Journal of Electrical Engineering Volume 5, Number 1, Jan.-Feb. 2017 (Serial Number 15)
David Publishing
David Publishing Company www.davidpublisher.com
Publication Information: Journal of Electrical Engineering is published bimonthly in hard copy (ISSN 2328-2223) by David Publishing Company located at 616 Corporate Way, Suite 2-4876 Valley Cottage, NY 10989, USA. Aims and Scope: Journal of Electrical Engineering, a bimonthly professional academic journal, covers all sorts of research on electronics and microelectronics, power engineering, energy materials, signal processing, communications and networking, automatic control system, optoelectronics, bioelectrical engineering and other relevant fields. Editorial Board Members: Anjan Biswas (USA), Marian Apostol (Romania), Gurevich Yuri Genrijovich (Mexico), Nader Shehata (Egypt), Roumiana Tsankova (Bulgaria), Radian G. Belu (USA), Ivan Yukhymovych Protsenko (Ukraine), M. G. Vijaya (India), Mário Pedro Guerreiro Marques da Silva (Portugal), Vladimir A. Levchenko (Russia), Waqas Ahmed Imtiaz (Pakistan), A. Sertap Kavasoglu (Turkey), Amar Rouane (France), Joon Hoon Park (Korea), Adel Bouallegue (Tunisia), Yuri Ivanovich Choni (Russia), Sameir M. Ali Hamed (Sudan), Tran Cong Hung (Vietnam), Behrooz Shahsavari (USA), Miryala Muralidhar(Japan), Fethi CHOUBANI (Tunisia), Igor Bdikin (Portugal), Hazry Desa (Malaysia), Slava Yordanova (Bulgaria), Jimsher Aneli (Georgia), Takashiro Akitsu (Japan), Cheng Song (China) and so on. Manuscripts and correspondence are invited for publication. You can submit your papers via web submission, or E-mail to
[email protected]. Submission guidelines and web submission system are available at http://www.davidpublisher.com. Editorial Office: 616 Corporate Way, Suite 2-4876 Valley Cottage, NY 10989, USA. Tel: 1-323-984-7526, 323-410-1082; Fax: 1-323-984-7374, 323-908-0457. E-mail:
[email protected] Copyright©2017 by David Publishing Company and individual contributors. All rights reserved. David Publishing Company holds the exclusive copyright of all the contents of this journal. In accordance with the international convention, no part of this journal may be reproduced or transmitted by any media or publishing organs (including various websites) without the written permission of the copyright holder. Otherwise, any conduct would be considered as the violation of the copyright. The contents of this journal are available for any citation. However, all the citations should be clearly indicated with the title of this journal, serial number and the name of the author. Abstracted/Indexed in: Cambridge Science Abstracts (CSA) China National Knowledge Infrastructure (CNKI) Google Scholar CrossRef
J-Gate Polish Scholarly Bibliography (PBN) Ulrich’s Periodicals Directory WorldCat
Subscription Information: Price (per year): Print $260; Online $160; Print and Online $300. David Publishing Company 616 Corporate Way, Suite 2-4876 Valley Cottage, NY 10989, USA. Tel: 1-323-984-7526, 323-410-1082; Fax: 1-323-984-7374, 323-908-0457. E-mail:
[email protected]
D
DAVID PUBLISHING
David Publishing Company www.davidpublisher.com
Journal of Electrical Engineering Volume 5, Number 1, Jan.-Feb. 2017 (Serial Number 15)
Contents Investigation and Analysis 1
Influence of Synchronization Impairments on an Experimental TDOA/FDOA Localization System Hugo Seuté, Cyrille Enderli, Jean-François Grandin, Ali Khenchaf and Jean-Christophe Cexus
10
Some Remarks about the Deployment of Floating PV Systems in Brazil Marco Antonio Esteves Galdino and Marta Maria de Almeida Olivieri
20
Artificial Chiral Nanostructure at Oblique Incidence Mohamed Boutria, Rachid Oussaid, Daniel Van Labeke and Fadi Issam Baida
Techniques and Methods 27
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses Robson Borges Rodrigues, Rogério Valentim Gelamo and Anderson Barbosa Lima
35
Open Source Tool for Networks Management Communication Nuno Tiago Louro Simões and Carlos Manuel da Silva Rabadão
47
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems Malinwo E. Ayikpa, Katia C. de Almeida and Guilherme C. Danielski
D
Journal of Electrical Engineering 5 (2017) 1-9 doi: 10.17265/2328-2223/2017.01.001
DAVID
PUBLISHING
Influence of Synchronization Impairments on an Experimental TDOA/FDOA Localization System Hugo Seuté1, Cyrille Enderli1, Jean-François Grandin1, Ali Khenchaf2 and Jean-Christophe Cexus2 1. Thales Airborne Systems, 2 Avenue Gay Lussac, 78990 Elancourt, FRANCE 2. Lab-STICC, UMR CNRS 6285, ENSTA Bretagne, 2 Rue François Verny, 29806 Brest, FRANCE Abstract: In Electronic Warfare, and more specifically in the domain of passive localization, accurate time synchronization between platforms is decisive, especially on systems relying on TDOA (time difference of arrival) and FDOA (frequency difference of arrival). This paper investigates this issue by presenting an analysis in terms of final localization performance of an experimental passive localization system based on off-the-shelf components. This system is detailed, as well as the methodology used to carry out the acquisition of real data. This experiment has been realized with two different kinds of clock. The results are analyzed by calculating the Allan deviation and time deviation. The choice of these metrics is explained and their properties are discussed in the scope of an airborne bi-platform passive localization context. Conclusions are drawn regarding the overall localization performance of the system. Key words: Synchronization, Allan variance, time deviation, TDOA, FDOA, passive localization, USRP (universal software radio peripheral).
1. Introduction Historically, most passive localization systems based on electromagnetic radiation have been developed in the context of EW (electronic warfare), and were denoted as ESM (electronic support measures). Various military applications have emerged, where ESM devices are mounted onboard different kinds of platforms: airborne [1], naval [2] or even spatial [3]. Passive localization systems use the properties of a signal received at different positions and/or dates in order to compute an estimate of the position of the radiating source. These systems differ from communication systems in that the source does not cooperate with the receiver, thus the waveform is unknown a priori and cannot be used to improve an estimator of the position of the source. Traditionally, these localization systems have relied on interferometry to obtain AOA (angle of arrival) Corresponding author: Ali KHENCHAF, professor, research fields: radar, sea clutter, radar cross section, sea EM scattering, complex targets EM scattering, signal processing and remote sensing.
measurements in order to triangulate the position of the source. But these measurements only have an accuracy of a few degrees and the acquisition time can be long before the location is estimated with the desired accuracy. This is why other types of measurements have been introduced. Many modern techniques used in passive localization now rely on time and frequency based measurements on different platforms. For example, many techniques are based on the calculation of T/FDOA (time/frequency difference of arrival) [1-5], and scan-based localization techniques use the dates of interception of the main lobe of a rotating emitter [6]. Since the measurements depend on the time on two or more remote platforms, several clocks are needed. All clocks have imperfections which make them drift, yet a single time base must be maintained all along the measurement time, hence the need to synchronize the devices [5]. Synchronization can be done in practice by exchanging a signal in different configurations: one-way, two-ways, common view [7]. It is also possible to dispense with a sync signal if beacons of known positions can be seen by the receivers [8].
2
Influence of Synchronization Impairments on an Experimental TDOA/FDOA Localization System
This article focuses on a system designed for combined TDOA/FDOA localization in a short-base airborne ESM context. This is a challenging scenario for a synchronized system because the measured time and frequency differences are small, thus the synchronization error must be kept as low as possible in order to have good precision [5]. In the scope of this article we will try to determine what performance in sync error we can expect in real-life situations via implementation and analysis of a full synchronization system, comprised of hardware (clocks, digital receivers) and software (delay estimation algorithm) processing. Then this will be translated in terms of localization error, in a simple scenario. The paper is organized as follows: Section 2 presents some theoretical background on clock impairments and how to characterize sync error; Section 3 describes the methodology and the experimental process of the measurements which were carried out; in Section 4 the results for two different types of embedded clocks are shown and analyzed from an operational point of view; Section 5 establishes the link between sync error and localization performances; finally global conclusions and perspectives are presented in Section 6.
2. Timekeeping Issues A clock can be modeled as a device producing a sine wave output of the form [9]: sin 2 (1) where is nominal peak output voltage, amplitude noise, nominal frequencyand phase fluctuation (noise). In the case of time and frequency analysis, we can usually ignore the term. From there we can identify two parameters of interest [9]: Time fluctuation: (2) Fractional frequency, derived from the latter: (3) Due to the non-stationary nature of , these quantities cannot be analyzed through traditional
statistics, the standard variance estimator will not converge as the number of samples increases [10]. In order to have a way to evaluate the amount of fluctuation of fractional frequency , the Allan variance was introduced [9, 11]. It measures the variance of the difference of two values of spaced by a time . An efficient estimator for the Allan variance can be expressed in terms of time data: ∑ where
2
(4)
is the time horizon on which the variance is
the sample of a dataset containing calculated, / values of sampled every , and the number of samples of contained in the time horizon ( must be an integer such as 1). Other types of variances similar to the Allan variance were developed, like the modified Allan variance, which is capable to distinguish between more types of noise [9, 12]. The expression of its estimate in terms of time data is: 1 3 1 2 ∑
∑
2
(5)
The time Allan variance is based on the modified (frequency) Allan variance and characterizes the time error of a clock [13]. It can be expressed as: /3
(6)
All the considerations stated above refer to the characterization of a single clock. But in practice it is not possible to measure the absolute fluctuations of a clock ( and ) without having another clock to use as a time reference for . Therefore and do not represent the absolute fluctuation of a single clock but the fluctuations of a clock relative to another reference clock. 0 s and 0 means that at a date the two clocks are perfectly aligned with each other and their frequency is exactly the same. can be interpreted as the standard deviation of the time error between the clocks considering an integration time of . For example, considering that the
Influ uence of Syn nchronization n Impairments s on an Experimental TDO OA/FDOA Loc calization Sys stem
3
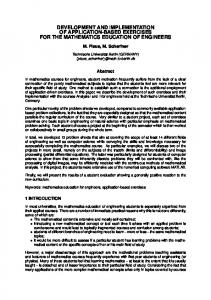
time error is a white phase p noise (such as in the simulation illustrated i onn Fig. 1a), we w have 1/√ [13] (as ( shown onn Fig. 1b). It I means thatt the lowest standdard deviationn of the errorr is attained when w ∞, so the t synchroniization proceess must appply a correction offfset correspoonding to the mean of as many m values of as possiblle. On the coontrary, if the time error caan be modeled by a white frequuency noise (like ( the simuulation in Fig. 2a), we have [ (see Fiig. 2b). In this √ [13] situation, thhe lowest staandard deviaation is achieeved when 0 i.e. 0 . In this case, the best synchronization strategyy is to sam mple at the highest frequuency and usse the vector of time errorrs to correct the tiime base, witthout any aveeraging. In the casse of a compllex noise moodel composeed of the sum of different d noisee types (for example in Fig. 3, white phasee noise and white frequency noise), the may reacch a minimuum . Againn, an function example is given g in Fig. 3. 3 There, a goood way to haave a synchronized time base may m be to com mpute the meaan of (which is sampled every e withh ) on a sliding winddow of width and use the t series of thhese means as a correction. c Similarly,, can be b interpretedd as the standdard deviation off the relative frequency f bettween the cloocks, considering an integratioon time of . Its expresssion being directlly linked to that t of , a representaation of allso reflects different d typpes of noise: for
Fig.. 1 Representtation of time error as a fun nction of timee (Fig g. 1a, top) and time deviation n as a function of integration n timee (Fig. 1b, boottom) of a siimulated white phase noisee proccess.
Fig.. 2 Representtation of time error as a function of timee (Fig g. 2a, top) and time deviattion (Fig. 2b, bottom) of a simu ulated white frrequency noisee process.
white frequeency noise, we w would havve 1 √ 1/ and for random walk freqquency noise √ . The o alsoo makes it poossible to chooose calculation of the best inteegration time value of .
in order too have the low west
Now we will try too apply thee same typee of analysis andd identify thee noise type of o real time error e data that couuld have beeen obtained inn an actual ESM E system.
3. Method dology and Measurem ments In this seection will bee described the t experimeental
Fig.. 3 Representtation of time error as a function of timee (Fig g. 3a, top) and time deviation n as a function of integration n timee (Fig. 3b, bottoom) of a simulaated noise proccess composed d of both b white phasse noise and w white frequency y noise.
4
Influ uence of Syn nchronization n Impairments s on an Experimental TDO OA/FDOA Loc calization Sys stem
protocol useed to acquiree time fluctuuation data on o a passive bi-platform localization system m. What we want w to evaluate here h is not jusst the perform mance (in term ms of time error) of o the clocks of o the receivers, but the overall performancee of a whole passive systeem, composeed of two remote receivers, r inccluding their internal i hardw ware and softwaare processinng, their clock c and their t synchronization protocoll. The receiivers used foor this experim mental studyy are two SDR (sooftware defined radio) plattforms based on a USRP B2100 (receiver #1) and a B2200 (receiverr #2) card, linkedd to a laptop computer to record the data. d This setup was chosenn because it allows quick q developmennt and expeerimentation tasks on radio r frequencies from 70 MH Hz to 6 GHz, it is quite chheap and is availaable off-the-sshelf. Experim mental studiees on TDOA havee already beenn carried out on o USRP devvices such as Ref. f. [14] but theey did not annalyze thoroughly synchronization error. Here, in order o to havee an accuratee way to meaasure time error between b two receivers, a synchronizaation
Fig. 4
Diagrram of the experimental set-u up.
Fig. 5
Diagrram of the delaay estimation process. p
systtem has beeen developedd (Fig. 4), based b on thee emiission of a peeriodic sync ssignal. The em mitter of thiss sign nal is actuallyy collocated w with receiver #1, # inside thee B21 10 card. In this experim ment two platforms p aree locaated close too each other so that the propagationn delaay can be negglected. In thee case of a reaal system thiss delaay cannot be neglected, buut it can be estimated e andd can ncelled if the platform p posiitions are kno own [15]. The T sync signnal is used forr two things: When it is i detected (via a simp ple thresholdd deteector on thee signal’s baand), the reeceivers startt reco ording a fixxed number of samples into a timee stam mped file. Thhis avoids to rrecord perman nently and too hav ve a huge amoount of data too process in the t followingg step ps. The complex envelopes of the sync s signalss reco orded by thhe two receeivers are processed p too accu urately obtainn the time diffference betw ween them. This T delay estimation proccess is descriibed in Refs.. [15] and [16]. Itt is done in foour steps, as illustrated i onn Fig. 5: First the complex c enveelopes are cross-correlated,,
5
Influ uence of Syn nchronization n Impairments s on an Experimental TDO OA/FDOA Loc calization Sys stem
Fig. 6 A rep presentation off the envelope of o the sync sign nal with
and
, sam mpled every
.
Table 1 Values of the paraameters of inteerest. P.
V Value 10 s 1 1 ns 143 2 ms 200 1 kHz 3 MHz 5 GHz
Description D S Sync signal period of emission S Sampling periodd D Duration of the record r of the sy ync signal F Frequency of thee first modulation of the sync signal s F Frequency of thee second modullation of the synnc signal N Nominal frequenncy of the locall oscillators on the t receivers annd emitter
next the points p arounnd the mainn peak of the cross-correlaation functionn are selectedd, these pointss are then interpolated by a parrabola, and fiinally the apeex of the parabolaa is computeed, which coorresponds too the final estimatte of the delaay between thhe two signals. In our experim ment, the twoo receivers are a situated right r next to eachh other so the difference off path of the sync s signal between the two platforms can be negleccted. Thus the vaalue at the ouutput of the delay estimaation of chain directtly corresponds to an estimate the tim me error betweeen each receiver. Due to thhese differentt purposes, thhere are diffeerent requirements on this signnal: When cross-correlaation is com mputed from the envelope off the signals contained c in the t two files, the cross-correlaation peak must be unambiguuous: there must be b a single peak p which occurs insidee an interval of possible p delayys. Indeed, if the sync signnal is periodic with w a shortt period—shhorter than the maximum time t offset expected beetween the two records—theere will be seeveral cross-ccorrelation peaks that could coorrespond to a consistent delay d estimation.
This cross-ccorrelation peeak needs to be narrow too imp prove the accuuracy of delaay estimation.. In Ref. [16]] it iss stated that thhe standard ddeviation of th he time offsett estiimation is prooportional to 1/ , where is the “roott meaan square raddian frequenccy” of the cro oss-correlatedd sign nals, defined by 2
∞ ∞ ∞ ∞
/
(7))
wheere iss the signal power densiity spectrum.. Hen nce the synchhronization ssignal needs to have highh freq quency compponents to provide acccurate delayy estiimation. A signal com mplying withh these requiirements hass beeen chosen arbbitrarily (reprresented on Fig. 6). It iss com mposed of a carrier modulaated in amplittude by a low w and d a high frequency signal (ssatisfying resspectively thee firstt and second requirement)). sin 2 ssin 2 (8)) wheere and are the freqquencies of th he modulatedd sign nals and is the carrierr frequency. The T settings used duringg the measu urements aree grou uped on Tablle 1.
6
Influ uence of Syn nchronization n Impairments s on an Experimental TDO OA/FDOA Loc calization Sys stem
Now that we have a system s capable of giving time t wo receivers, the fluctuations measuremennts between tw t produce thhese data in coonditions that are next step is to consistent with w operationnal contexts.
