is achieved by use of the MultiQ I/O board with the WinCon realtime controller. The controller is developed using SIMULINK (1997) and executed in realtime using WinCon. This board has a 13-bit analog/digital (A/D) and 12-bit digital/analog (D/A) converters with eight input/output analog channels. The SIMULINK code is automatically converted to C code and interfaced through the Wincon software to run the control algorithm on the CPU of the PC.
•
Spectrum Analyzer: A 2-input/2-output PC-based spectrum analyzer manufactured by DSP Technology is employed for data acquisition and analysis. The device has a 90 dB signal to noise ratio and includes 8-pole elliptical antialiasing filters, programmable gains on the inputs/ outputs, user selectable sample rates and a MATLAB (1997) user interface. These features allow for direct acquisition of high quality data and transfer functions for system identification and response analysis.
•
Computer: The computer used to house the MultiQ programmable I/O board and to interface with the spectrum analyzer is a 90 MHz Pentium-based Gateway 2000 computer configured with 40 MB of RAM.
September 9, 1998
3
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
Sensors, Actuators and Control-Structure Interaction Accounting for sensor and actuator dynamics is well-known to be essential for the design of high quality control systems. In particular, Dyke, et al. (1995) has shown that neglecting actuator dynamics can produce poor, or perhaps catastrophic, performance of the controlled system due to the unmodeled or mismodeled dynamics of the actuator-structure interaction (i.e., control-structure interaction). This section discusses models for the sensors/actuators employed in the benchscale experiment and demonstrates that the bench-scale model can be used to effectively study the phenomena of control-structure interaction (CSI). Until recently, most of the current active structural control strategies for aseismic protection have been based on either full-state feedback (i.e., all structural displacements and velocities) or on velocity feedback. However, accurate measurement of displacements and velocities is difficult to achieve directly in full-scale applications, particularly during seismic activity, since the foundation of the structure is moving with the ground. Alternatively, accelerometers can provide reliable and inexpensive measurement of accelerations at strategic points on the structure and have recently been shown to be effective in structural control implementations (Spencer, et al., 1991, 1994; Suhardjo, et al., 1992; Dyke, et al. 1995b, 1996). Therefore, floor accelerations will be the primary measurements used to control the structure. The capacitive accelerometers employed in this experiment have flat frequency response with zero phase lag from DC to 300 Hz. Therefore, in the frequency range of interest for the bench-scale structure, sensor dynamics can be neglected, and the acceleration can be treated as a directly measured response as follows x˙˙ai = α a ( v ai – v a0 )
(1)
where v ai is the voltage measured from the ith accelerometer, v a0 is the accelerometer offset voltage, and α a is the sensitivity constant for the accelerometer. The position of the AMD relative to the second floor is another readily available measurement. A potentiometer is mounted on the AMD cart and a small gear attached that rotates as the AMD moves. The response of the potentiometer is flat in the frequency range of interest for this experiment. Therefore, the AMD potentiometer can be related directly to the relative displacement of the AMD cart by x ra = α d ( v p – v p0 )
(2)
where v p is the voltage measured from the potentiometer, v p0 is the potentiometer offset voltage, and α d is the sensitivity constant for the potentiometer. To see the importance of accounting for actuator dynamics and how control-structure interaction (CSI) is manifested in the bench-scale model, consider a simple two degree-of-freedom model of the structure given by
September 9, 1998
4
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
m 1 0 x˙˙1 c 1 + c 2 – c 2 x˙1 k 1 + k 2 – k 2 x 1 m1 0 1 0 + + = – x˙˙g – f – c 2 c 2 x˙2 –k 2 k 2 x2 0 m 2 x˙˙2 0 m2 1 a
(3)
where x i is the displacement of the ith floor relative to the ground, m i , c i , k i are the mass, stiffness and damping, respectively of the ith floor, x˙˙g is the ground acceleration, and f a is the force generated by the AMD. Next, a mathematical model for the AMD is developed. The torque T m (N-m) generated by the DC motor employed in the AMD is given by (Kuo, 1987), Ra K bK iK g Ki dT m ----------- = – -----T m – -------------------- x˙ar + -----V m La La r m La dt
