Mp. Mass of the pendulum p(t). External force applied to the shear frame ... Elastic microdisplacement or break away distance of F(u(t)) from rest ..... pre-determined parameterization that is assumed to capture the relevant dynamics of .... As a subset, there exist numerous investigations of modeling stick-slip behavior of dry.
UNIVERSITY OF CALIFORNIA, SAN DIEGO
Damage Detection in Dynamic Systems with Nonlinearities
A thesis submitted in partial satisfaction of the requirements for the degree Masters of Science in Engineering Sciences (Applied Mechanics)
by
William Bruce Dunbar
Committee in charge: Professor John B. Kosmatka, Chairperson Professor Raymond de Callafon Professor Miroslav Krstic
1999
The thesis of William Bruce Dunbar is approved:
Chair University of California, San Diego 1999
iii
TABLE OF CONTENTS Signature Page . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iii
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iv
Nomenclature Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvi 1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
Mathematical Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 1. Methods of Parametric Identi cation of Nonlinear Structural System Models for Damage Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 2. Methods of Fault Detection and Isolation in Nonlinear Electro-Mechanical Systems 16
3
Alternate Approaches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Selection of a Structural Fault Estimation Method . . . . . . . . . . . . . . . . . . 2. Selection of a Dry Friction Fault Detection and Isolation Method . . . . . . . . .
21 21 25
4
Parameter Estimation of a Damaged Structure Using a Quasilinearization Approach 1. Procedure for Parameter Estimation of a Nonlinear Structural Model . . . . . . . 2. Analytic Model of a Nonlinear Space Antenna Structure . . . . . . . . . . . . . . 3. Quasilinearization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Step 1 : Linearization of Equations and Solution Form . . . . . . . . . . . . . 2. Step 2 : Generation of Recursive Solution . . . . . . . . . . . . . . . . . . . . . 3. Step 3 : Minimization of Cost Function and Estimate Generation . . . . . . . 4. Application to Modi ed Kabe Model . . . . . . . . . . . . . . . . . . . . . . . . . 5. Application Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Discussion of Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Conclusions and Extension to Damage Detection . . . . . . . . . . . . . . . . . . 1. Extension of Application of Quasilinearization to Damage Detection . . . . . .
30 31 31 33 33 35 35 36 38 41 45 47
5
Detection and Isolation of a Dry Friction Fault in a Pneumatically Actuated Air Bearing Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. The Pneumatic Actuation of an Air Bearing Mass . . . . . . . . . . . . . . . . . . 3. Procedure for Dry Friction Fault Detection . . . . . . . . . . . . . . . . . . . . . . 4. Dynamic Modeling of the Pneumatically Actuated Air Bearing Mass . . . . . . . 1. Analytic Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. Experimental Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Friction Detection by Monitoring Acceleration . . . . . . . . . . . . . . . . . . . . 1. Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. Dynamic Relation Between Friction Force and Measured Acceleration . . . . .
56 56 57 62 64 64 66 75 75 75
iv
1 4 8
6. Experimentally Based Modeling Approach . . . . . . . . . . . . . . 1. Assume a Friction Model . . . . . . . . . . . . . . . . . . . . . . 2. Identi cation of Dynamic Friction Signal Filter . . . . . . . . . . 3. Incorporation of Friction Model with Model Based Filter . . . . 4. Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Dry Friction Fault Detection Results . . . . . . . . . . . . . . . . . 1. Numerical Validation . . . . . . . . . . . . . . . . . . . . . . . . 2. Results for Application to the Precision Positioning Experiment 8. Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
76 76 77 77 78 80 81 83 91
Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
A Selection of Nonlinear Structural Spring by Modal Participation . . . . . . . . . . . . 109 B Friction FDI Scheme Source Code and Numerical Analysis Model . . . . . . . . . . . 112 C Linear Transfer Function Model Performance in the Precision Positioning Apparatus 119 Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
v
NOMENCLATURE TABLES Chapter 2 Nomenclature
a A Ab b c
Unknown shear frame parameter vector Matrix in algebraic equations Augmented state matrix for state vector x� k Vector in algebraic equations Unknown initial condition vector(u(0)) �c Incremental estimate of c C Damping matrix of an o�shore tower structure Cd Drag coe�cient matrix of wave forces Cm Inertia coe�cient matrix of wave forces F Input force to inverted pendulum cart g(u) Vector function in vector u state space model gu Jacobian of g with respect to u g (X ; uin; t) Vector function in vector X state space model G(z ?1 ) Discrete linear transfer function h(x; x;_ a) Elastic and inelastic restoring forces in the shear frame H State to observation matrix for state vector X J (a) Direct approach least-squares functional J (u) Gauss-Newton approach least-squares functional K0 Sti�ness matrix of an o�shore tower structure K (k + 1) Kalman gain matrix l Length of the pendulum M Mass of the cart and pendulum M0 Mass matrix of an o�shore tower structure Mp Mass of the pendulum p(t) External force applied to the shear frame P (k + 1=k) State error covariance matrix for predicted state X (k + 1=k) RARMA ARMA parity equation residual RMA MA parity equation residual u Input variable
vi
Chapter 2 Nomenclature, Continued
u0 �u
Input set point value Input error u Augmented state vector in Gauss-Newton approach u0 Best a priori guess of unknown initial condition u(0) uin Input for vector X state equations v(k) Discretized observational noise vector v_ ; v Horizontal wave particle velocity, acceleration vectors w(k) Discretized system noise vector W; V State, output noise covariance matrices x Shear frame position x0 Shear frame base acceleration excitation xc Translational position of an inverted pendulum cart xk Discretized state vector of the linearized pendulum/cart dynamics x� k State vector xk augmented with unknown system and observation inputs x^ k Filter estimation of augmented state vector x^ k X Augmented state vector in extended Kalman lter approach X (k + 1=k) Filtered predicted state vector y Output variable y0 Output set point value �y Output error y Output for vector X state equations yk Output for vector xk state equations z Horizontal nodal displacement vector of an o�shore tower structure �k Unknown system inputs k Unknown observation inputs � Linear observation error vector ? Linear observation matrix � Symmetric nonsingular matrix of weighting factors rv ; rw Observational, system noise covariance matrices ! Linear observation vector � Azimuth angle of an inverted pendulum � Polar mass moment of inertia of the pendulum
vii
Chapter 3 Nomenclature
A; B; Cf C
fk fs
f
F (u(t)) Ff
g(u) gu g (X ; f ; t) G G(z ?1 ) J (a) J (u)
K
mi
M
n r se sp T u(t)
u
�u
w x_
x; x_ ; x xf X
�y
First and second order friction model matrices Structural damping matrix Kinetic dry friction force value Maximum or static dry friction force value Forcing vector First and second order model friction forces Coulomb and viscous model friction force Vector function in vector u state space model Jacobian of g with respect to u Vector function in vector X state space model Nonlinear structural matrix Discrete linear transfer function Quadratic cost functional Gauss-Newton approach least-squares functional Structural sti�ness matrix Nodal mass i Structural mass matrix Number of nodal degrees-of-freedom in the structure ARMA residual Elastic microdisplacement or break away distance of F (u(t)) from rest Plastic displacement or distance above which F (u(t)) is within 5% of fk Observation interval length Relative position of the sliding contact friction surfaces Augmented state vector in Gauss-Newton approach Input error System noise vector Relative velocity between to sliding surfaces Vectors of nodal displacements, velocities, accelerations First and second order friction model vector Augmented state vector in extended Kalman lter approach Output error
viii
Chapter 3 Nomenclature, Continued
�
Coulombic friction term parameter Viscous friction term parameter � Linear observation error vector ? Linear observation matrix � Symmetric nonsingular matrix of weighting factors ! Linear observation vector �i State variable function vector i
ix
Chapter 4 Nomenclature
a a0 b c C D e(t) f f (x; a) F (X ; f ) H (in)(t) J (x(n)) ki
K
m mi
M
Na Nx Nxa
P (n)(t)
rj T x; x x(t)
x(n)(t) X (t) �
�
Vector of unknown constant parameters in the nonlinear equations of motion True values for the unknown vector a Linear algebraic vector from cost functional minimization Initial condition for the state vector x(t) Augmented vector of initial conditions for the state vector X (t) Linear algebraic matrix from cost functional minimization Error between observed and generated state vector signals Applied forcing vector General nonlinear di�erential equation function Nonlinear di�erential equation function for modi ed Kabe model Homogeneous part of the recursive vector and associated with estimated parameter i Jacobian matrix of f (x; a) with respect to x(t) Sti�ness coe�cient i Structural symmetric sti�ness matrix Length of discretized observation signals Nodal mass i Structural diagonal mass matrix Dimension of the unknown parameter vector a Dimension of the state vector x(t) Combined Dimension of state and parameter vectors Particular part of the recursive vector x(n) (t) Residual between observed and generated position signals at mass i Length of continuous observation signals Vectors of nodal displacements, accelerations General continuous state vector Recursive estimation of the state vector x(t) Augmented state vector for modi ed Kabe model Nonlinear (cubic) sti�ness parameter Recursively estimated parameter vector Least-squares cost functional
x
Chapter 5 Nomenclature
A Ai Aie B (q?1 ) Cd Ci e(t) f1 F (q?1 ) Ff G(!) Ge (q?1 ) Gb(z ?1 ) Gee (q?1 ) i m nb nf Pd Pi0 Pui Pe q rcrit R L Ti Ti0 Tiu Vi0 Vin
Cross-sectional area of chamber ports Cross-sectional area of chamber i E�ective cross-sectional area of chamber port i Numerator of the output error model Chamber port discharge coe�cient (Cd = 0:85) Reduced analytic model coe�cients Error between acceleration residual and ltered friction signal Compressible ori ce ow function Denominator of the output error model Dry friction force (?Ff positive to the right) Frequency response from voltage input to load position output Dynamic lter with normalized Coulombic friction model parameter Discrete linear transfer function Dynamic lter or Ff to xr output error model Control volume or chamber index(i = 1; 2) Combined mass of piston rod and air bearing Order of B (q?1 ) Order of F (q?1 ) Absolute downstream pressure Absolute initial pressure of chamber i Absolute up stream pressure of chamber i Absolute exhaust and atmospheric pressure (Pe = 101 kPa) Delay operator Critical pressure ratio Ideal gas constant Piston stroke length Absolute temperature of chamber i Absolute initial temperature of chamber i Absolute up stream temperature of chamber i Initial Volume of chamber i, including dead air Servo valve voltage input signal
xi
Chapter 5 Nomenclature, Continued
W (!) x; x;_ x x^; x^ xf xr �
f �1 ; �2 �i � �1 (t) �2 (t)
Least-squares model t weighting function Position, velocity, acceleration of the load mass Non friction modeled load position, acceleration of the load mass Friction model signal with normalized Coulombic friction model parameter Load acceleration residual Coulombic friction term parameter Viscous friction term parameter Ratio of speci c heats( = 1:4 for air) Relative level of viscous to Coulombic friction during the friction fault Compressible ori ce ow constants Leakage coe�cient of chamber i Parameterization of the transfer function Gb(z ?1 ) Time-varying Coulombic friction term coe�cient Time-varying viscous friction term coe�cient
xii
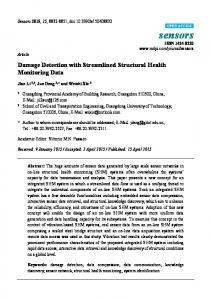
LIST OF FIGURES 1.1 Two-stage structure of the FDI process . . . . . . . . . . . . . . . . . . . . . . .
3
2.1 One Degree-of-freedom Shear Frame Model . . . . . . . . . . . . . . . . . . . . .
11
3.1 Qualitative Behavior of Friction Force F versus Position u . . . . . . . . . . . . .
27
4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 4.10 4.11 4.12 4.13
Kabe model of Space Antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Measurement of x6 (t) for Conditions of Table 4.7 and of No Added Noise . . . . Measurement of x6 (t) for Conditions of Table 4.7 and 10 % Added Noise . . . . . Measurement of x6 (t) for Conditions of Table 4.7 and 20 % Added Noise . . . . . Measurement of x6 (t) for Conditions of Table 4.7 and 50 % Added Noise . . . . . Continuity of Non Convergent Step Input Case in Table 4.5 . . . . . . . . . . . . Continuity of Convergent Step Input Case in Table 4.5 . . . . . . . . . . . . . . . Continuity of Initial Convergent Case in Table 4.4 . . . . . . . . . . . . . . . . . Continuity of Less Convergent Case in Table 4.4 . . . . . . . . . . . . . . . . . . Continuity of Non Convergent Case in Table 4.4 . . . . . . . . . . . . . . . . . . Higher Frequency for Non Convergent Step Input Case of Table 4.5 . . . . . . . . Lower Frequency for Convergent Sinusoidal Input Case of Table 4.5 . . . . . . . . Residual Measurements for Conditions of Case 1 of Table 4.1 and Fault in k4 Over the Entire Observed Responses (^x1 (t); :::; x^8 (t)). . . . . . . . . . . . . . . . . . . . 4.14 Residual Measurements for Conditions of Case 1 of Table 4.1 and Fault in k4 at t = 5 sec in the Observed Responses. . . . . . . . . . . . . . . . . . . . . . . . . .
32 42 43 44 45 46 47 48 49 50 51 52
5.1 5.2 5.3 5.4 5.5 5.6 5.7
57 59 60 61 61 62
5.8 5.9 5.10 5.11 5.12 5.13 5.14 5.15 5.16 5.17 5.18 5.19 5.20
Experimental Apparatus of an Air Bearing Mass with Pneumatic Actuation. . . Engineering Drawing of the Top Section of the Air Bearing Mass. . . . . . . . . . Engineering Drawing of the Bottom Section of the Air Bearing Mass. . . . . . . . Wide Frontal View of Experimental Precision Positioning Set Up. . . . . . . . . . Close Up of Frontal View of Experimental Precision Positioning Set Up. . . . . . Top Close Up View of Air Bearing Mass. . . . . . . . . . . . . . . . . . . . . . . . Amplitude and Phase Bode Plot of Voltage Input to Air Bearing Load Position Frequency Response G(!) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Amplitude and Phase Bode Plot of the Second Derivative of G(!) . . . . . . . . Frequency Response Match Between Measured Voltage to Acceleration and the Second Derivative of G(!) for a Chirp Input of Amplitude One Volts. . . . . . . Voltage Input to Up Stream Pressure Frequency Response . . . . . . . . . . . . . Change in Frequency Response of Voltage to Position for Chirp Signal Input of Varying Amplitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Change in Frequency Response of Voltage to Acceleration for Chirp Signal Input of Varying Amplitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Amplitude and Phase Bode Plot of Voltage Input to Air Bearing Load Position Frequency Response G(!) (dashed) and fourth-order model tted on the data Gb(z ?1) (solid) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Amplitude and Phase Bode Plot of the Second Derivative of G(!) (dashed) and Gb(z ?1) (solid) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Fault Sensitive Acceleration for Simulated Test Case 1 . . . . . . . . . . . . . . . Parameter Estimates, Thresholds and Signatures for Simulated Test Case 1 . . . Fault Sensitive Acceleration for Simulated Test Case 2 . . . . . . . . . . . . . . . Parameter Estimates, Thresholds and Signatures for Simulated Test Case 2 . . . Fault Sensitive Acceleration for Simulated Test Case 3 . . . . . . . . . . . . . . . Parameter Estimates, Thresholds and Signatures for Simulated Test Case 3 . . .
xiii
53 54
67 68 69 70 71 72 73 74 82 83 84 86 87 88
5.21 Measured Acceleration for Test Case 1 . . . . . . . . . . . . . . . . . . . . . . . . 5.22 Measured (dashed) and Modeled (solid) Accelerations, Pre- and Post-Fault for Test Case 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.23 Parameter Estimates, Thresholds and Signatures for Test Case 1 . . . . . . . . . 5.24 Measured Acceleration for Test Case 2 . . . . . . . . . . . . . . . . . . . . . . . . 5.25 Parameter Estimates, Thresholds and Signatures for Test Case 2 . . . . . . . . . 5.26 Measured Acceleration for Test Case 3 . . . . . . . . . . . . . . . . . . . . . . . . 5.27 Parameter Estimates, Thresholds and Signatures for Test Case 3 . . . . . . . . . 5.28 Acceleration Residual for Test Case 3 . . . . . . . . . . . . . . . . . . . . . . . . 5.29 Acceleration Residual (dashed) and Filtered Friction Model Signal (solid) for Test Case 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.30 Measured Acceleration for Test Case 4 . . . . . . . . . . . . . . . . . . . . . . . . 5.31 Parameter Estimates, Thresholds and Signatures for Test Case 4 . . . . . . . . . 5.32 Measured Acceleration for Test Case 5 . . . . . . . . . . . . . . . . . . . . . . . . 5.33 Parameter Estimates, Thresholds and Signatures for Test Case 5 . . . . . . . . . 5.34 Measured Acceleration for Test Case 6 . . . . . . . . . . . . . . . . . . . . . . . . 5.35 Parameter Estimates, Thresholds and Signatures for Test Case 6 . . . . . . . . . 5.36 Measured Acceleration for Test Case 7 . . . . . . . . . . . . . . . . . . . . . . . . 5.37 Parameter Estimates, Thresholds and Signatures for Test Case 7 . . . . . . . . . 5.38 Flow Diagram of Scheme for Fault Detection and Isolation of Dry Friction in a Precision Positioning Device. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106
A.1 Percentage of strain energy per spring per mode . . . . . . . . . . . . . . . . . . 110 A.2 Modal percentage of strain energy in k1 at m2 ; m3 ; m6 and m7 . . . . . . . . . . 110 B.1 Second Order Models for the Numerical Simulation of the FDI Scheme . . . . . . 113 C.1 Plot of Modeled (solid) and Measured (dashed) Mass Position Signals for a Given Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
LIST OF TABLES Convergence Results for Variable � with f5 = 1000 . . . . . . . . . . . . . . . . . Convergence Results for Variable � with f5 = 4000 . . . . . . . . . . . . . . . . . Convergence Results for Variable � with f6 = 1000 . . . . . . . . . . . . . . . . . Decrease in Time Step with f6 = 1000; � = 0:1 . . . . . . . . . . . . . . . . . . . Variable Time Step, f6 Input with I.G. = (150; 750; 7500); � = 10 . . . . . . . Variable Time Step and Initial Guess with f6 = 4000; � = 0:1 . . . . . . . . . . . Measurements (x3 , x6 , x8 ) Contaminated by Random Noise for f5 = 1000; � = 0:1 5.1 Dimensions and Properties of Components and Hardware . . . . . . . . . . . . . 5.2 Dry Friction Fault Detection Test Cases . . . . . . . . . . . . . . . . . . . . . . . 5.3 Dry Friction Fault Detection Test Cases . . . . . . . . . . . . . . . . . . . . . . .
4.1 4.2 4.3 4.4 4.5 4.6 4.7
xiv
38 38 39 39 40 40 41 58 85 85
ACKNOWLEDGEMENTS
I'd like to thank my advisor Prof. John Kosmatka for giving me the opportunity to come to UCSD to study and for helping me grow up as a student. I'd also like to thank Prof. de Callafon for his guidance and laboratory space and equipment in pursuing the experimental study of this thesis. Finally, I thank Prof. Krstic for his help in my course work and for being on my committee. I would be remiss if I didn't thank the Achievement Rewards for Collegiate Scientists (ARCS) and the Reuben H. Fleet Foundations for awarding and providing me with a fellowship, respectively, for the duration of my studies at UCSD. Also, I thank a NASA Training Grant from which my advisor augmented my nancial support. Lastly, I'd like to again thank the Reuben H. Fleet Foundation for a scholarship awarded to me in the Spring of 1999 through the AIAA student chapter at UCSD. I thank Chris Roman and Dan Schickle for their time and energy in helping me design and machine the experiment, as well as countless others who took an interest in designing the \ oating hockey puck", especially Prof. de Callafon. My family deserves many thanks and their support and love has meant a great deal to me. This thesis is dedicated to the memory of Michael Patrick Finch, the bravest man I've ever known and loved.
xv
ABSTRACT OF THE THESIS Damage Detection in Dynamic Systems with Nonlinearities by William Bruce Dunbar Master of Science in Engineering Sciences (Applied Mechanics) University of California, San Diego, 1999 Professor John B. Kosmatka, Chair
In general, damage detection can be described by the process of monitoring a physical dynamic (moving) system accompanied by con rmation and assessment of any degradation of system performance. This study is concerned with systems that contain nonlinearities in the dynamics that either pre-exist and/or result from some form of damage. Commonly, these systems are mathematically modeled and terms that are representative of a speci c fault are identi ed and monitored in a computer for detection. Health monitoring of dynamic systems for the detection of damage is an important practice in assessing performance of those systems and has a wide application range varying from structural and electro-mechanical systems to bio-medical systems. Although health monitoring of structural and bio-medical systems with nonlinearities has been largely untouched, there exist successful tools for monitoring nonlinear electro-mechanical systems, most of which come from system identi cation (SI) techniques. SI is concerned with deriving dynamic models of systems from experimentally obtained data. This thesis focuses on the application of SI techniques to a structural and an electro-mechanical system that contain nonlinearities. A numerical analysis of identifying linear terms and nonlinear terms (resulting from damage) in a structural system is investigated by applying a SI parameter estimation technique called quasilinearization. Also, an experimental analysis is performed to isolate and detect a dry friction fault in a high precision positioning mechanism. The designed fault detection and isolation scheme involves model tting, dynamic ltering and recursive parameter estimation SI tools. The high precision positioning mechanism is a servo pneumatic cylinder that drives a translational air bearing apparatus, designed to permit the addition of friction on-line. In the last several years, pneumatic cylinders have found wide application in electro-mechanical systems with precision positioning objectives.
xvi
Chapter 1
Introduction This thesis is concerned with detecting damage in a nonlinear structural system (by numerical analysis) and a nonlinear electro-mechanical system (by experimental analysis). The de nitions and motivation of detecting damage in these systems are di�erent. However, the formulation of the damage detection schemes applied here are common in that system identi cation (SI) techniques are utilized in both cases. Health monitoring of structural systems for the detection of damage is a critical practice in assessing the safety and service life of those structures. Yet, the application of health monitoring to structures that are modeled by nonlinear di�erential equations has not been adequately treated, even though many real structures exhibit nonlinear behavior prior to, or as a result of, the occurrence of a fault. To detect damage in a structural system with nonlinearities, a reliable model of the system dynamics must be obtained. Fault generally refers to a reduction in the sti�ness values that parameterize the model. For a given model of a structural system, the following subsequent steps are involved in detecting damage: 1. Detect a change in expected system operating conditions. 2. Locate where the damage occurred in the system. 3. Estimate the reduction in sti�ness in the damaged element. 4. Perform a structural analysis (e.g. nite element) and determine whether the damaged system is safe by design requirements or estimate the remaining life. In the areas of monitoring ground and space structures with linear models, particularly in the aerospace eld, the problem of detection, location, and estimation (DLE) of structural damage (steps 1 - 3) has been extensively treated as discussed in [1]. Modal data is often used
1
2 for model identi cation and damage monitoring, where damage is commonly characterized as a change in sti�ness. However, these tools of DLE do not extend to nonlinear structures. In this study, the de nition of damage in a structural system is expanded. Henceforth, a structural fault refers to the possibility of hardening or softening of a structural spring, which also may remain linear or become nonlinear as a result of the damage. Alternatively, fault detection and isolation (FDI) is the name for the subject as it relates to electro-mechanical systems [2] where automation or control is used and linear and nonlinear models are employed. In this realm, fault may occur in the actuators, the components of the system and/or the sensors. It is the goal of FDI techniques to detect and isolate (locate) faults and compensate for them to ensure the success of the control objective. This study does not investigate or employ any type of control. However, the SI techniques employed in model based FDI schemes can be applied to nonlinear systems for fault detection and isolation without the need for control. Traditionally, hardware redundancy FDI schemes were used to diagnose faults by implementing physically redundant sensors, actuators and/or components and comparing the redundant signals for consistency. The modern analytical redundancy FDI schemes are distinguished from the hardware redundancy schemes in that they numerically generate faultless signals which serve as the redundant signals for comparison to the measured signals. The redundant signals are numerically generated by formulating a dynamic model of the process to be monitored and applying the same input to the model that the process is subjected to. These schemes \are basically signal processing techniques employing state estimation, parameter estimation, adaptive ltering, variable threshold logic, statistical decision theory, and various combinatorial and logical operations, all of which can be performed (in modern computers)..." ([2], p.4). The processed output measurements from sensors that represent a di�erence between no fault and fault cases are called residuals. The signature of the residual is the enhanced characteristic that the residual displays in the presence of failure. In the absence of failure, the residuals should be unbiased and the signature is typically the presence of a residual bias. In this realm, robustness is de ned as the minimization of sensitivity of detection performance to model errors and uncertainties. Following the generation of residuals, the statistical hypothesized faults are calculated and a decision making test is applied to these statistics. This two-stage structure of the FDI process discussed above is given in [3] and shown in Figure 1.1. SI techniques are concerned with deriving mathematical (dynamic) models of systems based on observed data from the systems [4]. As such, the tools of SI have been extensively used in analytical redundancy FDI schemes for detecting and isolating faults in nonlinear dynamic systems. Within SI there are parametric and nonparametric methods of modeling [5], [6].