4. Measurrement Anaalysis Two expperiments haave been caarried out, each e featuring a different d typee of clock (A A or B). The same s clock type is mountedd on both receivers r onn an XO (temperaature experiment. Clocks typee A are TCX c type B are compensatedd crystal osciillator) and clocks GPSDO (GP PS disciplinedd oscillator), which are cloocks actually bassed on the saame TCXO but joined too an internal conttrol loop usinng the 1-PPS (pulse ( per seccond) signal from a GPS receivver as a refereence.
Fig.. 7 Measured d time error the two experimen nts.
between platforms, p forr
Fig. 7 reepresents twoo series of time fluctuaation measuremennts
betw ween the twoo platforms, with w
the receptionn system fitteed either withh clocks type A or clocks typee B. Fig. 8 shows thee time deviaation computed frrom the latterr measuremennts using Eqs. (4) and (5). Fig. 9 shows the Allan A deviation from the same s data, using (X). The acquisition time for thhese experimentss was 1 hourr. The Allan deviation ploot is limited to 360 s, beccause valuess of and for close to accquisition tim me may nott be relevant (lesss samples are a averagedd, the confideence interval is too t large). In I other appplications, lonnger acquisition time t is often used to analyyze the long term t behavior of a clock, but inn our context of airborne ESM, E
Experrimental timee deviation Fig.. 8 plattforms.
it appears unlikely u that the t synchronnization periood of
Clock A Clock B
0
the system exceeds e severral minutes. -9
What we can c see from the time deviiation plot (Fig. 8)
-1
10
for a long time, timee deviation
y ()
is that the freee running clocks (type A)) have good short s term time sttability but when w it is left ft unsynchronnized increeases
o a proportionallly to / , which is chharacteristic of random walkk frequency modulation m nooise [13]. Typpe A
n between
1/2
-1 -10
10
clocks reachh a minimum time deviatioon of 2.5 ns. This minimum iss reached whhen period
is avveraged durinng a
40 s (4 meaasurements).
Clocks typpe B have a worse w short teerm time stabiility,
10
1
Fig.. 9 plattforms.
2
10 (s)
Experim mental Allan deviation
between n
Influ uence of Syn nchronization n Impairments s on an Experimental TDO OA/FDOA Loc calization Sys stem
7
probably beccause of an innternal controol loop which may introduce soome high freequency noisse in the system.
TDOA/FDOA system, the ovverall standarrd deviationss of the t measurem ments errors caan be modeleed by:
Time deviattion increasess proportionaally to , whicch is representativve of a flickeer frequency modulation m n noise
(9))
[13]. But theen it becomes constant (i.e.. is affeected by flicker phase p modulaation noise) after a 60 secoonds, showing a time t deviatioon of 50 s 40 0 ns, which is cohherent with time accuracy for a GPS signal [17]. The Allann deviation plot (Fig. 9) gives g informaation about the fluuctuations off fractional freequency betw ween the platform ms. For clockks type A thee Allan deviaation decreases proportionally p y to 1/
unntil it reachees a
minimum of 1.2 10 for an inttegration tim me of 130 s. It is interestiing to note thhat the integraation time minimiizing the Allaan deviation is different from f that minimizzing time devviation. For the t other typees of clocks (typpe B), thhe Allan deviation stays s approximateely constant at 1.5 10 until 50 s then it startss decreasing proportionally p y to 1/ . If we exxtrapolate thhe results, we w see that the minimum tim me deviationn would be acchieved by using u
(10)) wheere
and
are the varriances of the instrumentall
erro or for time annd frequency m measurementts, consideredd con nstant over time and iindependent from otherr syn nchronization errors. C Considering that thesee insttrumental erroors are null, we obtain a lower boundd on TDOA andd FDOA errrors. This lower l boundd reprresents the case c where errrors are onlly due to thee imp perfect synchhronization off the system. We are now w look king for how to represent this lower bo ound in termss of localization performance ffor a simple scenario. This T scenario features twoo mobile receeivers andd following eaach other at speed and d interceptingg RF emissions frrom a target located on o their side.. Thee receivers arre separated by a distancce and thee sou urce is at a diistance aw way from the center of thee base (Fig. 10).
clock A forr 430 s and clock B otherwise. For fractional freequency deviiation (Allan deviation), clock A appears to be betterr for
60 00 s . So iff the
is high (or even infinitee: no synchronization period a to bee the sync signal exchanged), a GPSDO appears best choice.. Typically, this case caan happen iff the datalink prooviding synchhronization capabilities too the receivers iss restricted or unavailaable (for steealth purposes or because of jaamming). On the contrary,, if a short periodd synchronizzation signall is available, a standard TC CXO seems too be a better option. o
5. Localizaation Perfoormances In the prevvious sectionns we have shoown that withh the considered synchronizati s ion system, using u TCXOs and by exchangiing a synchroonization signnal every 10 sec, with the opptimal integraation time it was possiblle to attain a timee deviation off 2.5 nss and a fractiional frequency deviation d off 1.2 10 . Foor a
Fig.. 10
Geometrry of the scenarrio.
8
Influence of Synchronization Impairments on an Experimental TDOA/FDOA Localization System
Under the hypothesis that (the base is short relative to the distance to the source) which is realistic in an airborne context, it is possible to obtain easily the CRLB (Cramér-Rao lower bound) of a position estimator of expressed as Σ
[5]: its covariance matrix can be 0 ;0
with:
, Considering
50 km ,
(11) 1 km and
300 m/s , the lower bound of a position estimator considering synchronization errors only is: 38 m, 300 m. We remark that FDOA localization is more demanding in term of synchronization accuracy.
6. Conclusion One of the objectives of this paper was to point out that the tools developed in frequency analysis (and more particularly the Allan deviation and time deviation) are very useful to characterize the performances of distributed passive localization systems. These tools help understand the operational impact of technological decisions such as the choices concerning the type of oscillator or the synchronization period of the data link. The main objective was to describe the influence of a realistic synchronization scheme on the output localization performance. In order to attain this objective, a simple but realistic bi-platform system has been set up and time error data have been generated using two different sets of clock. Time and Allan deviations have been computed from these data, providing estimates of synchronization performance for the optimal integration time. These time and frequency performances were used to compute a lower bound for a localization estimator, in a simple yet relevant scenario. In the end, for the case we studied it appeared that the limiting factor was the accuracy in term of fractional frequency stability. Further work is needed to take into account the platform position error when the differential
propagation time of the sync signal cannot be neglected and must be estimated. Moreover, in this paper we only focused on time error noise, but the same principles could be extended to characterize complicated noise processes that can be present in other kinds of sensors, such as IMU (inertial measurements units).
References [1]
Arena, L., and Orlando, D. 2014. “Passive Location Developments in Elettronica SpA: System Applications.” 2014 Tyrrhenian International Workshop on Digital Communications—Enhanced Surveillance of Aircraft and Vehicles (TIWDC/ESAV), 130-4. [2] Wooller, D. 1985. “System Considerations for Naval ESM.” In IEE Proceedings of Communications, Radar and Signal Processing, F 132 (4): 212-4. [3] Yang, Z. B., Wang, L., Chen, P. Q., and Lu, A. N. 2013. “Passive Satellite Localization Using TDOA/FDOA/AOA Measurements.” In Proceedings of Conference Anthology, IEEE, China, 1-5. [4] Musicki, D., and Koch, W. 2008. “Geolocation Using TDOA and FDOA Measurements.” 2008 11th International Conference on Information Fusion, 1-8. [5] Seute, H., Grandin, J.-F., Enderli, C., Khenchaf, A., and Cexus, J.-C. 2015. “Why Synchronization Is a Key Issue in Modern Electronic Support Measures.” 2015 16th International on Radar Symposium (IRS), 794-9. [6] Hmam, H. 2007. “Scan-Based Emitter Passive Localization.” IEEE Transactions on Aerospace and Electronic Systems 43 (1): 36-54. [7] Cheng, L., Hailes, S., and Wilson, A. 2010. “Towards Precise Synchronisation in Wireless Sensor Networks.” 2010 IEEE/IFIP 8th International Conference on Embedded and Ubiquitous Computing (EUC), 208-15. [8] Pelant, M., and Stejskal, V. 2011. “Multilateration System Time Synchronization via Over-determination of TDOA Measurements.” 2011 Tyrrhenian International Workshop on Digital Communications—Enhanced Surveillance of Aircraft and Vehicles (TIWDC/ESAV), 179-83. [9] IEEE. 2009. “Standard Definitions of Physical Quantities for Fundamental Frequency and Time Metrology—Random Instabilities—Redline.” In Proceedings of IEEE Std. 1139-2008 (Revision of IEEE Std. 1139-1999)—Redline, 1-51. [10] Allan, D. W. 1987. “Should the Classical Variance Be Used as a Basic Measure in Standards Metrology?” IEEE Transactions on Instrumentation and Measurement IM-36 (2): 646-54. [11] Allan, D. W. 1966. “Statistics of Atomic Frequency Standards.” In Proceedings of the IEEE 54 (2): 221-30.
Influence of Synchronization Impairments on an Experimental TDOA/FDOA Localization System [12] Allan, D.W., and Barnes, J. A. 1981. “A Modified ‘Allan Variance’ with Increased Oscillator Characterization Ability.” In Thirty Fifth Annual Frequency Control Symposium, 470-5. [13] Allan, D. W., Weiss, M. A., and Jespersen, J. L. 1991. “A Frequency-Domain View of Time-Domain Characterization of Clocks and Time and Frequency Distribution Systems.” In Proceedings of the 45th Annual Symposium on Frequency Control, 667-78. [14] Seong, H. C., Sang, Rae, Y., Heon, H. C., Chansik, P., and Sang, J. L. 2012. “A Design of Synchronization Method
9
for TDOA-Based Positioning System.” In Proceedings of 2012 12th International Conference on Control, Automation and Systems (ICCAS), 1373-5. [15] Seute, H., Grandin, J.-F., Enderli, C., Khenchaf, A., and Cexus, J.-C. 2016. “Experimental Measurement of Time Difference of Arrival.” In Proceedings of 17th International on Radar Symposium (IRS), 1-4. [16] Stein, S. 1981. “Algorithms for Ambiguity Function Processing.” IEEE Transactions on Acoustics, Speech and Signal Processing 29 (3): 588-99. [17] GPSDO Datasheet, Ettus Research, May 2014.
D
Journal of Electrical Engineering 5 (2017) 10-19 doi: 10.17265/2328-2223/2017.01.002
DAVID
PUBLISHING
Some Remarks about the Deployment of Floating PV Systems in Brazil Marco Antonio Esteves Galdino and Marta Maria de Almeida Olivieri Cepel—Electric Power Research Center (Centro de Pesquisas de Energia Elétrica), Eletrobras, Rio de Janeiro, 21941-911, Brazil Abstract: Floating photovoltaic systems installed in water bodies such as natural lakes or dams reservoirs, have attracted increased worldwide attention since 2011 and have already been deployed in several countries, including Japan, South Korea and USA. In Brazil, pilot-projects were announced in the reservoirs of hydroelectric power plants of Balbina (State of Amazonas) and Sobradinho (State of Bahia). Several advantages, not necessarily valid in Brazil, are mentioned for deploying this kind of technology, such as an increase in energy generation, reduction of water losses through evaporation, low environmental impact, no occupation of land etc. In this article, several of these allegations are analyzed preliminarily under the Brazilian point of view, and relevant considerations are presented. It is concluded that the technical and economic advantages of floating photovoltaic systems are not yet clear in Brazil and that pilot projects, such as those under way, should be used to clarify several important aspects related to them. Key words: Floating PV systems, photovoltaics, dam reservoirs.
1. Introduction Since 2011, experimental floating PVPs (photovoltaic plants) have been deployed around the world, in which PV arrays are mounted floating on water bodies as natural lakes or artificial water reservoirs built for different purposes. Such experiments have been reported in a number of countries, including Japan, South Korea and USA. To the present, Japan can be considered the country with the most technological expertise in this field, regarding the number of existing floating PVPs in the country. Some authors have called these plants “floatovoltaics” installations. A plant with an installed capacity of 2.9 MWp, inaugurated in late March 2015 by the company Kyocera Solar, was reported as the largest existing of this type [1] at the time. This plant (Fig. 1) is located in Hyogo Prefecture, Kato city, Southwest of Honshu Island (main island of Japan), and is divided into two subarrays, floating on the lakes of Nishihira and
Corresponding author: Marco Antonio Esteves Galdino, M.Sc., research fields: photovoltaics, solar energy, solar radiation.
Higashihira, with 1.7 MWp and 1.2 MWp, respectively. The assembly of the PVP began in September 2014, so that the installation works took 7 months. An annual generation of 3,300 MWh [3] is expected to be supplied to the utility Kansai Electric Power, which means an annual capacity factor (fc) of ~13%. The company Kyocera Solar was the supplier of photovoltaic modules (11,256 Kyocera modules of 255 Wp) and also installed, operates and maintains the plant. For the assembly of the PV arrays, floating structures called “Hydrelio ©” made of high density polyethylene—HDPE, patented (and supplied) by the French company Ciel et Terre [4] are adopted. The polymeric material is said to be the same used in marine signaling buoys and the assembly does not use metal parts, being made by means of fittings only. In December 2014 Kyocera announced [5] the construction of a floating PVP of 13.4 MWp at the Yamakura Dam Reservoir, in Chiba Municipality (near Tokyo), occupying an area of 180,000 m2 and an expected generation of 15,635 MWh/year (annual fc: ~13.3%) to be sold to TEPCO (Tokyo Electric Power Co). Kyocera also had plans to build 30 floating PVPs
Some Remarks about the Deployment of Floating PV Systems in Brazil
Fig. 1
Floating PV system in Hyogo—Japan (Source: Ref. [2]).
Fig. 2
Floating tracking PV system in Korea (Source: SolarPark Korea).
in Japan from 2015 to 2016. South Korea also has accumulated experience in floating PVPs, having installed a 465 kWp (occupied area of 8,000 m2) experimental system in 2014 which was said to be the only floating plant with solar tracking [6] at that time, and whose efficiency would be 22% higher than that of an equivalent plant mounted on the ground (Fig. 2). In the USA, which has already several smaller floating PV installations, a 12.5 MWp plant in the State
11
of California was announced, following a business format in which the lakes will be used under a grant by the owner to the generating company, through a leasing mechanism [7]. Fig. 3 shows the diagram of one possible configuration for a floating PV plant and its main components. PV array: there are already available PV modules specially designed for floating PV arrays [8], with improved waterproof characteristics;
12
Fig. 3
Some Remarks about the Deployment of Floating PV Systems in Brazil
Diagram of a floating PV plant (Source: adapted from Ref. [8]).
Floating Structure: must be specified in order to resist the wind speed, wave height and water velocity (current) expected at the site; Achoring: must be designed to cope with the expected variation in the water level, as well as with the forces due to wind, waves, and current; Cables: submersible cables shall be used, as well as watertight junction boxes etc. Inverters and substation: conventional installation, comprising the grid-connected inverters, switchgear, transformers, protection etc.
2. Floating PV Plants in Brazil In Brazil, pilot projects of 5 MWp floating PV plants in the lakes of the hydroelectric power plants of Sobradinho (State of Bahia, Northeast region of Brazil) and Balbina (State of Amazonas, North region) were announced [9], to be started in 2015, by the federal utility companies Chesf and Eletronorte, respectively, attracting international interest [10, 11]. The first floating PV installation in Brazil was inaugurated on March, 4th, 2016 in the Balbina reservoir, comprising an area of only 60 m2, and is considered as an initial phase of the pilot project for deployment of floating PV in the country. Another floating PV installation was put into operation in August, 2016 [12], comprising 25 kWp of c-Si modules and 25 kWp of thin film modules, occupying approximately 500 m2, in the reservoir of the hydro power plant of Porto Primavera (State of São
Paulo, Southeast region of Brazil). This is an independent installation and is not a part of the above mentioned pilot project.