(4)
–3
where V m is the voltage applied to the motor, K b = 7.67 × 10 V-sec is the back electromotive –3 force constant, K i = 7.67 × 10 N-m/amp is the torque constant, K g = 3.7 is the internal gear –4 ratio, R a = 2.6 ohms is the armature resistance of the motor, L a = 1.8 × 10 Herry is the armature inductance of the motor, r m = 0.635 cm is the motor gear radius, and x˙ra is the velocity of the AMD relative to the second floor. Therefore the force f a generated by the AMD is T mK g f a = ------------rm
(5)
By neglecting the rotor inertia of the motor in comparison to the mass of the cart, Eq. (5) can also be written as f a = m a x˙˙aa = m a ( x˙˙ra + x˙˙2 + x˙˙g )
(6)
where m a is the mass of the AMD, x˙˙aa is the absolute acceleration of the AMD mass, x˙˙ra is the acceleration of the AMD mass relative to the second floor, and x˙˙g is the absolute acceleration of the ground. Combining Eqs. (4–6) yields df ---------a = – ε f a – βx˙ra + γ V m dt
(7)
f x˙˙ra = -----a- – ( x˙˙2 + x˙˙g ) ma
(8) 2
2
where ε = R a ⁄ L a is the time constant of the motor, β = K b K i K g ⁄ L a r m , and γ = K i K g ⁄ L a r m . As can be seen from Eqs. (7–8), the dynamics of the AMD are tightly coupled to the response of the structure to which it is attached. Figure 4 is a block diagram representation of the AMD model given in Eqs. (7–8). Here, H x 2 f a denotes the transfer function from the force applied by the actuator to the displacement of the second floor (i.e., the point on the structure where the
September 9, 1998
5
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
Ha Motor Voltage, Vm
γ
1 ----------2ma s
ε
+
–
+ –
+
1 --s
f˙a
–
fa H x2 f a ( s )
β
x ra
x˙ra
x2
s
Natural Velocity Feedback
Figure 4: Block diagram of open-loop motor model.
actuator is attached) and there is no ground acceleration. Notice the presence of the “natural” velocity feedback in the open-loop system. Through this feedback interaction path, the dynamics of the structure directly affect the characteristics of the control actuator (i.e., the phenomena of CSI is intrinsic to this system). To see the presence of CSI more explicitly, the transfer function from the motor voltage V m to the force f a applied to the structure is given by sγd ( s ) H f a V m ( s ) = ----------------------------------------------------------------------2 β s 2 + εs + ----- d ( s ) – s βn ( s ) m a
(9)
where H x 2 f a = n ( s ) ⁄ d ( s ) , and based on Eq. (3) 2
n ( s ) = m1 s + c1 + c2 s + k 1 + k 2 4
3
(10)
d ( s ) = m 1 m 2 s + ( m 1 c 2 + m 2 c 1 + m 2 c 2 )s + ( c 1 c 2 + m 1 k 2 + m 2 k 1 + m 2 k 2 )s + ( c 1 k 2 + c 2 k 1 )s + k 1 k 2
2
(11)
Note that the roots of d ( s ) = 0 are the natural frequencies (i.e., the poles) of the structure. Examining Eq. (9) shows the classical control-structure interaction phenomena, where the poles of the structure are zeros of the actuator transfer function. As is the case with many control actuators employed in civil engineering applications (see, for example, Chung, et al. 1989 and Dyke, et al. 1995b, 1996), the open-loop dynamics of the
September 9, 1998
6
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
bench-scale AMD are unstable. The typical approach stabilizing the system is to add a PD position feedback loop in which x˙ra x ra V m = k p u – -----– k d ----- αd αd
(12)
where u is the control signal, k p is the proportional gain, k d is the differential gain, and α d is the sensitivity of the potentiometer. Equation (7) then becomes γ k p x ra df γk ---------a = – ε f a – β + -------d- x˙ra – -------------- + γ kpu dt αd αd
(13)
and the transfer function from the command signal u to the force f a can be written as 2
s γ k pd (s) H f a u ( s ) = -----------------------------------------------------------------------------------------------------------------------------------------------------------α β + γ k γ k γk γk p 3 2 2 d d p d s + εs + ------------------------s + ------------- d ( s ) – s β + -------- s + -------- n ( s ) αd ma α d m a αd αd
(14)
Equation (14) also shows that the poles of the structure are the zeros of the stabilized actuator transfer function. Fig. 5 shows the transfer function H x˙˙aa u ( s ) from the AMD command signal u to its absolute acceleration x˙˙aa , which is proportional to the AMD force f a . As predicted, the zeros of this transfer function are at 0, 1.24, and 3.57 Hz. The two zeros at origin are due to the 30
20
Magnitude (dB)
10
0
−10
−20
AMD mounted to ground AMD mounted to structure
−30
−40
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
Figure 5: Transfer function from the command signal u to the AMD acceleration x˙˙aa .