3
residuals
sensor outputs
RESIDUAL GENERATION
Robust Residual Generation
CALCULATION OF DECISION STATISTICS
decision statistics
failure decision DECISION
High Performance Decision Process
Figure 1.1: Two-stage structure of the FDI process Parametric methods seek to identify a pre-parameterized model of the system and the parameter values in that model. Nonparametric methods are designed to determine a functional or qualitative representation of the signals observed from the system to be identi ed. This study is concerned with parametric methods of modeling as they are more widely applied for damage detection and simpler to apply, particularly in highly nonlinear systems [7]. Within parametric methods, a modeling distinction can be made between black box and gray box modeling [4]. Black box models do not exhibit a physical interpretation of the system to be modeled. As such, black box models are t to data by adjusting parameters in a pre-determined parameterization that is assumed to capture the relevant dynamics of the system to be identi ed. Gray box models contain adjustable parameters that do have a physical interpretation and the parameterization is determined by the physical interpretation of the parameters to be identi ed. The way in which the black box models are parameterized determines the name of the model being used. This thesis applies ARX (autoregressive with exongeneous input) and OE (output error) black box models [4]. In both gray and black box modeling a model structure is obtained and the parameters in the model need to be identi ed. The methods for parametric identi cation of these models include direct approaches, perturbation techniques, quasilinearization, Markov modeling, and ltering and estimation methods [8], [6], [7], [9]. Filtering and estimation techniques include least-squares, maximum likelihood, and Bayesian estimation. Most of these tools have found application in identifying parametric models of nonlinear structural and electro-mechanical systems. More importantly, some of the techniques above have been or can be applied to health monitoring of structural and electro-mechanical systems for the detection of damage.
4
1.1 Literature Review Damage detection in dynamic systems with nonlinearities requires identi cation of a model of the system followed by monitoring of fault sensitive measurements for detection. The literature related to structural systems deals either with both model identi cation and damage detection in linear systems or strictly model identi cation of systems with nonlinearities, with far more literature that is current in the rst area. On the other hand, there are many papers that address FDI in nonlinear electro-mechanical systems. The identi cation and damage detection of ground and space structural systems with linear models has been extensively treated with modal tools. Kabe [10] used measured mode data to identify and adjust the sti�ness matrix in the modeling of a severe test case space antenna structure. Potential damage can be located and estimated using a weighted sensitivity analysis that accommodates mass and sti�ness uncertainty, as investigated by Ricles and Kosmatka [11]. Papadopoulos and Garcia [1] used modal information and apply a statistical approach to identify structural damage. Modal tools parametrically identify linear structures while keeping the physically based model structure in tact. However, these tools do not have an analog in nonlinear systems. Natke and Yao gave a brief investigation of SI approaches for structural damage evaluation in linear civil engineering structures [12]. The application of SI tools to the identi cation of a nonlinear structure dates back as early as 1975 [9]. In this paper by Distefano and Rath, parameters associated with a numerically generated nonlinear response were identi ed for one degree-of-freedom structural systems subject to seismic conditions. These systems were extensively treated numerically by the direct method of estimation, a ltering approach and a Gauss-Newton approach. Since then, the appearance of papers that investigate the identi cation of nonlinear structural systems using SI techniques has been sporadic. Nayfeh introduced a self-contained perturbation approach that proposes experimental techniques of identifying low degree-of-freedom dynamic systems that contain smooth nonlinearities [6]. The techniques exploit nonlinear resonances and compares the known systems behavior to the parameterized model to be identi ed. In this way, the model can be parameterized to qualitatively match the physical system under chosen excitations. Further, for an assumed mathematical model of a two-degree of freedom structure that contains quadratic and cubic restoring terms, an experimental parameter identi cation approach is given. The method requires an increasing number of experiments, under excitation of the multiple subharmonics, for identi cation of models of increasing nonlinearity and degrees of freedom. For higher order parameters to be identi ed, redundant measurements are required with the application of least-squares or maximum likelihood estimations.
5 Hanagud et al. [13] expanded the solution to a nonlinear one degree-of-freedom system by perturbations (method of multiple scales) and identi ed the parameters by requiring only the measurement of one state variable, e.g. acceleration or position. Although good for high noise levels, success was obtained only for small nonlinearity and the solution was accurate to the order of �, the small quantity that parameterized the nonlinearity. For higher degrees of freedom or levels of nonlinearity, iterative direct approaches were recommended in this study. Imai et al. gave an extensive study of parametric identi cation of linear and nonlinear structural systems using least-squares, maximum likelihood and extended Kalman ltering in 1989 [14]. There exists a need therefore to extend SI techniques to the parametric identi cation of structural systems with nonlinearities for damage assessment. Few papers discuss gray box modeling approaches for FDI in nonlinear electro-mechanical systems. Zell and A. Medvedev applied a model-based technique for fault detection and isolation that was speci c to systems that utilize rotational induction machines [15]. Shields et al. applied a nonlinear fault detection method for a bilinear hydraulic system [16]. The modeling error served as the residual used in detection. However, only numerical success was provided and the method was generalized for bilinear systems only. Both of these papers identi ed analytic models that were not highly nonlinear and success was given under conditions of numerical simulation. The higher the order and the greater the degree of nonlinearity in a process, the more di�cult it becomes to apply gray box modeling techniques to the process. This is because the more nonlinear a process is, the more di�cult it is in general to identify a reliable model structure to represent the process. Even when these models are available, there remains the di�cult task of identifying multiple, and often obscure coe�cients that parameterize the models. A more common approach of identi cation and fault detection is to apply black box modeling techniques. Ho ing and Deibert [17] combined parameter estimation techniques and the parity space approach to a class of nonlinear processes with mainly constant input signals. Their approach required knowledge of the dynamic model order and the static nonlinear characteristic curve related to a owrate control with a pneumatic driven valve. The experiment validated the proposed on-line fault detection with small signal models. Other studies linearize the nonlinear equations that model an electro-mechanical system and apply an extended Kalman lter and decision statistics. This approach was taken by Nowakowski et al. [18] and Gomez and Unebehauen [19], with experimental validation in the latter. Other methods apply the modern techniques of nonlinear control, in the form of nonlinear observer schemes, to perform fault detection and isolation [20], [21], [22]. Caccavale and Walker [22] applied an observer-based fault detection algorithm for a robot manipulator application. The on-line approach designs a discrete time nonlinear observer of the systems outputs, joint posi-
6 tion and velocities. The issue of robustness with respect to unknown dynamics and discretization errors was addressed by adding linear feedback of the observer error and a delayed nonlinear compensation action. Numerical simulations showed good results in detecting and isolating sensor and actuator failures, even in the presence of large modeling errors. This study involves the application of a servo controlled pneumatic cylinder and a brief review of their use in industry and the current need for friction fault detection is now given. Pneumatic cylinders are air driven actuation devices, where the air is regulated by some type of voltage controlled valve [23]. These cylinders have been in use as early as 1969 [24] and are in increasing use in industry in electro-mechanical systems with precision positioning objectives [25], [26]. High payload-to-weight and payload-to-volume ratios, high speed and force capabilities give them an advantage over electric actuators. The availability and cost of supply air makes them signi cantly more cost e�ective. The high degree of compliance due to compressibility of air makes pneumatic cylinders capable of dexterous manipulations. This in term makes them more applicable to representing human characteristics, as they do in rehabilitation and prosthetic applications. Pneumatic cylinders are used in agricultural robotic drive systems as they are cleaner in maintenance and leakage than hydraulic actuation [27]. However, \unlike conventional electrically powered manipulator dynamics which are generally of second-order, the pneumatically powered manipulator dynamics are characterized by high-order dynamics, typically of third or fourth order" ([28], p.666). Moreover, the presence of dry Coulombic friction in these actuators is a chief obstacle in automated systems that require precision positioning. This dry friction phenomena can interfere with the precision positioning objectives and cause problems like overshooting and force limit-cycling [29]. Currently, \the lack of available straightforward, well-de ned techniques for the identi cation of such nonlinearities (as dry friction) in actual plants (has) emerged as a tough problem," according to Hatipoglu and Ozguner ([30], p.2133). Most papers that addressed the compensation of friction in pneumatic actuator applications [25], [28] do not apply identi cation tools. According to Johnson and Lorenz, \...because of its nonlinear nature, friction is often neglected or inadequately compensated by conventional controllers" ([31], p.1392). They used state feedback controller errors to iteratively identify the functional form of friction and the parameters therein in a robotic gripper application. The unmodeled e�ects, such as friction, appear as state errors in the controller. The nonparametric friction model was then used for feedforward or feedback compensation to achieve a tracking objective and reject disturbances. Although friction can be compensated by modern control algorithms such as this, sudden and unpredictable changes in friction due to, for example, added wear and side loading in a precision positioner cause unacceptable behavior of the positioning mecha-
7 nism. Therefore, there is a need for a friction FDI scheme in precision positioning applications, such as pneumatic cylinder positioning devices. In considering the identi cation of friction for detection, parametric modeling techniques in the literature are reviewed. The topic of modeling friction spans the subjects of control theory, mathematical physics, tribology, lubrication science and even extends to the science of earthquake dynamics. A most extensive treatment of friction models and types of compensation for uid lubricated metal on metal junctions was given by Armstrong-Helouvry et al. [32]. The paper by Lim and Chen was geared toward the numerical study of the friction mechanism in earthquakes models [33]. As a subset, there exist numerous investigations of modeling stick-slip behavior of dry Coulomb friction, which is of interest in precision positioning applications. In [34], Bliman and Sorine designed simple rst and second order models for use in control applications. Both models were uniquely and nonlinearly parameterized by physically meaningful terms that can be identi ed from experiment. The modeling in the controls literature focuses particularly on the low velocity sticking behavior, as this is the chief obstacle to precision control. In [35], Dupont utilized the tribology literature and applied a stick-slip friction model that depends upon the history of motion. This study was concerned with very low velocity proportional-derivative (PD) control, for which stickslip phenomena can plague the control objective with problems like overshooting and force limitcycling. This was expanded on with experiments in [29]. Dupont examined a state variable model and a time-delay model of friction to achieve steady, low velocity motion with PD control. Both models were experimentally based, nonlinear in the parameters and identi cation proceeds from steady-state friction-velocity curves. The former model was designed to represent stick-slip friction for large velocity ranges and the latter model to represent low velocity ranges. Experimental identi cation of friction and its compensation in precise, position controlled mechanisms was also investigated by Johnson and Lorenz [31]. Their approach was di�erent in that a parameterized model of the friction force was identi ed from the loop errors in a state feedback motion controller. Signal processing was used to isolate the errors as functions of the states and the physical relationship between friction and the spatial states (e.g. position, velocity) were used to formulate the model structure. The approach was experimentally validated in a robotic gripper application. In the low velocity regime, friction has been experimentally observed to contain sti�ness and damping properties [36]. Haessig and Friedland in [37] gave a comprehensive study of ve di�erent friction models, all compared by numerical simulations. The reset integrator model, an extension of the Karnopp approach [38] is parameterized by a nonlinear coe�cient that depends
8 on velocity and a method of identi cation was described. Also, a more physically based bristle model was investigated. These models require peak sticking and sliding friction values for parameter identi cation and most of the models are parametrically nonlinear. In most cases, the models had some experimental validation. The studies by Bliman and Sorine [34] and Dupont [35] provided experimentally valid friction models. However, as these models are parametrically nonlinear, identi cation must be performed o�-line and by possibly multiple experimental observations. Other studies examined friction models for simulation of dynamic processes in which friction was a signi cant factor [37], [38]. However, for the purpose of identi cation and detection of friction in an on-line application these models are di�cult. Most of the models are computationally ine�cient, and the nonlinear parameterization makes identi cation more cumbersome.
1.2 Thesis Outline A need exists for the parametric identi cation of models of structural systems with nonlinearities, where the identi cation can be considered as damage assessment of that structure. Further, the extension of health monitoring of that system for structural fault detection is desirable and can be investigated by examining the tools of system identi cation. Monitoring these types of structures is critical in evaluating their safety and service life expectancy. A need has also been expressed for a dry friction fault detection technique in a precision positioning application, as dry friction phenomena can interfere with the precision positioning objectives. Although friction can be compensated by modern control algorithms, sudden and unpredictable changes in friction due to, for example, wear and side loading of a pneumatic cylinder cause unacceptable behavior of the positioning mechanism. An on-line detection of dry friction (fault) would greatly facilitate the compensation of dry friction in high precision positioning. Moreover, a fault detection and isolation technique for monitoring dry friction would help the detection of changing process conditions in the case of, for example, wear and excessive side loading of a pneumatic cylinder. This thesis contains the following steps in addressing these needs
� Review methods of parametric identi cation of structural system models with nonlinearities. Also, discuss these approaches as they relate to damage assessment and detection of new structural faults to the system.
� Select and numerically investigate a parameter estimation approach for the assessment of
structural damage in a space antenna model with nonlinearities and discuss the use of this approach in identifying and estimating new structural faults.
9
� Review methods of Fault Detection and Isolation (FDI) in nonlinear electro-mechanical systems. Discuss the modeling of friction and identi cation of friction as a fault in precision positioning applications.
� Design a fault detection and isolation scheme for isolating Coulombic friction and detecting a fault of this type in a precision positioning application.
� Provide numerical and experimental validation of the FDI scheme. The mathematical approaches related to damage detection in structural and electro-mechanical systems with nonlinearities are in discussed in Chapter 2. Chapter 3 investigates these approaches as alternatives in the numerical and experimental analyses examined here. A parametric identi cation method developed by Richard Bellman ([40], [8]), called the quasilinearization parameter estimation method, is applied to a nonlinear structural system o�-line in Chapter 4. The structure is a space antenna model, studied by Kabe in [10], that is modi ed by a structural fault in the form of an added nonlinear spring. Multiple simulations are performed to numerically identify three unknown sti�ness parameters; two that accompany linear terms and one that accompanies the nonlinear term. A discussion of extending the method to detecting additional structural faults is also given. In Chapter 5 a scheme for isolating and detecting dry friction in a precision positioning application is described. The scheme is validated numerically and successfully applied to a designed precision positioning experiment. In the experiment, the precision positioner employed was a servo pneumatic cylinder. The cylinder was used to actuate an air bearing mass apparatus that was designed to permit the addition of friction on-line. Adding the friction represents an increase in the translational Coulomb friction that pneumatic actuators exhibit under conditions of an internal friction fault, i.e. added wear and side-loading of the piston and rod mechanism inside the cylinder.
Chapter 2
Mathematical Approach Three of the parametric identi cation tools applied to nonlinear structural systems with known models that were discussed in the literature review are mathematically expanded upon here. Two current approaches of FDI in nonlinear electro-mechanical systems are also given more rigorous mathematical descriptions.
2.1 Methods of Parametric Identi cation of Nonlinear Structural System Models for Damage Detection Distefano and Rath investigated the parametric identi cation of one degree-of-freedom structural system [9]. Consider the single degree-of-freedom shear frame in Figure 2.1 and let x(t) be the displacement at the top of the shear frame. The assumed equation of motion of this structure by Newton's second law is
m (x + x0 ) + h(x; x;_ a) = p(t);
(2.1)
where x0 is the displacement at the base, m is the mass, h(x; x;_ a) denotes the elastic and inelastic restoring forces parameterized by the unknown vector a and p(t) is an external force. The modeling problem remains of identifying the structure of the function h. The simplest model is a linear function of displacement and velocity
h(x; x;_ a) = a1 x + a2 x:_
(2.2)
However, this model does not capture the nonlinear responses observed in structures that are subjected to seismic loading, which are the loading conditions of interest in the study. a simple
10
11
Figure 2.1: One Degree-of-freedom Shear Frame Model extension to nonlinear modeling, they pose the smooth nonlinear restoring term h(x; x;_ a) = a1 x + a2 x3 + a3 x_ + a4 x_ 3 :
(2.3)
The objective of the study focuses on the parametric identi cation of this model, with a subsequent discussion that addresses the ability of such a model as this to predict observed nonlinear responses in real structural systems. The simplest method of parametric identi cation is the direct approach, which requires measurements of acceleration and knowledge of the forcing term. An example of applying this approach is given for the system mx + a1 x + a2 x3 + a3 x_ + a4 x_ 3 = p(t); (2.4) where p(t) is the known forcing term and the acceleration x is observed over the interval (0; T ). The parameters ai can be estimated by minimizing the quadratic functional ZT ? � mx + a1 x + a2 x3 + a3 x_ + a4 x_ 3 ? p(t) 2 dt; (2.5) J (a) = 0 where T is the record length. The measured displacement x and velocity x_ are obtained by integrating the measured acceleration. Minimization of J (a) requires the solution of the linear algebraic equations
Aa = b; a = fa1; a2; a3; a4 g; where the symmetric matrix A and the vector b are given by ZT ZT
(p ? mx) hi dt; hi hj dt; bi = 0 0 and h1 = x; h2 = x3 ; h3 = x;_ h4 = x_ 3 :
Aij =
(2.6) (2.7) (2.8)
12 The quantities aij and bi can be found by solving the di�erential equations dAij = h h ; A (0) = 0; i j ij dt dbi = (p ? mx) h ; b (0) = 0: i i dt
(2.9) (2.10)
The simulations provided revealed that although computationally e�cient, the method required very accurate acceleration measurements. As the noise level on the measured accelerations increased, the method deteriorated. Also investigated were a ltering approach and a Gauss-Newton approach, which belongs to the general family of the quasilinear methods. These approaches took a more general approach to the parametric identi cation of dynamic models of the form of Equation 2.1. Writing the model in state-space form and augmenting the state vector with the unknown parameter vector a yields
u_ = g(u)
(2.11)
where the augmented state vector u, with initial condition vector u(0), and the vector function g are given by
u = �fx; x;_ a1; :::; ak g ; � 1 1 g = x;_ ? m h ? x0 + m p; 0; :::; 0 :
(2.12) (2.13)
A linear observation error is assumed as
! = ?u + � ;
(2.14)
where ? is a rectangular matrix and � is the observation error vector. The least-squares functional takes the form
J (u) =
ZT
(! ? ?u; ! ? ?u) dt + (u(0) ? u0 ; � (u(0) ? u0 )) ; (2.15) 0 where u0 is the best a priori estimate of u(0) and � is a symmetric nonsingular matrix of weighting factors that represents the degree of con dence in such an estimate. The inner product vector operation is denoted by parentheses in these equations. The problem of nding the vector function u(t) over the interval (0; T ) that satis es the di�erential constraint in Equation 2.11 and such that Equation 2.15 is a minimum is an optimization problem. The estimation of the unknown parameters a is now contained in the optimization, which seeks the displacement x and velocity x_ as well. As the state u(t) is uniquely determined by Equation 2.11 throughout the interval (0; T ), the optimal state can be found at any point in time in this interval. Typically the problem is formulated to nd that optimal state at one of the two ends of the interval, i.e. at u(0) or at u(T ).
13 The optimal value of u(T ) that satis es the di�erential Equation 2.11 and minimizes the error functional in Equation 2.15 is called the optimal least-squares lter of the state u in [9]. The other formulation, i.e. estimating the optimal state u at t = 0, is a problem that can be solved by a variety of methods. The study investigated a solution to this optimization problem by the Gauss-Newton approach, a technique that is derived from the family of quasilinear methods. This method is expanded upon here as it is simpler to apply than the ltering approach and yielded better accuracy in the simulation results given in the study. Take u(0) = c and the problem formulation becomes the determination of c such that Equation 2.15 is minimized and u satis es Equation 2.11. So, u that satis es Equation 2.11 depends upon the initial condition c, i.e.
u(t) = u(c; t):
(2.16)
The linear expansion of u(c; t) about an estimate of c, denoted as c0 gives
u = u0 + uc�c;
(2.17)
where u0 represents u(c0 ; t), uc is the Jacobian matrix with elements @u0i =@cj and �c is the increment of the estimate c0 de ned as �c = c1 ? c0 ;
(2.18)
and c1 is the improved estimated value of c. The substitution of Equation 2.17 in Equation 2.15 yields
ZT ? � ?u0 + ?uc �c ? !; ?u0 + ?uc �c ? ! dt ?u0 0(0) + u (c0 ; 0)�c ? u ; � ?u0(0) + u (c0; 0)�c ? u �� : c 0 c 0
J (�c) = +
(2.19)
The new quadratic functional in Equation 2.19 can be minimized to yield the desired �c. This minimization requires that
ZT
ucT ?T ??u0 + ?uc�c ? !� dt + uc(c0; 0)T � ?u0 (0) + uc(c0; 0)�c ? u0� = 0;
(2.20)
A�c = b;
(2.21)
0 giving the linear algebraic equation in �c that can be written as
where A and b are given by
ZT A = ucT ?T ?uc dt + uc(c0; 0)T �uc(c0; 0); Z 0T � � ucT ?T ?u0 ? ucT ?T ! dt + uc(c0; 0)T � ?u0(0) ? u0� : b= 0
(2.22) (2.23)
14 Taking derivatives in the constraint di�erential Equation 2.11 yields the sensitivity equations duc = g u ; u c dt
2 uc(c0 ; 0) = 4 I 2
3
05 ; 0 0
(2.24)
where the matrix gu is the derivative of g (u) with respect to u and the Jacobian matrix uc is found by integrating Equation 2.24. The identity matrix I 2 is order two for the one degree-offreedom problem of interest. As shown before, the matrix A and vector b can found by integrating the di�erential equations (again found by taking derivatives) dA = u T ?T ?u ; A(0) = u (c0 ; 0)T �u (c0 ; 0); c c c c dt db = u T ?T ?u0 ? u T ?T !; b(0) = u (c0 ; 0)T � ?u0 (0) ? u � : c c c 0 dt
(2.25) (2.26)
The solution to the original optimization problem is found by integrating the initial value systems in Equation 2.24 - Equation 2.26 and solving the system linear algebraic equations
A(T )�c = b(T ):
(2.27)
One step of this process produces the new estimate for c, i.e. c1 , and the process can be iteratively performed until convergence of the parameters a is achieved, if they converge at all. Numerical simulations of the direct and Gauss-Newton approaches were performed on the one degree-of-freedom structural model
?
�
x = ? m1 a1 x + a2 x3 + a3 x_ + a4 x_ 3 + m1 p(t):
(2.28)
For assumed known parameter values
a1 = 25; a2 = 2:5; a3 = 1; a4 = 0:1;
(2.29)
x(0) = 0; x_ (0) = 0;
(2.30)
and initial conditions
the system was excited (p(t)) using the North-South El Centro earthquake recorded accelogram signal and di�erent levels of uniformly distributed random noise was implemented to corrupt one of the measured signals x, x_ or x. The application of the Gauss-Newton approach showed good robustness with respect to noise in the acceleration measurement when observing both the position and velocity signals in the estimation equations. The weighting matrix � was set to unity in these results. The approach achieved higher accuracy than the other two methods for greater computational time.