3. Technical Advantages of Floating PV Plants Several technical advantages that have been attributed in literature to floating PV systems are listed below and it is shown that some of them need better investigation und understanding. (1) The evaporative cooling of PV modules and cables caused by the water body increases the efficiency of the system An analysis of the performance of floating 100 kWp and 500 kWp photovoltaic systems installed by the company K-Water (Korean Water Resources Corporation) at the Hapcheon dam reservoir was performed by Ref. [13], comparing the performance of these systems with a conventional 1 MWp photovoltaic plant mounted on the ground (located about 60 km south of Hapcheon). This study indicates that the efficiency of the floating system is 11% higher than the conventional one since the floating systems operate at a lower temperature than the ground system, because of the evaporative cooling provided by the reservoir. However, an analysis from the economic point of view was not made, in order to evaluate if the economic gain with the improvement of performance surpasses the higher cost of the floating system. It should be remarked that the evaporative cooling is
Some Remarks about the Deployment of Floating PV Systems in Brazil
a function of the Wet Bulb Temperature (Twb) of the site, in turn dependent on the ambient temperature and relative humidity, as well as the wind speed. In the Brazilian case, the 11% increase in efficiency noticed in Korea is not necessarily valid since, being a tropical region, and given the country size and geographical diversity, its environmental conditions are not only very different from Korea but also different in each region. In the Brazilian pilot projects, it can be forecasted that the floating PV plant to be installed at the Sobradinho reservoir, located in a place with low relative humidity (semi-arid region) and high wind speed (yearly average wind speed of 5,6 m/s at a height of 50m), could benefit greatly from the cooling effect. However, in the case of Balbina reservoir, this effect will provide a much more limited increase in the efficiency of the floating PV system, since it is located in a region (Amazon region) with high air humidity and low wind speed (yearly average wind speed of 2,96 m/s at a height of 50m). (2) The floating structure reduces the evaporation of the free surface of the water, keeping the volume of stored water The shading provided by the floating structure reduces the incidence of solar radiation in water, and therefore its temperature. In addition, the presence of the floating PV array covering the free surface of the water also reduces the effect of the wind on this surface. These two factors together contribute to the reduction of water evaporation. This type of benefit, however, is very difficult to quantify, i.e. it is very difficult to determine how much water would be lost without the floating PV array. It should also be mentioned that this effect is physically conflicting with the previous one, that is, the less evaporation in the reservoir, the lower the evaporative cooling caused by the water body and the lower the efficiency increase of the photovoltaic array. The net evaporation rate of the Balbina reservoir is only 122 mm/m2.year, while for the Sobradinho reservoir it reaches 1,946 mm/m2.year [14], so
13
demonstrating that the advantages of reducing losses and increasing efficiency by evaporative cooling in Balbina will be clearly much lower than in Sobradinho. (3) The floating PV array reduces algae growth It is reasonable to assume that the shading provided by the PV array, reducing the incidence of solar radiation in the water, also reduces the growth of algae (phytoplankton). This effect has also not yet been quantified, and certainly also depends on the fraction of the area of water surface covered by the PV array. Supposedly it could be beneficial for lakes with an environmental problem called eutrophication, which is an anomalous algae (and other aquatic plants) growth, sometimes referred to as “green tide”, caused by the presence of excess of nutrients (mainly Nitrogen and Phosphorus compounds) dissolved in the water. Such an overload of nutrients can be the result of human activities (agriculture etc.). This is surely not the case of the lakes of Sobradinho and Balbina in Brazil. On the other hand, light blocking and reduction of algae growth may constitute a possible significant environmental impact of the PV plant on the natural ecosystem of the reservoir. (4) The floating structure reduces the formation of waves and, thus, the erosion of the banks of the reservoir As already mentioned, in principle, the presence of the floating structure reduces the effect of the wind on the free surface of the water, as well as the consequent formation of waves and thus the wave erosion in the banks. The result, again, depends greatly on the fraction of the area occupied by the PV array, and its quantification as well as understanding of its actual benefit is very difficult to evaluate. (5) A floating PV system installed in the reservoir of a hydroelectric power plant saves water in that reservoir, replacing part of its generation Some authors say that a form of combined operation of the PV power plant with the hydroelectric plant would save water, as it could generate less hydro power during the day, being complemented by the PV
14
Some Remarks about the Deployment of Floating PV Systems in Brazil
generation. However, to do so, the installed power required for the PV plant should be of an order of magnitude comparable with the hydro power plant, which in Brazilian pilot projects should mean at least dozens of MW (Sobradinho: 1,050 MW and Balbina: 250 MW), what is not yet considered feasible. Even if such big floating PV plants could be built in Brazil, the combined generation is not simple to implement in practice, since the dynamics of variation of PV generation occurs in intervals of seconds (cloud passages), and cannot be compensated by the generation of the hydro power plant, whose time constant is much larger. This creates an operational difficulty for the maintenance of a certain constant value of generation, which is pre-established in a mandatory schedule in Brazil. In order to overcome this, energy storage (Li-ion batteries, H2 etc.) could be associated to the PV plant, but this would add complexity to the system and increase significantly its cost. Therefore, the combined operation can still be considered a topic for R&D. In fact, conceptually, any PV generation connected to the grid in Brazil contributes to reducing the overall hydraulic generation (the base generation in Brazil is hydraulic) and, thus, to saving water in the reservoirs, but this does not apply to a specific installation, only to the national electrical system as a whole. In a combined installation of this type (floating PV plant and hydro plant), it is conceptually more correct to consider that the PV plant as an additional generation, is practically independent from the hydro generation. (6) A floating PV system installed in the reservoir of a hydro power plant does not require investment in transmission infrastructure, since the existing infrastructure can be shared According to the Brazilian technical regulations, high voltage transformers must be able to withstand daily overloads of 120% for 4 hours and 140% for 30 minutes. Therefore, in a preliminary analysis, if the power of the floating PV plant is less than 40% of the hydro power plant, then the infrastructure
(transmission line, substation, transformers) can effectively be shared, since the PV system operating in tropical conditions, even considering the evaporative cooling, would not operate at its rated power for a daily period greater than 30 minutes. This can be considered the most important advantage of floating PV installations in the reservoirs of hydro power plants in Brazil, causing a significant cost reduction. The possibility of using the existing infrastructure for PV plants with installed power beyond this 40% limit must be evaluated specifically in each case. It depends on the ratio of the installed power of the PV plant and the hydro plant, and mainly on the operating regime of the hydro power plant. For example, in the case of a hydro plant with a small reservoir and a significant amount of PV power, and in which the wet period (rain season) coincides with the maximum solar radiation period, the capacity of the existing transmission line and transformers may not be enough for the simultaneous operation of both plants at full capacity. This would limit the economic benefit or require extra investment in the transmission infrastructure. On the other hand, even in this case, the advantage of sharing may exist if there is a complementarity behavior between the wet period and the incidence of solar radiation at the site. In the case of Balbina plant, for instance, it can be noticed that there is a coincidence between the operating regime of the hydro plant and the distribution of solar irradiation throughout the year, as shown in Fig. 4. So, if the installed floating PV power in Balbina is beyond the 40% limit, then investment in the transmission infrastructure could be necessary. (7) The fact that the floating system does not use a land area is a great economic advantage In the case of Japan, the fact that the floating PV plant does not use land areas is generally cited as an important economic advantage [17], due to the restricted availability and high cost of land in the country. In Korea and in the USA, this argument also
Some Remarks about the Deployment of Floating PV Systems in Brazil
seems to be valid. In the case of Brazil, however, this type of advantage is, in general, much less important and should be subject of a specific economic analysis. (8) The reflectivity (albedo) of the water increases
15
the incidence of radiation in the PV array and, therefore, its energy generation Fig. 5 shows the specular reflectivity of the water (albedo) for direct radiation as a function of the angle
Fig. 4 Operating regime of Balbina hydro power plant and global solar irradiation on horizontal plane (GHI) throughout the year at the site. The energy generation data from Balbina refers to monthly averages for the year 2012 according to the source [15] and the solar irradiation corresponds to daily monthly averages available at the solar radiation database of Cepel [16] (standard year).
Fig. 5 Albedo of water for the incidence of direct solar radiation, as a function of the angle of incidence (in relation to normal incidence 0°), for clean water (without suspended material) and still water surface (no ripple at the surface). The bottom curve (red line) refers to horizontally polarized light and the upper curve (blue line ) to vertically polarized light. The average line curve (green color) is considered representative of natural solar radiation. (the graphic was made using Fresnel equations for refraction and reflection)
16
Some Remarks about the Deployment of Floating PV Systems in Brazil
of incidence, where one can notice that, for incidence angles in the range of 0° (normal incidence) to approximately 58°, the water surface reflectivity is less than 5%. The reflectivity of a real liquid surface is more complex, however, because it depends on other factors, such as its ripple (waves) and suspended material. Ripple at the surface usually tend to cause the reflected radiation to be scattered in all directions, but may increase reflectivity at low angles of incidence. Additionally, the degree of polarization of light varies throughout the day tending to be higher in the early morning and late afternoon, so that the reflectivity may change at these times. Anyway, the albedo of the soil is, in general, considered in the range between 15% and 30%. According to Fig. 5, the water reflectivity may only be higher than this value for solar angles of incidence above 70°, so that this factor could contribute significantly to increasing irradiance on a floating PV array only in places of high latitudes (lower position of sun in the sky), which is not the case of Brazil. On the other hand, it is also known that the composition and amount of the suspended material in the water may increase the surface albedo, which could be the case in the North region of Brazil, but this is a factor whose significance for the increase in radiation incidence on the array could only be quantified on a case-by-case basis.
4. Additional Considerations about Floating PV Systems in Brazil In Brazil, some additional questions and considerations concerning the floating PV systems must be raised, which are listed below. (1) Endurance to environmental factors According to the manufacturer, the “Hydrelio ©” floating mounting system, adopted in Japan, is expected to be resistant to UV radiation for more than 20 years. We understand, however, that this is still to be proved in tropical regions, with higher incidences of
solar radiation (and higher UV index) and higher ambient temperatures. In addition, by observing available photos, it can be noticed that floating PV systems in other countries have been deployed in lakes with clear water, free of suspended material and of floating debris. In many cases in Brazil, particularly in the North region (Amazon region), the operating conditions can be quite different: water with presence of suspended material (earth/clay), as well as floating material such as branches and leaves, and even floating trunks (logs). There is even a Portuguese word—“balseiros”—to refer to the floating clusters of leaves, branches, soil, grass etc., which descend the rivers during the flood season in the Amazon region. The consequences of this factor should be investigated and probably imply in greater needs for cleaning and maintenance of the floating PV array, and even the need of devices called “floating booms” installed around the floating PV arrays to avoid damages. The so called “floating booms” are floating barriers sometimes used to protect the water intake of hydro power plants from debris in the water. Still according to the manufacturer, the floating structure “Hydrelio ©” withstands wind speeds of up to 118 mph (~ 52.8 m/s). We understand that the manufacturer ensures that the structure is not damaged by this worst wind condition. However, we believe that the structure would be partially submerged due to strong frontal winds, so that photovoltaic modules and other components must be resistant to this submersion condition. In addition, it is important to clarify that wind resistance does not depend only on the floating structure itself, but mainly on its anchoring (mooring) system. In the project, one should consider the highest known wind speed in the area, but it should be remembered that these parameters are measured in ground meteorological stations. It is known that the wind speed of a given site is a function of the surface roughness, so that on large liquid surfaces, it can reach higher values than on the ground. Thus, for sizing
Some Remarks about the Deployment of Floating PV Systems in Brazil
purposes, there shall be considered the use of some mathematical model in order to compute the wind velocity over the liquid surface, based on the highest known wind velocity in the nearby land area. On the other hand, Choi [13] has already verified that the floating structure can be moved and spinned by the wind, and, mainly, that this movement can have a significant effect on the generation efficiency, concluding that the development of new anchoring systems is necessary. In Brazil, water reservoirs of hydro power plants can reach extremely low water levels. Sobradinho reservoir, for instance, was operating close to the minimum acceptable volume in November 2015. Therefore, in Brazil the anchoring system should be designed expecting large reservoir water level variations throughout the year. It cannot be ruled out that the floating mounting structure should withstand resting on the bottom (possibly irregular) of a dry reservoir. It is also well known that, even in the North region (Amazon), the variation of the area occupied by the reservoir between the flood season and the dry season is quite significant, and this is the case of the Balbina reservoir. Another concern in Brazil is the wave height in the reservoirs, which is a function of not only the wind speed, but also of its extensions. The lake of Balbina has an extension of 225 km and Sobradinho has 350 km, what can imply in wave heights higher than those verified in the reservoirs with floating plants in other countries, that the floating structures and anchoring systems must resist. (2) Installation and maintenance costs According to Ref. [18], the installation cost of a floating PV system of 1.2 MWp was 30% higher than that of a conventional system, but it warns that this value is probably due to being the first of this size installed. According to Ref. [7], in the USA, floating systems with installed power above 10 MWp would have a cost similar to conventional installations on the ground. Lee [8] informs that the 100 kWp floating
17
plant built at Hapcheon (South Korea) had a cost of US$ 6.4/Wp, but the bigger installation of 500 kWp at the same place reached US$ 4.35/Wp due to improvements. Components such as submersible cables, waterproof PV modules and junction boxes that are resistant to submersion of course have higher costs than conventional ones. The installation of the system is also more difficult and costly. Apparently, this extra cost is offset by the fact that the system does not use land, which results in a cost reduction. As aforementioned, this cost advantage is not necessarily valid in Brazil, depending on the area of the country where the installation will be deployed. The maintenance cost of a floating system is also clearly higher than that of conventional systems, since access to the PV array is much more difficult and depends on the availability of motorboats and technical personnel able to operate them. (3) Environmental impacts The literature generally states that floating PV systems have low environmental impact and do not impair the cleanliness of water, although the issue of algae growth reduction, already mentioned, may represent an environmental impact that can be significant if a large fraction of the free water surface of the reservoir is covered by the floating PV array. In this respect, in Brazil it is strongly advisable that the PV array has the maximum possible light transmittance, which can be achieved by adopting PV modules of glass-glass type (glass on the back surface). In addition, Solaris [19] raises the question related to the oxygenation of the water body, stating that the gas exchange at the water surface must be investigated in order to assure the maintenance of the lake fauna and flora, suggesting that covering a large portion of the surface by a PV array can represent an important impact also in this respect. Reduction of oxygenation can even increase greenhouse gas emissions from the reservoir. On the other hand, an indirect and beneficial
Some Remarks about the Deployment of Floating PV Systems in Brazil
18
of area covered. It will be very different in different
Since the costs of installation, maintenance for floating PVPs are higher than conventional plants, the technical and economic advantages of such floating systems over conventional PV installations are not yet clear in Brazil and will be different for each region. The main economic advantage in Brazil seems to be the sharing of the existing transmission infrastructure. Considering the aforementioned issues, it is expected that the pilot project of floating PV to be deployed in the Balbina and Sobradinho reservoirs will provide important clarifications, mainly in relation to efficiency issues, compared to a system installed on the ground and reduction of evaporative losses in the reservoir. An environmental assessment regarding items such as light incidence in water, algae growth and oxygenation should also be performed. To do so, these systems must be fully monitored by means of a set of sensors, including electrical and environmental quantities, allowing to evaluate such parameters.
locations in Brazil, and needs to be better quantified;
References
environmental impact of the floating PV plant is that it can avoid deforestation, what sometimes can be necessary in order to build a conventional PV installation on the ground.
5. Conclusions This paper presents several considerations regarding the application of floating PV plants in Brazil, whose peculiarities make them different from those that have been deployed in other places, such as Japan and Korea, for example, and are summarized below: It is estimated that the increase in the efficiency of the floating PV plant due to evaporative cooling may be significant in the Northeast region of the country (Sobradinho reservoir), but not significant in the North region (Balbina reservoir); The beneficial effect of reducing water loss by evaporation from the reservoirs depends on the fraction
The combined operation of the PV and hydro plants is not considered feasible, but may be a topic for
[1]
R&D, perhaps associated to an energy storage system; The
sharing
of
the
existing
transmission
infrastructure is probably the biggest advantage of the
[2]
floating PV plants to be deployed in Brazil in reservoirs of hydro power plants; Large scale floating PV plants can have a
[3]
significant environmental impact by reducing algae growth and water oxygenation, and to minimize the first effect, glass-glass photovoltaic modules shall be used in Brazil;
[4]
The resistance of PV array floating mountings to conditions of solar radiation and temperature in tropical regions, as well as to water with suspended material and floating debris must be ensured in Brazil;
[5]
The floating structure and its anchoring system must withstand large variations in the water level, including the possibility of resting on the bottom of a dry reservoir. High wave heights are also to be expected;
[6]
Colthorpe, A. 2015. “Another Floating PV Plant Completed by Kyocera JV in Japan.” May 28th, 2015. http://www.pv-tech.org/news/another_floating_pv_plant_ completed_by_kyocera_jv_in_japan. Owano, N. 2015. “Japan Has Floating Solar Power Plants in Hyogo Prefecture.” April 24th, 2015. http://techxplore.com/news/2015-04-japan-solar-power-h yogo-prefecture.html. Upadhyay, A. 2015a. “Kyocera TCL Solar Completes Two Floating Solar Power Plants In Japan.” April 27th, 2015. http://cleantechnica.com/2015/04/27/kyocera-tcl-solar-co mpletes-two-floating-solar-power-plants-japan/. Upadhyay, A. 2014. “World’s Largest Floating Solar Power Plant Announced by Kyocera.” December 25th, 2014. http://cleantechnica.com/2014/12/25/worlds-largest-floati ng-solar-power-plant-announced-kyocera/. Japan Times. 2014. http://www.japantimes.co.jp/news/2014/12/23/business/k yocera-to-build-13-4-megawatt-floating-solar-power-plan t-near-tokyo/#.Vlm0dHbnuUk. Osborne M. 2014. “SolarPark Korea’s PV Modules Used in Floating Tracker Power Plant.” December 12th, 2014. http://www.pv-tech.org/news/solarpark_koreas_pv_modu les_used_in_floating_tracker_power_plant.