September 9, 1998
7
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
x˙˙g u
x ra Structural
x˙˙a1
System x˙˙a2
Figure 6: System identification block diagram.
rigid body mode of the AMD mass. The other two zeros correspond to the two natural frequencies of the structure. For comparison, the transfer function corresponding to the case in which the AMD is rigidly connected to the ground is superimposed on Fig. 5. As can be seen, the zeros present in the actuator transfer function when it was mounted to the structure are no longer present in the transfer function when the AMD is mounted to the ground. The implication of the presence of CSI shown here are profound: at the frequencies where the structural response is the greatest (i.e., the poles), the actuator has the least ability to input forces to the structure. Note that for many years the role of control-structure interaction in protective system designs was not well recognized, but was incorrectly viewed to be a time delay. As was shown in Dyke, et al. (1995a), accounting for control-structure interaction is essential to achieving high quality control. Experimental Model Identification One of the most important and challenging components of control design is the development of an accurate mathematical model of the structural system. There are several methods by which to accomplish this task. One approach is to directly identify the unknown constants in a parametric model such as given in Eqs. (3, 7–8). The approach employed in this study for developing the necessary dynamical model of the structural system is to measure the input/output relationships of the system and construct a mathematical model that can replicate this behavior. Such input-output models obtained directly from data have been shown to be effective for designing high-performance controllers (Dyke, et al. 1995a,b, 1996). Note that this identification procedure automatically incorporates control-structure interaction into the resulting model. The first step in the system identification process is to experimentally determine the transfer functions (also termed frequency response functions) from each of the system inputs to each of the outputs. A block diagram of the structural system (Fig. 1) to be identified is shown in Fig. 6. The two inputs are the ground excitation x˙˙g and the command signal to the actuator u . The three measured system outputs include the absolute accelerations, x˙˙a1 , x˙˙a2 , of the two floors of the test structure and the actuator displacement x ra . Thus, a 3 × 2 transfer function matrix (i.e., six input/ output relations) must be identified to describe the characteristics of the system in Fig. 6.
September 9, 1998
8
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
Subsequently, each of the experimental transfer functions is modeled as a ratio of two polynomials in the Laplace variable s (i.e., the poles, zeros and gain) and then used to determine a state space representation for the structural system. Because the system under consideration is a multiinput/multi-output system (MIMO), construction of the state space model is not straightforward. First, two separate systems were formed, each with a single input corresponding to one of the two inputs to the system. Once both of the component system state equations were generated, the MIMO system was formed by stacking the states of the two individual systems. However, the dynamics of the test structure itself were redundantly represented in this combined state space system, and the state space system had repeated eigenvalues for which the eigenvectors were not linearly independent (i.e., the associated modes were not linearly independent). A minimal realization of the system was found by performing a model reduction. This approach is described in more detail in Dyke, et al. (1994). The analytical models of three representative transfer functions are compared with the experimentally obtained transfer function in Figs. (7–9). The transfer function H x˙˙a2 x˙˙g ( s ) from the ground acceleration to the absolute acceleration of the second floor is shown in Fig. 7, the transfer function H x˙˙a2 u ( s ) from the cart command signal to the absolute acceleration of the second floor is shown in Fig. 8, and the transfer function H x ra u ( s ) from the actuator command to the cart displacement relative to the second floor is shown in Fig. 9. The identified model of the structural system, which includes the structure and the AMD, is finally given by 40
Experimental Model
Magnitude (dB)
20 0 −20 −40 −60
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
100
Phase (deg)
0 −100 −200 −300 −400
Figure 7: Transfer function from the ground acceleration x˙˙g to the second floor absolute acceleration x˙˙a2 .
