Design consideration and verification by experiment of rotary frequency converter Yasutoshi Takemoto*, Goro Fujita*, Ryuich Yokoyama** Kaoru Koyanagi***, Toshihisa Funabashi****, Chen Wenguang*****
Abstract
– Wind power generation using an unlimited, natural energy is getting an attention regarding environment issues in recen t years, and the installed capacity of wind power generation system is increasing at a rapid pace, Resulting in deteriorati on of power quality especially frequency and voltage. This fact will be a big problem to restrict large capacity of wind f arm. This paper proposes a new frequency converter: rotary frequency converter (RFC) to moderate the electric output f rom wind generation, which is to be installed between a set of wind generators and a grid, providing a smoothed electric output, promoting the wind power generation introduction. This mainly consists of a synchronous machine and the adj ustablespeed machine. Independent controls of input/output voltage, active power, and reactive power offer electrical se paration between the two networks. Experimental study of prototype model and its characteristics, especially dynamic c ontrol is discussed in this paper.
Keywords: final manuscript, guidelines, instructions, prospective authors, template. 1. Introduction
2. RFC (Rotary Frequency Converter)
Reduction of finite fossil fuels consumption and mitigatin g carbon dioxide gas emission causing global warm are ine vitable for construction of continuous society. In recent year s, many researches such as renewable resources on photovo ltaic or wind power, effective utilization of exhausted heat, are carried out. Japan is proposing that domestic target capa city of photovoltaic generation is 4820MW, and wind powe r is 3000MW. However, these are natural energy so the vari ation directly results in the generated output. Therefore, if t he installed capacity increases, it will affect frequency and voltage of the power network, degrading power quality. Thi s paper proposes a new stabilization method of the output th at restricts volume installation of wind generation system, r ealizing increase of wind generation.
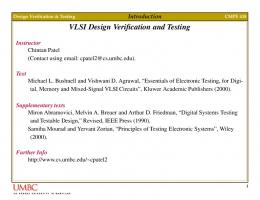
Fig. 1 illustrates the proposed network diagram connecting WF (wind farm), RFC (Rotary Frequency Converter), and a grid. RFC is inserted as a buffer to modulate power interchange between WF and a grid. The WF consists of many generators. The generated power is absorbed and converted to mechanical power by a synchronous machine. RFC mainly consists of the synchronous machine and DFM. The mechanical power is directly conducted by the shaft and revolves the rotor of DFM, in which the secondary winding is exited by threephase excitation control, enables steady output of RFC. The active power output and reactive power output also can be controlled independently. The excitation power is supplied by a cycloconverter or GTO (Gate Turn-off thyristor Inverter). The control signal for the three-phase excitation control is generated by measurement and control software package LabVIEW in this study, measuring the generated power, voltage, current, and rotor speed. Then appropriate control signal for stable output is calculated and sent to the cycloconverter or GTO. The prototype machine developed in this study is 200W capacity and 4-pole, conversed from s retail induction machine of Toshiba. In order to realize secondary winding excitation, the rotor circuit is reproduced. The width of the stator is increased in order to allow enough space for excitation slip rings. Though RFC includes a synchronous machine to be connected to DFM, it is replaced as an induction machine for the initial survey of DFM. A set of an inverter and an induction motor is used as a dum my grid.
z
Yasutoshi. Takemoto and G. Fujita are with Shibaura Institute of Technology, 3-7-5 Toyosu, Koto-ku, Tokyo,135-8548,JAPAN(
[email protected]). ** R. Yokoyama is with Tokyo Metropolitan University, Tokyo Japan as a professor of Electrical Engineering. Tokyo Metropolitan Univiversity, 1-1 Minamiosawa, Hachioji-shi, Tokyo 197-0397, JAPAN (e-mail:
[email protected]). *** K. Koyanagi is currently with TEPCO Systems Corporation. Tepco Systems Corporations 2-37-38 Eitai, Koto-ku, Tokyo 135-0034, JAPAN (e-mail:
[email protected]). **** T. Funabashi is currently with Meidensha Corporation. Meidensha Corporations 36-2 Nihonbashihakozakicho, Cyuo-ku, Tokyo 103-8515, JAPAN (e-mail:
[email protected]).