Some Remarks about the Deployment of Floating PV Systems in Brazil [7]
[8]
[9]
[10]
[11]
[12]
[13]
Pyper, J. 2015. “Sonoma County Is Building the Largest Floating Solar Project in the US.” March 11th, 2015. http://www.greentechmedia.com/articles/read/sonoma-co unty-to-build-the-largest-floating-solar-project-in-the-us. Lee, D.-H. 2015. “New Technology of the Floating Photovoltaic Power Plant on the Reservoirs of Dams.” April, 14th, 2015. https://www.kwater.or.kr/web/download/forum/09-1_PS.pdf. Gandra, A. 2015. “Projeto-piloto de geração de energia solar em reservatórios começa em 120 dias.” March, 27th, 2015. Agência Brasil. http://agenciabrasil.ebc.com.br/economia/noticia/2015-03 /projeto-piloto-de-geracao-de-energia-solar-em-reservator ios-comeca-em-120. Clark, L. 2015. “‘Mega’ Floating Solar Power Plants Open in Japan.” April 21st 2015. http://www.wired.co.uk/news/archive/2015-04/21/giant-fl oating-solar-panel-plant-japan. Upadhyay, A. 2015b. “Brazil Announces Huge 350 MW Floating Solar Power Plant.” April 6th, 2015. http://cleantechnica.com/2015/04/06/brazil-announces-hu ge-350-mw-floating-solar-power-plant/. SP. 2016. Secretaria de Energia e Mineração, Governo do Estado de São Paulo. “São Paulo coloca em operação a primeira usina solar flutuante do Brasil.” 29/09/2016. http://www.energia.sp.gov.br/2016/09/sao-paulo-coloca-e m-operacao-primeira-usina-solar-flutuante-do-brasil/. Choi, Y.-K. 2013. “A Study on Power Generation
[14]
[15]
[16]
[17]
[18]
[19]
19
Analysis of Floating PV System Considering Environmental Impact.” International Journal of Software Engineering and Its Applications 8 (1): 75-84. http://dx.doi.org/10.14257/ijseia.2014.8.1.07. ONS—Operador Nacional do Sistema Elétrico. 2015. “Inventário de Dados Técnicos de Aproveitamentos Hidroelétricos.” http://www.ons.org.br/operacao/hidrologia.aspx. Eletrobras, GTON—Grupo Técnico Operacional da Região Norte. 2013. “Plano Anual de Operação dos Sistemas Isolados para 2013.” Versão 1.0. 19/11/2012. Galdino, M. A. E., and Gomes, C. M. 1996. “SUNDATA 2.0. Brazilian Solar Resource Database.” Cepel—Electric Power Research Center. Cresesb—Centro de Referência para Energia Solar e Eólica Sérgio de Salvo Brito. http://www.cresesb.cepel.br/index.php?section=sundata. Colthorpe, A. 2014. “Kyocera Sees Floating PV as One Solution to Japan Land Shortages.” September 1st, 2014. http://www.pv-tech.org/news/kyocera_sees_floating_pv_ as_solution_to_japan_land_shortages. Kato, S. 2013. “‘World’s Largest’ Floating Solar Plant Operates on Reservoir.” November, 17th, 2013. http://techon.nikkeibp.co.jp/english/NEWS_EN/2013111 7/316700/#. Solaris. 2015. Information about the floating PV plant to be installed by the company Solaris Synergy Ltd. at Cadarache (France). Consulted in June, 2015. http://www.eurekanetwork.org/content/e-5044-aquasun.
D
Journal of Electrical Engineering 5 (2017) 20-26 doi: 10.17265/2328-2223/2017.01.003
DAVID
PUBLISHING
Artificial Chiral Nanostructure at Oblique Incidence Mohamed Boutria1, 3, Rachid Oussaid1, Daniel Van Labeke2 and Fadi Issam Baida2 1. Université des Sciences et de la Technologie Houari Boumediène, Alger, Algérie 2. Département d’Optique P.M. Duffieux, Institut FEMTO-ST, Université de Franche–Comté, France 3. Ecole Normale Supérieure, Kouba, Alger, Algérie Abstract: We propose in this paper the design of artificial nanostructure chirality obtained by oblique illumination. This structure is based on anisotropic metamaterial having an optical activity induced by the special geometry of the pattern and the incident beam. Starting from a non-chiral material, the artificial chirality is obtained thanks to the rectangular apertures which form the periodic perfect metal nanostructure (one layer) and the oblique incidence of the light beam. An extraordinary light transmission (93%) through the metal nanostructure is achieved by exciting the cavity modes. The extrinsic chirality obtained can be granted to the desired value by appropriately adjusting the geometric parameters and the angle of incidence. Key words: Nanostructure, optical activity, extrinsic chirality, metamaterial.
1. Introduction It is well-known that light can propagate through apertures whose dimensions are larger than the wavelength of the incident wave. When the apertures are smaller than the wavelength of the incident wave r 80%) at the working wavelength. Although the optical activity is often associated with chiral-3D structures (intrinsic chirality). Such nanomaterial can be complex and difficult to fabricate [13]. Other methods are used for the design and production of chiral materials like the phenomena caused either by orbital hybridization [14-16] or near-field, dipole-dipole interactions between chiral molecules and particle plasmon [17, 18]. A hybrid nanoplasmonic material was suggested by which chiroptical behavior can be induced in the resonances of achiral plasmonic nanostructures, driven by radiative electromagnetic coupling between metallic particle plasmons and a surrounding chiral isotropic medium [19]. The optical rotation can also occur at oblique incidence on flat achiral structures (extrinsic chirality) [20]. Planar metamaterials should show optical activity of transmission and reflection, if the 3D extrinsic chirality is associated with the mutual orientation of the incident beam and metamaterial pattern. Team of Zhedulev stressed that under certain conditions, the circular birefringence and circular dichroism (3D effect) can be obtained with achiral planar metamaterials [21, 22]. It is well known that the negative-index mode in planar metal/insulator/metal structures can only be excited at oblique incidence angles and at a specific polarization. In 2010, Stanley et al. [23] demonstrated that a two-dimensional array of vertically oriented (MIM) coaxial waveguides, arranged in a dense hexagonal configuration, functions as a single-layer wide-angle negative index material down to the blue part of the
21
visible spectrum. Since then, few studies have been undertaken on this topic. The effect reported in Ref. [19] is the incident and scattered light which drives a chiral polarization of the surrounding molecular material which subsequently couples electromagnetically to the plasmonic resonance of the metallic nanostructure. The aim of our study is to get an optical rotation with a single layer nanostructure with a maximum of transmission of light in the visible range. Starting from a non-chiral material, the artificial chirality is obtained thanks to the rectangular apertures which form the periodic nanostructure (one layer). The rotation is induced by the particular geometry of the configuration and the manner in which the structure is illuminated (oblique incidence).
2. Presentation of the Structure The proposed structure is presented in Fig. 1. It is consisting on array of rectangular subwavelength apertures perforated in a perfectly conducting metal film (PEC) with a thickness (h) and a period p. Each cell consists of two rectangles having different geometric parameters (ax1 = 0.1p, ay1 = 0.76p, ax2 = 0.71p, ay2 = 0.1p). The structure is supposed to be illuminated by a linearly polarized plan wave at oblique incidence, freely suspended in vacuum and the cavities are fulfilled by air.
3. Structure Optimization We well know that the optical activity of a medium is characterized by the rotation of the polarization plane of linearly polarized waves during its propagation. The optical rotation will be obtained after calculating the transmission spectra for two incidents orthogonal (p and s) polarization states [5]. The transmitted field components are connected to the incident field ones by the transmission Jones matrix T (in the straight-line basis).
22
Artificial Chiral Nanostructure at Oblique Incidence
Fig. 1 Schematic of the proposed structure: each cell has two rectangular apertures orthogonal with the following dimensions: ax1 = 0.1p, ay1 = 0.76p, ax2 = 0.71p, ay2 = 0.1p, h = 0.1p. The top view made over one period shows the geometrical parameters of the slits.
(1) The optical activity is then deduced by determining the rotation angle of the transmitted field with regard to the incident one. The rotation is calculated through the expression of the transmission Jones matrix Tc (expressed in the circular basis). This latter is obtained by: Λ 1 √
1
Λ
(2)
is the basis change matrix.
Now, the transmission matrix directly relates the incident and transmitted electric fields in terms of right-handed
(RCP),
and
left-handed
(LCP),
circularly polarized components. The angle of rotation is then directly deduced from the diagonal elements of Tc through [24]: Ø
(3)
Ø is the phase difference between the transmitted RCP and LCP waves. For the optimization of the structure, we used the BMM (bimodal modal method). First, we studied the influence of the thickness (h) on the rotation. We set
the angle of incidence (θ = 20°) and we varied the thickness (from 0.1p to 0.6p) with an increment of 0.1p. The result is shown in Fig. 2. It is clear that the rotation slightly increases with the thickness function of the wavelength. This result is consistent with the theory which stipulates that the phase shift is related to the distance traveled by the wave along the optically active medium. Then we studied the influence of the illumination angle θ on the rotation while fixing the value of the thickness (h = 0.1p). Fig. 3 shows the spectra of the rotation function of the wavelength for each value θ varying from 5° to 30° with a pitch of 5°. We can see that the rotation increases with the incidence angle θ, and the peaks are shifted slightly to higher wave lengths. The various calculations have shown that the optimal values of the thickness and the angle of incidence for a better transmission of light through the structure are: h = 0.1p and θ = 20°. For the structure with the same geometrical parameters apertures we plotted the transmission spectrum and the rotation for the p and s polarizations for normal and oblique incidence (θ = 0° and θ = 20°) (see Fig. 4).
Artificial Chiral Nanostructure at Oblique Incidence
23
Fig. 2 Spectrum representing the rotation function of the wavelength for different values of the thickness h and for an angle of incidence θ = 20°.
Fig. 3 Spectrum representing the rotation function of the wavelength for different values of the angle θ and for fixed value h = 0.1p.
Figs. 4a and 4b show the transmission and the rotation in the case of normal incidence, while Figs. 4c and 4d show the same spectra in the case of oblique incidence. For the oblique illumination we found a 75% transmission (greater than the transmission at normal
incidence) of the incident wave and a rotation of 0.2733 radians (15.66°) from the plane of polarization at the working wavelength λc = 1.522p, whereas in normal incidence the rotation is of the order of 10-4 (negligible).
24
Artificial Chiral Nanostructure at Oblique Incidence
Fig. 4 Transmission spectrum as a function of lambda for the p and s polarizations.
Fig. 5 Transmission spectra function of lambda for p and s polarizations.
Artificial Chiral Nanostructure at Oblique Incidence
4. Simulation with the FDTD Method In the plane (xy), the calculation window is equal to a square unit cell (px × py). The direction of propagation is along the z axis. The periodic boundary condition is used along x- and y-directions in order to create the array behaviour and perfectly matched layer boundary condition is used along z-direction. For the spatial discretization, a step of 2 nm was used in the three directions (δx = δy = δz = 2 nm). The period p is taken equal to 300 nm and the oblique incidence is θ = 20° for a thickness h = 0.1p. The structure is supposed suspended in the void. Fig. 5 shows the transmission of the incident wave through the two apertures for two incidents orthogonal (p and s) polarization states. One can see that at the wavelength λ = 1.607p, 93% of the incident light is transmitted. The calculation of rotation at the working wavelength with Eq. (3) gives the following result: Ø 0.4085 radians (23.4°).
5. Conclusions We have presented a design of an extrinsic chiral nanostructure consisting of an array of rectangular apertures engraved in a perfectly conducting metallic film of thickness h = 0.1p. This subwavelength structure is constituted by a non-chiral material and which nevertheless has an artificial chirality induced through the structuring of the material and the nature of the incidence (oblique). The FDTD calculations showed optical activity of 23.4° under oblique incidence (θ = 20°). An extraordinary transmission (93%) through the metal nanostructure is obtained by exciting the cavity modes. With this work, we feel that we have contributed to the design of artificial chiral nanostructures and we showed the possibility of an extrinsic chirality from a non-chiral metallic structure. This opens the way to design a new type of chiral structures. Such a study can be extended to design artificial chiral structures operating in terahertz or microwave domains.
25
Acknowledgements The authors thank the Department of Optical PM Duffieux FEMTO-ST (Besançon, France) for their collaboration and for technical assistance (FDTD calculation).
References [1]
Ebbesen, T. W., Lezec, H. J., Ghaemi, H. F., Thio, T., and Wolff, P. A. 1998. “Extraordinary Optical Transmission through Subwavelength Hole Arrays.” Nature 391: 667. [2] Gordon, R., Brolo, A. G., McKinnon, A., Leathem, B., Rajora, A., and Kavanagh, K. L. 2004. “Enhanced Transmission of Thz Radiation Through Subwavelength Holes.” Phys. Rev. Lett. 92 (3): 037401. [3] Klein Koerkamp, K. J., Enoch, S., Van Hulst, N. F., Segerink, F. B, and Kuipers, L. 2004. “Strong Infuence of Hole Shape on Extraordinary Transmission through Periodic Arrays of Subwavelength Holes.” Phys. Rev. Lett. 92: 183901 1.4. [4] Baida, F. I., Boutria, M., Oussaid, R., and Van Labeke, D. 2011. “Enhanced-Transmission Metamaterials as Anisotropic Plates.” Phys. Rev. B 84: 035107. [5] Boutria, M., Oussaid, R., Van Labeke, D., and Baida, F. I. 2012. “Tunable Artificial Chirality with Extraordinary Transmission Metamaterials.” Phy. Rev. B 86: 155428. [6] Lindman, K. F., Ann. 1922. “Uber die durch ein acktives ramgitter erseugt rotaions polarisation der elektromagnetischen wellen.” Phys. 69: 270. [7] Rogacheva, A. V., Fedotov, V. A., Schwanecke, A. S., and Zheludev, N. I. 2006. “Giant Gyrotropy Due to Electromagnetic-Field Coupling in a Bilayered Chiral Structure.” Phys. Rev. Lett. 97: 177401. [8] Papakostas, A., Potts, A., Bagnall, D. M., Prosvirnin, S. L., Coles, H. J., and Zheludev, N. I. 2003. “Optical Manifestation of Planar Chirality.” Phys. Rev. Lett. 90: 107404. [9] Takahashi, S., Potts, A., Bagnall, D., Zheludev, N. I., and Zayats, A. V. 2005. “Near-field Polarizationconversion in Planar Chiral Nanostructures.” Opt. Commun. 255: 91-6. [10] Zhang, W., Potts, A., and Bagnall, D. M. 2006. “Giant Optical Activity in Dielectric Planar Metamaterials with Two-Dimensional Chirality.” J. Opt. A 8: 878-90. [11] Miyamaru. F., and Hangyo, M. 2006. “Strong Optical Activity in Chiral Metamaterials of Metal Screw Hole Arrays.” Applied Physics Letters 89 (21): 211105. [12] Kuwata-Gonokami, M., Saito, N., Ino, Y., Kauranen, Mr., Je_movs, K., Turunen, J., Vallius, T., and Svirko, Y. 2005. “Giant Optical Activity in Quasi Two-Dimensional Planar Nanostructures.” Phys. Rev. Lett. 95: 227401.
26
Artificial Chiral Nanostructure at Oblique Incidence
[13] Gansel, J. K., Thiel, M., Rill, M. S., Decker, M., Bade, K., Saile, V., von Freymann, G., Linden, S., and Wegener, M. 2009. “Gold Helix Photonic Metamaterial as Broadband Circular Polarizer.” Science 305: 1513. [14] Gautier, C., and Burgi, T. J. 2006. “Chiral N-Isobutyryl-Cysteine Protected Gold Nanoparticles: Preparation, Size Selection, and Optical Activity in the UV-VIS and Infrared.” Am. Chem. Soc. 128: 11079. [15] Kitaev, V. J. 2008. “Chiral Nanoscale Building Blocks—From Understanding to Applications.” Mater. Chem. 18: 4745. [16] Xia, Y., Zhou, Y. L., and Tang, Z. 2011. “Chiral Inorganic Nanoparticles: Origin, Optical Properties and Bioapplications.” Nanoscale 3: 1374. [17] Govorov, A. O., Gun’ko, Y. K., Slocik, J. M., Gerard, V. A., Fan, Z., and Naik, R. R. J. 2011. “Chiral Nanoparticle Assemblies: Circular Dichroism, Plasmonic Interactions, and Exciton Effects.” Mater Chem. 21: 169806. [18] Gérard, V. A., Gun’ko, Y. K., Defrancq, E., and Govorov, A. O. 2011. “Plasmon-Induced CD Response of Oligonucleotide-Conjugated Metal Nanoparticles.” Chem.
Commun. 47: 7383. [19] Abdulrahman, N. A., Fan, Z., Tonooka, T., Kelly, S. M., Gadegaard, N., Hendry, E., Govorov, A. O., and Kadodwala, M. 2012. “Induced Chirality through Electromagnetic Coupling between Chiral Molecular Layers and Plasmonic Nanostructures.” Nano Lett. 12: 977. [20] Plum, E. 2010. “Chirality and Metmaterials.” PhD thesis, University of Southampton. [21] Plum, E., Fedotov, V. A., and Zheludev, N. I. 2009. “Extrinsic Electromagnetic Chirality in Metamaterials.” Journal of Optics A 11: 074009. [22] Plum, E., Fedotov, V. A., and Zheludev, N. I. 2009. “Planar Metamaterial with Transmission and Reflection that Depend on the Direction of Incidence.” Appl. Phys. Lett. 94: 131901. [23] Stanley, P. B., De Waele, R., Albert, P., and Harry, A. A. 2010. “A Single-Layer Wide-Angle Negative-Index Metamaterial at Visible Frequencies.” Nature Material 9: 407. [24] Iwanaga, M. 2010. “Subwavelength Orthogonal Polarization Rotator.” Opt. Lett. 35: 109.
D
Journal of Electrical Engineering 5 (2017) 27-34 doi: 10.17265/2328-2223/2017.01.004
DAVID
PUBLISHING
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses Robson Borges Rodrigues, Rogério Valentim Gelamo and Anderson Barbosa Lima Federal University of Triângulo Mineiro-UFTM, Institute of Technological and Exact Sciences-ICTE, Thin Film and Plasma Process Laboratory, Av. Dr Randolfo Borges Junior 1250, CEP 38064-200, Uberaba, MG, Brazil Abstract: The development of new fabrication techniques for capacitors with high storage capabilities, called super capacitors, requires appropriated equipment in order to obtain the device’s electric behaviours. There is several equipment to perform this analysis operating with alternating or continuum voltage. However, the elevated cost of this equipment makes purchasing it impossible in many laboratories. In this work, we present the development and construction of a low-cost impedance spectrometer that allows for the analysis of the capacitor’s electric behaviour without taking too much time. The analysis is performed by alternating voltage and current measurements as a function of the frequency in the range of 0.001 Hz to 100 kHz. The capacitance and electric behaviour of some commercial capacitors are shown in this work, thereby proving the efficiency of the developed equipment. Key words: Impedance spectrometry, capacitance, supercapacitor.