15 Imai at el. [14] numerically examined an idealized nonlinear two degree-of-freedom model of a xed o�shore tower subject to wave forces (M 0 + C m ) z + C z_ + K 0 z = C m v + C d (v_ ? z_ ) jv_ ? z_ j
(2.31)
where z is the vector of horizontal displacement, v_ and v are the horizontal wave particle velocity and acceleration vectors, M 0 , C and K 0 are the matrices of structural mass, damping and sti�ness, and C m and C d are diagonal matrices containing, respectively, the inertia and drag coe�cients associated with the wave force acting on the structure. Simplifying this model gives where
z + J z_ ? D f(v_ ? z_ ) jv_ ? z_ jg + Kz = Lv; J = [M 0 + C m]?1 C ; D = [M 0 + C m]?1 C d; K = [M 0 + C m]?1 K 0; L = [M 0 + C m]?1 C m:
(2.32) (2.33)
The model is transformed into state-space form and the state vector is augmented with the unknown hydrodynamic coe�cients, given by
X = fz1; z2; z_1; z_2; J11 ; J21 ; J12 ; J22 ; D11; D22 ; K11; K21 ; K12 ; K22 ; L11 ; L22gT :
(2.34)
The displacement measurements of the two discrete masses z1 and z2 are assumed available. An extended Kalman lter with a weighted global iteration procedure is applied to estimate the unknown parameters. The extended Kalman lter algorithm is a recursive process for estimating the optimal state of a nonlinear system based on observed data for the input (excitation) and output (response) [4]. The design of such a lter without the extension to weighted global iterations can be summarized as follows. A continuous state equation with an input uin can be written as
X (t) = g (X ; uin; t) + w(t);
(2.35)
with a discrete observation vector de ned at time t = k�t as
y(k) = HX (k) + v(k): (2.36) The vector X (k) is the state vector at t = k�t, v(k) is the observational noise vector with covariance rv , w(k) is the system noise vector with covariance rw and H is the state to observation matrix. The algorithm provides a predicted state X (k + 1=k) that evolves according to
X (k + 1=k)
= E fX (k + 1)jy(1); y(2); :::; y(k)g Z (k+1)�t = X (k=k) + g (X (t=k); u; t) dt; k�t P (k + 1=k) = �(k + 1; k)P (k=k)�(k + 1; k)T + rw ;
(2.37) (2.38)
16 where P (k + 1=k) is the corresponding error covariance matrix, E fAjB g is the expected value of A conditional to B , and the state transition matrix �(k + 1; k) is obtained by the approximation (for small �t)
� @ g(X (t); t) � X (t) = X (k=k): (2.39) @X Now, the ltered state X (k + 1=k + 1) and its error covariance matrix P (k + 1=k + 1) can be �(k + 1; k) � I + �t
estimated as
X (k + 1=k + 1) P (k + 1=k + 1)
= E fX (k + 1)jy(1); y(2); :::; y(k + 1)g = =
X (k + 1=k) + K (k + 1) [y(k + 1) ? HX (k + 1=k)] ; [I ? K (k + 1)H ] P (k + 1=k) [I ? K (k + 1)H ]T + K (k + 1)rv K (k + 1)T ;
(2.40) (2.41)
where K (k + 1) is the Kalman gain matrix de ned as
i?1 h K (k + 1) = P (k + 1=k)H T HP (k + 1=k)H T + rw :
(2.42)
The application of this lter with weighted global iteration to the augmented state-space model with vector de ned in Equation 2.34 was numerically examined. Note that in the application of this approach the measurement and system noise vectors and their corresponding covariance matrices are assumed known. The results of four di�erent simulations, estimating 12 parameters under two di�erent wind speed and noise level cases, showed moderately good estimates. Half of the estimates were within 2 signi cant digits of the assumed exact values and the rest were even less accurate.
2.2 Methods of Fault Detection and Isolation in Nonlinear Electro-Mechanical Systems In this section, two current approaches of FDI in nonlinear electro-mechanical systems are described in greater mathematical detail. Ho ing and Deibert developed estimation of parity equations in a nonlinear electromechanical system [17], where parity equations are a method of computing residuals (see [3]). Speci cally, they designed an FDI approach for a class of nonlinear processes that have mainly constant input signals. Finally, the scheme is applied to a owrate control with a pneumatic driven valve. An overview of this FDI scheme and it's application to the valve experiment is overviewed here.
17 The authors assume that the process inputs change merely step-wise or vary slowly in a small band around an operating point, thereby justifying tting a linear model to the nonlinear process. The process knowledge that was assumed known is an idea about the dynamic model order. A proper linear discrete transfer function model for known model order 3 takes the form (z ?1 ) = b1 z ?1 + � � � + b4 z ?4 G(z ?1 ) = B (2.43) A(z ?1 ) 1 + a1 z ?1 + � � � + a4 z ?4 where the parameter b0 was set zero to reduce the number of parameters for identi cation and since the lowpass character assumption presumes no jump discontinuities in the process. Leastsquares was used to estimate the parameters for a given operating point and a parity space was generated for that setpoint. Once the set point changes, as detected in the parity space, a new set of parameters were estimated and a new parity space was generated corresponding to the new set point for detection of more faults. So, the system toggles between parameter estimation and parity space for detection of faults, as explained in the following discussion. A static nonlinear characteristic curve of the process was also assumed to be known. In this way the small signal input and output variables can be generated as
u = U ? U00 ; y = Y ? Y00
(2.44)
where U and Y are the current input and output variables and Y00 = fNL(U00 ) ts the nonlinear static map. These signals indicate that the set point change has occurred and are therefore sensitive to faults. These signals were used to exclude the e�ects of the fault from the post-fault parameter estimation, i.e. when u and y were \small" again after a fault, the new process model parameters were estimated. The model parameters were estimated by least-squares over a selected window of data. When possible, each estimation is performed in one shot by applying a small excitation in the set point, e.g. two small step inputs. If the process cannot be arti cially excited in this way, an interval at a speci ed time after the fault and a window around that time is selected as the window of estimation. The time is selected as the moment at which the output Y does not leave a speci ed settling threshold. Estimation in this case provides the poles of A(z ?1 ) and the zeros of B (z ?1 ) were assumed to reduce to one parameter, i.e. b1 . This parameter was identi ed using the estimated poles and the static gain, computed with the poles and static map. Autoregressive moving average (ARMA) and moving average (MA) parity equations were used and compared to generate the residuals for fault detection. The ARMA residual equation takes the form
RAMRA = y(z ?1 ) ? G(z ?1 )u(z ?1);
(2.45)
18 and the MA residual is given by
RMA = A(z ?1 )y(z ?1 ) ? B (z ?1)u(z ?1 ):
(2.46)
Recall that the small signal models in Equation 2.44 are sensitive to faults. In the presence of a fault, consider similarly the perturbations on the input and output signals
u = u0 ? �u; y = y0 ? �y;
(2.47)
where (u0 ; y0 ) is the current operating point and (�u; �y) represents the input and output errors. The parity or residual equations in the event of a fault become
RARMA = �y(z ?1 ) ? G(z ?1 )�u(z ?1);
(2.48)
RMA = A(z ?1 )�y(z ?1 ) ? B (z ?1)�u(z ?1 );
(2.49)
and
where �u(z ?1) and �y(z ?1 ) are the discretized input and output error signals, respectively. The residuals were both normalized and detection occurred when the residuals jumped out of the �1 window. Note that these two types of residuals, although sensitive to faults in the same way, react di�erently in the event of di�erent faults. To see this, observe that if the fault signals �u and �y are constant, the residuals deviate di�erently as
RARMA = �y ? G(1)�u;
(2.50)
RMA = A(1)�y ? B (1)�u:
(2.51)
and
To di�erentiate smaller unmodeled e�ects from signi cant faults, adaptive thresholds were applied to these residuals. The adaptive threshold generation included a lead-lag lter that required the estimation of four parameters. Further, the threshold computation was discretized to reduce computational costs and speed up the time of detection. The scheme was experimentally applied to a third-order owrate control pilot plant controlled by a pneumatic driven valve. Note that the requirements for the scheme were knowledge of the process input, output, dynamic model order and a static nonlinear map of the process. Faults in the sensors and concerning the given static gain were implemented. These faults affect the modeled output and modeled setpoint, respectively, but do not a�ect the experiment directly. Rather, the faults are simulated under experimental conditions. The application shows good detection results but no distinction between the two di�erent fault types. Further, the use
19 of adaptive thresholds seems redundant as a �1 window was applied to the residuals for detection of the simulated faults. Nowakowski et al. [18] investigated FDI using an extended Kalman lter with a statistical test for detection. The approach was applied numerically to a nonlinear model of an inverted pendulum, given as �� + C �_ ? Mp lg sin � + Mp lxc cos � = 0 � � M xc + Fx x_ c + Mp l � cos � ? (�_)2 sin � = F
(2.52) (2.53)
where Mp ; l are the mass and length of the pendulum, M is the mass of the cart and pendulum, xc and � are the cart translational position and pendulum azimuth angle, respectively, and F is the input force. The nonlinear equations were linearized and discretized. In the general case, the linear discrete dynamical system a�ected by unknown inputs or failures is described by the equations
xk+1 yk
= =
Axk + Buk + F�k + wk Hxk + G k + vk
(2.54) (2.55)
where xk , uk and yk are the state (of dimension n), known input and measured output vectors respectively and the �k and k represent unknown inputs. As before, wk and vk are the state and measured output noise vectors. By augmenting the state with the unknown inputs, the system can be written as
E x� k+1 yk where
= =
Ab x� k + Buk + wk C x� k + vk
� � � � bA = A ... 0 ... 0 ; E = I n ... 0 ... ? F ; 2 3 x � . . � 66 k 77 . . C = H . G . 0 ; x� k = 64 k 75 : �k?1
(2.56) (2.57) (2.58) (2.59)
The existence condition for a unique solution to the above equations for state and failure estimation is posed as a rank test in the form of a theorem (see p.425, citeNBD93). When the test holds, the state estimation equations take the form �?1 � (2.60) x^ k+1 = P k+1 E T W + ?P k ?T ?x^ k + P k+1C T V ?1yk+1 �?1 � � �?1 P k+1 = E T W + ?P k ?T E + C T V ?1 C ; (2.61)
20 where x^ is the estimated state with covariance P , ? is the jacobian of the nonlinear system, E and C are from the linearized state-space equations, and W and V are the assumed known state and output noise covariances. In the linear systems, the jacobian matrix takes the place of the Ab matrix. Numerically, a simple constant bias fault is applied to the sensor measuring the cart position x. The fault was detected by applying a statistical test on the lter innovation sequence. Once detected, the bias was estimated by computing the fault free states with the generalized Kalman lter and comparing them with the faulty states. The authors claim correction of the fault by subtracting its now known value (bias) from the faulty sensor output. The function � is assumed zero and the function is given. By design, the method is restricted to sensor and actuation type faults.
Chapter 3
Alternate Approaches The di�erent parametric identi cation tools discussed in Chapter 2.1 were applied to nonlinear structural systems with known models. These tools are here discussed as alternatives for DLE of structural faults in these types of systems. Further, the reviewed approaches of FDI in Section 2.2 that were applied to nonlinear electro-mechanical systems are considered in designing a friction fault isolation and detection scheme for a precision positioning application. As such, three models of dry friction for identi cation are considered as well.
3.1 Selection of a Structural Fault Estimation Method The methods discussed in Section 2.1 parametrically identi ed given low order models of structural systems with nonlinearities. This thesis is concerned with identifying higher order structures that contain nonlinearities as a result of damage. Further it is of interest to investigate extending the identi cation procedures to detection, location and estimation of new structural faults. Recall that these faults may occur in the form of structural spring hardening and/or softening and may or may not result in more nonlinear (smooth) spring terms. The analyses considered in Section 2.1 could equally be considered as identi cation of unknown parameters that pre-exist or result from damage, while using observed responses that contain the faulty information throughout the measurements. When a structural fault occurs, the more realistic experimental situation is response measurements that contain the occurrence of the fault, i.e. the measurements change behavior at some point in the observation time interval due to the presence of a fault. Therefore, the extension to DLE of new structural faults considers this situation as it is more likely to occur in real structures. Henceforth, structural fault estimation refers to the identi cation and extension procedures discussed above. To relate the approaches to the general problem of structural fault
21
22 estimation in a higher order nonlinear model, consider the equations of motion for an n degreeof-freedom statically coupled structural system given as
M x + C x_ + Kx + G (x; x_ ) = f (t) where, the diagonal mass matrix is given by 2 .. .
6 M = 664
mi
...
3 77 75 ;
(3.1)
(3.2)
the symmetric coupled damping and sti�ness matrices are C and K respectively, and the vectors of the nodal displacements and applied forces are given by
o o n n x = x1; x2 ; : : : ; xn ; f = f1; f2; : : : ; fn :
The matrix G represents nonlinearities in the structural model. A simple example of this matrix is considered here for discussion, given by 3 2 3 � x 1 77 66 1 32 � x 77 ; 6 2 (3.3) [G] = 66 77 . .. 64 5 �n x3n where these terms represent cubic restoring springs from each nodal mass mi to ground and are parameterized by the nonlinear sti�ness coe�cients �i . The methods so far have successfully identi ed unknown parameters that may exist in the matrices M , C , K and G when the model order n is small, i.e. one or two. The rst requirement of the approaches as alternatives for structural fault estimation is that they appear to be potentially successful in identifying higher order systems, as the numerical analysis of this thesis considers identi cation of an eight degree-of-freedom nonlinear model of a space antenna. To apply the direct approach, consider the quadratic functional
J (a) =
ZT 0
( m1 x1 + a1 �1 (x; x_ )T ? f1 (t) +
m2 x2 + a2 �2 (x; x_ )T ? f2(t) + � � � + mn xn + an �n (x; x_ )T ? fn(t) ) dt;
(3.4) (3.5) (3.6)
where the parameter vector a = [:::; ai ; ::: ] accounts for the damping, sti�ness and nonlinear coe�cients that parameterize the state variables (�i ) in the equations of motion for each nodal mass mi . The minimization of this functional yields linear algebraic equations that, when solved, produce the best t parameters a over the interval of observation (0; T ).
23 The direct approach su�ers from the disadvantage of requiring very accurate acceleration measurements xi . These measurements are integrated to provide the position and velocity measurements at each of the n nodes. For the generalized higher order system considered here, successful identi cation would be possible only if very low or no noise level conditions and no bias were present on the acceleration measurements. These requirements are not realizable except under conditions of numerical simulation or by processing ( ltering) the measurements to extract the noise and any bias present. However, the simplicity of the approach and its computational e�ciency indicate that the estimated parameters could provide a quick and reliable initial guess for the iterative methods, even when the measurements are contaminated with moderate levels of noise. This can be a useful tool for the iterative methods when intuition or information used in making an initial guess at the unknown parameters is not available. The application of the Gauss-Newton approach to the system described by Equation 3.1 generates the augmented state-space equations as
u_ = g(u)
(3.7)
where the augmented state vector u, with initial condition vector u(0), and the vector function g are given by
u = fx1 ; x_ 1 ; x2; x_ 2 ; :::; xn ; x_ n; a1 ; :::; ang ; g = �x_ 1 ; ? m11 a1 �1 (x; x_ )T + m11 f1(t); :::; x_ n ; ? m1 an �n (x; x_ )T + m1 fn(t); 0; :::; 0 : n n
(3.8) (3.9) (3.10)
The linear observation error is assumed as
! = ?u + � ;
(3.11)
where ? is a rectangular matrix and � is the observation error vector. The least-squares functional takes the form
J (u) =
ZT
(! ? ?u; ! ? ?u) dt + (u(0) ? u0 ; � (u(0) ? u0 )) : (3.12) 0 The matrix ? speci es which state variables are observed. In this formulation, position or velocity (or both) measurements may be observed at some or all of the nodes. The obvious advantage of this method over the direct approach is that it requires only the measurements speci ed by the user, given a su�cient interval of observation. Also, the results in [9] show good robustness of estimation with respect to noise. By minimizing the functional above and following the steps of this approach laid out in
24 Chapter 2, the sensitivity equations are given by
2 duc = g u ; u (c0 ; 0) = 4 I n u c c dt
3
05 ; 0 0
(3.13)
where the matrix gu is the derivative of g (u) with respect to u and the Jacobian matrix uc is found by integrating these sensitivity equations. The order of the system n does not compromise the success of this method except when the number of unknown parameters also becomes large. The greater the number of unknown parameters, the larger the augmented state vector u becomes and the more unwieldy the computation of the matrix gu becomes. Caution should be taken in using too few measurements or too short of an observation length in the measurements. As long as the discretized interval of observation contains more steps than there are unknown parameters, the estimation will provide unique estimates at each iteration. However, the parameters are not likely to settle to their true value unless there is a su�cient amount of information in the measured signals and a su�cient number of these signals. To visualize this, consider tting the parameters of an eighth order polynomial to a line segment that contains eight points. A least-squares t of the parameters cause the polynomial to lie directly onto the line, but the polynomial captures the \dynamics" of the line only. In all, the Gauss-Newton method shows promise in estimating a low number of parameters in a higher order nonlinear structural model. Applying the extended Kalman lter, the continuous state equation discussed with the input f can also be written as
X (t) = g (X ; f ; t) + w(t);
(3.14)
where system input error is introduced as w. The computation of the jacobian of g with respect to the augmented state X also creates a computational headache when the number of unknown parameters becomes large. Also, the technique requires known state and measurement error covariance matrices. For these reasons the extended Kalman ltering approach is severely restricted in higher order systems. The results shown in [14] also reveal moderate to low accuracy in a second order system. Further, the method is more complex in its implementation than the direct and Gauss-Newton approaches. The second stage of structural fault estimation considers the extension to DLE of new structural faults, where the faults occur while the observations are being collected. Extended Kalman ltering has shown on-line success in this type of application, as shown in Section 2.2. However, the approach is limited to low order systems and therefore is not investigated further. The advantages of the Gauss-Newton approach over the direct approach indicate that a quasilinearization type method for the identi cation of a higher order nonlinear structural model
25 is worthy of investigation. The extension of this method to DLE of new structural faults is also qualitatively investigated in the Chapter 4 investigation.
3.2 Selection of a Dry Friction Fault Detection and Isolation Method The desirable properties of the FDI scheme are that it be able to isolate and detect a nonsmooth nonlinearity such as Coulombic friction in an already highly nonlinear system, i.e. a pneumatic cylinder positioning device. The model estimation and parity space approach taken by Ho ing and Deibert discussed in Section 2.2 shows several attributes that would be of bene t in designing a dry friction FDI scheme for implementation in a precision positioning experiment. By tting a discrete linear transfer function to the system dynamics, the di�cult tasks of identifying a model structure and identifying the multiple (linear and nonlinear) coe�cients that parameterize the model are eliminated. Although the transfer function parameters have no physical interpretation, the resulting residuals show successful on-line detection of sensor and static process map faults for the process of low pass character that was considered [17]. The more successful ARMA residual is again given by
r = �y(z ?1) ? G(z ?1 )�u(z ?1 );
(3.15)
where the order of G is unknown. In other studies, the model error, i.e. the di�erence between the modeled and measured signals, also successfully serves as a residual that is employed for detection directly (see e.g. [16]). There are however several limitations in the approach taken by Ho ing and Deibert, particularly when considering the problem of dry friction fault detection and isolation. The faults considered in their study were perturbations of the existing information, e.g. altering the static nonlinear map or simulating a sensor fault in the model. However, friction is considered as an unknown input to the process dynamics and residuals are not equipped to relate any interpretation to this type of fault. Moreover, the residuals are valid for detection only and are unable to isolate one fault from the next. The chief limitation of their approach is the restriction to single-variable processes of low-pass character. Not only do precision positioning devices not exhibit such character, but Coulombic friction as a fault in these devices does not exhibit low pass behavior. Therefore, blank spots in which no fault monitoring is taking place in the estimation and parity space approach are unacceptable, as the process is subject to the dynamic behavior of the friction fault
26 input at every moment after the occurrence of the fault. Extended Kalman ltering, as applied in [18] and [19], assumes the model error to be a zero-mean stochastic process of known covariance. This restriction is often incorrect for systems with nonsmooth nonlinearities such as Coulombic friction [31]. The assumption also eliminates the option of computing residuals based on the model error directly, which is shown to be e�ective in other studies. Also, as discussed in Section 3.1, the approach is severely restricted in higher order systems. These alternative approaches are not directly applicable to the problem of implementing a much needed identi cation and friction FDI scheme in precision positioning devices. Therefore, such a scheme is designed here for implementation in a precision positioning experiment. As described below, the scheme steps out of the traditional two-stage structure of the FDI process (see Figure 1.1). The designed experimental set-up consists of a precision positioning device that actuates an air bearing mass. The positioning device is a servo pneumatic cylinder. The air bearing mass permits the addition of Coulombic friction on-line for detection. A (nonparametric) discrete fourth-order linear model, or transfer function, is t by weighted least-squares to the frequency response from the servo voltage input to the measured air bearing position output for the no friction fault case. The transfer function gives a position output for a voltage input and the second derivative of the position signal is computed to give the modeled, no friction acceleration. Caution should of course be taken when tting a linear model to a highly nonlinear process. As will be shown in Chapter 5, this approximation is good enough for the dry friction FDI scheme to be successful in the designed precision positioning experiment. As discussed, the same process modeling approach was taken in [17] and several improvements to their approach can be considered here. First, the model is t by weighted least-squares in one shot, a simple and very e�ective extension of least-squares alone. Also, the robustness of the discrete model t to variable inputs is addressed by observing the changes in the frequency response for the inputs of interest. Moreover, successful detection is achieved here for a wide range of time-varying inputs, rather than being restricted to constant inputs that change only step-wise as in [17]. The model error between the modeled and measured acceleration serves as a residual. This residual is not used for detection directly. Instead, the friction is found to be dynamically related to the acceleration residual. A prediction error approach [4] is used to model the dynamic relationship between the friction force and the acceleration residual as a lter, using an output error optimization. This is what isolates the friction fault from other possible process, sensor or actuation faults. An assumed friction model is incorporated with this experimentally generated lter and the procedure is implemented by recursive least-squares estimation of the friction model
27 parameters. Simple threshold decision logic is employed to detect the dry friction fault on-line. The dynamic lter here is valid for each input so that detection requires only recursive least-squares estimation of the friction model parameters for monitoring, rather than switching from parameter estimation for model tting to monitoring the model error based residuals as used in [17]. Also, no static curves of the process are required. Three parametric friction models are considered for implementation with the dynamic lter. Bliman and Sorine [34] presented two state variable dry friction models with desirable properties for control purposes. The identi cation of the parameters is open-loop and therefore applicable to non control applications as well. The models are geared to be mathematically sound and simple. The main considerations were to represent kinetic and static e�ects, stick slip and other experimentally observed e�ects. These e�ects were summarized in Figure 3.1. This gure
Figure 3.1: Qualitative Behavior of Friction Force F versus Position u displays the qualitative relationship between the dry friction force F between a sliding block and a surface and the position u of the block. Starting from rest (u = 0) the dry friction exhibits an elastic behavior until a maximum friction value, called the static friction fs , is reached. The position at this point is considered a microdisplacement, labeled se . Beyond the static value, the friction decreases until it settles to the kinetic value fk for displacements greater than sp . This behavior is of plastic type (Coulomb friction behavior) and displacements take the place
28 of microdisplacements. When the velocity switches, the same curve (with a sign change) begins from the reached position. This behavior is irreversible and therefore gives rise to hysteresis cycles, i.e. cycles that are rate independent in shape. This means that the transient behavior seems to be independent from the velocity but depends upon the covered distance or position when the sign of the velocity remains constant. >From this qualitative experimentally observed behavior, the desired properties can be summarized as a dry friction model that 1. matches the rate independence or hysteresis property, 2. models friction is dissipative, 3. provides easy identi cation of the model parameters in terms of the main experimental observations (fk ; fs ; se ; sp ), 4. must constitute, with the equations of motion, a well-posed set of equations, 5. must agree with the classical Coulomb and viscous friction model when sp ! 0, and 6. be simple enough in order to be used in real-time algorithms. The models are ordinary di�erential equations de ning the friction operator u 7! F (u) as
x_ f = ju_ j � Axf + Bu;_ xf (0) = 0 F (u(t)) = C f xf (t) and for rst and second order models, respectively, the matrices A; A = ? 1 ; B = f1 ; C = 1; and
"f
0 1 A=? @ "f
1
�
0
"f
f
(3.16) (3.17)
B; Cf are de ned as
0 f 1 1 0A 1 ; B = " @ � A ; C f = (1 1) : f ?f2 1 1
(3.18) (3.19)
F (u) represents the dynamic friction force at the contact area between two surfaces in relative
motion. The second order model has the advantage of better representing transient behavior, speci cally that friction force is independent of velocity and dependent upon covered distance in the transient range. The parameters (fk ; fs ; se ; sp ) represent the kinetic and static friction values, the breakaway distance of F (u(t)) from rest and the distance above which F (u(t)) is within 5 % of fk , respectively. A method of observing these parameters experimentally is given and the nonlinear relation between the model parameters in Equation 3.18 and Equation 3.19 and these measurements is also given. These models facilitate computer simulations of friction and a simulation involving tuning a proportional-integral-derivative (PID) controller was given. Although
29 simple and sound in representing the physical phenomena in dry friction, the identi cation of the parameters is not suited to FDI purposes. As these models are parametrically nonlinear, identi cation must be performed o�-line and by possibly multiple experimental observations. Haessig and Friedland [41] contend that the ve low velocity models considered in the study are numerically ine�cient and if sticking is not an issue coulomb and viscous friction su�ces as a model. The model gives the sliding friction force Ff between two surfaces as
Ff = � jxx__ j + x;_ (3.20) where x_ is relative velocity between the surfaces, � and are the coulomb and viscous term parameters, respectively, and ?Ff and x_ are conventionally assumed positive to the right. The coulomb and viscous model of friction is employed in this experiment because it facilitates the isolation and on-line detection of the friction fault as the parameters appear linearly in this model. Linear parameterization of this model make it possible to employ the accurate and e�cient least-squares estimation of the model parameters recursively. Further, this model represents the low stick high slip friction characteristics observed at the aluminum on aluminum contact surface in the experimental setup. The majority of the science and engineering elds that investigate friction modeling consent that the dry slipping mechanism is accurately described by coulomb and viscous behavior [30], [29], [41], with experimental validation in [36]. As in the literature, it is also experimentally observed that the validity of this model in representing the friction force decreases as velocity goes to zero. The coulomb viscous model is also numerically much more e�cient than other models that more accurately represent friction at smaller velocities, e.g. the reset integrator and bristle models. As an aside, Johnson and Lorenz [31] also used signal processing to generate the dynamic relationship between state errors, i.e. the di�erences between modeled and measured states, and the (measured) states in a friction model. The scheme here does not require motion control as in [31]. The method employed in this paper does suggest that an extension of the coulomb and viscous friction model could be made by including higher order velocity and position terms. By parameterizing these additional terms linearly, such an extension would be possible in the on-line detection scheme designed here.