・
Ia
AC
Stator Rotor p=10 SM
I
AC
RFC (100MVA)
Stator 360rpm Rotor p=10 ±10%
ω
R X
f
a
R
・
f
Ef
a
・
・
Ea
f
Va P Q Va I a
DFM
X Lf f
DC Excitation AVR
AC Excitation ±5Ηz (±10%) CC or GTO INV Frequency
Speed
LabVIEW
Transfer Power Ref.
WF (100MW)
Grid
RFC station (100MW)
機 次側 機 primar 次側 three-phase DFM primary and DFM AC amplifier secondary sides y side output Fig.3 Experiment equipment equivalent circuit. .
Ea
WF : wind farm, RFC : rotary frequency converter, SM : synchronous machine, DFM : double-fed machine, CC: cycloconverter, GTO : gate turn-off thyristor Inverter,
Fig. 1
ϕ Q
In order to construct the proposed scheme, a miniature model is assembled and the experimental study is carried out. Fig. 2 is the control concept and its equivalent circuit is shown in Fig.3. The control signal to secondary excitation of DFM is given by the following. Fig.4 is vector diagram of nominal (steady) operation. From this point, active power (P) (Fig.5), reactive power (Q) (Fig. 6), and voltage (V) (Fig.7) are to be controlled independently. Among several variables, secondary excitation voltage or Ef, excitation current If, excitation frequency ωf are directly controllable. In the active power control, calculate
δ0 δ
decreasing δ
.
Ra Ia
P S
.
Ia
Fig.4
Nominal operation vector diagram. .
Ea .
Ea '
.
j Xa Ia
δ δ0
・
Va
ϕ ϕ' P
from the
desired value, then increase δ so that it corresponds 0 , in the same way, Ea is revised as Ea’ . Then the active power control is realized. In the reactive power control, desired Q’ is given by
Va
δ0
Proposed Rotary Frequency Converter
2.1 Controller design
.
j Xa Ia
.
Lab VIEW : (measurement and control software package)
.
j Xa I'a
.
Ra Ia
S
Q
.
S
'
Q '
. '
Ia
Ra Ia
・
δ0
'
Ia Fig.5 Active power control vector diagram.
to and Ea to Ea’. In voltage control, maintaining the active power, reactive power, and power factor, reducing the primary current Ia to Ia’ increases the voltage. This control scheme is incorporated in this experiment.
.
・
Ea '
j Xa I 'a .
Ea Primary Ou
.
j Xa Ia ・
Measured V
Measured P
Secondary O utput
Measured F
DFM
tput
ϕ' Q
S
Va
δ δ0 ϕ
P
'
S
P ・
' .
Ra I a
V, P, Q Controller .
Ia
Fig.2 Control outline diagram
Fig.6
Ra I'a
・
'
Ia
Reactive power control vector diagram.
.
Ea .
j Xa I a
.
Ea '
・
j Xa I'a
δ δ0 ϕ
.
.
Va
Va '
P
・
・
.
'
Ia
Q
S
Ra I'a
Ra Ia
.
Ia
Fig.7
Voltage control vector diagram.
3. Experiment of RFC 3.1 Basic characteristic Figs. 8 and 9 are fundamental characterizes of the prototype model.Maximum continuous capacity of excitation current is estimated about 1.0 [A] due to diameter of the winding (0.55mm). From Fig.8, with up to 1.5 times of the excitation current, which may be instantaneous maximum capacity, saturation is not identified. The synchronous impedance is about 150 [Ω] as shown in Fig.9, this equals to 6 [puΩ] based on a base impedance as 12.5 [Ω] assuming the base values as 50 [V] and 200[W]. Figure 10 is the first side output voltage wave form of DFM. Figure 11 is FFT result of the first side output voltage wave form of DFM. It can be said that there is a distortion in the output wave form from figure 10. Moreover, it can be said that there is the third high note wave in the first side output according to the FFT analytical result. short-circuit current 1.00
90
0.90
80
0.80
70
0.70
60
0.60
50
0.50
40
0.40
30
0.30
20
0.20
10
0.10
0
0.00
primary output voltage Vo[V]
100
0.00
0.20
0.40
0.60
Output wave form of DFM
0.80
1.00
1.20
1.40
short-circuit current Is[A]
primay output voltage
Fig.10
Fig.11 FFT analysis of output wave form of DFM
1.60
exciting current If[A]
No-load saturation curve・short circuit curve
Fig. 8 No-load saturation curve and short circuit curve. synchronous impedance 180
synchronous impedance Zs[Ω]
160 140 120 100 80 60 40 20 0 0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
exciting current If[A]
Synchronous impedance curve
Fig. 9 Synchronous impedance.