1. Introduction The study and application of capacitors with high capacitance has been growing rapidly, and a lot of work has been applied in this area. The principal applications of these devices, which are also labelled as super capacitors, are focussed on electric vehicles [1], energy storage and battery substitution [2] and other power supplies [3]. Capacitors are categorised as electrostatic, electrolytic and electrochemical [4]. Since the great increase in nanotechnology research, especially in carbon nanostructures as carbon nanotubes and graphene, a large quantity of works have been published in the literature that involve obtaining electrochemical capacitors presenting major capacitance [5-9]. Supercapacitors or ultracapacitors are general names for electrochemical capacitors [4], which are in great part constructed using the carbon nanostructures above cited [10] combined with transition metal oxides [11] or other nanoparticles. In order to develop and construct super capacitors, Corresponding author: Rogério Valentim Gelamo, Dr., Mr., research fields: thin films, plasma process and nanotechnology.
electrodes using soft materials as cited above can be introduced in electrochemical cells using regular liquid electrolytes [12, 4] or a structure consisting of gel electrolyte [13]. In general, measuring the capacitance is performed using conventional potentiostats to obtain the charge and discharge curves [14]. However, in many laboratories, it is not possible to acquire this expensive equipment just to characterize prototype capacitors. An alternative way to obtain the capacitance behaviour and values is the impedance spectrometry method. In this technique, a measurement of the capacitive reactance behaviour as a function of frequency is performed, resulting in important circuit information. It is possible to obtain the circuit intrinsic resistance and the capacitance during the analysis, as they are important parameters used to characterize the capacitor. In this way, it is desirable to construct robust, precise and low-cost impedance spectroscopy equipment that is useful for characterising commercial and prototype capacitors. The possibility of obtaining a custom-designed impedance spectrometry presenting
28
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses
the complete block diagram, components and other parts of the project is presented herein, thereby allowing researchers with basic electronic knowledge to construct similar equipment to be used in capacitance behaviour analyses as a function of the frequency. The final cost of this work is small compared to the large range of possibilities the equipment offers.
2. Materials and Methods 2.1 Theory Capacitors are devices capable of storing electrical charges by using the attraction forces between two conduction electrodes separated by a dielectric material [15]. The capacitor characteristics can be obtained using continuous or alternating current. Besides this, other important parameters necessary in capacitor studies are needed to get the capacitance, including modelling it and obtaining its resistive and inductive components [16]. As the impedance characteristic is an important experimental parameter in a capacitor project and analysis, the use of alternating voltage during the measurements is necessary. In order to determine the capacitance using the alternating voltage, it is necessary to know the capacitive reactance and the sine frequency applied to the capacitor, as noted in Eq. (1) [17],
indirect and made by the voltage drop in the resistor with a known value in Ohms. The current in the circuit (Fig. 1) is determined using Ohm’s Law [17]. The resistor is used as a reference in the current calculation because both current and voltage are in phase in this component; thus (3) where R is the reference resistor () and it is possible to determine the potential parasitic resistance in the capacitor using the angular difference between the capacitor and resistor. The instant drop voltage on the resistor R in the circuit (Fig. 1) is obtained using Eq. (4) [18]: cos
Here, is the angular displacement, 2 f is the sine wave (rad) and t is the time measurement in seconds. The drop voltage on the capacitor can be estimated using Eq. (5) [18] considering the angular displacement delayed by 90o. sen
cos
(5)
Here, vC is the instant voltage on the capacitor (V) and q is the electric charge in Coulombs (C). The total instant voltage applied to the circuit is obtained by using the algebraic sum of the Eqs. (4) and (5) in order to get Eq. (6).
(1)
I sen
where C is the capacitance in Farad (F), f is the sine frequency applied to the capacitor in Hertz (Hz) and XC is the capacitor reactance in Ohms (). The capacitive reactance is determined by Eq. (2) [17]. In this way, the capacitive reactance can be calculated using the voltage (RMS—Root Mean Square), current (RMS) and sine frequency. (2) In order to measure the sine current, the circuit (Fig. 1) in which the capacitor and resistor in the series are considered, is used. The current measurement is
(4)
Fig. 1 AC test circuit used.
(6)
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses
The delayed angle between the capacitor and resistor voltage is 90o for the ideal components. However if there is some parasitic resistance in the capacitor component, the angular analysis of the two voltages, vR and vC can be used to obtain it. The delayed angle between the components can be detected by measuring the voltage in different circuit elements using a sine voltage of a different frequency in a specific range. In this manner, it is possible to obtain the capacitor behaviour in the selected range frequencies. The analysis of the RC circuit using frequency scan allows for the obtainment of the real and imaginary components of the unknown impedance in the same graph. Considering that the unknown impedance is composed of the capacitor and parasitic resistance—EPR (Equivalent Parallel Resistor) and ESR (Equivalent Serial Resistor)—association, it is possible to determine the real, resistive and imaginary capacitor components [18]. 2.2 Method To get the capacitance, our equipment analyses the voltage upon the capacitor and reference resistor. Both instant values are read and processed first to determine the total voltage applied over the circuit (Fig. 1) using Eq. (6). The next step is to determine the current in the circuit. However, as the values are instantaneous, it is necessary to obtain the RMS values using Eq. (7) [16]. ∑
(7)
Using the resistive component, it is possible to get the circuit current (voltage and current in phase) with Eq. (3). Thus, the unknown impedance ZX is found with: (8) By applying the parallelogram law (Eq. (9)) between the three voltages, it is possible to obtain the delayed angle between the resistor and capacitor voltage: cos
(9)
29
For a 90o angle, an ideal capacitor is detected. In this case, the impedance ZX is the capacitive reactance XC, resulting in a capacitance value by Eq. (1). The observation of angles lower than 90o indicates the presence of series, parallel or mixed equivalent resistance. In this case, only calculate the imaginary part of the association using the total impedance projection upon the y-axis, as shown in Eq. (10) [17]. The result obtained, XC, is the capacitive reactance and provides the capacitance value in Eq. (1). sin
(10)
For all analyses, it will be necessary to know the capacitor impedance and the angular difference between the voltage obtained over the capacitor and the reference resistor. This procedure is repeated for all frequencies applied to the test circuit. 2.3 Equipment Project and Construction The equipment herein presented consists of the sine wave generator, which applies a variable frequency based on a DDS (Direct Digital Synthesizer) chip. The generated sine wave is applied to the tested capacitor and mounted in series with a precision resistor reference that has a selectable value. The wave frequency applied to the circuit can vary from 1 mHz to 100 kHz, and the reference resistor can be selected for values of 1 Ω, 10 Ω, 100 Ω, 1 kΩ, 10 kΩ and 100 kΩ. All resistors are precision resistors. The resistance value can be modified depending on the tested capacitor. The capacitor voltage, VZx, and resistor voltage, VR, are taken by a microcontroller. The microcontroller converts the analogic signal into a digital signal using an internal AD (analogic-digital) converter of 10 bits and a sampling rate up to 200 kS/s. The digital signal is then transmitted to a personal computer by USB. The sampling sine waves received by the program are analysed, and in this manner, the capacitor’s electric behaviour is determined to be like the reactive capacitance and the capacitance as a function of frequency. Fig. 2 shows the equipment block diagram.
30
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses
Fig. 2 Block diagram used to project the impedance spectrometry equipment.
The main elements of the acquisition board are: Microcontroller, PIC24FJ64GA004; Sine wave generator, DDS AD9852; Signal conditioner (operational amplifiers); Switch reference resistors; Communication interface. Since the sine wave generator, AD9852, provides a displaced signal in they-axis (voltage) and displays only positive values, it is necessary to use signal conditioners to better adjust the sine wave, thereby making it symmetric. Eq. (11) shows the sine function given by the DDS. 0.2 sin 0.2 (11) In Eq. (11), VO(DDS) is the DDS output voltage and operational property of these components. Eq. (12) shows the voltage output of the symmetry correction circuit: 0.14 sin (12) where Vo is the output voltage applied to the capacitor being tested. The output voltage’s nominal value is 0.1
VRMS. However, the digital analogic converter operated with a voltage range (0-3.3 V). Therefore, focussing on utilising the largest range of the AD converter device, the conditional circuit shifts the voltage to the positive side of the y-axis and amplifies the measured voltages, as showed in Eq. (13). 10 1.65 (13) Thus, the voltage applied to the AD converter, VADC, varies from 0.25 to 3.05 V, which leaves a safety margin so it does not reach the inferior and superior limit of the AD converter’s work range. As the AD converter has 10 bits of precision, the representation degree is 3 mV, to the input variation of the AD converter, that goes from 0 to 3.3 V. In this way, the precision of the equipment is 1% of the measured value. The resistance commutation is made by electromechanical relays due to its low contact resistance, and it does not introduce parasitic inductance to the circuit, which could affect the
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses
capacitor measurement. The communication interface is composed of a UART-to-USB converter device. The FT232R use was motivated by this device’s low need for external components as well as its low cost and easy configuration. In Fig. 3, photos of the equipment mounted and in operation are shown. The external dimensions are 18018080 mm. It is possible to see the main board and the power transformer inside. In the front, the operation LED indicators, the USB connector and the external test terminals (connected to the commercial capacitor) can be seen. The firmware was developed in C language, and the microcontroller works with a 32 MHz clock in order to determine the maximum sampling rate of voltage in the capacitor and resistor, which may reach up to 200 kS/s. The interface operates as a slave device waiting to perform the commands received by the program installed in the personal computer. The program, which is installed on the personal computer, controls all processes. There are laps in the user’s control. The superior laps can be used to introduce or change measurement parameters, visualization results in graphs or tables modes. Fig. 4 shows the program’s main screen. The program allows the plotting of four kinds of graphs derived from sampled voltages: Voltage Frequency; Impedance Frequency;
31
Capacitive Reactance Frequency; Capacitor and resistor voltage in Cartesian plane.
3. Results Fig. 4 shows the print screen of the Voltage Frequency graph to the 2.2 µF capacitor powered by 0.1 VRMS sine wave, a 10 Hz to 100 kHz frequency range and a 100 Ω reference precision resistor. The intersection point between the capacitor and resistor’s voltage curves is used as a reference to calculate the capacitive reactance, and consequently, the capacitance. The equipment test was planned and executed using commercial capacitors. Five different capacitors were measured five times each. The capacitors herein tested were: ceramic capacitor 200 nF (±20%), film capacitor 2.2 µF (±5%), and electrolytic capacitors 235 µF (±20%), 1,100 µF (±20%) and 2,200 µF (±20%). These capacitors were purchased in local electronic shops. The obtained results are shown in Table 1. In Table 2, there is a comparison between the permissible values according to the data given by the capacitor’s manufacturer, with the average obtained through the measurement using the impedance spectrometer herein proposed. It can be seen in Table 2 that the values measured and informed by the equipment are inside the permissible values given by the capacitor’s manufacturer, thereby making the equipment viable to use to measure capacitance. How the capacitance specific
Fig. 3 Illustrative photos of the front (left) and internal (right) part of the impedance spectrometry.
32
Deve elopment and d Implementattion of an Imp pedance Spe ectrometry De evice for Cap pacitance Ana alyses
Fig. 4 Print screen of the equipment e resu ult screens (Vooltage Frequeency Plot). In th he top flap theere are any other possibilitiess of analysis. In n the graph, th he voltage as a function of freequency for th he capacitor (reed), resistor (yyellow) and sou urce (blue) aree showed. Table 1 Capacitor 200 nF 2.2 µF 235 µF 1,100 µF 2,200 µF
Cap pacitances obtaained by the im mpedance specctrometry equiipment for com mmercial capaccitors. 1 173 nF 2.176 µF F 212.1 µF F 917.8 µF F 1,843 µF F
2 171 nF n 2.1622 µF 212.00 µF 917.33 µF 1,8411 µF
Procedure 3 1 nF 172 2 2.165 µF 2 211.9 µF 9 918.2 µF 1 1,840 µF
4 175 nF 2.173 µF 211.5 µF 917.6 µF 1,841 µF
5 172 nF F 2.171 µ µF 211.8 µ µF 916.9 µ µF 1,842 µ µF
Note: The erroor in the Averagge Capacitance was calculatedd from statisticaal and instrumenntal deviation.
Av verage 173 3 ± 2 nF 2.1 17 ± 0.02 µF 212 2 ± 2 µF 918 ± 9 µF 1,8 841 ± 19 µF
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses
Table 2
33
Comparison between capacitances (measured and nominal values) for commercial capacitors herein tested.
Capacitor
Tolerance
200 nF 2.2 µF 235 µF 1,100 µF 2,200 µF
±20% ±5% ±20% ±20% ±20%
Minimum 160 nF 2.09 µF 188 µF 880 µF 1,760 µF
Permissible values Maximum 240 nF 2.31 µF 282 µF 1,320 µF 2,640 µF
is an important factor to study in super capacitor development. Normally, a capacitance of 1 to 100 F is obtained for these new devices. The equipment herein proposed is an interesting and cheap alternative to be used for super capacitor characterization. Besides, our equipment, as already discussed, can be used to extract and evaluate super capacitor behaviors in future works.
focused on the super capacitor’s measurement using functionalized nanomaterials such as graphene, organic
[1] [2]
[4]
[5]
[6]
[7]
[8]
[9]
[10] [11]
conducting film and various oxides and other composites.
[12]
Acknowledgements The authors thank the National Counsel of Technological and Scientific Development (Conselho Nacional de Desenvolvimento Científico e Tecnológico—CNPq), CAPES and FAPEMIG for the
173 ± 2 nF 2.17 ± 0.02 µF 212 ± 2 µF 918 ± 9 µF 1,841 ± 19 µF
-13.5% -1.4% -9.8% -16.6% -16.3%
References
4. Conclusions
The equipment will be used in future research
Deviation
financial support.
[3]
In this project, it is shown that the equipment developed to measure capacitance through impedance spectrometry is viable for measuring commercial capacitors. The impedance spectrometry herein described was used successfully to analyse commercial capacitors in1 mHz to 100 kHz frequency range. It is worth repeating that the measurements are made in minutes, faster than other equipment used to do the similar analysis. All results exhibited in this work are within the specified device tolerance. Other information about the electrical properties of the RC circuits can be extracted with the developed equipment; for example, the value of the resistors associated with the capacitor, in series or parallel.
Measured value
[13]
[14]
Winter, M. et al. 2004. “What Are Batteries, Fuel Cells, and Supercapacitors?” Chem. Rev. 104 (10): 4245-70. Chen, T. et al. 2014. “Flexible supercapacitors Based on Carbon Nanomaterials.” Journal of Materials Chemistry A 28. Simon, P., and Gogotsi, Y. 2008. “Materials for Electrochemical Capacitors.” Nature Materials 7: 845-54. Sharma, P., and Bhatti, T. S. 2010. “A Review on Electrochemical Double-Layer Capacitors.” Elselvier, Energy Conversion and Management July: 2901-12. Zhou, W. et al. 2014. “Flexible Wire-Like All-Carbon Supercapacitors Based on Porous Core-Shell Carbon Fibers.” J. Mater. Chem. A: 7250-5. Chen, T., and Dai, L. 2014. “Flexible Supercapacitors Based on Carbon Nanomaterials.” J. Mater. Chem. A 2: 10756-75. Meng, C. et al. 2010. “Highly Flexible and All-Solid Paperlike Polymer Supercapacitors.” NanoLetters 10: 4025-31. Kim, T. et al. 2012. “Large-Scale Graphene Micropatterns via Self-Assembly-Mediated Process for Flexible Device Application.” NanoLetters 12: 743-8. Huang, Y. et al. 2012. “An Overview of the Applications of Graphene-Based Materials in Supercapacitors.” Small 12: 1805-34. Hao, L. et al. 2013. “Carbonaceous Electrode Materials for Supercapacitors.” Advanced Materials: 3899-904. Sekhar, C. et al. 2015. “Electrodeposition of Spinel MnCo2O4 Nanosheets for Supercapacitor Applications.” Nanotechnology, IOPscience: 1-13. Wang, H. et al. 2010. “Effect of Graphene Oxide on the Properties of Its Composite with Polyaniline.” Applied Materials & Interfaces 2 (3): 821-8. Liu, L. et al. 2014. “Nanostructured Graphene Composite Papers for Highly Flexible and Foldable Supercapacitors.” Advanced Materials: 4855-62. Kumar, R. et al. 2015. “Microwave-Assisted Synthesis and Deposition of a Thin ZnO Layer on
34
Development and Implementation of an Impedance Spectrometry Device for Capacitance Analyses
Microwave-Exfoliated Graphene: Optical and Electrochemical Evaluations.” RSC Adv. 5: 67988-95. [15] Villate, J. 2014. “Eletricidade, Magnetismo e Circuitos.” Faculdade de Engenharia–Universidade do Porto–Janeiro/2014. ISBN: 978-972-99396-2-4. [16] Attes, M. 2010. “Review Study of Eletrochemical Impedance Spectroscopy and Equiavalent Electrical Circuit of Conducting Polymers on Carbon Surfaces.”
Elsevier–Progress in Organic Coatings: 1-10. [17] Halliday, D. 2009. “Fundamentos de Física, volume 3/ Halliday/Resnick, Jearl Walker; tradução e revisão técnica Ronaldo Sérgio de Biasi.” Rio de Janeiro: LTC. ISBN: 978-85-216-1607-8. [18] Chinaglia, D. L. et al. 2008. “Impedance Spectroscopy Used in a Teaching Lab.” Revista Brasileira de Ensino de Física 30 (4): 4504.