Chapter 4
Parameter Estimation of a Damaged Structure Using a Quasilinearization Approach Simulation of systems for observation and/or health monitoring for fault detection requires a model of the system. When modeling structural systems for observation and health monitoring, it is very important to consider a physically based model, as structural analysis techniques that assess these structures for safety rely upon physical interpretation. A physically based linear model of a exible space antenna is given by Kabe [10]. A nonlinearity is added to this model to simulate a structural spring that becomes nonlinear as a result of damage. To identify unknown sti�ness parameters in the model, including the coe�cient of the added nonlinear spring term, a quasilinearization approach is applied. The technique successfully estimates two linear and one nonlinear sti�ness coe�cients, o�-line, under various conditions of loading, nonlinearity, measurement noise and under various computation time constraints. Further, the quasilinearization approach is brie y extended to the location and estimation of new structural faults, i.e. new damage in the form of sti�ness hardening or softening and possibly added nonlinearities, that can occur in the system.
30
31
4.1 Procedure for Parameter Estimation of a Nonlinear Structural Model The key steps in the derivation and application of the quasilinearization parameter estimation technique are
� Modify the analytic linear model of the space antenna structure given by Kabe [10] to include a nonlinear structural spring that results from damage.
� Derive the quasilinearization approach of parameter estimation. � Apply the approach to identify unknown parameters in the nonlinear space antenna model under varying conditions of loading, nonlinearity levels and measurement noise.
� Discuss the extension of quasilinearization to detecting further damage to the structure. In Section 4.2 the linear exible model of the space antenna structure is given and modi ed to include a nonlinearity as a result of damage. Speci cally, one structural spring is assumed to go from linear restoring force behavior to linear and cubic behavior as a result of damage. A rigorous derivation of the quasilinearization approach of parameter estimation of nonlinear models is given in Section 4.3. The application of this approach to the damaged space antenna model is in Section 4.4 and the results of numerical tests are given and discussed in Section 4.5. In Section 4.6 conclusions about the method and the extension to the detection of more structural faults to the nonlinear structure is discussed.
4.2 Analytic Model of a Nonlinear Space Antenna Structure Figure 4.1 shows the analytical test structure of a exible space antenna as given by Kabe [10]. This structure can be thought of equivalently as eight interconnected masses in series, i.e. all mass's move translationally in the same direction, on a frictionless surface. Each mass has one degree-of-freedom and the 14 load paths are the springs that connect the masses, to each other or to ground, in the same axial direction as the mass motion. As the relative sti�ness magnitude range is large (from 1.5 to 1000) this structure represents a severe test case. There are three unique lumped mass values and six unique sti�ness coe�cients. The equations of motion for this eight degree-of-freedom (8 DOF) statically coupled system are given as [M ] fxg + [K ] fxg = ff g
(4.1)
32
Figure 4.1: Kabe model of Space Antenna where, the diagonal mass matrix is given by
2 6 [M ] = 664
...
mi
the coupled sti�ness matrix is given by 2 ?5 0 0 66 5 ? + + ? 0 2 66 5 1 2 5 66 0 ?2 0 1+ 2+ 4 66 0 0 0 +2 3 4 [K ] = 666 0 ?4 ?4 66 0 66 0 0 0 ?4 66 0 0 0 4 0 0 0 0 0 k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
...
0 0 ?4 ?4 3 +2 4 0 0 0
3 77 75 ;
k
k
k
(4.2)
0 0 0 ?4 0 + + 1 2 4+ ?2 ?6 k
k
k
k
k
k
k
k6
0 0 0 0 0 ?2 1+ 2+ ?5 k
k
k
k
0 0 0 0 0 ?6 ?5 5+ 6 k
k5
k
k
3 77 77 77 77 77; 77 77 77 75
k
(4.3) and the vectors of the nodal displacements and applied forces are given by
� x = n
o o � n f = f1; f2; : : : ; f8 :
x1 ; x2 ; : : : ; x 8 ;
One nonlinearity is added to the Kabe model above to simulate a structural spring that becomes nonlinear as a result of damage. Only one spring is altered due to computational
33 limitations, discussed in Section 4.6. The spring k1 of m6 is selected to include this nonlinearity in the form of cubic dependence on position. This spring location was chosen because it a�ects the greatest number of modes in the undamaged linear structure. The analysis of identifying k1 at m6 as the primary modal participant in the structure under general loading is given in Appendix A. The added nonlinearity generates Du�ng's equation
m6 x6 + k1 x6 (1 + �x26 ) = f~6 ; where f~6 = k2 (x7 ? x6 ) + k4 (x4 ? x6 ) + k6 (x8 ? x6 ) + f6 :
(4.4) (4.5)
All other equations are retained in their original linear form. The damaged structural spring k1 and k1 � at m6 are unknown constants and are to be estimated. For added complexity, the adjacent k4 at m6 is also assumed unknown and requires estimation. All other sti�ness values and all mass values are known. It is henceforth assumed that the units in the equations are normalized so that the equations to follow remain dimensionally correct, as is done in [8].
4.3 Quasilinearization Quasilinearization was developed as a numerical tool for solving problems de ned by nonlinear di�erential equations and has been extended to identi cation problems [40], [8]. Considered in this study is a simpli ed identi cation (or optimization) problem, as the model and parameterization are given. Under certain assumptions, the technique can successfully reduce a nonlinear optimization problem to a succession of operations involving the numerical solution of linear di�erential and algebraic equations. First the equations of motion are linearized into the form of a sequence of equations, in a way analogous to the Newton-Raphson (N-R) method for root nding, and a linear solution to these equations is formulated and parameterized in terms of the unknown constants. Second, the resulting sequence of linear di�erential equations are solved to generate the linear solution, comprised of particular and homogeneous parts. Third, given the response (displacement) data from the original equations of motion, a cost function is minimized in a least-squares sense which yields a set of linear algebraic equations. The solution of these equations generates the next estimate for the unknown parameters. Steps two and three are repeated until the parameters converge to their true values, as discussed in the following sections.
4.3.1 Step 1 : Linearization of Equations and Solution Form The N-R method properties of monotonicity and quadratic convergence apply here provided the equations behave in the following way. A set of autonomous nonlinear rst order
34 di�erential equations can be expressed in the form
x_ = f (x); x(0) = c; t � 0 (4.6) where ( _ ) is a derivative with respect to time and c represents the initial condition vector. As
this study is considering a dynamics problem, this set of equations is henceforth referred to as the equations of motion. Assume f is continuous in x and t and has a bounded continuous Hessian (second partial derivatives w.r.t x), for all x and t in the region of interest. Further, assume f is strictly convex in x in the region of interest. The rst order Taylor series around a nominal trajectory x(0) (t) is a linear di�erential equation that yields a sequence of continuous functions determined by the recurrence relation dx(1) = f (x(0) ) + @ f (x(0) ) (x(1) ? x(0) ); x(1) (0) = c: (4.7)
dt
@x
where x(0) (t) is used to begin the iterative process and represents the initial approximation of
the solution to Equation 4.6. According to Bellman [8], the success of convergence of the recurrence solutions to the true solution depends upon selecting x(0) (t) su�ciently close to the true solution, just as the success of N-R in root nding depends upon the initial guess. Under the bounded Hessian assumption there exists a common interval in time in which the sequence solutions x(n) (t); (n = 1; 2; : : : ); are uniformly bounded. Further, the sequence of solutions can be proven to converge quadratically to the solutions of the original equations of motion, if they converge at all. The property of monotonicity of the sequence requires f to be positive and convex. These properties are very restrictive, but are used in [8] for the derivation of the quasilinearization technique and the examples contained therein do not require these properties (page 19, [8]). The parameters in Equation 4.6 appear linearly and this system can be augmented to include those parameters which are unknown. In this way the unknowns are collected into the vector a and the augmented system is
x_ (t) = f (x; a); a_ (t) = 0;
x(0) = c; a(0) = a0;
x(t) � RNx a(t) � RNa
(4.8) (4.9)
where RN represents the N -dimensional real vector space and Nx is the dimension, or more clearly the number of degrees-of-freedom, of the equations of motion. The unknown parameter vector a, of dimension Na , is equal to it's unknown initial condition a0 for all time in the interval of interest. The vector x(n) (t) � RNxa that evolves according to Equation 4.7 now represents the recursive augmented state, where dimensionally Nxa = Nx + Na . A solution form to this augmented set of recursive linear di�erential state equations is assumed as a sum of particular and
35 homogeneous parts (by superposition) as
Xa (4.10) x(n)(t) = P (n) (t) + i H (Nnx)+i (t); i=1 where P (n) is the particular part, H (Nnx)+i make up the homogeneous parts and the initial conditions are N
and
P (n)(0) , P0 = [ cT ; 0TNa ]T ; where 0TNa = [::: 0; :::] � RNa ; H N(nx)+i(0) , H0 = [:::; �j;Nx+i; :::]T ; j = 1; : : : ; Nxa; i = 1; : : : ; Na:
(4.11) (4.12)
Therefore, the goal of this recursive technique is to get the estimated parameter vector a0, thereby matching the initial conditions of Equation 4.10 with the
� initial conditions of the augmented system in Equation 4.8 and Equation 4.9. This solution form assumes that all initial conditions for the equations of motion, i.e. the c vector, are known. However, the method can be easily extended to identify any unknown initial conditions as well. Note that the initial approximate solution to Equation 4.8 and Equation 4.9 now requires initial guess's for the true parameter values as well as the initial guess for the solution to Equation 4.8. Henceforth in this Section, solution refers to the augmented system discussed here. RNa to converge to
4.3.2 Step 2 : Generation of Recursive Solution Plugging Equation 4.10 into Equation 4.7 yields the recursive set of rst order linear di�erential equations, where the particular part of the solution evolves according to dP (n) = f (x(n?1) ) + J (x(n?1) )(P (n) ? x(n?1) ); P (n) (0) = P ; (4.13) 0 dt the homogeneous part of the solution evolves according to dH (Nnx)+i (n) (n?1) (n) dt = J (x )H Nx+i ; H Nx +i (0) = H0; i = 1; : : : ; Na ; and the jacobian matrix is given by
J (x(n?1))
(n?1) = @ f (x@ x ) ; n = 1; 2; : : : :
(4.14) (4.15)
4.3.3 Step 3 : Minimization of Cost Function and Estimate Generation It is assumed that the system we are studying is observed x(t) over a nite interval t � [0; T ]. The least squares method provides a cost function to be minimized at each iteration, where the cost function is #2 ZT " Na X ( n ) ( n ) (4.16) P (t) + i H Nx+i(t) ? x(t) dt �= 0 i=1
36 Note that Equation 4.16 is the L2 (0; T ) norm of the time-varying error vector, where the error is between the linearized solution x(n) (t) and the observed solution x(t). Minimizing a least squares function such as this to obtain a best t set of parameters is the most common method of parameter estimation, although it often arises in di�erent forms (cite papers and books). It is here implied that errors superimposed upon the observed data are uniformly distributed throughout the time interval, i.e. the weighting function (not shown) in Equation 4.16 is identity for all time in the interval. The minimization of � with respect to the estimated parameter vector
yields a system of linear algebraic equations
@� =) D = b @ i = 0; i = 1; :::; Na Z T (n+1) N �N where Dji = H Nx+j (t) T H (Nnx+1) +i (t) dt; D � R a a ; 0
and bj =
ZT � N x(t) ? P (n+1)(t) ]T H (Nnx+1) +j (t) dt; b � R a
(4.17) (4.18)
(4.19) 0 D is a symmetric matrix and the solution to the estimation problem at each iteration becomes
= D?1 b, for nonsingular D. For discrete observations, the integrals in the minimization Equation 4.17 are replaced by summations. As stated before, the success of the convergence of the approximate solutions to the observed solutions, and therefore the success of the parameter estimates to the true parameter values, depends upon the initial approximation of the solution to the equations of motion and the function properties of continuity, etc.. In a numerical example such as this, a simple and e�cient way to obtain a rst approximate solution x(0) (t) is to integrate the original equations of motion and make a reasonable guess at the parameter values. This is feasible for our formulation as we have assumed that all initial conditions for the equations of motion are known. This method serves as a reliable starting point for the iterations but other methods when this is not feasible are discussed in Chapter 14 of [8].
4.4 Application to Modi ed Kabe Model The estimation is performed assuming all constants in Equation 4.1, modi ed by Equation 4.4, are known except k1 , � and an adjacent spring k4 , all at m6 as appearing in Figure 4.1.
37 Prior to linearization, we write the modi ed equations of motion in state space form as where and
X_ = F (X ; f ); X (0) = C ; t � 0 iT iT h h X = x1 ; x_ 1 ; : : : ; x8 ; x_ 8 ; aT ; a = a1; a2; a3 ; iT h iT h f = f1; : : : ; f8 ; F = x_ 1 ; : : : ; x8 ; 0; 0; 0 iT h C = x1(0); : : : ; x_ 8 (0); a0 = � cT ; aT0 �T :
(4.20) (4.21) (4.22) (4.23)
hAs before theiTunknown parameter vector a is equal to it's unknown initial condition a0 = k4 ; k1 ; k1 � for all time in the interval of interest. The X and a vectors are what the iterations are estimating in the hopes of convergence. The linear recursive solution for this system is given by 3 X n) (t); n = 1; 2; : : : ; where ( n ) ( n ) X (t) = P (t) + k H (16+ k k=1 dP (n) = F (X (n?1) ) + J (X (n?1) )(P (n) ? X (n?1) ); P (n) (0) = C ; dt n) dH (16+ k (n?1) )H (n) ; H (n) (0) = [:::; �j;16+k ; :::]T ; j = 1; : : : ; 19; 16+k 16+k dt = J (X � � (n?1) ; f ) �T � J = dFi : k = 1; 2; 3 ; and J (X (n?1) ) = dF (X
dX
becomes
ij
dXj
(4.24) (4.25) (4.26) (4.27)
For m discrete measurements in time of the eight mass displacements, the cost function
�=
m X 8 h X
i2
x(jn) (ti ) ? xj (ti ) ; where
i=1 j =1 � � ( n ) xj (ti ) = X (n) (ti ) T I j ; and
Ikj = �k;2j?1 ; k = 1; :::; 19 ;
(4.28) (4.29)
and the minimization follows according to Equation 4.17 - Equation 4.19. The rst approximate solution X (0) (t) is generated from the original equations of motion and a guess at the true parameter values is used for to begin the iterations. For all iterations that follow the initial guess stage, only the parameter values change, as generated by Equation 4.28. Recall that the strain energy argument of selecting k1 at m6 for nonlinearization as a result of damage is based upon the condition of general loading. The inputs to the system considered here are step loads (initiating at t = 0) of varying magnitude for f5 and f6 and a sum of sinusoids for f6 , applied separately. The damage level, i.e. the parameter �, the time step of integration and the initial guess's for the parameters are varied to examine conditions for successful convergence. Further, the case of noise contamination on the eight mass displacement measurements is examined. The units are all normalized and the model is integrated with a step size of 0.01 sec, unless speci ed otherwise.
38 Table 4.1: Convergence Results for Variable � with f5 = 1000 True Values Initial 1st 2nd 3rd Converged Variations (k4 ; k1 ; �k1 ) Guess Iteration Iteration Iteration Values 0.1 100 50 100.5 99.99 1000 1300 997.1 1000. same same 100 145 101.4 101.9 0.5 100 150 99.59 99.98 1000 1300 997.2 1000. same same 500 320 506.1 509.7 2.5 100 150 99.71 100.0 1000 750 1002. 1000. same same 2500 1700 2548. 2543. 10 100 150 98.80 100.1 100.1 1000 750 996.0 1001. 1000. same 10000 7500 10520 10130 10140
�
Table 4.2: Convergence Results for Variable � with f5 = 4000 True Values Initial 1st 2nd 3rd Converged Variations (k4 ; k1 ; �k1 ) Guess Iteration Iteration Iteration Values 0.1 100 50 100.5 100.0 1000 1300 998.9 1000. same same 100 145 101.4 101.7 0.5 100 150 99.63 100.1 1000 1300 995.7 1000. same same 500 320 507.4 507.3 2.5 100 150 99.37 100.1 1000 750 999.5 1002. same same 2500 1700 2574. 2532. 10 100 150 99.50 100.0 100.1 1000 750 1001. 1002. 1002. same 10000 7500 10250 10130 10140
�
4.5 Application Results As Table 4.1 and Table 4.2 show, for � variations and applied step loads at m5 of f5 = 1000 and 4000 the two linear parameters (k4 ; k1 ) converged to three and four signi cant digits and the nonlinear parameter (�k1 ) converged to two signi cant digits, all within two iterations. In all tabulated results that follow, converged values are de ned as those which don't change to four signi cant gures after two or more iterations. Table 4.3 shows that for an applied step load at m6 of f6 = 1000, the parameter convergence accuracy deteriorates to failure as � is increased. For the most damaged or nonlinear case, i.e. � = 10, the iterations remained bounded but never converged to any values. Not shown here is that for an initial guess of (1; 1; 1), all converged cases in Table 4.1 - Table 4.3 remained convergent in the same number of iterations. Table 4.4 shows that convergence of the least nonlinear case of Table 4.3 is lost as the
39 Table 4.3: Convergence Results for Variable � with f6 = 1000 True Values Initial 1st 2nd 3rd Converged Variations (k4 ; k1 ; �k1 ) Guess Iteration Iteration Iteration Values 0.1 100 50 100.5 100.0 1000 1300 1007. 1003. same same 100 145 95.02 99.21 0.5 100 150 99.41 101.3 101.4 1000 1300 1014. 1003. 1002. same 500 320 493.9 497.7 497.8 2.5 100 150 99.50 55.00 100.4 99.83 1000 750 1005. 960.0 1076. 1070. 2500 1700 2550. 2592. 2440. 2440. 10 100 150 99.50 1536 68.8 1000 750 1066. 11260 872.5 none 10000 7500 10140 -1024. 9871.
�
Table 4.4: Decrease in Time Step with f6 = 1000; � = 0:1 Time Step True Values Initial 1st 2nd 3rd Converged (k4 ; k1 ; �k1 ) Guess Iteration Iteration Iteration Values 0.01 100 50 100.5 100.0 1000 1300 1007. 1003. same same 100 145 95.02 99.21 0.03 100 50 108.1 98.9 100.7 100.3 1000 1300 1023. 1002 1041 1030 100 145 61.40 103.3 84.7 88.9 0.04 100 50 58.5 111.0 109.9 1000 1300 321.3 1198. 549.5 none 100 145 235.9 113.0 200.6 time step is increased. For the non convergent case of Table 4.3, using even the true values (100, 1000, 10000) as an initial guess does not yield convergence. Table 4.5 shows that by decreasing the time step by 10 orders of magnitude, convergence is obtained in three iterations. The table also reveals that by changing the input to a sum of sinusoids, the originally nonconvergent time step converges in three iterations. As with all other cases, the parameters eventually fail to converge as the time step is increased for this sinusoidal input. Table 4.6 combines variations in time step as well as in initial guess for a larger input at m6 of f6 = 4000, while showing computation time per iteration. For the extreme initial guess case in the second row in this table, inf means that the parameters not only did not converge but became unbounded. The time step reduction shown in row three demonstrates that convergence is obtainable for this extreme initial guess at the cost of larger computation time. The success of convergence depends primarily upon the time step of integration and secondarliy upon the type of loading and the magnitude of damage in k1 present, i.e. the
40
Table 4.5: Variable Time Step, f6 Input with I.G. = (150; 750; 7500); � = 10 f6 Time Step True Values 1st 2nd Converged (k4 ; k1 ; �k1 ) Iteration Iteration Values 1000 0.01 100 99.5 1536 (step) 1000 1066. 11264 none 10000 10139 -1024 1000 0.001 100 99.99 100. 100. (step) 1000 1066. 1000.66 1002.1 10000 10001.6 99968. 99968. 0.01 100 100.3 99.63 99.63 f�6� 1000 998.0 975.1 974.8 10000 9737. 10020 10010 0.015 100 15490 1000 -12800 inf f�6� 10000 34820 � f�6 = 1000 ( 0:35 sin(10t) + 0:3 sin(700t) + 0:25 sin(800t) + 0:2 sin(200t) )
Table 4.6: Variable Time Step and Initial Guess with f6 = 4000; � = 0:1 Time True Values Initial 1st 2nd Converged Computation Step (k4 ; k1 ; �k1 ) Guess Iteration Iteration Values Time/Iter 0.01 100 50 100.4 99.96 99.96 1000 1300 1119. 1045. 1049. 2.5 sec 100 145 92.42 98.21 97.97 0.005 100 50 24580 3584. 1000 750 -1536. 400 inf 5.5 sec 100 7500 1408 -512 0.0005 100 50 100.0 100.0 1000 750 1012. 1000. same 50.1 sec 100 7500 99.05 100.0
41 Table 4.7: Measurements (x3 , x6 , x8 ) Contaminated by Random Noise for f5 = 1000; � = 0:1 Percentage True Values Initial 1st 2nd Converged At 25 Added Noise (k4 ; k1 ; �k1 ) Guess Iteration Iteration Values Iterations 0% 100 50 100.5 99.99 1000 1300 997.1 1000. same 100 145 101.4 101.9 5% 100 50 98.57 99.99 99.96 1000 1300 988.5 1000. 1000. 100 145 140.5 102.3 102.1 10 % 100 50 96.51 99.95 99.92 1000 1300 983.1 1001 1001 100 145 197.9 104.9 102.2 20 % 100 50 92.58 98.93 98.82 1000 1300 978.9 997.6 1002 100 145 334.2 172.1 102.6 50 % 100 50 87.90 92.34 98.07 1000 1300 989.8.1 1023 none 1009 100 145 595.3 349.6 170.4 magnitude of �. For a small enough time step, all cases considered here converge in one iteration. The success of the quasilinearization parameter estimation approach is also investigated for cases where the system observations are contaminated by noise. Uniformly distributed random noise is added to the measured displacements x3 , x6 and x8 at 5, 10, 20 and 50 % of the peak value of each of these signals. Uniformly distributed noise is restricted between � 1 in peak value and a scaling is used to achieve the desired percentage of the peak values of the measurements. These cases are considered for the conditions of the rst case given in Table 4.1 and the results are given in Table 4.7. To compare the noise-free and increasingly noisy measurements, Figure 4.2 - Figure 4.5 show the measured displacement of mass six, i.e. x6 , for the increasing levels of added noise. Clearly, the greater the noise content in the observed signals, the poorer the convergence performance.