September 9, 1998
9
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
Magnitude (dB)
20
0
−20
Experimental Model
−40
−60
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
200
Phase (deg)
100
0
−100
−200
Figure 8: Transfer function from cart command signal u to the second floor absolute acceleration x˙˙a2 .
15
Experimental Model
Magnitude (dB)
10 5 0 −5 −10 −15
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
50
Phase (deg)
0
−50
−100
−150
Figure 9: Transfer function from cart command signal u to the cart displacement relative to the second floor x ra .
September 9, 1998
10
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
x˙ = Ax + Bu + Ex˙˙g
(15)
y = Cx + Du + Fx˙˙g + v
(16)
where x is the state vector of the system, y = [ x a1 x a2 x ra ]′ is the vector of measured responses, and v represents the noise in the measurements. Note that there are 7 state variables in the state vector x , in which 4 states correspond to the structure, 2 states correspond to the AMD, and the other one corresponds to the dynamic of the motor. H2/LQG Controller Design To illustrate some of the constraints and challenges that can be studied through the benchscale model, an infinite horizon, linear quadratic Gaussian (LQG/ H 2 ) control design is presented. The LQG/ H 2 approach is an output feedback design method that has been shown to be effective for design of acceleration feedback control strategies for this class of systems (Spencer, et al., 1991, 1994; Suhardjo, et al., 1992; Dyke, et al. 1995b, 1996). Note that although the ground acceleration is an available measurement, this design will not make use it. To simplify design of the controller, x˙˙g is taken to be a stationary white noise, and an infinite horizon performance index is chosen that weights the accelerations of the three floors, i.e., 1 J = lim --- E τ τ→∞
τ
∫ { ( Cx + Du )′Q ( Cx + Du ) + ru 0
2
} dt (17)
where all of the elements of the weighting matrix Q are zero, except for Q 11 and Q 22 . Further, the measurement noise is assumed to be identically distributed, statistically independent Gaussian white noise processes, and S x˙˙g x˙˙g ⁄ S vi vi = γ = 25 . Note that the infinite horizon LQG approach is equivalent to H 2 control method (Spencer, et al., 1994). The separation principle allows the control and estimation problems to be considered separately, yielding a controller of the form (Stengel 1986; Skelton 1988) u = – Kxˆ
(18)
where xˆ is the Kalman Filter estimate of the state vector based on the reduced order model. By the certainty equivalence principle (Stengel 1986; Skelton 1988), K is the full state feedback gain matrix for the deterministic regulator problem given by ˜ ′ + B′P ) ⁄ r˜ K = (N
(19)
where P is the solution of the algebraic Riccati equation given by ˜ ˜ +A ˜ ′P – PBB′P ⁄ r˜ + Q 0 = PA
September 9, 1998
11
(20)
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
and ˜ = C′QD N
(21)
r˜ = r + D′QD
(22)
˜ = C′QC – N ˜N ˜ ′ ⁄ r˜ Q
(23)
˜ = A – BN ˜ ′ ⁄ r˜ A
(24)
Calculations to determine K were done using the MATLAB (1997) routine lqry.m within the control toolbox. The Kalman Filter optimal estimator is given by xˆ˙ = Axˆ + Bu + L ( y – Cxˆ – Du ) –1
L = [R ( γFE′ + CS )]′ ˜ where S is the solution of the algebraic Riccati equation given by
(25) (26)
0 = SA + A ′S – SG S + H ˜ ˜ ˜ ˜
(27)
R = I + γFF′ ˜
(28)
and
–1
A = A′ – C′R ( γFE′ ) ˜ ˜ –1
G = C′R C ˜ ˜ 2
(29) (30)
–1
H = ( γE )E′ – γ EF′R FE′ (31) ˜ ˜ Calculations to determine L were done using the MATLAB routine lqew.m within the control toolbox. Sample code to design these controllers are available at http://www.nd.edu/~quake/ under the “Benchmarks” heading (Spencer, et al., 1998). Control Implementation Issues The controllers used in this experiment were implemented on the PC and interfaced with the experiment using the MultiQ programmable I/O board. There are a number of issues that should be understood and addressed to successfully implement a control design digitally, several of which are discussed in this section. Further information regarding implementation concepts is provided in Quast, et al. (1995).