D
Journal of Electrical Engineering 5 (2017) 35-46 doi: 10.17265/2328-2223/2017.01.005
DAVID
PUBLISHING
Open Source Tool for Networks Management Communication Nuno Tiago Louro Simões1 and Carlos Manuel da Silva Rabadão2 1. School of Technology and Management, Polytechnic Institute of Leiria, Leiria, Portugal 2. Research Center for Informatics and Communications, Polytechnic Institute of Leiria, Leiria, Portugal Abstract: Considering the complexity of the networks and the need for telecommunication operators (Telco) to present innovations to their clients, the quickest possible, one of the solutions for this complexity could be to centralize its configuration. Thus the SDN (software-defined networking) concept may be an important solution. This paper suggests the implementation of a tool to support the development and testing of networks and services before they are put into production. The use of a tool that simplifies the configuration of a network service makes the networks and services to be less susceptible to errors and failures by those who set them up, thus allowing telecom operators, among others, to be able to create new services, improve the monitorization of their human resources and, above all, improve their financial results. In the end, success will be achieved because with a simple interaction and basic knowledge we are able to manage network services. Key words: SDN, network services, network programming, NSO.
1. Introduction The number of electronic devices with Internet access has been increasing in recent years [1]. Nowadays, it is even possible to have Internet access with a simple watch. With the appearance of these devices along with the advances in IT (information technology), telecom operators need to introduce new features to capture the customer’s attention. The time-to-market’s factor is also very important. The companies want to present novelties the quickest way possible. One of these innovations could be the creation of new services in the network. One of the problems that the creation of new services currently faces is the congestion that the network has. This makes the configuration of networks complex and increases the difficulty in creating new services. Nevertheless, operators have been able to manage both the network and the services, but it is natural that they are susceptible to failure by those who manage and Corresponding authors: Nuno Tiago Louro Simões, M.Sc., research field: informatics. Carlos Manuel da Silva Rabadão, Ph.D., research fields: informatics, telecommunications and electronic.
implement them. This process is typically done by a human. Most failures stem from several factors, including pressure caused by the need to put new services quickly on the market or by the routine repetition of processes that limit the potential of the network [2]. We can hardly develop a perfect software immune to failures and errors, but there are methods that can be used to try to prevent them, for example, the use of scripts. Scripts allow us to automate some tasks. As these scripts are developed by humans, they will be susceptible to failures and errors, also, even if they are unintentional. Taking into account the foregoing considerations, the scientific community has been looking for new approaches that can help to reduce limitations. This area is explained in the next sections. Considering the increasing number of people using devices with internet access and the consequent increase of the network complexity, we are motivated to develop an application to help in the service and network management so that it can be innovated and improved. The aim of this paper is to present the development of a
Open Sourc ce Tool for Ne etworks Mana agement Com mmunication
36
tool, based on the conceept of SDN (software-def ( fined networking)), which allow ws the testing of a networkk and the implem mentation off services before b they are produced. Concerninng the managgement of serrvices, one off the approaches associated a to it is the SDN N concept. SD DN is the basis off this work, which will be b introduced in Section 2. In this sectionn we will preesent some SDN S solutions existing in the market, m as weell as some off the technologiess used. In Seection 3, we will presentt the proposed arrchitecture thhat supports this work. The architecture contributes to t the mitigation of previoously presented prroblems. In Section S 4, wee will explainn the implementattion of our proposal. p Finnally, in the last and section, wee will preesent the conclusions c suggestions to work.
2. Softwarre-Defined Networkin ng This sectiion initially presents p som me concepts for f a better underrstanding off the article. After, we will introduce soome commerccial SDN soluutions that exiist in the market and some technologiees used for the implementattion of the toool created. 2.1 Background Bearing inn mind the evvolution of neetworks, theree has been an initiial divergencee between network compaanies which defended the viirtualization and those who produced eqquipment. As time passed,, there has beeen a convergencee of two tendencies: Telco Netw work Evolution annd Telco IT Evolution, E as it i can be obserrved in Fig. 1 [3].
Fig. 1
Evolu ution of SDN/N NFV, accordingg to Telco.
Within W the toppic of program mmable netw works, a mainn solu ution has com me up, with the name off SDN and a “tw win” solutionn [4] calleed Network k Functionss Virttualization. According A to the Open Neetworking Fou undation, thee SDN N is the physical separatioon of the conttrol plane andd the forwarding plane of the network [5]]. With SDN N con ncept, the netw works will bee configured and a managedd in a centralized way w [6], faciliitating the dev velopment off new w standards annd services. T The SDN conccept emergedd at th he same timee as other techhnological so olutions, from m whiich the need motivated m by ccomplexity in n the networkk arisses. These needs n combiined with th he fact thatt opeerators need to t put more sservices in th he market, ass soon as possiblee, turn the prrocess more complex andd morre likely to faail. The T purpose of o SDN is to make the maanagement off the network easier e and transform the t networkk prog grammable [77]. Thus, it sim mplifies the understanding u g of th he network, which w means that operators can do theirr job more quicckly and eaasily, accord ding to thee timee-to-market’ss factor. Connsequently, the t operatorss may y have good financial f proffits, which is an a advantage.. Before B presennting some SDN solutio ons, we cann observe, on Fig. 2, a generic scheme of SD DN. As A it can be noticed, n SDN can be divided in 3 parts:: App plication Plaane, Control Plane and Data Plane.. Nex xt each part iss going to be resumed [8]::
Fig.. 2
Generic sccheme of SDN//NFV.
Open Source Tool for Networks Management Communication
Application plane: in this plane we can refer some net apps such as, for instance, orchestration applications. These applications will communicate with the network and take care of its performance; Control Plane: the aim of this plane is to implement all the coordination protocols needed to the good functioning of Data Plane; Data Plane: in this plane the packages headings are analyzed and the packages received are sent to their final destination. This separation makes it possible to diminish the complexity, increasing the intelligence and turning the network more programmable, dynamic and efficient. It also enables the applications to deal with a single network device, not having to worry with further functioning details [9]. In order to connect the Control Plane to the Data Plane, there is a communication protocol directly attached to SDN architecture and that bounds the two functions. In most cases, this communication protocol is OpenFlow. The three main reasons to use SDN domains are [9]: Scalability: possibility of adding controls in the network, as it is getting wider; Privacy: using several privacy policies in different SDN domains; Incremental development: possibility of separating the network in sections, thus, having the chance to create a new tests network that does not disturb the main/production network. Now we will present some of the existing SDN solutions: VSC (virtualized services controller), by the internal company of Alcatel-Lucent, the Nuage networks [10, 11], NCS (network control system) [12] by Tail-f, currently owned by Cisco portfolio, and NSX by VMware. 2.2 SDN Solutions In this subsection we will make a brief analysis of each SDN solution studied.
37
2.2.1 VSC (Virtualized Services Controller) VSC, based on Alcatel-Lucent Service Router OS [13], is the SDN solution control panel of Nuage Networks and the most powerful SDN controller in the industry [11, 14]. VSC works in similar way to the network control plane for the data center, because it has a complete view of the network and its services. VSC automatically discovers network parameters, whatever type they are: Layer 2 (switching), Layer 3 (routing), QoS (quality of service) or security rules. In the VSC, the connection between the controller and the network routing is established through the communication protocol—OpenFlow [15]. This protocol allows the communication between the service controller and the network layer where it should find the hardware, i.e., the hypervisor and vSwitch [16]. 2.2.2 NCS (Network Control System) The NCS is the solution to control the network established by Tail-f. Later Cisco acquired Tail-f Company and the name of the SDN solution set was changed to “NSO (Cisco Network Service Orchestrator) enabled by Tail-f” [12]. The NSO is nothing more than a transparent layer, or interface, for those who configure the network. The NSO was meant to facilitate the creation and configuration of network services [17]. This solution is independent of brands and network equipment manufacturers, whether it is real or virtual. This SDN solution can be used to interact with both users/network administrators as well as with management applications that are already used in a network. To sum up, all SDN solutions up to now are more or less similar. They are all composed by three parts: implementation, monitoring and infrastructure/network equipment. This structure is more or less predictable given the SDN architecture. 2.2.3 VMware NSX Even though in its site [18] there is not any reference to SDN, the association of NSX to SDN is consensual in several sites on the internet [19-23].
38
Open Source Tool for Networks Management Communication
NSX solution of VMware is a safe platform of network virtualization specific to data centers or SDDC (Software-Defined Data Centre)1, and it has appeared after the acquisition of Nicira Company by VMware, Inc. [23]. Just like in any other SDN solutions, the creation of NSX has emerged due to the complexity in which the networks have turned and, according to the introductory video NSX 1 , the virtualization of equipment in the network makes the configuration time shorter. In this solution, the network management is done through some applications and, in order not to make any physical changes in data centers, the best procedure is to put a software layer on top of the existing hardware. In case of any failures in the network, the mistakes presented will be detailed and concise, so that they can help the people responsible in a faster and easier way. The low OpEx and CapEx, the time-to-market and the network security are some of the advantages of NSX usage2.
easily used to read and write data. XML is adopted in many areas of information technology, including networks. It can be dynamic and it has similarities to the HTML (Hypertext Markup Language). We can consider that the construction of XML is done by blocks which are identified by tags [25].
2.3 Used Technologies
implemented both on the devices of the network
2.3.3 NETCONF The NETCONF is generically used to make the management of network devices configuration and it is based on the encoding in XML [26]. This protocol defines basic operations that are equivalent to commands
to
be
executed
from
the
CLI
(Command-Line Interface). As in XML, NETCONF also uses tags. One of the manufacturers that uses NETCONF on its devices is Juniper Networks [27]. 2.3.4 OpenFlow OpenFlow is a communication protocol that enables its users to develop and test services. It allows direct access and manipulation of the network devices conveyance plan, such as switches and routers, being them
physical
or
virtual.
The
OpenFlow
is
infrastructure and on the SDN software control. This subsection will refer briefly to some technologies used or associated with the development of the proposed solution and also related to SDN. These technologies are: YANG, XML (eXtensible Markup Language), NETCONF (Network Configuration Protocol), OpenFlow and OpenStack. 2.3.1 YANG The YANG is a data modeling language used for a data state configuration model. This language is used by the network configuration protocol—NETCONF—and is published in the RFC (request for comments) 6020 of September 2010. The YANG is related to the content and operations in layers of NETCONF [24]. 2.3.2 XML The XML is used to describe data. This shape can be
2.3.5 OpenStack OpenStack is an operating system cloud that makes it possible to control large quantities of computers, storage and network resources through a data center. This control is made through a dashboard presented on a web interface. In the next section, the architecture used on the suggested solution will be presented.
3. Architecture Proposal In order to frame the solution/tool to propose, first we must present a logical structure of the SDN and after we will present the generic architecture of the solution developed. The logical structure of the SDN, based on the same technology architecture, has three main layers,
1
NSX: http://www.vmware.com/products/nsx/features.html. 2 NSX Overview http://bcove.me/74djrhqn.
Features
displayed in Fig. 3 that are: Application Plane, Control Plane and Data Plane.
Open Sourc ce Tool for Ne etworks Mana agement Com mmunication
Fig. 3
Logiccal structure off SDN.
If we anallyze, this logiical structure is very similaar to the one preseented by Willliam Stallingss on his articlee [9]. Next we willl explain eachh layer mentiioned above: Applicaation Plane: it can refer to t some net apps a such as orchestratioon applicattions, busiiness applications and SDN applications; Controll Plane: itt aims to implement all coordinationn protocols thhat are necessaary for the proper functioning of the Data Plane; P Data Plane: P it serves to analysee the headerrs of incoming paackets and foorward these packets to their t final destinnation, depennding on the t routing and switching taables. After pressenting generrically the SD DN architecturre, it is time to prresent an apprroach to SDN N, more dediccated to network managementt, adopted too implement this work. The arrchitecture shhown in Fig. 4 is quite sim mple, as it is dividded into threee layers: user, orchestratioon of the network and, finally, the network itself.
Fig. 4
Generic architecturre implementattion performed d.
399
The T architectuure consists oof three layeers, describedd belo ow: Managemennt Applicatioon or User: this t layer, ass the name impliees, is where thhe user, who o will interactt with h the networkk, has the prrimary role an nd where wee thin nk he will speend most of thhe time; Network Seervice Orchesstration: this is i the “smart”” layeer of the preesented archiitecture. In th his layer thee entiire process will w be unfoldded. The Netw work Servicee Orcchestration will w interprett the user’ss input andd tran nsform it so that t it can bee applied to the network,, whiich is the nexxt and last layyer to be preseented; Network devices: this llast layer is the physicall infrrastructure off the networkk. It is comp posed by thee coree and the acccess network, where it inteends to applyy the settings forr network m management and for thee creaation of services. After A presentting the genneric architeccture of thee solu ution implem mented, we wiill make a deeper analysiss of the t same. 3.1 Architecturee Used in the IImplementatiion A more detaailed architeecture propo osed for thee dev velopment of this work is sshown in Fig. 5. In n this figure we can obseerve that from m the startingg poin nt (Network Engineer orr User) to th he end pointt (Neetwork Topollogy), the usser only inteeracts with a Web bUI to configgure the netwoork mode as required. r Thee Web bUI is the point we have recreeated, beingg morre intuitive, specific andd simpler to o use, whichh is so omething new w, compared to the existiing tool. Thee
Fig.. 5
Architectu ure used in thee proposal.
40
Open Source Tool for Networks Management Communication
novelty consists in the communication between the NSO and a web interface, as it is made through the Network-wide CLI and, as we can observe in Fig. 5, this communication can be bidirectional. The necessary mechanisms to convert the high-level user-made settings must be previously configured and implemented, allowing users with low technical level to proceed with the configuration of the network and services. Then the form communicates with the Network Service Orchestrator through the implementation made in back-end of WebUI and in command line. Note that this process is abstract to the final user. Some important steps to gibe on the application of this architecture are: Filling the NSO interface: after the user fills the NSO application form and confirm this procedure, the interface communicates with NSO. The implemented interface verifies some basic data such as the validation of IPv4; Communicating with NSO: the interface communicates with NSO, sending it the data received by the interface and, consequently, introduced by the user. All the system intelligent process is in the NSO. It is in NSO that all the data to send are made and it is, also, the Network Service Orchestrator that sends the information into the network. This means, in this step the configurations should already be outlined and properly configured, and converted if it is necessary, to be executed and interpreted by the network equipment, such as the routers. It is in the stage of communication between the NSO and the network that the entire process for the correct operation is taken. The NSO is divided into four parts (three layers and a part relating to data storage) [17]: Service Manager: this is where the intelligence of the NSO tool is. This layer enables the operator to manage high-level aspects of the network that are not supported by the directly connected devices. The services should be defined, and implemented, previously. It is from here that the management
(creation, editing or deletion) of network services will be made; Device Manager: its function is to manage the configuration of transactional devices, supporting the synchronization feature of bi-directionally settings and refined changes in real time; CDB (Configuration Database): it is here that the information on the device configurations is all stored, so there is data synchronization. It is in the CDB that the synchronization, consistency and reconciliation, with respect to the configuration between the services and devices, occurs; NED (Network Element Drivers): they are responsible for the link between the NSO and network devices. The NED uses the concept of atomicity, i.e., the execution of a command is either correct and runs, or if a simple thing is wrong, nothing will be executed. The NSO, according to the device we want to configure, informs the device type (device-type) of what to do, independently of the brand/device manufacturer. The device interface is modeled on files, using the YANG, and each file is modeled with the controls—that can be updated—in the respective device. The philosophy of the NED varies from device to device. For Cisco and Alcatel, commands are converted to CLI to run on the device terminal. For the Juniper equipment, that already uses NETCONF-based encoding in XML, the philosophy is different, i.e., not needing to convert settings. As it was said before, the communication between NSO and the devices should be done by OpenFlow, NETCONF, XML, CLI or any other. If we do a deeper analysis of the communication, we will notice that the communication between the NSO and the network equipments is the responsibility of the NED or the OpenFlow controllers, as we can see in Ref. [28]. Note that this communication is made by the NSO and it was not changed in the proposed tool. We finally get to the network and the devices, which may be of different brands and models. In this solution, the NSO gets to know the equipment by the SSH
Open Sourc ce Tool for Ne etworks Mana agement Com mmunication
(secure shelll) communicaation protocool. After the presentatiion of the proposed tool architecture,, we will expllain, in the neext section, hoow it is implemennted.