4.5.1 Discussion of Results The tabulated results indicate that the time step of integration is the chief factor that determines the success of convergence of the unknown model parameters to the true values. As the time step is decreased, all of the variable conditions of loading and nonlinearity (damage) levels eventually result in convergent results. This dependence of successful convergence on time step can be translated into a dependence of the simulated signals on continuity in time. As the time step is increased, the ability of the applied integration routine to maintain continuity in time of the observed and generated signals becomes compromised. The loss of continuity in time of the observed signals directly corrupts the continuity of the generated recursive equations as
42 Response of x6(t) for 0 % noise 0.8
0.6
0.4
6
x (t)
0.2
0
−0.2
−0.4
−0.6
−0.8
0
1
2
3
4
5 time (sec)
6
7
8
9
10
Figure 4.2: Measurement of x6 (t) for Conditions of Table 4.7 and of No Added Noise the observed signals force the linear recursive equations. To see the forcing terms explicitly in the recursive equations, the jacobian is computed for the application to the modi ed kabe model. The jacobian in Equation 4.27 yields x6 (t); x6 (t)3 and x4 (t) as the forcing functions in the iterative homogeneous equations, Equation 4.26, appearing in the form dHj(8n) (t) k4 a1 1 1 dt = ? m4 (k3 + k4 + a1 )Hj7 + m4 Hj9 + m4 Hj11 + m4 (x6 (t) ? x4 (t))Hj17 ; (4.30) n) (t) dHj(12 a1 H ? 1 (k + k + a + a + 3a r2 )H + k2 H = 3 6 j11 m j13 dt m6 j7 m6 2 6 1 2 6 1 x ( t ) k 6 H ? x6 (t)3 H ; (4.31) + m6 Hj15 + m (x4 (t) ? x6 (t))Hj17 ? m j 18 m6 j19 6 6 6 with initial conditions
Hjk(n) (0) = �jk ; j = 17; 18; 19; k = 1; : : : ; 19:
(4.32)
43 Response of x6(t) for 10 % noise 0.8
0.6
0.4
6
x (t)
0.2
0
−0.2
−0.4
−0.6
−0.8
0
1
2
3
4
5 time (sec)
6
7
8
9
10
Figure 4.3: Measurement of x6 (t) for Conditions of Table 4.7 and 10 % Added Noise These terms also drive the iterative particular equation along with the varying input functions. The e�ect of losing continuity in time becomes magni ed in the x6 (t)3 term, since x6 (t) itself is losing continuity. Therefore, the tabulated convergence results can be translated into a comparison of continuity in time of these non input forcing terms. For the highly nonlinear case investigated in line one and two of Table 4.5, Figure 4.6 shows x6 (t) and x6 (t)3 for the non convergent time step and Figure 4.7 displays the improvement in the continuity in time of these signals for the reduced convergent time step. Similarly, the breakdown of convergence investigated in Table 4.4 is displayed as the breakdown in continuity of the x6 (t) and x6 (t)3 signals in Figure 4.8, Figure 4.9 and Figure 4.10. A comparison of Figure 4.6 to Figure 4.9 would lead one to question the idea that increased continuity always yields increased convergence, since the signals for the nonconvergent case of Figure 4.6 are smoother (smaller time step) than those of the convergent case of Figure 4.9.
44 Response of x6(t) for 20 % noise 0.8
0.6
0.4
6
x (t)
0.2
0
−0.2
−0.4
−0.6
−0.8
0
1
2
3
4
5 time (sec)
6
7
8
9
10
Figure 4.4: Measurement of x6 (t) for Conditions of Table 4.7 and 20 % Added Noise The gures so far show that the trend of continuity increasing with convergence performance is true for a given set of conditions. What di�erentiates the case of Figure 4.6 from Figure 4.9 is that the former is 100 times more nonlinear, in terms of the parameter �, resulting in higher frequency, reduced magnitude and chie y less linear responses. The approximation of linearization becomes less valid and the iterative solutions fail to converge. Table 4.3 exhibits this trend for all other conditions being equal. By comparison, the convergence of the sinusoidal input for the third case investigated in Table 4.5 has the e�ect of reducing the frequency of the x6 (t) and x4 (t) responses, as shown in Figure 4.11 and Figure 4.12. Further, the increase in time step for this sinusoidal case results in loss of convergence. The coupling between time step, nonlinearity and input as they a�ect convergence is a non trivial one. There seems also to exist a relationship between convergence and the frequency of response in the x4 (t); x6 (t), and x6 (t)3 terms that drive the iterative linearized equations.
45 Response of x6(t) for 50 % noise 1
0.8
0.6
0.4
6
x (t)
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
1
2
3
4
5 time (sec)
6
7
8
9
10
Figure 4.5: Measurement of x6 (t) for Conditions of Table 4.7 and 50 % Added Noise
4.6 Conclusions and Extension to Damage Detection The success of this method in parametrically identifying unknown parameters o�-line that accompany linear and nonlinear terms and pre-exist or result from damage in the model of the space antenna structure is extensively proven for a wide range of loading, nonlinearity level, integration routine conditions and noise levels in the observed dynamic responses. Bellman [8] has also shown success of the method in cases where only partial information in the dynamic response is observed. The success of the method can also be improved in cases where weighting the cost function information is appropriate. For example, when a section of the measured data contains better information for identi cation, i.e. if initial condition mismatching exists and noise or damage contaminated the observed signals at a certain point in time, a Jabobi approximation weighting is used. Further, if the initial or nal data in the measurements are more reliable for identi cation, exponential (Laguerre approximation) weighting is appropriate.
46 F6 = 1000, alpha = 10 and delt = 0.01
m6 displacement (x6)
1
0.5
0
−0.5
−1
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
0
0.05
0.1
0.15
0.2
0.25 time (sec)
0.3
0.35
0.4
0.45
0.5
1
x63
0.5
0
−0.5
−1
Figure 4.6: Continuity of Non Convergent Step Input Case in Table 4.5 Although the method is highly successful for the eighth-order space antenna model, the number of parameters is kept small since the number of di�erential and linear equations that require solutions for each iteration grows rapidly for a higher number of unknown parameters. In the structural model considered here, consider the extreme case that all of the masses are unknown and possibly di�erent, each spring element is nonlinearized, to account for possible damage, by adding cubic dependence and all of the sti�ness values are unknown and not necessarily equal. Each iteration would require the solution of 784 di�erential equations and the inversion of a 48 by 48 matrix. The observation measurements in this case must contain at least 48 samples for the problem to be determined and many more samples than that for any hope of successful convergence. The likelihood of a sign error in the enormous equation formulation and possible ill-conditioning of the matrix pose threats to the success of the method, which would also require large computational time. As a tool for identifying a limited number of unknown parameters in damaged and
47 F6 = 1000, alpha = 10 and delt = 0.001
m6 displacement (x6)
1
0.5
0
−0.5
−1
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
0
0.05
0.1
0.15
0.2
0.25 time (sec)
0.3
0.35
0.4
0.45
0.5
1
x63
0.5
0
−0.5
−1
Figure 4.7: Continuity of Convergent Step Input Case in Table 4.5 therefore nonlinear higher order structural systems, given the model structure and post damage dynamic response observations, the quasilinearization approach of parameter estimation is reliable.
4.6.1 Extension of Application of Quasilinearization to Damage Detection The analysis so far has considered identifying unknown parameters, that pre-exist or result from damage, using observed responses that contain the faulty information throughout the measurement. A more realistic situation is response measurements that contain the occurrence of the fault, i.e. the measurements change behavior at some point in time due to the presence of a fault. Further, the fault may result in hardening or softening of the structural spring, which also may remain linear or become nonlinear as a result of the damage. For the numerical exercise studied here, the model of a nonlinear space antenna struc-
48 F6 = 1000, alpha = 0.1 and delt = 0.01
m6 displacement (x6)
2 1.5 1 0.5 0 −0.5 −1
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
6
x63
4
2
0
−2
Figure 4.8: Continuity of Initial Convergent Case in Table 4.4 ture has been identi ed with quasilinearization parameter estimation. By its formulation, the quasilinearization approach yields a solution that, when it converges, is extendable to the problem of locating and assessing, or estimating, new damage to the structure. For a set of known, non faulty dynamic response observations, quasilinearization generates an iterative linearized solution to the nonlinear di�erential equations that describe the structural system dynamics. The estimated coe�cients in the model generate a least-squares t between the measured dynamic responses, e.g. the mass position measurements, and the recursively generated responses. The relationship between the measured and generated responses is given by
x(t) = x(n)(t; ) + e(t) = P (n)(t) +
Na X i=1
i H (Nnx)+i (t) + e(t);
(4.33)
where x(t) are the observed responses, x(n) (t) are the nth iterative responses parameterized by the vector , P (n) (t) and H (n) (t) are the associated recursive particular and homogeneous
49 F6 = 1000, alpha = 0.1 and delt = 0.03
m6 displacement (x6)
2 1.5 1 0.5 0 −0.5 −1
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
6
x63
4
2
0
−2
Figure 4.9: Continuity of Less Convergent Case in Table 4.4 equations, and e(t) represents the error between the observed and generated signals. When convergence of the parameters is achieved, the L2 norm of e(t) is minimized over the measured dynamic responses. In health monitoring of a system for fault detection, a residual serves as a detection gauge as it carries information that is sensitive in some way to the occurrence of a fault. The signature of the residual is the quantitative or qualitative behavior that the residual displays in the event of a fault. In structural systems where quasilinearization is employed for parametric identi cation, a residual r(t) in component form is given by
rj (t) = xj(n) (t) ? x^j (t);
(4.34)
where x^j (t) is the currently observed dynamic response, e.g. a mass position measurement, of the structure under certain loading conditions and x(jn) (t) is the \modeled" response that is generated under the same loading conditions and using the converged and known parameters in
50 F6 = 1000, alpha = 0.1 and delt = 0.04
m6 displacement (x6)
2 1.5 1 0.5 0 −0.5 −1
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
0
0.2
0.4
0.6
0.8
1 time (sec)
1.2
1.4
1.6
1.8
2
6
x63
4
2
0
−2
Figure 4.10: Continuity of Non Convergent Case in Table 4.4 the model. In the absence of a structural fault, i.e. when none of the sti�ness values have been compromised, rj (t) = ej (t) and accordingly remains small. When a fault occurs, rj (t) becomes (generally) closer in magnitude to the order of the measured or generated responses. This qualitative description can be seen quantitatively as it applies to the nonlinear space antenna structure. For the loading, nonlinearity and integration conditions of case 1 in Table 4.1, a softening fault in k4 from 100 to 50 is induced prior to any observations and the generated residuals are plotted in Figure 4.13. A threshold of � 0.001 is put on all of the residuals as the signature value and the fault is detected within 0.02 sec. The previously estimated parameters then serve as the initial guess for a new set of iterations. In this case, the parameters converged to the new true values (50,1000,100) within 2 iterations. This exercise is essentially a repetition of the assessment procedure already examined in the previous sections. Figure 4.14 shows the generated residuals for the same conditions except that the softening fault at k4 is induced at t = 5 sec for 10 sec of observed data. Naturally, di�culty arises as
51 f6 = 1000, alpha = 0.1, delt = 0.03 1
x4
0.5 0 −0.5 −1
0
1
2
3
4
5 time (sec)
6
7
8
9
10
0
1
2
3
4
5 time (sec)
6
7
8
9
10
1
1.2
1.4
1.6
1.8
2 time (sec)
2.2
2.4
2.6
2.8
3
1
1.2
1.4
1.6
1.8
2 time (sec)
2.2
2.4
2.6
2.8
3
2
x6
1.5 1 0.5 0
1
x4
0.5
0
−0.5
2 1.5
x6
1 0.5 0 −0.5
Figure 4.11: Higher Frequency for Non Convergent Step Input Case of Table 4.5
52 f6 = 1000, alpha = 0.1, delt = 0.03 1
x4
0.5 0 −0.5 −1
0
1
2
3
4
5 time (sec)
6
7
8
9
10
0
1
2
3
4
5 time (sec)
6
7
8
9
10
1
1.2
1.4
1.6
1.8
2 time (sec)
2.2
2.4
2.6
2.8
3
1
1.2
1.4
1.6
1.8
2 time (sec)
2.2
2.4
2.6
2.8
3
2
x6
1.5 1 0.5 0
1
x4
0.5
0
−0.5
2 1.5
x6
1 0.5 0 −0.5
Figure 4.12: Lower Frequency for Convergent Sinusoidal Input Case of Table 4.5
53 Residual measurements for fault monitoring ( rj(t) = x(n) (t) − xj(t) ) j 1
0.8
0.4
j
measurement residuals ( r (t) )
0.6
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
1
2
3
4
5 time (sec)
6
7
8
9
10
Figure 4.13: Residual Measurements for Conditions of Case 1 of Table 4.1 and Fault in k4 Over the Entire Observed Responses (^x1 (t); :::; x^8 (t)). the entire observation data batch can't simply be used for estimation. Using the entire observed responses for this example illustrates this, as the converged parameter values are (87.92, 960.9, 421.5) after 10 iterations. Clearly, when damage occurs within a set of data measurements, only the portion of the responses that contain the damaged information can be used for successful location and estimation of the fault. First, consider that the fault location is restricted so that damage a�ects only those parameters that were previously estimated. Therefore, the equations that de ne the algorithm remain unchanged. The problem then becomes one of detection and assessment. The location in time of the occurrence of the fault is required in this case and is simple to estimate by monitoring the residuals de ned by Equation 4.34. Several approaches are suggested to accommodate this situation when observations that
54 Residual measurements for fault monitoring ( rj(t) = x(n) (t) − xj(t) ) j 1
0.8
0.4
j
measurement residuals ( r (t) )
0.6
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
1
2
3
4
5 time(sec)
6
7
8
9
10
Figure 4.14: Residual Measurements for Conditions of Case 1 of Table 4.1 and Fault in k4 at t = 5 sec in the Observed Responses. contain non damaged and damaged information. An appropriate weighting, e.g. exponential, can magnify the information containing the post damage responses in the iterative estimations and therefore the t parameters will gravitate more towards their faulty values. Another approach would be to use only the data that was measured after the occurrence of the fault. Di�culty arises here as the particular part of the recursive equations requires the initial conditions of the state variables and would therefore require the position and velocity measurements at the beginning of the post-fault measurements, i.e. just after the fault. Although the 8 position values just after the fault could be extracted from the measurements, the 8 velocity values are most likely not available in real experimental situations. In this case, the recursive equations and linear algebraic equations are reformulated for the case of unknown 8 initial conditions of the velocity. This greatly increases the computational load but eliminates
55 the generation of weighting functions and only requires extension of the already proven quasilinearization approach. More importantly, this unknown initial condition approach could accommodate multiple hardening and/or softening faults in time and be applied recursively to the data to estimate the corresponding changes due to damage in the previously estimated linear and nonlinear structural springs. Now consider a more di�cult and likely situation. When softening or hardening damage occurs in a linear spring whose sti�ness was not previously estimated but known, or when damage results in more added nonlinear terms of known form, e.g. an added cubic sti�ness term, the quasilinearization approach is still successful but requires rede ning the iterative linear di�erential and algebraic equations. When the potential location of damage is known, this reduces the computation requirements as the algorithm is structured to estimate these unknowns. With no knowledge of the location of potential damage, a comparative process where sets of parameters are assumed unknown can be performed. The estimated sets are compared to their previously known values for discrepancies. This would serve as alternative to assuming all parameters are possibly fault sensitive, which again is likely too computationally cumbersome and is likely compromised by mistakes in the derivation. As a tool for identifying a limited number of unknown parameters in damaged and therefore nonlinear higher order structural systems, given the model structure and post damage dynamic response observations, the quasilinearization approach of parameter estimation is reliable. The approach also shows promise in the detection, location and assessment of multiple structural faults in such a model.
Chapter 5
Detection and Isolation of a Dry Friction Fault in a Pneumatically Actuated Air Bearing Mass 5.1 Motivation The detection of dry, or Coulomb, friction in pneumatic linear actuators is pertinent in the increasing number of automated systems that require precision positioning. The dry friction phenomena can interfere with the precision positioning objectives and cause problems like overshooting and force limit-cycling. Although friction can be compensated by modern control algorithms, sudden and unpredictable changes in friction due to, for example, wear and side loading of a pneumatic cylinder cause unacceptable behavior of the positioning mechanism. An on-line detection of dry friction (fault) would greatly facilitate the compensation of dry friction in high precision positioning. Moreover, a fault detection technique for monitoring dry friction would help the detection of changing process conditions in the case of, for example, wear and excessive side loading of a pneumatic cylinder. In this chapter, an experiment is designed in which a servo pneumatic cylinder drives an air bearing mass load that permits the addition of friction on-line. By design, the addition of friction in the experimental apparatus is equivalent to an increase in the piston dry friction. It therefore serves to design a simple and e�ective dry friction fault detection scheme for this system. Furthermore, a fault detection of dry friction is developed that is able to monitor Coulomb friction by simply adding an acceleration sensor to the load of the pneumatic cylinder. Dynamic models of the behavior of the load and pneumatic
56
57 cylinder are obtained by system identi cation techniques and a recursive least-squares estimation technique is used to monitor dry friction model parameters. Numerical validation of the FDI scheme is also provided.
5.2 The Pneumatic Actuation of an Air Bearing Mass A schematic of the experimental precision positioning apparatus discussed in this chapter is given in Figure 5.1. Table 5.1 displays the properties and dimensions of the components and hardware in the apparatus. The voltage supplied to the apper servo-valve Vin directs the
Pneumatic Actuation of Air Bearing Mass Assembly Ps
Vin +
flapper
Flapper Servo-valve
Ps Pe
Pu1
Pneumatic Cylinder
Pu2
chamber ports
..
x, x
chamber 2
chamber 1 P1
rod
Air Bearing Mass
piston
P2
m Ff
air exhaust
L
Figure 5.1: Experimental Apparatus of an Air Bearing Mass with Pneumatic Actuation.
apper and hence the ow of air to the two piston chambers. When the apper creates a pressure di�erence in the chambers, the piston and rod are forced into motion and in turn drive the air bearing mass. The voltage to the valve directly regulates the up stream pressures, Pu1 and Pu2 . By design the valve is always exhausting some of the ow to the atmosphere, which remains at atmospheric or exhaust pressure Pe = 101 kPa. The up stream pressures from the chambers, Pu1 and Pu2 , are dynamically related to the chamber pressures P1 and P2 due to the ow through the chamber port ori ce, where the cross-sectional area is small compared to the chamber and tubing areas. The air bearing mass is designed to permit the addition of dry friction on-line. The mass is two hollowed out sections of aluminum block bolted together with a supply hose port in
58 Table 5.1: Dimensions and Properties of Components and Hardware Dyval Single Stage Pneumatic Valve Model 1-SP Operating Pressure 80 - 160 psi Temp. Range 40oF - 160oF System Filtration Coalescing + 25 micron particulate Maximum Input Voltage � 5 Volts (for parallel connection) Pressure Recovery 80% Phase Lag < 90o at 200 Hz, blocked port Hose Output Ports 1/4 inch Quick connect Dimensions 2 inch � 2.165 inch base, 2.22 inch height Tri-Star Arrow Coalescing Filter Model F55 Maximum Pressure 250 psi Temp. Range 40oF - 200oF Kistler Piezo Instrumentation Accelerometer and Charge Ampli er Model 8632B50 Range � 50 g (g = 9:807 m=sec2) Sensitivity at 100 Hz 3 g rms, 101.4 mV/g Mounted Resonant Freq. 22.0 kHz Macro Sensors DC 750 Series DC-Operated LVDT Model DC 750-1000 Input Voltage � 15 Volts DC Full Scale Output � 10 Volts DC Measurement Range � 1.000 inch Scale Factor 10 Volts DC/inch Length 8.24 inch body, 3.45 inch core Omega PX236 Series Pressure Transducer Excitation 10 Vdc regulated, 16 Vdc max Null O�set � 2 mV Sensitivity 1 mV/psi Airpel Anit-Stiction Air Cylinder Model E9, double acting Bore Size 0.366 inch Operating Pressure 0.2 - 100 psi Stroke 5.0 inch Mass piston/rod 11.3 grams complete unit 79.3 grams Pressure Ports 10-32 connections Rod Diameter 0.125 inch Mount Diameter 0.375 inch Outter Diameter 0.562 inch Mounting Surface (Aluminum) Dimensions 21.9 inch length, 6 inch width 0.5 inch thickness Slot Dimensions 8 inch length, 0.375 inch width Air Bearing Mass (Aluminum) Dimensions given in Figure 5.2, Figure 5.3 Mass 220.1 grams
59 the top section and 36 small exhaust holes in the bottom section. The holes were made near the corners of the bottom section of the block to promote stability of the air bearing mass when in motion. Engineering drawings of the two sections of the air baring mass are given in Figure 5.2
Figure 5.2: Engineering Drawing of the Top Section of the Air Bearing Mass. and Figure 5.3. The supply pressure Ps to the mass controls the exhaust ow from the bottom holes and therefore the amount of dry friction contact between the mass and the surface that the mass rides on. At a critical Ps value the mass makes contact with the surface. By reducing Ps below the critical value, the amount of dry friction increases and reaches a maximum value when Ps is cut-o�. A wide frontal view of the experimental precision positioning set up is shown in Figure 5.4. This image shows the pre-valve air ltration system on the left, the Dyval pneumatic servovalve, the Airpel anti-stiction air cylinder, the constructed air bearing mass apparatus and signal measuring and monitoring devices. Note that the piston rod alignment is not perfectly parallel
60
Figure 5.3: Engineering Drawing of the Bottom Section of the Air Bearing Mass. with the plane surface on which the mass rides. There exists, therefore, a preferred range of motion of the mass at which any side-loading of the piston rod is minimized. Binding of the mass's leading edge on the piston mount side is observed for 0.5 inches of motion nearest the mount. At the far end of the stroke, the piston aimed high and created downward side loading. It is also desirable to avoid bottoming out the piston, i.e. making contact between the cylinder's end and piston while in use. Therefore, the preferred range of motion is approximately 0.75 to 1 inch from either end of the stroke. All of the testing is done in this preferred range to investigate the a�ects of variable air supply and input while minimizing the afore mentioned side loading a�ects. A close up of the assembly is in Figure 5.5, showing from the left the valve, cylinder and mass more clearly. The pressure sensors located just downstream from the valve ow outports are used to compute the servo voltage to up stream pressure frequency response.
61
Figure 5.4: Wide Frontal View of Experimental Precision Positioning Set Up.
Figure 5.5: Close Up of Frontal View of Experimental Precision Positioning Set Up. A top close up view of the air bearing mass is shown in Figure 5.6. This gure contains a clear view of the supply air hose to the air bearing mass and the rod of the mounted pneumatic cylinder, which threads directly into the mass. The measured signals of interest for identi cation and detection besides the voltage input Vin to the servo-valve are the position x and acceleration
62
Figure 5.6: Top Close Up View of Air Bearing Mass.
x of the air bearing mass. Mounted on the mass are an accelerometer on the top for measuring x and a linear variable di�erential transformer (LVDT) opposite the cylinder rod for measuring x. The mass rides above a leveled smooth aluminum surface with an exhaust channel cut in the
direction of motion to escape the air from the mass. It is observed that escaping the air ow through this channel enables a smoother transition to friction. As the air takes the channeled path of least resistance, it is not compressed as much by the weight of the mass, resulting in relatively even and increasing contact as the supply pressure is reduced. The height of the cylinder is set to thread the rod into the mass when the mass is exhausting enough air to make no contact with the level surface.
5.3 Procedure for Dry Friction Fault Detection In order to model the dynamic behavior of the valve, pneumatic cylinder and air bearing mass load, system identi cation techniques are used. Collecting frequency domain observations from the valve input Vin to the position x and acceleration x of the air bearing load, linear models of the dynamic behavior are estimated via black box modeling identi cation techniques. The models are used to simulate the (ideal) response of the precision positioning apparatus in the case of no-friction. Further, these models are used for the design and development of lters and a recursive estimation approach to monitor and detect dry friction changes. The key steps are:
63
� Investigate an analytically derived dynamic model of the pneumatic cylinder and the air bearing mass.
� Experimentally obtain a dynamic model from servo-valve voltage input to acceleration of the air bearing mass.
� Explore the dynamic relationship between the measured and modeled acceleration of the mass and a model of the dry friction force.
� Implement on-line estimation of the friction model parameters for monitoring and friction fault detection.