September 9, 1998
12
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
The method of “emulation” is used for the design of the discrete-time controller. Using this technique, a continuous-time controller was first designed which produced satisfactory control performance (see control design section). The continuous-time controller is then approximated or ‘emulated’ with an equivalent digital filter using the bilinear transformation. Typically, with the use of emulation, if the sampling rate of the digital controller is at least 10-25 times the closedloop system bandwidth, the discrete equivalent system will adequately represent the behavior of the emulated continuous-time system over the frequency range of interest. Such a sampling rate performance was successfully achieved by the system used in this experiment. Once the final controller has been designed using SIMULINK, it is converted to C code using RTW and run in realtime using WinCon. The controller sampling rate is fixed at 1000 Hz in order to satisfy the digital controller implementation issues. The sampling rate that is achievable by a digital control system is limited by such things as the rate at which A/D and D/A conversions can be performed, the speed of the processor and the number of calculations required to be performed by the processor during a sampling cycle (Quast, et al., 1995). For this experiment, all I/O processes, control calculations, and supervisory functions were performed in less than 1 msec, allowing for sampling rates on the order of 1 kHz, although such high sampling rates are not required for this application. The model on which the control design was based was acceptably accurate below 5 Hz, but significant modeling error was present at higher frequencies. If one tries to affect high-authority controllers at frequencies where the system model is poor, catastrophic results may occur. Thus, for the structural system under consideration, no significant control effort was applied above 5 Hz. The loop gain transfer function (breaking the control loop at the input to the system) was examined in assessing the various control designs. By “connecting” the measured outputs of the analytical system model to the inputs of the mathematical representation of the controller, the loop gain transfer function from the actuator command input to the controller command output was calculated. The loop gain was used to provide an indication of the closed loop stability for the controller implemented on the physical system. For stability purposes, the loop gain should be less than one at the higher frequencies where the model poorly represents the structural system (i.e., above 5 Hz). Thus, the magnitude of the loop gain transfer function should roll off steadily and be well below unity at higher frequencies. A control design was considered to be acceptable for implementation if the magnitude of the open loop transfer function at high frequencies was well below 0 dB at frequencies greater than 5 Hz. Figure 10 shows the measured loop gain transfer functions of the controller. Results The response of the bench-scale structure for the uncontrolled and controlled cases are presented. Figures. 11–12 show the transfer functions from the ground acceleration to the first and second floor acceleration, respectively. The structure was subjected to the El-Centro earthquake scaled to 35% amplitude as show in Fig. 13. Figures 15–14 show the absolute acceleration of the first floor x˙˙a1 and the second floor September 9, 1998
13
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
20
15
10
Magnitude (dB)
5
0
−5
−10
−15
−20
Experimental loop gain Analytical loop gain
−25
−30
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
Figure 10: Loop-gain transfer functions.
20
Experimental uncontrolled Experimental controlled Analytical controlled
10
Magnitude (dB)
0
−10
−20
−30
−40
−50
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
Figure 11: Transfer function from the ground acceleration x˙˙g to the first floor absolute acceleration x˙˙a1 .
September 9, 1998
14
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
30
Experimental uncontrolled Experimental controlled Analytical controlled
20
10
Magnitude (dB)
0
−10
−20
−30
−40
−50
0
1
2
3
4
5 6 Frequency (Hz)
7
8
9
10
Figure 12: Transfer function from the ground acceleration x˙˙g to the second floor absolute acceleration x˙˙a2 .