4. Prototype The impllementation of o this tool is based onn the architecture presented in Section 3. Inn this sectionn, we will deepenn the archhitecture useed, namely the implementattion carried out and which w ultimaately resulted in thhe presentatioon of a simplle tool that maakes the network services mannagement. 4.1 Prototyppe Implementaation As mentiooned above, our o aim is to develop an Open O Source tool where w we cann test the settiings of a netw work and its servvices. The neetwork can be b either reaal or virtual. The concept behiind the tool iss SDN. Withh this kind of tool, the entiire configuraation process is centralized and this saame configuuration does not require in-deepth knowleddge of compuuter networkss. So we can sim mplify the connfiguration and a understannd a network. Frrom a purelyy visual poiint of view, the developed toool is nothingg more than a GUI (graphhical user interfacce) or WebU UI. Next, we will explainn the process of implementinng this toool. The soluution developed iss based upon three main sttages: Scenariio/network toopology—whhere the netw work equipment iss included; Develoopment of thee intermediatte layer—a layer l that will make the connectionn between the configuratioon and netwoork equipment and whicch is transparent to t the user. The T developm ment basis wass the use of thhe platform “Cisco Network N Serrvice Orchestratorr enabled by Tail-f” T and thhis is the platfform that connectts the netwoork topology to the graphhical interface. Cisco NSO iss an orchestration technollogy that is bassed on thee SDN conncept, since the Orchestratorr Apps are part p of the Appplication Pllane, one of the laayers that beloong to SDN. This T phase wiill be the back-endd for the user;
41
Graphical User Interrface—primaary site off inteeraction betw ween the uuser and th he network.. Fro ont-end for thhe user. The T implemeentation of thhese three sttages will bee pressented in the following suubsections. 4.1.1 4 Scenarioo/Network Toopology In nitially a virtuual Linux Ubbuntu machinee was createdd to ru un the 14.04 version. In thhis machine a network wass dev veloped on a network sim mulation sofftware GNS33 [29], shown inn Fig. 6, where severral differentt man nufacturers were w set, incluuding Cisco and a Juniper. In n Cisco’s routers they used the filee “c3725-adventerrprisek9-mz.1124-25d.bin” to virtualizee the IOS. This moodel was the only one to which w we hadd access, althoughh we know thhat there are more recentt mod dels. As for Juniper, we hhad to use a vSRX OVA A (open virtual appplication) im mage, more specifically s a 12.1X47-D15.4 version of JunOS vSR RX. For thee Alccatel-Lucent equipment, w we have useed the modell “AL LCATEL SR R-OS 7750 TiM MOS-B-12.0.R6”. The T only setttings made in this equiipment weree add dressing, routiing, the OSPF F (open shortest path first)) in this case, and the ccommunication protocoll con nfiguration ussed—SSH. To T bridge thee gap betweenn the topolog gy developedd and d the GUI we used, as menntioned abovee, in the nextt subsection we wiill explain in ddetails the NS SO solution. 4.1.2 4 Developpment of the IIntermediate Layer After A the topoology and connfiguration of o the devicess is completed, c w have definned some seervices to bee we imp plemented andd tested on the network. The first objectivee
Fig.. 6 GNS S3.
Network k topology deefined to test developed in n
42
Open Source Tool for Networks Management Communication
was this (implement and test some services on the network) and next (simplify this objective, i.e., configure the services using the GUI). The services implemented were QoS, VPN (virtual private network) and a basic service of VLAN (virtual local area network), as well as the Hostname configuration of the equipment. One of the aims is to use the developed prototype to manage the referred network services. With this prototype we can, in just a few steps, configure QoS, VPN, VLAN or the hostname in a network. The hostname service would serve as proof of concept. After setting communication services, we have set up the configuration parameters of the service. To do this, we created a “skeleton service” to be implemented. In this “skeleton” there are several files, including the modeling of services, using the YANG. It is in the YANG files that the fields, or parameters, are defined to be ordered for proper implementation of the services in the network. Fig. 7 shows an example of part of a YANG file (hostname.yang) for implementing the hostname service, with the purpose of changing the hostname of the required device. This service, as mentioned previously, was created to demonstrate the implementation done and will be reflected in the tested network devices. In Fig. 7 we can see the set parameters which will support the data to be filled in the NSO. On the YANG model we can note the name of the device whose hostname we want to change, and the new hostname we want to give it. If we run the command to create the Hostname service, it works, but only on the data storage in NSO CDB. On Fig. 8 we can observe the abstraction obtained from the network when executing commands. After the change in YANG file, we must define the service mapping, so that the command is executed and the service created. As for the mapping setting, this is nothing more than changing the template (hostname.xml) that is generated when we create the service in the NSO. In Fig. 9 we present an example of Hostname service. The result may be the template
shown next. In Fig. 9 we can also note that the template already follows the hostname configuration, either to a Cisco router, identified by your operating system (IOS) or to the Juniper router, identified by your operating system (JunOS). Although it is expectable that the big companies and producers create the templates, or files, XML according to what they want. These are only good to exemplify a possible creation of a new service, so we can conclude that they facilitate the process to a great extent.
Fig. 7 YANG file for modeling a service: Hostname (hostname.yang).
Fig. 8
Abstraction in the execution of commands.
Fig. 9
Hostname service’s template (hostname.xml).
Open Sourc ce Tool for Ne etworks Mana agement Com mmunication
In Fig. 100 we present a command thhat is an exam mple of the Hostnname service configurationn and that maay be used for practical p impplementation of changinng a device’s hosstname, in thiis case, the roouter CE2. After expplaining the NSO, we will w explain the creation of the GUI prrocess that, for the netw work manager, is the only partt that will bee used for serrvice management, after the network n andd the service are created, natuurally. 4.1.3 Devvelopment Toool The finall stage resultted in the deevelopment of a graphical innterface wheere the user is expectedd to interact mosst of the tim me with regarrd to the serrvice management part. The grraphical interrface was creeated in WordPresss and is veryy simple. It is important to note that the mainn purpose waas not the impplementation of a high-level web w interfacee, but the deevelopment of o a solution thaat can serve as a stagge prior to the configuratioon of the netw work and prooduction servvice. We tried to create a simpple and functional interfacce to make its usse as easy as a possible. There are more m graphic toools with the functioon of netw work configuratioon, but most of them havee many conccepts which may not n be necesssary to those who w will mannage a network and its servvices [30]. The T Cisco NSO N technology is i not very used u yet but itt is property of a big networkk company soo it has potenttial. We havee not found any related r work with it, so too the best off our knowledge, our work is the t first of its kind. The implementation of o the WebUI UI is divided into two parts: the visible (front-end) and non-vissible (back-end), which are running the most imporrtant process. Thee front-end is very simple and it is based mainly on buttons and fillling out form ms. The backk-end is where thee data that was w previouslyy filled in byy the user forms is read. In thee back-end off the tool we have h done the proper p impleementation to t interpret and process everrything the usser sees. Thiss reading folllows the sequencee shown in Fiig. 11. In what cooncerns the daatabase, it is very v simple annd it is used mainnly to synchroonize the data to be presented
433
in the t form wiith the data on the NSO O. The mostt imp portant comm mand, througgh which thee connectionn betw ween the GU UI and terminaal NSO is maade, is shownn in Fig. F 12. Running R a scrript with thiss command iss reflected inn NSO O terminal and a later, in tthe existing network. n Thee com mmunication mode betweeen the prototype and thee NSO O was the NS SO [NCS] CL LI Scripts [17]], since it wass the simplest andd quickest waay of implem menting whatt we intended to teest. The T executionn of the comm mand on Fig. 12 1 will act onn the existing netw work, as it takkes to the exeecution of thee com mmand presennted on Fig. 113, as it can be b seen next. As A we can obsserve, the parrameters of th he applicationn, from m the appliccation form, will be replaced in thee com mmand show wn on Fig. 13. Next, on Fig. 14, wee pressent an exam mple of a sscript, so thaat it can bee exeecuted on NSO O. admin-ncs(conf a fig)# host hos stname troca device CE2 changeto CE E2Cisco ad dmin-ncs(confi ig)# commit
Fig.. 10 Examplee of Hostnamee’s command for Hostnamee serv vice creation in n NSO.
Fig.. 11 Process execution seq quence runs in back-end in n grap phic interface.
$ /home/tail l-f/ncs_new/bi in/ncs_cli -C -u admin
Fig.. 12
Access coommand termiinal of NSO.
$ nso_terminal ("config \n ho ost hostname troca t device " . $device . " changeto " . $hostname ."\n . top");
Fig.. 13
Access Command C to bee incremented on bash script..
44
Open Sourc ce Tool for Ne etworks Mana agement Com mmunication
Fig. 14 Script to change the configuraations in the NSO terminal.
Fig. 15
Hosttname form, part of the grap phic tool develooped.
Our NSO CLI Script is a solution available a by NSO N technology itself, i thus itt is a valid opption to be used. u There weree other com mmunication modes like the Python, RE EST and Javaa, dependingg on the type of solution to thhe management of networrk we have orr we intend to devvelop. To concluude the chapteer, we presennt an examplee test of the entire process carriied out. 4.2 Prototyppe Implementaation On the grraphical interfface, the NSO O checks the data after the useer fills out a form f for the hostname h chaange. The form is shown in Figg. 15. The param meters are validated after they t are inserrted. Only after their insertiions the com mmands willl be executed in the t NSO term minal, the dataa are stored inn the CDB and the mappingg definition is made. This T definition is reflected in the t template result r in the XML X file, previouusly shown in Fig. 9. Finally, F the NED N interprets the received daata. The comm mand is executed on the machine and the reesult is successsful, as show wn in Fig. 16. All netw work servicess were implemented on the prototype. We W did not develop d all teemplate serviices, because this work is expeected to be doone/developed by
Fig.. 16 Executiion of commaands sequencee in back-end.. Tra ansparent proccess for the useer.
netw work or deviice manufactturers. Althou ugh we onlyy pressent the testt for hostnam me service, for proof off con ncept of the prototype toool, the resullts of testingg serv vices will alsso be successsful in Alcateel router. Thee chaanges were coonfirmed in thhis specific ro outer. We W conclude the presentation of the imp mplementationn and d of the demonnstration of thhis tool execu ution.
5. Conclusion C n and Futurre Work We W proposed and implemeented an Open n Source tooll thatt can be used to manage a nnetwork and especially itss serv vices before they t are put iinto productio on. Using thee con ncept of SDN,, the managem ment can be done d either inn a reeal or in a virrtual network, whether it already a existss or it i is created from f scratch. Its simple usse allows thee userrs to spend less time iin the config guration andd creaation of servicces and, at thee same time, it i can be usedd to optimize o bothh the networkk and the creeation of new w serv vices. In practtice, the process is simple:: add a tool too a network n and that tool is ready to be b used. Thee con nfiguration off the equipmennt, as it is don ne nowadays,, willl be maintaineed, but it willl use a graphicc tool so that,, thiss process beccomes more ssimplistic an nd abstract too the user. The advantage oof this proto otype is thee dev velopment of a graphic inteerface which presents andd
Open Source Tool for Networks Management Communication
takes advantage of the management of network and services in an easier and more visual mode, instead of what happens in traditional networks. The presented tests fundament this advantage, since, until now, according to the recent research, there is not any tool similar to the suggested one, using the Cisco NSO solution. As future work, we can suggest the implementation of new services and the consolidation of this tool through a more optimized prototype. It would be an advantage to present this prototype to managers or network administrators, who work in this area daily, in order to improve this tool. Besides those that have already been mentioned, another future works could be: Testing the tool using a mixed scenario (with real and virtual equipment) and a scenario with real equipment; Using other similar solution to “Cisco Network Service Orchestrator enabled by Tail-f”, so that it may be possible to test the differences and verify eventual improvements between the use of this other solution and the proposed tool; Using another way to access communication between the proposed tool and the NSO, this is to say that, instead of using scrips in bash, we should use REST or Python, for instance; In case people want to keep going and to stimulate other network, another simulation tool could be used, in alternative to GNS3, to develop the scenario of tests, once the tool, with different software, could have other type of unpredictable answers or it may need other type of changes in the proposed alteration. We conclude the paper related to SDN, about using this concept to manage communication services.
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
References [14] [1] [2]
[3]
Cisco Systems, Inc. 2015. Cisco Visual Networking Index: Global Mobile Data Traffic Forecast Update, 2014-2019. HP Enterprise Business. 2014. Why SDN.Software-defined Networking? Available from https://goo.gl/kfclyH. Accessed on December 05, 2015. Altice Labs. 2015. An NFV/SDN Enabled Service
[15]
45
Provider: A New Generation of Digital Services. Altice Labs. Aveiro, Portugal, 33. Alexander, S. 2014. The Year SDN and NFV Go Mainstream. Network World, Inc. Available from http://www.networkworld.com/article/2858736/sdn/2015the-year-sdn-and-nfv-go-mainstream.html. Accessed on January 12, 2015. Open Networking Foundation. Software-Defined Networking (SDN) Definition. Open Networking Foundation. Available from https://goo.gl/hMOCuy. Accessed on January 10, 2016. Kreutz, D. et al. Software-Defined Networking: A Comprehensive Survey, October 08, 2014. Available from http://arxiv.org/pdf/1406.0440v3.pdf. Accessed on February 24, 2015. Jarraya, Y., Madi, T., and Debbabi, M. 2014. “A Survey and a Layered Taxonomy of Software-Defined Networking.” IEEE Communications Surveys & Tutorials 16 (4): 1955-80. Available from http://ieeexplore.ieee.org/document/6805151/. Accessed on December 2014. Pinote, A., and Martins, J. 2013. “Encaminhamento IP Optimizado Através de uma Aproximação de Software Defined Networking.” CRC’13—Atas da 13ª Conferência sobre Redes de Computadores. Leiria, Portugal, 109-14. Stallings, W. 2013. “Software-Defined Networks and OpenFlow.” The Internet Protocol Journal, 2-14. Available from https://www.box.com/shared/static/13xnhpmvwenlm2ahy 1yp.pdf. Accessed on October 13, 2014. Nuage Networks. Products—Nuage Networks. Available from http://www.nuagenetworks.net/products/. Accessed on December 15, 2014. Nuage Networks. Products.Virtualized Services Platform, 2014. Available from http://www.nuagenetworks.net/wp-content/uploads/2014/ 11/MKT2014097652EN_NN_VSP_Virtualized_Services _Platform_R3_Datasheet2.pdf. Accessed on December 15, 2014. Cisco Systems, Inc. 2015. Tail-F Systems. Cisco Network Service Orchestrator (NSO) Enabled by Tail-f, 2015. Available from http://goo.gl/qEGx5M. Accessed on December 22, 2015. HP Enterprise Business. 2015. Leverage SDN: Create Consumable, Programmable, and Scalable Cloud Networks, 17. Nuage Networks. 2015. Arista and Nuage Networks: Building Cloud Datacenters with OpenStack. Available from http://goo.gl/zJ4juN. Accessed on January 7, 2016. Mckeown, N. et al. 2008. “OpenFlow: Enabling Innovation in Campus Networks.” Stanford University; University of Washington; MIT; Princeton University; University of Washington, em St. Louis; University of
46
Open Source Tool for Networks Management Communication
California, Berkeley, 1. [16] Kultan, M. 2014. Nuage—Virtualized Services Platform (VSP) & Network Services (VNS). Vienna, Austria, 16. [17] Cisco Systems, Inc. Tail-f Network Control System 3.3 Getting Started Guide, San Jose, CA, USA, 1, 3, 51-2, 59. Available from http://tailf.com/wordpress/wp-content/uploads/2014/12/n cs_getting_started.pdf. Accessed on December 26, 2015. [18] VMware, Inc. NSX. VMware, Inc.—Products. Available from http://www.vmware.com/products/nsx. Accessed on January 26, 2015. [19] Banks, E. 2014. SDN Showdown: Examining the Differences between VMware’s NSX and Cisco’s ACI. Available from http://www.networkworld.com/article/2172922/sdn/sdn-s howdown--examining-the-differences-between-vmware-s -nsx-and-cisco-s-aci.html. Accessed on January 27, 2015. [20] Townsend, K. 2013. Is Cisco Fighting a Losing Battle over SDN? VirtualizedGeek. Available from http://www.virtualizedgeek.com/2013/09/is-cisco-fightin g-a-losing-battle-over-sdn/. Accessed on October 13, 2014. [21] Ferro, G. 2014. Musing: On Using Cisco ACI and VMware NSX in the Same Network. Available from http://etherealmind.com/musing-using-cisco-aci-vmwarensx-network/. Accessed on January 27, 2015. [22] Ferro, G. 2013. New SDN Technology Challenges VMware, Cisco. Network Computing. Available from http://www.networkcomputing.com/data-centers/new-sdn -technology-challenges-vmware-cisco/a/d-id/1234143.
Accessed on December 15, 2014. [23] Townsend, K. 2014. Understanding the Competition between VMware and Cisco on SDN. Available from https://www.linkedin.com/pulse/20140309231647-31940 198-understanding-the-competition-between-vmware-and -cisco-on-sdn. Accessed on January 28, 2015. [24] Tail-F. What Is YANG? YANG. Available from http://www.tail-f.com/education/what-is-yang/. Accessed on November 25, 2014. [25] Rouse, M. 2014. What Is XML (Extensible Markup Language)? TechTarget. Available from http://goo.gl/v65bZi. Accessed on January 10, 2016. [26] Enns, R. et al. 2011. RFC 6241—NETCONF Configuration Protocol. [27] Juniper Networks, Inc. 2015. Junos OS NETCONF XML Management Protocol Developer Guide, 3. [28] Jensen, J. J. 2016. Multi-Vendor Service Orchestration & Network Automation for Today’s Networks. www.cisco.com, ISSN 15, 23. Available from https://www.cisco.com/assets/global/DK/seminarer/pdfs/ Cisco_SP_Virtual_Update-Network_Service_Orchestrato r-27_januar_2016.pdf. Accessed on April 29, 2016. [29] GNS3 Technologies Inc. 2016. What Is GNS3? GNS3. Available from https://www.gns3.com/software. Accessed on February 21, 2016. [30] Vecchio, L. D. 2016. GUI for Netfloc—An OpenSource SDK for SDN. A Blog of the ZHAW Zurich University of Applied Sciences. Available from https://blog.zhaw.ch/icclab/gui-for-netfloc/. Accessed on February 2016.
D
Journal of Electrical Engineering 5 (2017) 47-56 doi: 10.17265/2328-2223/2017.01.006
DAVID
PUBLISHING
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems Malinwo E. Ayikpa, Katia C. de Almeida and Guilherme C. Danielski GSP-Labspot, Department of Electrical Engineering, Federal University of Santa Catarina 88040-900, Florianópolis, SC, Brazil Abstract: This paper presents a TOPF (three-phase optimal power flow) model that represents photovoltaic systems. The PV plant is modeled in the TOPF as active and reactive power source. Reactive power can be generated or absorbed using the available capacity and the adjustable power factor of the inverter. The reduction of unbalance voltage and losses in the distribution systems is obtained by actions of reactive power control of the inverter. The TOPF is formulated by current balance equations and the PV systems are modeled via an equivalent circuit. The primal-dual interior point method is used to obtain the optimal operating points for the systems for different scenarios of solar irradiance and temperature, thus providing a detailed view of the impact of photovoltaic distributed generation. Key words: Three-phase optimal power flow, photovoltaic generation, unbalance voltage, loss, primal-dual interior point method.