3.2 Equipment specification of control system Figure 12 is figure where the first side voltage, the second side voltage, and the ratio were shown. The X axis of figure is the second side voltage. And the f irst Y axis of figure is a power generation volt age. The second Y axis of figure is a ratio of t he first side voltage and the second side voltag e. The first side is a power generation voltage of DF M. And the second side is an excitation voltage to DF M. The range of the voltage into which the curve of t he ratio doesn't change is 6 to 8[V]. This ratio should be a constant range to control the first side voltage. Th erefore, the output voltage on the first side of this DF M is from 50 to 95[V].
Fig.14
Excitation characteristic of DFM
3.4.2 Result of voltage control experiment Fig.12
Excitation characteristic of DFM
3.3 Experiment of voltage control 3.3.1 Outline of voltage control experiment Figure 13 is figure of the voltage control experiment ion this time. IM and IMV is simple grid at the right of figure. The output to grid is the first side of DFM. The first purpose of the armature voltage control is to stabilize the first side voltage. In this text, PID control is done for the voltage stabilization. In this text, the measurement of the time constant and the armature voltage control of DFM were done. IM
In the experiment, the voltage of the target was se t to 30V. Figure 15 is a change in the voltage. From e xperimental result for KP=0.10 and integral gain KI=0. 01, response characteristics for lower and higher. How ever, the voltage reaches at the reference voltage wi thin 5 seconds, which is desirable value.
INV
DFM
IM
Power AMP RMS Three- Phase -
Kp 1 7 .5
+
+ +
+
Vre
1 KI S
SK
Fig.13
V control experiment outline.
3.4 Experiment result 3.4.1 Time constant measurement Figure 14 is an experiment chart of the time consta nt measurement. DFM is started first. When driving DF M becomes stationary state, the second excitation is do ne. At this time, the voltage of the target of the side o utput is set from the first basic characteristic. The chan ge in the first side output voltage is output from PC with the time axis. The time constant of the control sy stem was measured from the output result. The result, t he time constant of DFM is 0.4 [S]. The measurement result has some changes. Therefore, it measured it ten times. This experiment result is ten time mean va lue of the measurement.
Fig.15
V control experiment outline.
Table. 2 Experiment result measured voltage (without control)
(KP=0.10, KI=0.01)
Target voltage
measured voltage (with control)
39.4[V]
30[V]
29.4 -- 30.0[V]
10.2[V]
30[V]
29.8 -- 30.4[V]
4. Conclusion This paper shows fundamental study of doubly-fed machin e which will be used for RFC. Voltage control on experimen tal equipment is discussed and appropriate gains are obtained. Further studies on active and reactive power controls are be ing conducted. In future, total experimental set of RFC will be predicted in order to discuss the stability improvement c aused by wind power fluctuation, including effect for grid’s s tability. Total control method of the synchronous machine an d DFM will be also involved. It is necessary to improve the control speed. It was clarified to control electrically. It will b e necessary to devise the method of starting RFC in the futu re. Moreover, it is thought that it will verify the influence th at a wavy distortion gives to the control system.