In Section 5.4 the analytic model of the system is brie y derived to reveal the empirical nonlinearities and degree of the system. Frequency response measurements of the servo valve voltage input to the position and acceleration of the mass, under no added friction conditions, are given and discussed. Also, a discrete fourth-order model (transfer function) is t to the frequency response data to simulate acceleration of the air bearing without friction for a given servo voltage input. Section 5.5 details how friction detection is possible by monitoring acceleration. Specifically, it is shown in Section 5.5.2 that the friction force is dynamically related to the di�erence between the measured and simulated (non friction) accelerations, called the acceleration residual. In Section 5.6 an experimentally based model between friction and acceleration is designed and implemented on-line. In Section 5.6.1 a simple viscous and coulomb friction model is employed to facilitate identi cation and detection of the friction in terms of the model coe�cients. A prediction error approach [4] is used to model the dynamic relationship between the friction force and the acceleration residual, using an output error optimization in Section 5.6.2. The assumed friction model is incorporated with this lter in Section 5.6.3 and the procedure is implemented by recursive least-squares estimation of the friction model parameters in Section 5.6.4. Simple threshold decision logic is employed to detect the dry friction fault online. Results of the scheme are given in Section 5.7. First, the ltering and parameter estimation detection procedure is applied as a stand alone scheme in a numerical analysis. In Section 5.7.1, the scheme is applied to a second order model generated in Matlab Simulink [42]. In Section 5.7.2, experimental results are given for a wide range of voltage inputs and for varying conditions of added dry friction are given in Section 5.7. Conclusions are discussed in Section 5.8.
64
5.4 Dynamic Modeling of the Pneumatically Actuated Air Bearing Mass A fourth-order highly nonlinear state-space model of a rodless pneumatic actuator driven by a four-way servo-valve is derived by Drakunov et al. in [43]. This analytic model is modi ed to include the actuation rod and extended to the apper servo-valve and air bearing mass apparatus employed in this experiment, as shown in Figure 5.1. A discrete fourth order model is t to the transfer function from servo voltage input to mass acceleration output by weighted least-squares.
5.4.1 Analytic Model The model developed by Drakunov evolves from the landmark text in modeling valve controlled pneumatic systems by Blackburn et al. [44] and is consistent in other sources [45], [23], [25], [46]. Assumptions in the pneumatic dynamics include an ideal equation of state (ideal gas equation), isentropic valve and chamber port ori ce ow and isentropic thermodynamic control volume, or chamber, behavior. Air leakage between the two chambers and from the chamber to the atmosphere is assumed and included in the air bearing dynamics as a non dimensional coe�cient � that e�ectively reduces the cross-sectional chamber areas. The assumption in the air bearing dynamics is that the piston, rod and mass combined are one rigid body and the contact friction between the piston and rod and cylinder casing is negligible. Combining the continuity equation, isentropic thermodynamic control volume relationships and a piecewise isentropic ori ce
ow function, the actuator state-space model is given by
i h p dP1 =
RT A� f ( � ) ? P A x _ + 1 2 2 1 1 1 dt V10 + A1 x h i p dP2 =
P A x _ + RT A� f ( � ) 2 2 2 2 dt V20 ? A2 x 2 2
(5.1) (5.2)
and the air bearing mass state-space model is given by
dx = x_ dt dx_ = A1e P ? A2e P ? 1 F dt m 1g m 2g m f where the states are de ned as
P1 P2 x x_
Absolute piston pressure in chamber 1 Absolute piston pressure in chamber 2 Position of the piston rod / air bearing Velocity of the piston rod / air bearing
(5.3) (5.4)
65 and the functions in the models are de ned as 8 ?1=2 < �i Tiu Piu Cd f1?Pi ; Piu � when �i > 0 f2 (�i ) = : � ? �i T ?1=2 Pi Cd f1 Piu ; Pi when �i � 0 i �i = sgn(Piu ? Pi ) � �( ?1)= Ti = Ti0 PPi i0
8 �? �1=2 � � �P � > 2 = ? (
+1)= < ? Pd =Pu when Pd > Pcr � =� P =P f1 P d = > 1 2 d u u :1 when Pd � Pcr � � � ? � � �1 = 2 =( ? 1) 1=2 ; �2 = 2=( + 1) ( +1)=( ?1) 1=2 ? � P = P r = P 2=( + 1) =( ?1) cr
u crit
u
Aie � Ai (1 ? �i ) ; Pig � Pi ? Pe : The coe�cients and variables are de ned as
A Ai Aie Cd Ff f1 i m Pd Pi0 Piu Pe rcrit R L Ti Ti0 Tiu Vi0
�1 ; � 2 �i
Cross-sectional area of chamber ports Cross-sectional area of chamber i E�ective cross-sectional area of chamber port i Chamber port discharge coe�cient (Cd = 0:85) Dry friction force (positive to the left) Compressible ori ce ow function Control volume or chamber index(i = 1; 2) Combined mass of piston rod and air bearing Absolute downstream pressure Absolute initial pressure of chamber i Absolute up stream pressure of chamber i Absolute exhaust and atmospheric pressure (Pe = 101 kPa) Critical pressure ratio Ideal gas constant Piston stroke length Absolute temperature of chamber i Absolute initial temperature of chamber i Absolute up stream temperature of chamber i Initial Volume of chamber i, including dead air Ratio of speci c heats( = 1:4 for air) Compressible ori ce ow constants Leakage coe�cient of chamber i
(5.5) (5.6) (5.7) (5.8) (5.9) (5.10) (5.11)
66 Over the pressure ranges and temperatures of interest for air, it can be assumed (see [25, page 736]) that the temperature of the two chamber remains constant and equal to the supply temperature (T = 294 K). Applying Fleigener's equation, as in [45],[46], the ow function is simpli ed by assuming subsonic ow in both directions at the chamber ports (Pd > Pcr ) and the state equations become
dP1 = ? P1 x_ + C f (Pu1 ; P1 ) 1 dt x x dP2 = P2 x_ + C f (Pu2 ; P2 ) 2 L?x dt L?x
(5.12) (5.13)
where the ow function is de ned as
� � � �1=2 f (Pui ; Pi ) = �1 Pu PPd 1 ? PPd u u 8 < P and Pd = Pui ; if Pui � Pi Pu = : i Pui and Pd = Pi ; if Pui > Pi
(5.14) (5.15)
and the coe�cients are de ned as
p Ci = 2 �2 Cd AA RT; i = 1; 2: i
Equation 5.12 and Equation 5.13 reveal the complex dependence of the chamber pressures on piston rod / mass position and velocity and up stream pressure even after assuming the most simpli ed conditions. The high degree of nonlinearity in this fourth-order system indicates the di�culty in attempting to identify all of the model parameters with a su�cient level of certainty. Attempting to analytically isolate the friction force from the other dynamics in the system would then include signi cant parametric uncertainty. However, the identi cation and detection of friction as a fault requires an isolation of the friction signal that is robust to these large parametric uncertainties.
5.4.2 Experimental Model System identi cation is used to experimentally model the dynamics from the valve input Vin to the position x and acceleration x of the air bearing mass. A linear dynamic time invariant model of the system is found by tting the frequency response from the voltage input to measured position. The position measurement is used as it is more reliable in the low frequency range than piezo accelerometer measurements. Also the use of the position signal comes at no extra cost since position sensing devices commonly accompany high precision positioning mechanisms for feedback control purposes.
67 Experimental data acquisition An LVDT [47] is used to measure the position of the air bearing load. The LVDT can measure accurately to 0.001 inches and by design is virtually frictionless, as the position sensing core is magnetically suspended in a cylindrical housing. The frequency response of the LVDT / Vin frequency response for Vin = 0.7 Volts amplitude chirp signal
2
10
0
log mag
10
−2
10
−4
10
−2
10
−1
10
0
10 frequency (Hz)
1
10
2
10
200
phase (deg)
100
0
−100
−200 −2 10
−1
10
0
10 frequency (Hz)
1
10
2
10
Figure 5.7: Amplitude and Phase Bode Plot of Voltage Input to Air Bearing Load Position Frequency Response G(!) voltage input to the load mass position output was generated using a chirp voltage input signal of amplitude 0.7 Volts, a frequency range up to 20 Hz and a record length or frame size of 1024 samples using DSP signal processing software [48]. Figure 5.7 shows a plot of this frequency response (dashed), de ned as G(!). By inspection, this frequency response displays fourth-order dynamics, with a single integrator near 0.2 Hz and three orders of integration around 8-9 Hz. The second derivative of G(!), i.e. [j!]2 G(!), is computed to relate voltage input to acceleration of the load and is shown in Figure 5.8. To validate that the accelerometer measurements and the second derivative of the LVDT measurements are consistent in the frequency
68 2nd derivative of LVDT / Vin frequency response for Vin = 0.7 Volts amplitude chirp signal
2
10
1
log mag
10
0
10
−1
10
−2
10
−2
10
−1
10
0
10 frequency (Hz)
1
10
2
10
200
phase (deg)
100
0
−100
−200 −2 10
−1
10
0
10 frequency (Hz)
1
10
2
10
Figure 5.8: Amplitude and Phase Bode Plot of the Second Derivative of G(!) domain, Figure 5.9 shows a match between the two responses for a chirp signal input of amplitude 1 V. The record length is 1024 samples and the bandwidth is 50 Hz. The response measured with the accelerometer required multiplication by a gain (conversion factor ratio) in order for it to match the LVDT measured response. The roll-o� frequency of 10 Hz in these two responses is a result of the valve dynamics, which is now discussed. The up stream pressures P1u ; P2u are shown in Figure 5.1 and are considered the inputs to the analytic pneumatic actuator state-space model previously described. These pressure values respond to the voltage input to the servo-valve Vin as a second order system, as shown by the frequency response in Figure 5.10. The input voltage was a random signal of RMS amplitude 1 V, bandwidth of 200 Hz and a record length of 1024. Intuitively, the voltage controlled apper in the valve behaves like a heavily damped beam, hence second order behavior. For frequencies above 10 Hz, the valve saturates and the up stream pressures, and therefore the
69 Accel / Vin and 2nd derivative of LVDT / Vin freq responses (Vin = 1.0 Volts chirp) 40
magnitude (dB)
30 20
* − LVDT / Vin o − Accel / Vin
10 0 −10 −20 −30 −1 10
0
1
10
10
2
10
frequency (Hz) 200
phase (deg)
100
0
−100
−200 −1 10
0
1
10
10
2
10
frequency (Hz)
Figure 5.9: Frequency Response Match Between Measured Voltage to Acceleration and the Second Derivative of G(!) for a Chirp Input of Amplitude One Volts. chamber pressures, remain essentially constant. Therefore, for voltage inputs that exceed 10 Hz very little motion in the pneumatic cylinder piston and the air bearing load is observed. Below 10 Hz, the upstream pressures are directly proportional to the voltage input. To examine how the pneumatic cylinder and air bearing load system changes for di�erent inputs, Figure 5.11 and Figure 5.12 show the frequency responses measured by the LVDT and the accelerometer for chirp input signals of varying amplitude. Although only the variations in acceleration measurements are of concern for the detection scheme, from a hardware redundancy stand point it is good to check that the accelerometer measurements are consistent with the LVDT measurements under these variable input conditions. For the LVDT measurements, the maximum input voltage of 1.5 V is based on the maximum range of the LVDT of � 1 inch. The minimum voltage of 0.7 V is the smallest voltage observed to yield a large enough response of
70 Pin / Vin frequency response
0
10
−1
log mag
10
−2
10
−3
10
−4
10
−1
10
0
10
1
10 frequency (Hz)
2
10
3
10
200
phase (deg)
100
0
−100
−200 −1 10
0
10
1
10 frequency (Hz)
2
10
3
10
Figure 5.10: Voltage Input to Up Stream Pressure Frequency Response the air bearing to be able to detect friction. The same voltage amplitude range is applied for the accelerometer measurements, except that a higher voltage was used as a maximum. These gures reveal the highly nonlinear dynamics present in the system. The measurements are insensitive to variations in amplitude of a chirp input for a frequency range of 1 to 3 Hz and increasingly sensitive from 4 Hz up to the resonant 8-9 Hz. Description of model tting to frequency response The parametric discrete time model is curve tted by weighted least-squares to the frequency response of the voltage input to the mass position output. The t by estimation of the model parameters is done in the frequency domain model identi cation program FREQID [49], [50]. The interface permits selection of the weighting function and model order during the estimation of a parametric model. The selected order of the discrete time tted transfer function model is [4; 1; 1], to t
71 LVDT / Vin freq responses for Vin = 0.7,1.0,1.3,1.5 Volts amplitude chirp signal
2
10
0
log mag
10
* − 0.7 Volts −2
10
o − 1.0 Volts x − 1.3 Volts + − 1.6 Volts
−4
10
−6
10
−1
10
0
1
10
10
2
10
frequency (Hz) 200
phase (deg)
100
0
−100
−200 −1 10
0
1
10
10
2
10
frequency (Hz)
Figure 5.11: Change in Frequency Response of Voltage to Position for Chirp Signal Input of Varying Amplitude. to the fourth-order frequency response in Figure 5.7. The model takes the form b1 z ?1 (z ?1 ) u(t) = y(t) = Gb(z ?1)u(t) = B A(z ?1 ) 1 + a1 z ?1 + � � � + a4 z ?4 u(t); where y(t) = x^(t); u(t) = Vin (t);
(5.16) (5.17)
x^(t) is the (non friction) modeled load position and b0 is set to 0. By setting b0 to 0, the number
of parameters used to t the model to the frequency response is reduced, which in this case resulted in a better t than a model order of [4; 2; 0] that includes b0 as a free parameter. The transfer function Gb can be written
? � Gb(z ?1 ) = Gb ej!T ; � ;
(5.18)
where � is the parameterization of the transfer function (b1 ; :::; a4 ) and T is the discrete sample
72 Accel / Vin freq responses for Vin = 0.7,1.0,1.3,1.6 Volts amplitude chirp signal
0
10
* − 0.7 Volts o − 1.0 Volts
−1
log mag
10
x − 1.3 Volts + − 1.6 Volts
−2
10
−3
10
−4
10
−1
10
0
1
10
10
2
10
frequency (Hz) 200
phase (deg)
100
0
−100
−200 −1 10
0
1
10
10
2
10
frequency (Hz)
Figure 5.12: Change in Frequency Response of Voltage to Acceleration for Chirp Signal Input of Varying Amplitude. time. The weighted least-squares t is generated from the cost function
h ? i � min
Gb ej!T ; � ? G(!) W (!)
; 2 �
(5.19)
where W (!) is the weighting function. The transfer function Gb(z ?1 ) is generated using a sample frequency fs = 256 Hz, or a sample time ts = 0:00390625 sec. Furthermore, all of the measured voltage and acceleration signals and modeled acceleration signals captured for detection are also sampled at this frequency. Note that fs captures all of the dynamics of the system, as Figure 5.9 shows a magnitude roll-o� well below the half-sampling frequency of 128 Hz. The tted transfer function model from the voltage input to the no friction load position is shown in a solid line on top of the frequency response in Figure 5.13. The order of the zeros in the model, i.e. the order of B (z ?1 ), was kept to two so that in taking the second derivative
73 LVDT / Vin frequency response and fitted model (Vin = 0.7 Volts chirp)
2
10
0
log mag
10
−2
10
−4
10
−2
10
−1
10
0
10 frequency (Hz)
1
10
2
10
200
phase (deg)
100
0
−100
−200 −2 10
−1
10
0
10 frequency (Hz)
1
10
2
10
Figure 5.13: Amplitude and Phase Bode Plot of Voltage Input to Air Bearing Load Position Frequency Response G(!) (dashed) and fourth-order model tted on the data Gb(z ?1 ) (solid) of this model, the resulting transfer function from voltage input to non friction air bearing load acceleration is causal (proper). This transfer function is shown in Figure 5.14 on top of the frequency response given in Figure 5.8. For implementation in the detection scheme, the transfer function Gb(z ?1 ) is converted to a discrete state-space model and entered as a block in Matlab Simulink [42] to generate x^(t) for Vin signals. Further, two numerical ( nite-di�erence) derivative blocks are used to generate x^(t). By nite-di�erence, the modeled signal delays the measured acceleration by two sample time steps. To account for the delay, the modeled signal is shifted forward in time by two sample time steps. While a linear model simply shifts up for an increase in voltage input amplitude, the pneumatic cylinder and air bearing load apparatus behave nonlinearly for such increases, as shown in Figure 5.11 and Figure 5.12. To match the amplitudes of the non friction measured
74 2nd derivative of LVDT / Vin freq response and fitted model (Vin = 0.7 Volts chirp)
2
10
1
log mag
10
0
10
−1
10
−2
10
−2
10
−1
10
0
10 frequency (Hz)
1
10
2
10
200
phase (deg)
100
0
−100
−200 −2 10
−1
10
0
10 frequency (Hz)
1
10
2
10
Figure 5.14: Amplitude and Phase Bode Plot of the Second Derivative of G(!) (dashed) and Gb(z ?1 ) (solid) and modeled accelerations, a scaling is built into to the detection scheme. This scaling accounts for the conversion factor ratio and the a�ect of input amplitude variations. The scaling takes place in the time domain and after a transient mismatch, do to non matching initial conditions. A simple linear model tted to the highly nonlinear dynamics of the pneumatic cylinder and air bearing mass load apparatus is implemented to generate a non friction acceleration signal for a valve voltage input. Robustness in matching the measured and modeled non friction accelerations with respect to varying the voltage input amplitude is incorporated as a scaling in the detection scheme. The model and scaling provide a means of comparison of fault free and fault sensitive measurements (accelerations), a prerequisite for detection of a friction fault in the experimental precision positioning apparatus, and has the added advantage of being somewhat robust with respect to varying inputs (voltages).
75
5.5 Friction Detection by Monitoring Acceleration 5.5.1 Motivation As was stated, detection of dry friction in a servo pneumatic application is desirable. In this detection scheme, only the voltage input and measured and modeled accelerations of the air bearing mass are required to design the dynamic lter and monitor the nonlinear dry friction force on-line for fault detection. The advantage of requiring the measurement of only acceleration is that inexpensive, reliable accelerometers are available and easily added to the load of a precision positioning apparatus.
5.5.2 Dynamic Relation Between Friction Force and Measured Acceleration The non friction acceleration signal x^(t) provides the non fault information with which the fault sensitive measurements, i.e. the measured acceleration x(t), may be compared. As friction force is proportional to acceleration, it is intuitive that the di�erence in these signals would capture a friction fault in some way if it occurs. The acceleration residual is de ned as
xr , x ? x^:
(5.20)
This signal alone can capture any unmodeled faults such as dry friction. However, to achieve the fault detection and isolation objective, this signal must somehow be reduced to a signal or signals that are sensitive to friction faults and relatively robust to other possible sensor, actuation or process faults. To relate the friction force to this residual, a qualitative description about the behavior of the air bearing dynamics with and without friction is helpful. The air bearing mass is driven by the piston of a pneumatic cylinder that has sti�ness and damping properties. As discussed, the cylinder dynamics including the sti�ness and damping properties are highly nonlinear with and without the addition of friction. In this qualitative discussion a simple linear forced mass-spring-damper system is investigated to observe that there exists a dynamic relation between an added friction force and an accleration residual in systems that have sti�ness and damping properties. The linear system is given by
m x1 = F ? k x1 ? c x_ 1 ;
(5.21)
where x1 represents the position, x_ 1 the velocity and x1 the acceleration of a mass m. Clearly, by no means does this model represent the pneumatic cylinder and mass load dynamics with or without friction, but it does provide useful insight into a friction to acceleration residual relation
76 in the pneumatic cylinder experiement. When a dry friction force is present, the dynamics of the system in Equation 5.21 change to
m x2 = F ? k x2 ? c x_ 2 ? Ff ;
(5.22)
where x2 represents the position, x_ 2 the velocity and x2 the acceleration of the mass subjected to the added dry friction force Ff . Subtracting Equation 5.22 from Equation 5.21 yields
m xe + c x_ e + k xe = ?Ff ;
(5.23)
where xe = x1 ? x2 , and so on. The friction force Ff is positive when acting to the left and xe is e�ectively an acceleration residual in Equation 5.23. Therefore, Equation 5.23 shows that a dynamic relation exists between the dry friction force Ff and the acceleration residual xe . Note that the existence of this dynamic relation holds even if the assumption that the sti�ness and damping coe�cients do not change with the added friction force is invalid. With this insight, it is left to model the dynamic relation between a measured friction force and the accleration residual in the experimental test. In Section 5.6.2 this dynamic relation is generated as a lter in the highly nonlinear pneumatic cylinder and mass load dynamics with friction. This gives the freedom to select a friction model based upon the measured states of the air bearing motion, i.e. the acceleration measurements or computed velocity or displacement values from this measurement. For the friction model employed here, only velocity measurements are needed. A third-order high pass digital Butterworth lter is used to eliminate any DC content in the measured acceleration signal and a discrete time integrator is used in Matlab Simulink [42] to compute the measured velocity.
5.6 Experimentally Based Modeling Approach >From the analysis performed in Section 5.5 it is clear that a dynamic relationship exists between the acceleration residual xr and the dry friction force Ff . This analysis is valid only for a single mass-spring-damper system as discussed in Equation 5.21 - Equation 5.23. In more complicated precision positioning systems, such as the experimental apparatus of Section 5.2, the relation between friction and xr becomes more complicated. In order to discuss the more complicated relation, rst we analyze a friction model in Section 5.6.1. The dynamic model between friction and xr is then discussed in Section 5.6.2.
5.6.1 Assume a Friction Model For a dynamic system undergoing slipping dry friction, i.e. dry friction that has a comparatively low sticking and high slipping characteristic, the coulomb and viscous friction
77 model has been validated in [30], [29], [41], with experimental validation in [36]. The friction model takes the form Ff = � jxx__ j + x;_ (5.24) where the friction force ?Ff and velocity x_ are assumed positive to the right. The high slip low stick condition is achievable in this experimental precision positioning apparatus and it is also possible to add friction of high stick character. The success of the detection scheme under both of these conditions is examined in Section 5.6.4. The small amount of sticking present in the high slip cases will be modeled within the estimated dynamic lter. The chief advantage of this model is that it is linear in the parameters � and and therefore facilitates identi cation. By recursively estimating these parameters with least-squares the friction fault level in the precision positioner is isolated and monitored for detection.
5.6.2 Identi cation of Dynamic Friction Signal Filter The dynamic model, or lter, between the friction force and the acceleration residual is written as an output error model, given as
�
�
y(t) = B (q?1 )=F (q?1 ) u(t ? nk) + e(t); where y(t) = xr (t); u(t) = Ff (t); � � [ nb; nf; nk ] = order of B (q?1 ); order of F (q?1 ); model delay order ;
(5.25) (5.26) (5.27)
and e(t) represents the error between the acceleration residual and the ltered friction signal. The prediction error estimate of Equation 5.25 nds the parameters in B (q?1 ) and F (q?1 ) that minimize the L2 norm of e(t), given y(t) and u(t). With these parameters, the dynamic lter simulates the acceleration residual for a given friction signal. Since friction lags the acceleration residual, the order of B (q?1 ) is higher than that of F (q?1 ). For this problem, the orders selected are [nb, nf , nk] = [4, 3, 0].
5.6.3 Incorporation of Friction Model with Model Based Filter The friction fault signature is de ned here by incorporating the friction model with the dynamic lter. Substituting Equation 5.24 into Equation 5.25, � � x_ ? 1 e (5.28) xr (t) = Ge (q ) � jx_ j + x_ + e(t): Normalizing the lead coe�cient in the friction model, � � x_ ? 1 (5.29) xr (t) = Ge (q ) jx_ j + f x_ + e(t) = Ge (q?1 ) xf (t) + e(t):
78 where xf (t) represents the friction signal after normalization of the coulomb term coe�cient and the constant f represents the relative amount of viscous to coulomb friction when the friction fault is present. It remains to estimate f and Ge in the presence of a friction fault. A window of data in time, comprised of faulty velocity and acceleration measurements and a modeled acceleration signal, de nes the signals in Equation 5.29. Let the data window time interval be de ned as t � [t1 ; t2 ]. The parameter f is iterated through the values [0:0; 10:0] in steps of 0:2 and for each value, the parameters in Ge are estimated by least-squares with the cost function e(t), i.e. the estimated parameters minimize
x (t) ? G (q?1 ) x (t)
r e f L (t ;t ) : 2 1 2
(5.30)
The set of Ge parameters and corresponding value of f that result in the smallest L2 (t1 ; t2 ) norm of the error e(t) de ne, respectively, the dynamic lter and the relative level of viscous friction for the given window of data. Clearly then, for each servo voltage input and corresponding measured and modeled signals in which a friction fault occurs, a dynamic lter and associated level of viscous friction f are generated. For this set of data, the lter parameters are xed and the normalized friction model coe�cients (1; f ) serve as the signature values to which the recursively estimated friction model parameters are compared.