150
100
2
Acceleration (cm/s )
50
0
−50
−100
−150
0
10
20
30 Time (sec)
40
50
60
Figure 13: Measured table acceleration due to 35% El Centro drive signal.
September 9, 1998
15
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
250
200
150
Acceleration (cm/s2)
100
50
0
−50
−100
−150
Uncontrolled Controlled
−200
−250
0
10
20
30 Time (sec)
40
50
60
Figure 15: First floor absolute acceleration x˙˙a1 due to 35% El Centro earthquake excitation.
400
300
Acceleration (cm/s2)
200
100
0
−100
−200
−300
−400
Uncontrolled Controlled 0
10
20
30 Time (sec)
40
50
60
Figure 14: Second floor absolute acceleration x˙˙a2 due to 35% El Centro earthquake excitation.
September 9, 1998
16
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
3
2
Displacement (cm)
1
0
−1
−2
−3
0
10
20
30 Time (sec)
40
50
60
Figure 16: AMD relative displacement x ra due to 35% El Centro earthquake excitation.
x˙˙a2 of the bench-scale structure when excited by the 35% N-S component of the 1940 El Centro earthquake. Figures 16–17 show the relative displacement x ra and the acceleration x˙˙aa of the AMD when controller is on. Table 1 provides a summary of the peak responses for the controlled and uncontrolled systems. As can be seen from these results, the acceleration feedback control systems are quite effective. Note that at 116% El Centro earthquake, the AMD reaches its stroke limit (i.e., the actuator saturation). Therefore, this benchscale model can provide an effective platform for studying such phenomenon. Research is currently underway at University of Notre Dame focusing on this issue. Table 1: Peak responses due to 35% El Centro earthquake. x˙˙a1
x˙˙a2
(cm/s2)
uncontrolled (mass locked) controlled
Controller
September 9, 1998
x˙˙aa
(cm/s2)
x ra (cm)
(cm/s2)
u (V)
230.67
314.09
—
314.09
—
124.38
204.99
2.871
452.85
1.900
17
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
500
400
300
2
Acceleration (cm/s )
200
100
0
−100
−200
−300
−400
0
10
20
30 Time (sec)
40
50
60
Figure 17: AMD absolute acceleration x˙˙aa due to 35% El Centro earthquake excitation.
Conclusions This paper has shown that appropriately constructed bench-scale models can be used to study important aspects of full-scale structural control implementations. Important issues such as sensor/actuator dynamics, control-structure interaction, actuator saturation, output feedback control design, digital control implementation, etc., are all readily examined using the bench-scale model, making it an effective tool for familiarizing students and practitioners with control system design and the associated challenges. It is envisioned that the total cost of this system, including the structural model, AMD, sensors, digital control system, power amplifier, spectrum analyzer, small-scale shaking table etc., is well within the range of most educational institution. Acknowledgment The partial support of the National Science Foundation under Grant Nos. CMS 95–00301 and CMS 95–28083 (Dr. S.C. Liu, Program Director) is gratefully acknowledged. We also wish to thank Quanser Consulting Inc. for providing the bench-scale structure, the active mass driver, the MultiQ I/O board and the WinCon software used in this work.