References [1]
[2]
[3]
[4]
[5]
[6]
T. Kuwabara, A. Shibuya, H. Furuta, E. Kita & K. Mitsuhashi, ", Design and Dynamic Response Characteristics of 400 MW Adjustable Speed Pumped Storage Unit for Ohkawachi Power Station, IEEE Transactions on Energy Conversion, 11(2), 1996, pp. 376 - 384 T. Komatsu, M. Fujimitsu, K. Koyanagi, T. Funabashi, G. Fujita, R. Furukawa, R. Yokoyama, ‘A Study on a New Rotary Frequency Converter for Wind Farm Power System’, The International Conference on Electrical Engineering 2001 (ICEE2001) (2001) G. Fujita, K. Ezaki, T. Nakano, R. Yokoyama, K. Koyanagi, T. Funabashi, ‘Frequency Control by Rotary Frequency Converter for Wind Farm in Interconnected Power System’, ICEE 2002 JEJU, (2002) G. Fujita, K. Ezaki, T. Nakano, R. Yokoyama, K. Koyanagi, T. Funabashi, ‘Dynamic Characteristic of Frequency Control by Rotary Frequency Converter to Link Wind Farm and Power System’, IEEE Bologna Power Tech 2003 (BPT2003) (2003) M. Kajihara, G. Fujita, K. Ezaki, R. Yokoyama, K. Koyanagi, T. Funabashi, 'Power System Quality Improving using Doubly-fed Rotary Frequency Converter , IASTED / PowerCon 2003(2003) A. Nakamura, G. Fujita, R. Yokoyama, K. Koyanagi, T. Funabashi, “Power System Stability Improvement Using Doubly-Fed Rotary Frequency Converter”, ICEE 2004 Sapporo (2004)
Biographies Yasutoshi Takemoto was born in Tokyo, Japan, on June 11, 1981. He received B.S. degree f r o m Shibaura Institute of Technology, Tokyo, Japan in 2005. At present he is studying as a M.C. student at the I nstitute. His research interest is disp e r s e d p o w e r c o n t r o l r. He is a student member of the IEE of Japan
Goro Fujita ( M ’ 1 9 9 7 ) was born in January 1970. He receive d the B.E., M.E. and Ph.D degrees in electrical engineering from Hosei Un iversity, Tokyo, Japan in 1992, 1994 and 1997 respectively. In 1997, He was a research student of Tokyo Metr opolitan University. Since 1998, He i s in Shibaura Institute of Technology, Tokyo, Japan as a lecturer. His inter est is in power system control includi ng AGC and FACTS. He is a member of the Society of Instrument and Co ntrol Engineers (SICE) of Japan, the IEE of Japan, and IEEE. Ryuichi Yokoyama has received the degrees of B.S., M.S., and Ph.D. in electrical engineering from Waseda University, Tokyo, Japan, in 1968, 1970, and 1973 respectively. Since 1978 he has been working for the Faculty of Engineering of Tokyo Metropolitan University, and is currently a professor of Electrical Engineering Department. His field of interests includes control and optimization of large-scale systems and application of artificial intelligence to power systems. He is a member of the Society of Instrument and Control Engineers (SICE) of Japan, the IEE of Japan, CIGRE, and IEEE.
Kaoru Koyanagi has received B.S degree in applied physics from Tokyo University of Education in 1971. He obtained Ph.D. degree in electrical engineering from Tokyo Metropolitan University in 2000. From 1971 to 1996, he was with Toshiba Corp. working on power system analytical engineering. He has been involved in various aspects of power system stability analysis and design of control systems. He is currently with TEPCO Systems Corporation and involved with software development in power system engineering. He is a member of IEE of Japan, IEE and IEEE. Toshihisa Funabashi (M’1990, SM’ 1996) was born in Aichi, Japan. He received B.S degree from Nagoya University, Aichi, Japan in 1975 and Ph.D. degree from Doshisha University, Kyoto, Japan in 2000. He joined Meidensha Corporation in 1975 and has engaged in research on power system analysis. Currently, he is Senior Engineer of the Power Systems Engineering Division. He is a senior member of IEEE, a member of IEE and IEE Japan.
Chen Wenguang He was born in December 1968. He as an associate Professor of Nanhua University, Hunan, China. He is a visiting researcher in Shibaura Institute of Technology, Tokyo, Japan in 2006.