5.6.4 Implementation In this section a procedure is formulated for recursively estimating the friction model parameters and monitoring them for friction fault detection. Equation 5.29 can be rewritten in the form
�
�
xr (t) = Ge (q?1 ) jxx__ j + f x_ + e(t) � � = Ge (q?1 ) jxx__ j + f Ge (q?1 ) [x_ ] + e(t);
(5.31) (5.32)
where Ge and f are de ned. The normalized friction model coe�cients (1; f ) t the ltered measured velocity signals in Equation 5.32 to the acceleration residual in a least-squares sense. The t is generated over a time domain window of data in which a friction fault is present. To t ltered measured velocity signals to the acceleration residual signal on-line, these parameters can be estimated by least-squares using current windows of data, i.e. the parameters can be recursively estimated. Now the friction model coe�cients are non-constant and are expected to vary slightly within and largely in transition between the non friction and friction regimes. To
79 account for time varying coe�cients, Equation 5.32 is modi ed by where;
y(t) = �1 (t) g1 (t) + �2 (t) g2 (t) + e(t); y(t) = xr (t); � � g1(t) = Ge (q?1 ) jxx__ j ;
g2(t) = Ge (q?1 ) [x_ ] ;
(5.33) (5.34) (5.35) (5.36)
and �1 (t) and �2 (t) represent the time varying coulomb friction and viscous friction coe�cients, respectively. As was stated, these parameters ought to converge to their respective signature values (1; f ) when the fault is present. These values indicate the relative level of Coulombic to viscous friction, respectively. It is important to note that prior to the fault, the parameters do not have any physical interpretation. Rather, they match the small non friction acceleration residual and the ltered measured signals g1 (t) and g2(t). Also, as the fault is added over a small nite window of time, the t parameters in this transition are expected to display transient behavior that again has no physical interpretation. The physical interpretation of the two parameters remains solely in their signature levels, exhibited when the fault is present and after some transient behavior. To implement the recursive estimation, Equation 5.33 is rewritten as
y(t) = g(t)T �(t) + e(t); where g(t)T = [ g1(t); g2(t) ] ; �(t)T = [ �1 (t); �2(t) ] :
(5.37) (5.38)
For a current window of y(t) and g(t) data t � [ta ; tb ], the well known least-squares estimate �^(tb ) of the parameter vector �(tb ) at window time tb is �^(t ) = � g(t) g(t)T �?1 g(t) y(t); t � [t ; t ]: (5.39) b
a b
Alternatively, an exponentially weighted forgetting factor could be used on signals y(t) and g (t) instead of using current windows of data. However, this slows the estimation process down as time grows since all of the data from the beginning of the test is accounted for in exponential weighting, and speed of estimation is critical for on-line implementation. The detection logic contains a non friction parameter value threshold level and compares the estimated parameters to the signature values. Simply, a fault is detected once the estimates exceed the thresholds and the parameters are monitored for tracking to the signature values. The parameters would likely exit the pre-fault threshold levels in the event of di�erent types of faults. Successful tracking of the parameters to the signature values could therefore be considered as success in detection and isolation of the dry friction fault. The threshold levels are computed as the average plus and minus three times the standard deviation of an initial set of estimated parameter values �^ that are known to be friction free.
80 Numerical validation of the friction fault isolation and detection scheme is rst given. A second order model, or mass-spring-damper model if you prefer, is generated in Matlab Simulink [42]. A copy of the model is subjected to a friction fault half way through the time interval of observation. In this way the simulated acceleration signals and velocity signal (from the fault sensitive model) provide a means of validating the ltering, estimation and detection components of the scheme developed in the previous sections. A few words are in order about some properties of the parameter estimates. A property of recursive estimation of variables that are subject to random processes such as noise is that they exhibit variance. The variance is a function of the data batch length, the interval between data batches, and naturally the noise present in the batches themselves. Although the rst two of these elements can be controlled in the detection scheme, the noise level cannot. Moreover, the signal noise levels are highly sensitive to varying input types and levels of friction, particularly in the experimental case. So, it is expected to observe di�erent levels of parametric variance in the highly nonlinear system of the experiment for test cases that investigate varying input types, levels of friction, etc. A property of convergence of recursively estimated random variables is that the estimates remain bounded. Therefore, convergence of the parameters refers to boundedness. Tracking performance of the parameters to the signature values refers to the variance level present in their estimates, prior to and after the fault occurs. When a fault occurs, it immediately infects the pre fault data to which the parameters were t. Once the data batch contains solely faulty information, the parameters generally track to their signatures. It is expected therefore to observe transient behavior in the parameter estimates for a period after the fault occurs. It is important to note that the recursive estimation of the lter parameters is a nonlinear process, i.e. the estimation has its own nonlinear dynamics. Moreover, the parameters are mapped to data that is also nonlinear since it contains information about the friction, once the fault occurs. Therefore, estimates in the transient range are likely to behave spuriously, e.g. exhibit peaks in amplitude.
5.7 Dry Friction Fault Detection Results In Section 5.7.1, the ltering, parameter estimation and threshold detection steps of the FDI scheme are validated in a numerical experiment. The application of the entire scheme to the designed experiment is then detailed in Section 5.7.2.
81
5.7.1 Numerical Validation A general linear second order model, that could represent for example a liner massspring-damper, was generated in Matlab Simulink [42]. The model was copied and the copied model, under the same loading conditions, was subjected to three di�erent friction faults. The added faults were viscous friction, coulombic friction, and a combination of both. The results of these three cases are given as test cases 1, 2 and 3 respectively. The common time length of each test was 20 seconds and each fault was initiated at time equal to 10 seconds. To better represent experimental conditions, uniformly distributed random noise was added to the acceleration and velocity signals generated by the fault sensitive model. The noise amplitude range was set at �2% of the peak value of the signals as measured before the fault. In the description of the parametric values related to the simulations, units are omitted for convenience. The input, or forcing function, applied for each test was a sinusoid of amplitude 3.0 and frequency 4 Hz. The nominal sti�ness k and damping c in the models was 1.0 and 2.2, respectively. In the results that follow, the fault sensitive acceleration and velocity signals are considered as \ measured" signals and are therefore plotted in dashed lines to follow the convention of this thesis. Similarly, the fault fault free acceleration signal is considered to be a \modeled" signal and is therefore plotted in solid lines. Any generated signal, such as the parameter estimates, is also plotted in solid lines. For test case 1, an added viscous friction fault was simulated by increasing the nominal viscous friction coe�cient c from 2.2 to 9.2. A plot of the fault sensitive acceleration signal, i.e. the signal from the model subjected to the fault, is shown in Figure 5.15. The acceleration signal changes little in this case as a result of the fault. To see the detection of the fault, Figure 5.16 shows the evolution of the recursively estimated friction model parameters �1 (t) and �2 (t) for this test case. The parameters remain near zero with low variance prior to the fault and escape their thresholds immediately after the fault is initiated. In this case, the coulombic parameter �1 (t) naturally remains small and the viscous parameter �2 (t) tracks to a signature value of 10 at 1.6 seconds after the fault. The signature value of 10, de ned in the dynamic lter generation, is not exactly the known viscous friction coe�cient value of 9.2. So, for physical interpretation, one must consider that the linear model( lter) tting will incorporate some bias into the estimated parameters. As expected, a peak is observed in the transient range of estimation. The parameters exhibit low variance around their signatures. Note that without the noise added, it was observed that the variance goes to zero. For test case 2, an added coulombic friction fault was simulated by adding this term (linear dependence on the sign of velocity) in the dynamics of the fault sensitive model. The friction coe�cient was given a value of 1. A plot of the fault sensitive acceleration signal is
82 Fault sensitive acceleration signal 4
|−−> Viscous friction fault 3
Acceleration (m/sec2)
2
1
0
−1
−2
−3
−4
8.5
9
9.5
10
10.5
11
11.5
12
time (sec)
Figure 5.15: Fault Sensitive Acceleration for Simulated Test Case 1 shown in Figure 5.17. The a�ect of the fault in the acceleration signal is more evident in this case than in test case 1. Figure 5.18 shows the estimated friction model parameters for this test case. Again, the parameters remain near zero with low variance prior to the fault and escape their thresholds immediately after the fault is initiated. The viscous parameter remains small (signature of 0.2) and the coulombic parameter tracks to a signature value of 1 at 1.5 seconds after the fault. In this case, the signature accurately represented the physical parameter in the model. Also, the parameters again exhibit low variance around their signatures. Lastly, for test case 3, a combined coulombic and viscous friction fault was added to the dynamics of the fault sensitive model. The fault coe�cients were both set to 1. A plot of the fault sensitive acceleration signal is shown in Figure 5.19. The a�ect of the fault in the acceleration signal is nearly the same as that observed in test case 2 (Figure 5.17). Figure 5.18 shows the estimated friction model parameters for this test case. Again, the parameters remain near zero with low variance prior to the fault and escape their thresholds immediately after the fault is initiated. The coulombic and viscous coe�cients track to their signature values of 1 and 1.5, respectively, at 1.5 seconds after the fault. The parameters again exhibit low variance around
83 Ff = theta1*sgn(vel) + theta2*vel for Simulations 14
x − theta 1 signature, thresholds o − theta 2 signature, thresholds
parameters, thresholds and signature values
12
theta 2
10 8 6 4
theta 1
2 0 −2 −4 −6 2
4
6
8
10
12
14
16
18
20
time(sec)
Figure 5.16: Parameter Estimates, Thresholds and Signatures for Simulated Test Case 1 their signatures. In all three test cases, detection of the parameters escaping their thresholds was within 0.001 seconds. The friction fault isolation and detection scheme is composed of the dynamic lter, the recursive estimator of the friction model parameters and the detection ag. The scheme has been validated here under the ideal conditions of numerical simulation. In the next section, the more important validation, that of an experimental analysis, is given. For reference, a copy of the Simulink model and the source code is given in Appendix B. For implementation in the experimental analysis, the m- les are modi ed only slightly and supplemented with another m- le that relates the signal processor output to the Matlab workspace.
5.7.2 Results for Application to the Precision Positioning Experiment Reported here are seven di�erent test cases that display the success of the method described in the preceding sections when applied to the pneumatic cylinder and mass load experiment. These cases compare di�erent levels of friction fault for a range of voltage input signals. The wide range of inputs is applied to show that the scheme is not restricted to a speci c input
84 Fault sensitive acceleration signal
4
|−−> Coulombic friction fault
3
2
Acceleration (m/sec )
2
1
0
−1
−2
−3
8.5
9
9.5
10
10.5
11
11.5
12
time (sec)
Figure 5.17: Fault Sensitive Acceleration for Simulated Test Case 2 for success in detection and isolation of the friction fault. The seven test cases are all displayed in Table 5.2 and Table 5.3. Speci cally, tests 1 - 3 compare di�erent types of applied friction fault for common inputs. Test cases 3,4 and 3,5 compare di�erent input voltages and frequencies, respectively, for common applied fault types. Test cases 6 investigates a di�erent input type for the common fault types of cases 3 - 5. Lastly, test case 7 investigates the extreme case of two staggered faults, with the second fault exhibiting very high stiction. This case is also subjected to a di�erent input type than the other six cases. In the tables, air supply at the fault and the fault character describe the type of fault applied. Air supply at the fault refers to the to the amount and speed that the air supply to the block is reduced to induce a friction fault. The fault character refers to the size of and amount of sticking or slipping observed in the load acceleration measurements due to the friction fault. Fault occurrence time and detection time refer the time of initiation of the fault and of the parameters exiting their threshold windows, respectively. Parametric performance describes the behavior of the parameters prior to and after the fault. The parameters are \well behaved" when they track to a pre-friction level and to their signature values with little variance.
85
Table 5.2: Dry Friction Fault Detection Test Cases Test Input Air Supply No. Voltage (V) Frequency (Hz) Type at the Fault 1 1.4 8 sine gradually reduced supply 2 1.4 8 sine slightly reduced supply 3 1.5 8 sine cut-o� supply 4 1.2 8 sine cut-o� supply 5 1.5 4 sine cut-o� supply 6 1.0 8 square cut-o� supply 7 1.2 8 triangle reduced and cut-o� for faults 1 and 2, resp.
Table 5.3: Dry Friction Fault Detection Test Cases Test Fault Occurrence Fault Detection Parameter (�1 ; �2 ) No. Time (sec) Character Time (sec) Performance 1 1.0 - 4.5 from high slip to { both well (interval) increasing stick fault behaved 2 3.05 small and 0.015 both very high slip fault well behaved 3 2.9 abrupt fault with 0.035 both very low stick well behaved 4 3.05 abrupt fault with 0.06 �1 behaves, �2 high stick exhibits large variance 5 2.9 abrupt fault with 0.25 both behave high stick very well 6 2.8 abrupt fault with 0.04 both behave pre-fault, high stick post-fault variance 7 2.7, 3.6 small high slip fault 1, 0.1 both behave for fault 1, very high stick fault 2 (fault 1) �2 poor post-fault 2
86 F = theta1*sgn(vel) + theta2*vel for Simulations f
parameters, thresholds and signature values
2
x − theta 1 signature, thresholds o − theta 2 signature, thresholds
1.5
theta 1 1 0.5
theta 2
0 −0.5 −1 −1.5 −2 −2.5 −3 2
4
6
8
10
12
14
16
18
20
time(sec)
Figure 5.18: Parameter Estimates, Thresholds and Signatures for Simulated Test Case 2 In test cases 1 - 3, all conditions are nearly equivalent except in the manner in which the friction fault is applied. The only other variation is that cases 1 and 2 have 1.4 Volts amplitude inputs and case 3 has a 1.5 Volts amplitude input. This variation is assumed negligible. The chief variation is in the application of the fault. In case 1, the fault is gradually applied over an interval of time. Cases 2 and 3 investigate small and large abrupt faults, respectively, which are more likely types of actual faults. For this reason, all of the added faults in the remaining four test cases are also of the abrupt type. A plot of the measured acceleration for test case 1 is shown in Figure 5.21. In this plot, the gradual addition of the friction fault for 1 � t � 4:5 seconds can be seen as the amplitude of the signal decreases. It is also observed that the signal is initially of sinusoidal form, as is the input. The form becomes distorted as the added friction is increased. This is seen more clearly in Figure 5.22, which shows the measured and modeled accelerations for pre- and postfault intervals of time. As the modeled acceleration is generated under no friction conditions, the discrepancy between the modeled and measured accelerations is small prior to the added friction fault. Note that the measured acceleration shows a stiction e�ect in the peaks prior to
87 Fault sensitive acceleration signal |−−> Coulomb and viscous friction fault
4
3
2
Acceleration (m/sec )
2
1
0
−1
−2
−3
8.5
9
9.5
10
10.5
11
11.5
12
12.5
13
time (sec)
Figure 5.19: Fault Sensitive Acceleration for Simulated Test Case 3 the fault occurrence. For di�erent voltage inputs, this e�ect varies and generally decreases for increasing input amplitude and frequency, as will be seen in the other test case results. In any case, the added dry friction fault is distinguished from the pre-fault stiction in the dynamic lter generation, thereby isolating the desired dry friction fault for detection. Although the estimated parameters have no physical meaning except by their signature values, they converge to this pre-fault stiction behavior. A discussion about the system model performance under non friction conditions is given in Appendix C. To see the detection of the dry friction fault, Figure 5.23 shows the evolution of the recursively estimated friction model parameters �1 (t) and �2 (t) for the gradually added fault of this test case. The parameters slowly increase to their signature values, peak before tracking to the signatures and nally exhibit low variance around their signatures until 6 sec. After 6 sec, the parameters divert from their signatures as another reduction in the acceleration signal amplitude is present between 5.8 and 7.5 sec. This reduction is a result of drifting in the mass load while the fault was added. The drifting created added binding between the mass and surface contact area.
88 Ff = theta1*sgn(vel) + theta2*vel for Simulations
parameters, thresholds and signature values
x − theta 1 signature, thresholds o − theta 2 signature, thresholds 2 theta 2
1
theta 1
0
−1
−2
−3 2
4
6
8
10
12
14
16
18
20
time(sec)
Figure 5.20: Parameter Estimates, Thresholds and Signatures for Simulated Test Case 3 The more likely fault types, i.e. abrupt faults, are investigated in the remaining six cases. Now, the results of test cases 2 and 3 are given to compare to test case 1 as all conditions are nearly equivalent. The measured acceleration and estimated parameter evolution plots for test cases 2 and 3 are shown in Figure 5.24,Figure 5.25 and Figure 5.26, Figure 5.27, respectively. The parameter estimate plots show fast tracking to the signature values with low variance for these abrupt fault cases. The value of �1 (t) shows lower variance than �2 (t) in these three cases. The estimated parameters for test case 3 are well behaved and the conditions of this added fault, i.e. the air supply at the fault and the fault character, are common to the next three test cases (4, 5 and 6). Prior to the investigation of these cases, it is useful to see how the parameter estimates are quantitatively related to measured acceleration. As discussed, the friction force is dynamically related to the di�erence between the measured and modeled accelerations, i.e. the acceleration residual, when friction is present. A plot of the acceleration residual for test case 3 is shown in Figure 5.28. As discussed in Section 5.6.2, the lter parameters and the signature values are estimated to t the ltered friction model signal to this acceleration residual after the occurrence of the
89 Measured Acceleration for Vin = 1.4 sin(8Hz*2pi*t) |−−> Gradual Friction Fault
20
15
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
7
8
Figure 5.21: Measured Acceleration for Test Case 1 fault. In Figure 5.29, the t between the ltered friction signal (solid) and the acceleration residual (dashed) show the success of this approach. Thus, in the event of a fault, the estimated parameters track to the parameter values that, with the estimated lter, generate a t such as that exhibited in Figure 5.29. The acceleration and parameter estimation plots for test case 4 are in Figure 5.30 and Figure 5.31. Test cases 3 and 4 show the e�ect of varying the amplitude of the voltage input under the same added dry friction fault condition. The fault for case 3 displays less sticking behavior as the mass has more inertia to push through the sticking e�ect when the direction of motion changes. The high sticking character in the friction fault and resulting greater noise in the post-fault acceleration signal for case 4 resulted in lower post-fault performance for �2 . Still, the pre-fault estimates behave well enough to detect the fault. The acceleration and parameter estimate plots for test case 5 are in Figure 5.32 and
90
2
Acceleration (m/sec )
Pre−Fault Accelerations
Post−Fault Accelerations
20
20
15
15
10
10
5
5
0
0
−5
−5
−10
−10
−15
−15
−20 0.3
0.4
0.5 time (sec)
0.6
0.7
−20 5.3
5.4
5.5 time (sec)
5.6
5.7
Figure 5.22: Measured (dashed) and Modeled (solid) Accelerations, Pre- and Post-Fault for Test Case 1 Figure 5.33. Test cases 3 and 5 show the e�ect of varying the frequency of the voltage input for the same added dry friction fault. Case 3 displays less sticking behavior overall as the pneumatic system is sti�er at a higher frequency, particularly at or near the resonant frequency (8-9 Hz). The high pre-fault stiction character and high sticking character after the friction fault for case 5 still resulted in good performance of the estimates. The threshold bounds accommodate higher variations in �2 prior to the fault and the detection is successful. The plots for cases 6 and 7 are shown in Figure 5.34, Figure 5.35 and Figure 5.36, Figure 5.37, respectively. These two test cases show the a�ect of di�erent voltage input signal forms, with a square wave input for test case 6 and a triangular waveform input for test case 7. Also, case 7 investigates a staggered fault case, where a small fault of high slip character occurs at 2.7 sec and an abrupt cut-o� fault of very high stick character occurs at 3.6 sec. Although there exists a high level of post fault variance in Figure 5.35, attributed to applying an input of
91 F = g*theta1*sgn(vel) + theta2*vel for V = 1.4 sin(8Hz*2pi*t) f
in
7
o − theta2 signature
6
theta2
parameters, thresholds and signature values
x − theta1 signature 5
4
3
theta1
2
1
0
−1
0
1
2
3
4 time(sec)
5
6
7
8
Figure 5.23: Parameter Estimates, Thresholds and Signatures for Test Case 1 higher nonlinear content, the threshold detection step is successful and tracking is still behaved. In test case 7, Figure 5.37 shows successful parametric performance and detection for the slip fault and poor detection performance for the extremely high stick fault. As discussed, the Coulomb and viscous friction model is inadequate to model friction of such high sticking content. This is evident as �1 (t) is seen to track to a negative value and �2 (t) becomes very large after the occurrence of the high stick fault. The extreme test case 7 represents a limiting case of the detection and isolation scheme.
5.8 Conclusions There are multiple factors that contribute to the level of and stick / slip content in the dry Coulombic friction between the air bearing mass and the level surface on which it rides. The
92 Measured Acceleration for Vin = 1.4 sin(8Hz*2pi*t)
20 |−−> Friction Fault 15
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
7
8
Figure 5.24: Measured Acceleration for Test Case 2 supply pressure to the air bearing mass largely controls the level of friction between the bottom of the block and the level surface. For a pressure of 10 psi decreasing down to 1 psi the sliding friction slowly increases and exhibits high slipping / low sticking character. Once the supply pressure is turned o�, the sticking characteristic becomes more present. As a friction control, however, the supply pressure is also coupled to the type, amplitude and frequency of the voltage input signal. For decreasing amplitude and / or frequency of a sinusoidal input, the sticking e�ect increases. For a higher amplitude, the block has more inertia to push through the direction changes. Further, higher frequencies make the cylinder sti�er and hence less sticking is present. The dry friction fault detection scheme is successful and displays good robustness with respect to variable input signals and levels of sticking in the dry friction fault. The fault detection scheme designed here detects changing process conditions in the case
93 F = g*theta1*sgn(vel) + theta2*vel for V = 1.4 sin(8Hz*2pi*t) f
in
4
parameters, thresholds and signature values
3
2 x − theta1 signature
theta1 1
o − theta2 signature
0
−1
theta2
−2
−3
1
2
3
4 time(sec)
5
6
7
Figure 5.25: Parameter Estimates, Thresholds and Signatures for Test Case 2 of wear and excessive side loading, in the form of dry friction, of a precision positioning device. A ow diagram of the implementation of this friction detection scheme is shown in Figure 5.38. The process input d represents noise present in the experimental apparatus, with or without friction. All other parameters and variables are de ned in the previous sections as follows. In Section 5.4 the frequency response measurement from the servo valve voltage input Vin to the mass acceleration x, under no added friction conditions, was given and discussed. Also, the discrete fourth-order transfer function Gb(z ?1) was t to the frequency response data to simulate acceleration x^(t) of the mass without friction for a given servo voltage input. It was shown in Section 5.5.2 that the friction force Ff is dynamically related to the di�erence between the measured and simulated (non friction) accelerations, called the acceleration residual xr (t). In Section 5.6.1 the viscous and coulomb friction model was employed and a prediction error approach [4] was used to model the dynamic relationship between the friction
94 Measured Acceleration for Vin = 1.5 sin(8Hz*2pi*t) |−−> Friction Fault 20
15
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
7
8
Figure 5.26: Measured Acceleration for Test Case 3 force and the acceleration residual, using an output error optimization in Section 5.6.2. A parameterized friction signal xf (t) was incorporated with the normalized lter Ge (q?1 ) in Section 5.6.3 and the procedure was implemented by recursive least-squares (RLS) estimation of the friction model parameters �^(t) in Section 5.6.4. Simple threshold decision logic was applied to these estimates to detect the isolated dry friction fault on-line. By systematically reducing the data contained in the measured input and output signals to the estimation of two friction model parameter signals, the scheme isolates the friction fault from other possible sensor, actuation or process faults that can occur in precision positioning devices. Thus, the goal of detection and isolation of FDI schemes has been achieved. Experimental identi cation of friction and its compensation in precise, position controlled mechanisms was also investigated by Johnson and Lorenz [31]. Their approach was di�erent in that a parameterized model of the friction force was identi ed from the loop errors in
95 F = g*theta1*sgn(vel) + theta2*vel for V = 1.5 sin(8Hz*2pi*t) f
in
6
5
parameters, thresholds and signature values
x − theta1 signature 4
o − theta2 signature theta1
3
2
1
0
−1 theta2 −2
−3
0
1
2
3
4
5
6
7
time(sec)
Figure 5.27: Parameter Estimates, Thresholds and Signatures for Test Case 3 a state feedback motion controller. Signal processing was used to isolate the errors as functions of the states and the physical relationship between friction and the spatial states (e.g. position, velocity) were used to formulate the model structure. The approach was experimentally validated in a robotic gripper application. Their schemes parallels the FDI scheme designed here but lacks the interpretation provided by the estimated friction model parameters that the scheme in Figure 5.38 generates. It would in fact be possible to incorporate the detection scheme into their control algorithm. The scheme would inherently provide the information they require for compensation and at no added cost the detection of changing process conditions, that may have resulted in a fault, would be possible. By design, the addition of friction in the apparatus is equivalent to an increase in the piston dry friction. This fault represents a signi cant problem that exists in industry where precision positioning devices are employed. The scheme detects a change in process conditions
96 Acceleration Residual for Vin = 1.5 sin(8Hz*2pi*t)
20
|−−> Friction Fault
15
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
7
8
Figure 5.28: Acceleration Residual for Test Case 3 due to wear and excessive side loading that result from a friction fault in a precision positioning device. The controls engineer would certainly bene t by applying this simple, reliable method of dry friction fault detection in lieu of or adjointly with any precision compensation. In simulation analyses, the scheme has been proven to be very e�ective and successful. Furthermore, for implementation in an experiment, the only added hardware required is an accelerometer, which is light-weight, inexpensive and easy to add to a positioned load.