September 9, 1998
18
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
References Chung, L.L., R.C. Lin, T.T. Soong & A.M. Reinhorn (1989). Experiments on Active Control for MDOF Seismic Structures,” J. of Engrg. Mech., ASCE, Vol. 115, No. 8, pp. 1609–1627. Dyke, S.J., Spencer Jr., B.F., Quast, P., Sain, M.K. Kaspari Jr., D.C. and Soong, T.T. (1994). “Experimental Verification of Acceleration Feedback Control Strategies for An Active Tendon System,” Nat. Ctr. for Earthquake Engrg. Res. Tech. Rpt. NCEER–94–0024, August 29, 1994. Dyke, S.J., Spencer Jr., B.F., Quast, P. and Sain, M.K. (1995a). “The Role of Control-Structure Interaction in Protective System Design,” J. Engrg. Mech., ASCE, Vol. 121, No. 2, pp. 322– 338. Dyke, S.J., Spencer Jr., B.F., Quast, P., Sain, M.K. Kaspari Jr., D.C. and Soong, T.T. (1995b). “Acceleration Feedback Control of MDOF Structures,” J. Engrg. Mech., ASCE, Vol. 122, No. 9, pp. 897–971. Dyke, S.J., Spencer Jr., B.F., Quast, P., Kaspari Jr., D.C. and Sain, M.K. (1996). “Implementation of an Active Mass Driver Using Acceleration Feedback Control,” Microcomputers in Civil Engrg: Special Issue on Active and Hybrid Structural Control, Vol.11, pp. 305–323. Fujino, Y., Soong, T.T. and Spencer Jr., B.F. (1996). “Structural Control: Basic Concepts and Applications,” Proc. ASCE Struct. Cong. XIV, Chicago, Illinois, pp. 1277–1287. Housner, G.W., Soong, T. T., Masri, S. F. (1994a). “Second Generation of Active Structural Control in Civil Engineering,” Proc., 1st World Conf. on Struct. Control, Pasadena, Panel:3–18. Housner, G.W., Soong, T. T., Masri, S. F. (1994b). “Second Generation of Active Structural Control in Civil Engineering,” Microcomputers in Civil Engineering, Vol. 11 No. 5, pp. 289– 296. Housner, G.W., Bergman, L.A., Caughey, T.K., Chassiakos, A.G., Claus, R.O., Masri, S.F., Skelton, R.E., Soong, T.T., Spencer Jr., B.F. and Yao, J.T-P. (1997). “Structural Control: Past Present and Future,” J. Engrg. Mech., ASCE, Vol. 123, No. 9, pp. 897–971. Kuo, B.C. (1987). Automatic Control Systems. 5th ed., Prentice-Hall, Englewood Cliffs, N.J. MATLAB (1997). The Math Works, Inc. Natick, Massachusetts. Quanser Consulting Corporation (1995). User Manuals, Ontario, Canada. Quast, P., Spencer Jr., B.F., Sain, M.K. and Dyke, S.J. (1995). “Microcomputer Implementations of Digital Control Strategies for Structural Response Reduction,” Microcomputers in Civil Engrg., Vol. 10, 1995, pp. 13–25. SIMULINK (1997). The Math Works, Inc. Natick, Massachusetts. Skelton, R.E. (1988). Dynamic Systems Control: Linear Systems Analysis and Synthesis. Wiley, New York. Soong, T.T. (1990). Active Structural Control: Theory and Practice, Longman Scientific and Technical, Essex, England. Spencer Jr., B.F., Suhardjo, J. and Sain, M.K., (1991). “Frequency Domain Control Algorithms for Civil Engineering Applications,” Proc. of the Int. Workshop on Tech. for Hong Kong’s Infrastructure Dev., Hong Kong, pp. 169–178.
September 9, 1998
19
Battaini, Yang, Spencer
Bench-Scale Experiment for Structural Control
Spencer Jr., B.F., Suhardjo, J. and Sain, M.K. (1994). “Frequency Domain Optimal Control for Aseismic Protection,” J. Engrg. Mech., ASCE, Vol. 120, No. 1, pp. 135–159. Spencer Jr., B.F. and Sain, M.K. (1997). “Controlling Buildings: A New Frontier in Feedback,” IEEE Control Systems Magazine: Special Issue on Emerging Technologies (Tariq Samad, Guest Ed.), Vol. 17, No. 6, pp. 19–35. Spencer Jr., B.F., Dyke, S.J. and Doeskar, H.S. (1998). “Benchmark Problems in Structural Control, Part I: Active Mass Driver System,” Earthquake Engrg. and Struct. Dyn.: Special Issue on the Benchmark Structural Control Comparison, to be published. Stengel, R.F. (1986). Stochastic Optimal Control: Theory and Application. Wiley, New York. Suhardjo, J., Spencer Jr., B.F., and Kareem, A. (1992). “Frequency Domain Optimal Control of Wind Excited Buildings,” J. Engrg. Mech., ASCE, Vol. 118, No. 12, pp. 2463–2481.
September 9, 1998
20
Battaini, Yang, Spencer