97
Acceleration Residual and Filtered Friction Signal for Test Case 3
15
5
2
Acceleration (m/sec )
10
0
−5
−10
−15
4
4.2
4.4
4.6
4.8
5
time (sec)
Figure 5.29: Acceleration Residual (dashed) and Filtered Friction Model Signal (solid) for Test Case 3
98
Measured Acceleration for Vin = 1.2 sin(8Hz*2pi*t)
20 |−−> Friction Fault 15
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
Figure 5.30: Measured Acceleration for Test Case 4
7
8
99
F = g*theta1*sgn(vel) + theta2*vel for V = 1.2 sin(8Hz*2pi*t) f
in
8
parameters, thresholds and signature values
6
x − theta1 signature o − theta2 signature theta1
4
2
0
theta2
−2
−4
−6
0
1
2
3
4 time(sec)
5
6
7
Figure 5.31: Parameter Estimates, Thresholds and Signatures for Test Case 4
8
100
Measured Acceleration for Vin = 1.5 sin(4Hz*2pi*t)
20
15
|−−> Friction Fault
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
Figure 5.32: Measured Acceleration for Test Case 5
7
8
101
Ff = g*theta1*sgn(vel) + theta2*vel for Vin = 1.5 sin(4Hz*2pi*t) 4
x − theta1 signature,threshold
3.5
parameters, thresholds and signature values
o − theta2 signature,threshold
theta1
3
2.5
2
1.5 theta2 1
0.5
0
−0.5
1
2
3
4 time(sec)
5
6
Figure 5.33: Parameter Estimates, Thresholds and Signatures for Test Case 5
7
102
Measured Acceleration for Vin = 1 square(8Hz*2pi*t)
20 |−−> Friction Fault 15
2
Acceleration (m/sec )
10
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
Figure 5.34: Measured Acceleration for Test Case 6
7
8
103
Ff = g*theta1*sgn(vel) + theta2*vel for Vin = 1 square(8Hz*2pi*t) 20 x − theta1 signature,threshold theta1
parameters, thresholds and signature values
15
o − theta2 signature,threshold
10
5
0
−5
−10
theta2
1
2
3
4
5
6
7
time(sec)
Figure 5.35: Parameter Estimates, Thresholds and Signatures for Test Case 6
8
104
Measured Acceleration for Vin = 1.2 tri(8Hz*2pi*t)
20
15 |−−> Friction Fault 1
2
Acceleration (m/sec )
10
|−−> Friction Fault 2
5
0
−5
−10
−15
−20 0
1
2
3
4 time (sec)
5
6
Figure 5.36: Measured Acceleration for Test Case 7
7
8
105
Ff = g*theta1*sgn(vel) + theta2*vel for Vin = 1.2 tri(8Hz*2pi*t) 60
parameters, thresholds and signature values
50 theta2 40 x − theta1 signature o − theta2 signature
30
20
10
0
−10 theta1 −20
1
2
3
4
5
6
7
time(sec)
Figure 5.37: Parameter Estimates, Thresholds and Signatures for Test Case 7
8
106
Figure 5.38: Flow Diagram of Scheme for Fault Detection and Isolation of Dry Friction in a Precision Positioning Device.
Chapter 6
Conclusions The success of the quasilinearization method in parametrically identifying unknown parameters o�-line that accompany linear and nonlinear terms and pre-exist or result from damage in the model of the space antenna structure is extensively proven for a wide range of loading, nonlinearity level, integration routine conditions and noise levels in the observed dynamic responses. Bellman [8] has also shown success of the method in cases where only partial information in the dynamic response is observed. The success of the method can also be improved in cases where weighting the cost function information is appropriate. For example, when a section of the measured data contains better information for identi cation, i.e. if initial condition mismatching exists and noise or damage contaminated the observed signals at a certain point in time, a Jacobi approximation weighting is used. Further, if the initial or nal data in the measurements are more reliable for identi cation, exponential (Laguerre approximation) weighting is appropriate. Although the method is highly successful for the eighth-order space antenna model investigated, the number of parameters was kept small since the number of di�erential and linear equations that require solutions for each iteration grows rapidly for a higher number of unknown parameters. In the modi ed Kabe model considered here, consider the extreme case that all of the masses are unknown and possibly di�erent, each spring element is nonlinearized, to account for possible damage, by adding cubic dependence and all of the sti�ness values are unknown and not necessarily equal. Each iteration would require the solution of 784 di�erential equations and the inversion of a 48 by 48 matrix. The observation measurements in this case must contain at least 48 samples for the problem to be determined and many more samples than that for any hope of successful convergence. The likelihood of a sign error in the enormous equation formulation and possible ill-conditioning of the matrix pose threats to the success of the method, which would also require large computational time.
107
108 As a tool for identifying a limited number of unknown parameters in damaged and therefore nonlinear higher order structural systems, given the model structure and post damage dynamic response observations, the quasilinearization approach of parameter estimation is reliable. The approach also shows promise in the detection, location and assessment of multiple structural faults in such a model. Successful fault detection and isolation of a dry friction fault in a pneumatically actuated air bearing mass has also been achieved. The FDI scheme systematically reduces the data contained in the measured servo voltage input and measured mass load acceleration output signals. The reduction results in the estimation of two friction model parameter signals and the scheme isolates the friction fault from other possible sensor, actuation or process faults that can occur in precision positioning devices. Thus, the goal of detection and isolation of FDI schemes has been achieved. Moreover, in generating an FDI scheme for friction fault detection in precision positioning devices, a more general dry friction FDI scheme has emerged and appears to be implementable in other dynamic systems, as in the (admittedly simple) second order system in the numerical analysis. By design, the addition of friction in the experimental apparatus is equivalent to an increase in the piston dry friction. This fault represents a signi cant problem that exists in industry where pneumatic positioners are employed. It therefore serves to design a simple and e�ective fault detection and isolation scheme. The controls engineer would certainly bene t by applying this simple, reliable method of dry friction fault detection prior to or in lieu of any precision compensation. The only added hardware required is an accelerometer, which is lightweight, inexpensive and easy to add to the positioned load. Since this technique of identi cation and detection is successful for this highly nonlinear system and for a wide class of input signals, it is likely to bene t the engineer interested in identifying a dry friction fault in a lower order nonlinear electro-mechanical system.
Appendix A
Selection of Nonlinear Structural Spring by Modal Participation This appendix describes the method by which k1 at m6 in the Kabe model was selected as the structural spring that became nonlinear as a result of damage. It is assumed that the quasilinearization technique is more successful when the constants being estimated accompany terms that participate more in the equations of motion and the linearized equations that the method generates. Intuitively, the parameters must be observable in the dynamic response in order to estimate them. Moreover, in selecting which sti�ness coe�cients to estimate and which structural spring to nonlinearize, it is necessary to rank the sti�ness coe�cients by their amount of observability. This ranking is done quantitatively by computing the participation of the six di�erent sti�ness values in terms of their mass normalized strain energies, U . The justi cation for this is that the greater the mass normalized strain energy for the greatest number of modes, the more that particular spring participates in the equations of motion under general loading. The mass normalized strain energy of spring kj in mode �i is computed as
U = 21 f�^i gT [ K ]j f�^i g;
(A.1)
f�^ig = p1M f�i g
(A.2)
where each mass normalized mode �^i is
i
where Mi is the modal mass of �i . The matrix [ K ]j represents the sti�ness matrix modi ed by setting all spring constants to zero except kj . For each spring, these energies and their percentage contribution to the total strain energy of each mode are calculated. Figure A.1 reveals that spring k1 participates the most in the greatest number of modes, i.e. greater than 20 percent in six
109
110
Figure A.1: Percentage of strain energy per spring per mode modes and 90 percent in two modes. Further, this percentage is calculated for each of the four masses that k1 grounds. Figure A.2 shows that k1 at m6 participates the most in the greatest number of modes (note the symmetry between m3 and m6 ). Therefore, to nonlinearize the
Figure A.2: Modal percentage of strain energy in k1 at m2 ; m3 ; m6 and m7
111 equations of motion, k1 of m6 is given linear and cubic dependence on position (see Equation 4.4) to simulate damage in that structural spring.
Appendix B
Friction FDI Scheme Source Code and Numerical Analysis Model The Simulink model is shown in Figure B.1 and the source code follows. For the experimental analysis, the same code was used, modi ed slightly, with the addition of the code for relating the signal processor to the Matlab workspace.
112
113
accm To Workspace4 UNDAMAGED
1
1
s Integrator2
s Integrator3
Acceleration Residual
−co Scope
Gain5 −k Gain
acc_res
Sine Wave
To Workspace
DAMAGED 1
1
s Integrator
s Integrator1
accf
−co
To Workspace3
Gain4
Friction Force
Uniform Random Number1
−c Gain2
Switch
0
Clock
vel
Constant
To Workspace2 −a Scope1
Gain3
Ff Switch1
Coulomb & Viscous Friction Uniform Random Number
Clock1 0
To Workspace1
Constant1 −k
Signals were observed and the Noise is +/− 2% the peak value of the signal after settling
Gain1
Figure B.1: Second Order Models for the Numerical Simulation of the FDI Scheme
114
% Given below are the three m-files used in Matlab to implement % the dry friction FDI scheme.
% This file contains the model and fault data and runs the % simulink models.
% Input properties Fo = 3.0; wo = 4*2*pi; % in rad/sec
% Model properties k = 1.; co = 2.2;
% Fault Properties c = 1.; %viscous a = 1.; %Coulomb
% Simulation Properties delt = 0.005; tend = 20;
% Fault additions and exclusions switch1 = tend/2.; % Adds viscous friction %switch1 = tend; % Turns off viscous friction switch2 = tend/2.; % Adds Coulombic friction %switch2 = tend; % Turns off Coulombic friction
% run the simulink model options = simset('FixedStep',delt); sim('damage',tend,options);
time = tout; figure,subplot(1,2,1)
115 plot(time,accf,'-',time,accm),title('Pre-Fault Accelerations') xlabel('time (sec)'), ylabel('Acceleration (m/sec^2)') subplot(1,2,2) plot(time,accf,'-',time,accm),title('Post-Fault Accelerations') xlabel('time (sec)')
figure,plot(time,acc_res,'-') xlabel('time (sec)'), ylabel('Acceleration (m/sec^2)') title('Simulated Acceleration Residual')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% This file creates the filter for the Clmb/Visc friction to acc_res signals. % The model fitting is done in the time domain. % Gamma is varied to find a best fit model (norm of difference criterion).
% friction modelled as Coulomb and Viscous (positive to the right) I = 1; nmag(I) = 30.; nmg = 30.;
for gam = 1:0.5:2 % whatever a/c is in this case sFf = -(sign(vel) + gam*vel); %positive to the right
% compute filter based on added friction data sZ = [acc_res(2500:3000) sFf(2500:3000)];
% design the system sTH = oe(sZ,[3 2 0],1e8,256\1); %TH=arx(Z,[3 4 0],1e8,256\1);
%simulate the system sysim = idsim(sZ(:,2),sTH);
116 %check the norm of the difference (time domain) nmag(I+1) = norm(sysim(50:500)-sZ(50:500,1));
if lt(nmag(I+1),nmg) nmg = nmag(I+1); gamma = gam Ff = sFf; Z = sZ; TH = sTH; ysim = sysim; end I = I+1;
[a,b,c,d,k]=th2ss(sTH); dcg(I) = ddcgain(a,b,c,d)
end figure,plot(time,acc_res,'k --') axis([0 tend -23 23]) grid on title('Acceleration Residual for V_i_n = ?') %1.5 sin(8Hz*2pi*t)') xlabel('time (sec)') ylabel('Acceleration (m/sec^2)') zoom on
tm = time(2500:3000); figure plot(tm,ysim,tm,Z(:,1),'k --'),figure(gcf),zoom on grid on title('Acceleration Residual and Filtered Friction Signal for Simulation') xlabel('time (sec)') ylabel('Acceleration (m/sec^2)') zoom on
figure,plot([ysim Z(:,1)]),figure(gcf),zoom on
117 figure,plot([ysim-Z(:,1)]),figure(gcf),zoom on
[a,b,c,d,k]=th2ss(TH); save Ff_filter3a gamma a b c d dcg delt
% This plot characterizes the filter in the frequency domain syse=ss(a,b,c,d,delt); figure,bode(syse),figure(gcf),zoom on
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% This file runs the whole schebang at once. Parameters l and c are the data % batch length and interval, respectively. damage1
%load Ff_filter1 % Filter for Viscous Friction Fault %load Ff_filter2a % Filter for Coulomb Friction Fault load Ff_filter3 % Filter for Coulomb and Viscous Friction Fault
file1 = -sign(vel); file2 = -vel;
%positive to the right sign convention
% run the simulink model using voltage input options = simset('FixedStep',delt); % sample time for model sim('fricfilt',tend,options);
[s,ss] = size(time);
% Exclude initial condition and signal truncation mismatching Z = [xone(100:s-200) xtwo(100:s-200) acc_res(100:s-200)]; %s = vector length l = 300; c = 20; fprintf(' the data batch length l and interval c are ') l,c par = testrarx(Z,l,c)';
118
% time vector for parameters tm = time(100+l:c:s-200);
% calculate the threshold values mp = [mean(par(1:50,1)) mean(par(1:50,2))]; sdp = [std(par(1:50,1)) std(par(1:50,2))]; ths = [mp+3*sdp;mp-3*sdp]; threshs = ones(size(tm))*[ths(1) ths(2) ths(3) ths(4)];
% generate the signature value vectors sigtrs = ones(size(tm))*[1.0 gamma];
% plot the result figure,plot(tm,par(:,1),tm,par(:,2),tm,threshs,'-.',tm,sigtrs) hold on,plot(tm(1:30:171),sigtrs(1:30:171,1),'x') plot(tm(15:30:171),sigtrs(15:30:171,2),'o') plot(tm(1:30:171),threshs(1:30:171,1:2),'x') plot(tm(15:30:171),threshs(15:30:171,3:4),'o')
title('F_f = g*theta1*sgn(vel) + theta2*vel for Simulations') ylabel('parameters, thresholds and signature values') xlabel('time(sec)') grid on zoom on
Appendix C
Linear Transfer Function Model Performance in the Precision Positioning Apparatus The purpose of this appendix is to discuss the results of using a linear transfer function to model the highly nonlinear pneumatic cylinder and air bearing mass load dynamics from voltage input to acceleration output. As discussed in Section 5.7, not all of the system dynamics, e.g. pre-fault stiction in the piston, are captured by this linear model. Moreover, as linear models are only good at or near the operating point for which they were generated, the inability of the model to capture all of the system dynamics becomes accentuated when friction is added. This is exactly what it is supposed to do; the resulting acceleration residual provides sensitivity to a disruption to the systems operating dynamics. The dynamic lter generated in Section 5.6 is what isolates the fault of interest within this disruption, namely a dry friction fault. Furthermore, the model is simple to identify and good enough for the purposes of fault detection and isolation of dry friction in a precision positioning device. As an aside, the load position measurements in this precision positioning apparatus contain less noise than the measured load accelerations and the modeled position more accurately matches these measurements, as seen in Figure C.1.
119
120
Displacement Signals for V = 1.0 sin(7.2Hz*2pi*t) in
Modeled (solid) 2
Measured (dashed)
1.5
Displacement (m)
1
0.5
0
−0.5
−1
−1.5
−2 10
10.1
10.2
10.3
10.4
10.5 time (sec)
10.6
10.7
10.8
10.9
Figure C.1: Plot of Modeled (solid) and Measured (dashed) Mass Position Signals for a Given Input
Bibliography [1] L. Papadopoulos and E. Garcia. Structural damage identi cation: A probabilistic approach. AIAA, 36(11):2137{2145, 1998. [2] R. Patton, P. Frank, and R. Clark. Fault Diagnosis in Dynamic Systems { Theory and Application. Prentice Hall, New York, 1989. [3] E. Y. Chow and A. S. Willsky. Analytical redundancy and the design of robust failure detection systems. IEEE Trans. Auto. Contr., 29(7):603{614, 1984. [4] L. Ljung. System Identi cation: Theory for the User. Prentice Hall, New York, 1987. [5] T. Soderstrom and P. Stoica. System Identi cation. Prentice Hall, New York, 1989. [6] A. Nayfeh. Parametric identi cation of nonlinear dynamics systems. Computers and Structures, 20(1{3):487{493, 1985. [7] L. Dinca and T. Aldemir. Parameter estimation toward fault diagnosis in nonlinear systems using a markov model of system dynamics. Nuclear Science and Engineering, 127:199{219, 1997. [8] R. E. Bellman and R. Roth. quasilinearization and the Identi cation Problem. World Scienti c Publishing Company, Inc., Singapore, 1983. [9] N. Distefano and A. Rath. System identi cation in nonlinear structural seismic dynamics. Computer Meth. App. Mech. Eng., 5:353{372, 1975. [10] A. K. Kabe. Sti�ness matrix adjustments using modal data. AIAA Journal, Vol. 23, No. 9, pages 1431{1436, 1985. [11] J. M. Ricles and J. B. Kosmatka. Damage detection in elastic structures using vibratory residual forces and weighted sensitivity. Proc. Amer. Contr. Conf., June:2628{2632, 1994. [12] H. G. Natke and J. T. P. Yao. System identi cation approach in structural damage evaluation. ASCE Struc. Eng. Congr., 1, (various pagings), 1986. [13] S. V. Hanagud, M. Meyyappa, and J. I. Craig. Method of multiple scales and identi cation of nonlinear structural dynamic systems. AIAA, 23(5):802{807, 1985. [14] H. Imai, C-B. Yun, O. Maruyama, and M. Shinozuka. Fundamental of system identi cation in structural dynamics. Nat. Ctr. Erthq. Eng. Rsr., 1, (various pagings), 1989. [15] C. Zell and A. Medvedev. Robust detection and isolation of mechanical faults in processes driven by induction machines. Proc. Amer. Contr. Conf., June:3307{3311, 1998.
121
122 [16] D. Yu, D. N. Shields, and J. L. Mahtani. A nonlinear fault detection method for a hydraulic system. Proc. IEEE Inter. Conf. Conr., 2(389):1318{1322, 1994. [17] T. Ho ing and R. Deibert. Estimation of parity equations in nonlinear systems. Proc. IEEE Inter. Conf. Conr. Appl., 2:1121{1126, 1994. [18] S. Nowakowski, M. Boutayeb, and M. Darouach. A new failure detection and correction method for nonlinear systems. Proc. Int. Conf. Sys. Man and Cyber., October:424{428, 1993. [19] E. Gomez and H. Unebehauen. An on{line fault detection scheme for systems with known nonlinear state{space models. Proc. Amer. Contr. Conf., June:2628{2632, 1994. [20] R. Seliger and P. M. Frank. Fault-diagnosis by disturbance decoupled nonlinear observers. IEEE Conf. Dec. Conr., 3:2248{2253, 1991. [21] R. Sreedhar, B. Fernandez, and G. Y. Masada. Estimation of parity equations in nonlinear systems. Proc. Second IEEE Conf. Conr. Appl., 2:715{721, 1993. [22] F. Caccavale and I. D. Walker. Observer-based fault detection for robot manipulators. IEEE Inter. Conf. on Robotics and Automation, pages 2881{2887, 1997. [23] O. A. Johnson. Fluid Power { Pneumatics. American Technical Society, Chicago, 1975. [24] C. R. Burrows and C. R. Webb. Further study of a low{pressure on{o� pneumatic servomechanism. Proc. Instn. Mech. Engrs, 184(45):849{857, 1969{70. [25] J.-Y. Lai, C.-H. Menq, and R. Singh. Accurate position control of a pnematic actuator. Trans. ASME, 112(December):734{739, 1990. [26] T. Nritsugu and M. Takaiwa. Robust positioning control of pneumatic servo system with pressure control loop. IEEE Inter. Conf. on Robotics and Automation, pages 2613{2618, 1995. [27] J.A. Marchant, M. J. Street, P. Gurney, and J. A. Benson. Design and testing of a servo controller for pneumatic cylinders. Proc. Instn. Mech. Engrs, 203:21{27, 1989. [28] S. R. Pandian, Y. Hayakawa, Y. Kanazawa, Y. Kamoyama, and S. Kawamura. Practical design of a sliding mode controller for pneumatic actuators. Trans. ASME, 119(December):666{ 674, 1997. [29] P. E. Dupont and E. P. Dunlap. Friction modeling and proportional-derivative compensation at very low velocities. Trans. ASME, 117(3):8{14, 1995. [30] C. Hatipoglu and U. Ozguner. Robust control of systems involving non-smooth nonlinearities using modi ed sliding manifolds. Proc. Amer. Contr. Conf., June:2133{2137, 1998. [31] C. T. Johnson and R. D. Lorenz. Experimental identi cation of friction and its compensation in precise, position controlled mechanisms. IEEE Trans. Indus. Appl., 28(6):1392{1398, 1992. [32] B. Armstrong-Helouvry, P. Dupont, and C. C. De Wit. A survey of models, analysis tools and compensation for the control of machines with friction. Automatica, 30(7):1083{1138, 1994. [33] Y. F. Lim and K. Chen. Dynamics of dry friction: A numerical investigation. Physical Review E, 58(5):5637{5642, 1998.
123 [34] P. A. Bliman and M. Sorine. Easy{to{use realistic dry friction models for automatic control. Proc. Eruo. Contr. Conf., September(3):3788{3794, 1995. [35] P. E. Dupont. Avoiding stick{slip through pd control. IEEE Trans. Auto. Contr., 39(5):1094{1097, 1994. [36] Y. S. Kang and K. J. Kim. Friction identi cation in a sight stabilisation system at low velocities. Mechanical Systems and Signal Processing, 11(3):491{505, 1997. [37] D. A. Haessig Jr. and B. Friedland. On the modeling and simulation of friction. Trans. ASME, 113(9):354{362, 1991. [38] D. Karnopp. Computer simulation of stick{slip friction in mechanical dynamic systems. Trans. ASME, 107(3):100{103, 1985. [39] A. A. Batista and J. M. Carlson. Bifurcations from steady sliding to stick slip in boundary lubrication. Physical Review E, 57(5):4986{4996, 1998. [40] R. E. Bellman and R. E. Kalaba. Modern Analytic and Computational Methods in Science and Mathematics. American Elsevier Publishing Company, Inc., New York, USA, 1965. [41] D. A. Haessig Jr. and B. Friedland. On the modeling and simulation of friction. Proc. Amer. Contr. Conf., 2:1256{1261, 1990. [42] MATLAB Application Program interface guide. Natick, MA, 1998. ver. 5. [43] S. Drakunov, G. D. Hanchin, W. C. Su, and U. Ozguner. Nonlinear control of a rodless pneumatic servoactuator, or sliding modes versus coulomb friction. Automatica, 33(7):1401{ 1408, 1997. [44] J. F. Blackburn, G. Reethof, and J. L. Shearer. Fluid Power Control. The M.I.T. Press, Cambridge, 1960. [45] R. B. Goodman. A Primer on Pneumatic Valves and Controls. Krieger Publishing Company, Malabar, FL, 1997. [46] J. L. Shearer, B. T. Kulakowski, and J. F. Gardner. Dynamic Modeling and Control of Engineering Systems. Second Edition. Prentice Hall, New Jersey, 1997. [47] Macro Sensors division of Howard A. Schaevitz Technologies, Inc. Model DC 750{1000. [48] DSP Technology Inc. SigLab Signal Processing Software. Fremont, CA. Ver. 3.0. [49] R. A. de Callafon, D. Roover, and P. M. J. Van de Hof. Multivariable least squares frequency domain identi cation using polynomial matrix fraction descriptions. IEEE Conf. Dec. Conr., June:2030{2035, 1996. [50] R. A. de Callafon and P. M. J. Van de Hof. Freqid { frequency domain identi cation toolbox for use with matlab. Sel. Top. Iden. Modl. Conr., 9:129{134, 1996.