1. Introduction The connection of generation sources to distribution systems can have significant impacts that need to be studied. Among the distributed generation sources, presenting the greatest growth is PV (photovoltaic). It is estimated that in 2023 there will be approximately 161 thousand PV generation systems in Brazil, which corresponds to the insertion of 835 MWp into the grid [1]. The PV generation has intermittent features that are challenging for utilities. Unfortunately, there are still few computational tools to accurately assess the impact of distributed PV generation. One reason is the approximate representation of the PV generation and another is the use of single-phase equivalents for the distribution system. Tools based on single-phase equivalents may not provide the best operating solutions for three-phase systems, especially when circuits and/or loads are considerably unbalanced [2]. For these reasons, this work models the PV power plants in the TOPF (three-phase optimal power flow) from the PV module equivalent circuit and, with TOPF, analyzes the impact of the PV generation on the Corresponding author: Malinwo Estone Ayikpa, electrical engineer, research field: electric power systems.
distribution system. The three-phase representation of the distribution system was first made in power flow programs that use the backward/forward sweeping method to obtain system voltages [3]. However, in Ref. [4] a three-phase current injection method was proposed, which, presented better convergence properties than the conventional method. The same formulation was used later in the three-phase optimal power flow [5]. Several papers on the TOPF problem have been published in recent years. Among them can be cited [6] which proposes a solution for an unbalanced FPO via the Quasi-Newton method; [7] which considers discrete control operations such as capacitor switching and taps adjustment of OLTCs; [8], based on semidefinite programming; [9] which extends the TOPF based on current injections for optimization of n-conductors systems and, [10] which achieves optimal adjustment of capacitor banks and voltage regulators to minimize active network loss. Some papers also present studies on the impact of distributed PV generation in the system [5, 11]. In studies on steady-state operation, PV plants are often represented by active power injections of values
48
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
equal to their generation capacities. However, a more realistic view of the operating conditions of the system is obtained if the PV generation is calculated from measurements of solar irradiation and temperature. For this, the PV module can be represented by the five-parameter model [12, 13]. This representation was used in the power flow problem [14] and, more recently, in the single-phase optimal power flow problem [15]. This paper describes a TOPF model based on the formulation proposed in Ref. [5], in which the PV plants are represented by the five-parameter model. The TOPF allows the injection of reactive power by the PV plant, which reduces the voltage unbalance and loss in the distribution systems. The work is organized as follows: the next section explains how PV generation is calculated. Section 3 describes the TOPF problem used in the simulations. Section 4 analyzes the results obtained and, finally, Section 5 summarizes the main conclusions of the study.
2. Photovoltaic Generation Calculation
are known, the current, voltage and active power supplied by the module can be calculated in each scenario of temperature and solar irradiation. However, not all parameters are available, since manufacturers’ datasheet of PV panels only provide the nominal open-circuit voltage, , , the nominal short-circuit current, , voltage and current at the maximum , and , the coefficients of power point, temperature for open circuit voltage and short-circuit current, and , and the maximum power produced experimentally, , . The values are referred to STC (standard test conditions). Some manufacturers also provide I-V curves for different levels of radiation and temperature. In Ref. [13] an iterative method is proposed to obtain the equivalent circuit parameters from the information provided by the manufacturers. This method is used to calculate PV generation. 2.2 Five-Parameter and DC Power Calculation The method is based on the fact that varies with the temperature and the incident solar irradiation in the panel according to:
2.1 The Five-Parameter Model The electrical power supplied by a photovoltaic module can be obtained from the equivalent electrical circuit of Fig. 1 [12]: Applying Kirchhoff’s 1st Law to the circuit, the current injected by the module is: ⎡ ⎛ V + I Rs ⎞ ⎤ V + I Rs I = I L − I o ⎢ exp ⎜ ⎟ − 1⎥ − Rsh ⎝ Vt aˆ ⎠ ⎥⎦ ⎣⎢
∆
,
(1)
where I is the injected current, V the terminal voltage, is the current generated by the incident light, I0 is the saturation current of the diode, / is the thermal voltage of the array with cells connected in series, is the Boltzmann constant, is the cell temperature (K), q is the electron charge and is the diode ideality constant. When one has the cells array, and are the equivalent resistances. Once the five-parameters , , , and ,
where
,
(2)
is the light-generated current at nominal
conditions, G the irradiation on the surface of the array, Gn the nominal irradiation and ∆ , where T represents the measured temperature and the temperature at nominal conditions. The saturation current of the diode is obtained in order to match the open circuit voltage with experimental data obtained for different temperatures. The starting point is the nominal saturation current ,
, ,
⁄
,
Fig. 1 Equivalent circuit for photovoltaic module.
(3)
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
calculated on the thermal voltage of the connected in series, , , at the temperature .
49
cells
is obtained from Eq. (4) employing the voltage and current coefficients and and the temperature correction factor ∆ : ∆
,
(4)
∆
, ,
is determined according to the type of technology used in the solar panel. For the module used (Hanwha polycrystalline silicon), 1,3 [16]. and are calculated from the assumption that only a pair leads to the maximum power , , in the experimentally measured, max, conditions provided by the manufacturer. From Eq. (1), it follows that and must respect: 1
exp
max,
(5) Fig. 2
Algorithm to determine
.
To solve Eq. (5), is incremented from zero. is initialized to the minimum value obtained by the inclination of the straight line segment joining the points on the I-V curve defined by the short-circuit and maximum power condition: ,
,min
,
(6)
For every pair , the value of is updated using the relation between the currents of the circuit: ,
,
(7)
Fig. 2 shows how and are obtained. Having found and , , and the DC power generated can be calculated for every scenario of temperature and solar irradiation, according to the algorithm of Fig. 3. 2.3 Inverter Modeling and AC Power Calculation The PV modules are connected in series forming strings and these are connected in parallel to the inverters. The number of modules per string, , , and the number of strings, , are chosen in order to achieve a good efficiency of DC-AC conversion. The
Fig. 3 Algorithm to determine
,
and
.
inverter efficiency was calculated by means of exponential interpolation of the data indicated in the manufacturer’s datasheet for each voltage curve, with 0.99 as determination coefficient. The active AC power at the inverter output is: PPV ,inv ,ω = ηinv ,ω N PV , s N str Pω
(8)
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
50
where the efficiency of the inverter is obtained by the function that interpolates the data of the manufacturer ( , , , , ).
where,
3. Three-Phase Optimal Power Flow The TOPF problem is formulated from current injections [5]. In the problem, the active power supplied by the PV plants is not controllable. However, these power plants can generate reactive power since the inverters can operate with PF (power factors) less than 1.
is the three-phase voltage phasor of the bus k and the subscripts “Re” and “Im” indicate the real and imaginary part of the phasor. (B) Equality constraints. The current balance in a given bus k of the system is made by adding the current injections per phase of the elements connected to that bus: abc abc I gabc =0 (13) , k − Id , k − Ik
3.1 Modeling of Photovoltaic Plant in the TOPF
where
The photovoltaic power plant is connected to the grid via a transformer. Depending on the capacity of the photovoltaic plant, the connection can be single-phase or three-phase. The AC power supplied by the PV plant is: (9) , , , is the number of inverters. where If the PV plant operates with adjustable power factor within the inverter limits, its reactive generation, max , , must respect the nominal inverter capacity, and its power factor, QPV
:
2 ⎧ P ⎪ ⎛ PV ,ω ⎞ ≤ min ⎨ ⎜ ⎟ − PPV ,ω ⎪⎩ ⎝ PFinv ⎠
(
)
2
Vk , − =Vka + a 2Vkb + aVkc , Vkabc
(S
,
× N inv
) −(P ) 2
PV , ω
2
⎫ ⎪ ⎬ (10) ⎪⎭
(A) Objective function. Two performance indices of the system were considered: minimum transmission losses, F1 = min
n
3
∑∑ ( P k =1 i =1
i gk
− Pdik
)
(11)
where n is the number of bus, i the network phase index and and active power generation and load; and minimum voltage unbalance defined by the negative sequence component of all bus voltage system, F2 = min
n
∑ (V k =1
2 Re, k , −
2 + VIm, k−
)
(12)
,
,
the contributions of loads and the lines and transformers contributions connected to the phases a, b and c of this bus. Separating the real and imaginary parts of Eq. (13), the current balance equations of TOPF are obtained: abc abc abc I Re, g , k − I Re, d , k − I Re, k = 0
(14)
abc abc abc I Im, g , k − I Im, d , k − I Im, k = 0
The currents injected by the generator are expressed: ,
, ,
,
, ,
and
,
(15)
are active and reactive powers
generated. On the other hand, the currents consumed by the loads are: ,
3.2 TOPF Problem Formulation and Its Resolution
+
a = 1∠120°
abc jVIm, k
are the contributions of generators,
,
where max inv
abc = VRe, k
, ,
and
where
,
, ,
,
(16)
are active and reactive powers
consumed. The current contributions of the lines are calculated by the network equations, expressed in matrix form as: abc ⎡ I Re, ⎤ k ⎢ abc ⎥ I ⎢ Im,k ⎥ ⎢ M ⎥= ⎢ ⎥ ⎢ I Re,m ⎥ ⎢ I abc ⎥ ⎣ Im,m ⎦
⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
(
− B abc
)
t
L
−G abc
B abc
G abc
L
− B abc
−G abc
M
M
O
M
M
−G abc
B abc
L
G abc
L
(B )
G abc
(B ) abc
−B
abc
t
−G
abc
abc t
(
− B abc G
abc
)
⎤ ⎥ abc ⎥ ⎡VRe,k ⎤ abc ⎥ ⎥ ⎢VIm, k ⎥ ⎥ ⎢ (17) ⎥.⎢ M ⎥ ⎥ ⎢V abc ⎥ t ⎢ ⎥ ⎥ Re,m abc ⎥ ⎥ ⎢⎣VIm, m⎦ ⎥ ⎦
In Eq. (17), and are 3 3 matrix composed of the real and imaginary parts of the elements of the admittance matrix of the system,
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems abc abc abc abc I Re, k , I Re, k , I Im, k and I Im,m are vectors 3 × 1 and t indicates transposed matrix. The transformers are considered fixed and represented by the π-equivalent circuit [17]. In order for the voltages in the reference bus (ref) to be delayed in 120º, the following equations are imposed: a VIm, ref = 0 b b −2π ) = 0 VIm, ref − VRe, ref tan( 3 c c 2π ) = 0 − tan( VIm, V ref Re, ref 3
(18)
Finally, in order to keep the voltage magnitude of the reference bus equal in the three-phases, the following equations can be inserted in the TOPF model: 2 2 2 2 VRe, ref , a + VIm, ref , a − VRe, ref , b − VIm, ref , b = 0 2 2 2 2 VRe, ref , a + VIm, ref , a − VRe, ref , c − VIm, ref , c = 0
(19)
(C) Inequality constraints. They represent operating limits and/or security aspects of the system. For each bus k and phases a, b and c, these constraints are: 2
2
2
2
abc abc Vmin,abck ≤ VRe,abc k + VIm, k ≤ Vmax, k abc abc abc Pg min, k ≤ Pg , k ≤ Pg max, k
Q
abc g min, k
≤Q
abc g,k
≤Q
(20)
abc g max, k
At the bus k, if there is a PV plant, in Eq. (20), min, and , , with max, limits given in Eq. (10). The TOPF problem was solved by the primal-dual interior point method [18].
4. Results
considered taking into account SF220-30-1P240L panels. Such power is affected by the efficiency of the inverter, which varies from about 80% to about 97% depending on the irradiation and temperature. Thus, it changes over the days and also over the seasons. 4.2 Impact of PV Generation on the System The PV plants were formed by connecting 48 SF220-30-1P240L panels per inverter, 24 of which were connected in series ( 24 and 2). , The number of inverters was chosen according to the capacity of the plant. The studies initially suppose two three-phase PV plants of the same capacity, connected in bus 890 and 848 of the IEEE34 example and in bus 58 & 62 of example SIS70. (A) Results for a specific scenario of irradiation and temperature. The following results were obtained with the plants operating at maximum power on a summer day (02/01/2014). Table 1 indicates the TOPF solutions for the case without PV (base), with PV plants operating with a power factor unit or higher than 0.8. The voltage unbalance base case is the state unbalance of the system with the solution of minimum losses. It is observed that the insertion of the power plants: (i) reduces the losses substantially, since the loads are supplied locally; and (ii) reduces the voltage unbalance. Table 2 shows the power injected in the reference bus (substation) and the PV plants in cases of minimum Spring
Winter
The studies were performed with the IEEE34 bus system [19] and a 70-bus system (SIS70) [20]. Solar irradiation and temperature data were obtained at the INMET station in Santa Marta (SC) in January, April, July and October 2014. Data from the Hanwha SF220-30-1P240L (240Wp) panel and the SUNNY TRIPOWER 12000TL-US (12 kVA, FP ≥ 0.8) inverter were used as well. 4.1 Output Power Generation of the Inverter Fig. 4 shows the output power of the inverter on days
51
Fig. 4 Inverter output power.
Autumn
Summer
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
52
loss of the IEEE34 system. Note that in the base case, the substation supplies on average 623 kW and 127 kVAr per phase. Table 2 shows that the active power injection drops to 283 kW/phase with the PV plants operating at the power factor unit level. Reactive injection drops to 43 kVAr/phase when PV plants operate with FP ≥ 0.8. Note that the PV plants have very distinct participations in the control of reactive power of the systems.
Figs. 5 and 6 show the voltages profile of both systems. It is observed that the control of reactive power by PV plants makes it possible to operate with higher voltages and less unbalance, reducing the losses in the circuits. Table 3 indicates the power injected by the substation and the PV plants of the SIS70 system in case where minimizing unbalance between phases. In the base case, the substation injects in the system in average 900 kW and 710 kVAr per phase. With the
Table 1 Impact of PV plants on losses and voltage unbalance. Sist.
Min. losses (kW) FV FP = 1 19.72 19.77
Base
IEEE34 SIS70 Table 2
100.02 37.43
FV FP ≥ 0.8 15.86 16.48
Base 0.081 0.11
Active power (kW) and reactive power (kVar) Pgrefc Qgrefa Qgrefb 613.54 138.01 119.94 Pgrefc Qgrefa Qgrefb 272.01 91.43 76.35 PPVc QPVa QPVb 314 Pgrefc Qgrefa Qgrefb 270.70 53.31 38.52 PPVc QPVa QPVb 157 70.73 70.73 157 -34.15 -34.15
Pgrefb 615.46 Pgrefb 275.86 PPVb 314 Pgrefb 274.65 PPVb 157 157
Three-Phase Voltage in base case V (p.u)
V (p.u)
1.05
1 0
5
10
15
20 25 30 bus Three-Phase Voltage with PV, PF = 1
35
1
40
1.05
0
10
20
30
40 50 bus Three-Phase Voltage with PV, FP = 1
60
70
0
10
20
30
40 50 60 bus Three-Phase Voltage with PV, FP ~= 1
70
1.05 V (p.u)
V (p.u)
Qgrefc 122.36 Qgrefc 76.39 QPVc Qgrefc 38.50 QPVc 70.73 -34.15
Three-Phase Voltage in base case
1.05
1 0
5
10
15
20 25 30 bus Three-Phase Voltage with PV, FP ~= 1
35
1
40
1.05
1.05
1
Va 0
5
10
15
20 bus
25
Vb 30
Voltages, case of Min. losses—IEEE34.
Vc 35
V (p.u)
V (p.u)
FV FP ≥ 0.8 0.030 0.064
Power injections—Min. losses, IEEE34.
Pgrefa Base case 640.02 Pgrefa 300.01 PV Plant with/ PF = 1 PPVa 314 Pgrefa 298.77 PV Plant with/ PF ≥ PPVa 0.8 157 157
Fig. 5
Min. Unbal. (%) FV FP = 1 0.029 0.062
1
Va 0
40
Fig. 6
10
20
30
40 bus
50
Voltages, case of Min. losses—SIS70.
Vb 60
Vc 70
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
53
Table 3 Power injections—Min. Unbal., SIS70. Pgrefa Base case 1,126.7 Pgrefa 804.84 PV Plant with/ PF = 1 PPVa 320 Pgrefa 802.73 PV Plant with/ PF ≥ 0.8 PPVa 157 157
Pgrefb 898.3 Pgrefb 578.59 PPVb 320 Pgrefb 576.89 PPVb 157 157
Active power (kW) and reactive power (kVar) Pgrefc Qgrefa Qgrefb 671.4 889.50 710.21 Pgrefc Qgrefa Qgrefb 353.86 886.12 707.76 PPVc QPVa QPVb 320 Pgrefc Qgrefa Qgrefb 352.63 779 600.80 PPVc QPVa QPVb 157 47.21 47.21 157 59.04 59.04
insertion of the PV plants, the active power injection in the substation drops to 579 kW/phase. Even when the plants operate with FP ≠ 1, the injection of reactive is done mainly by the substation. Despite this, Fig. 7
Figs. 11 and 12 indicate reactive generation of PV plants on summer day. Substantial variations in this generation are observed, mainly in the PV plant 2 between 11 h and 12 h and between 14 h and 15 h.
indicates that if the PV plants provide reactive, the aspect is also observed in Fig. 8 with PV plants
Three-Phase Voltage in base case 1.05 V (p.u)
voltage profile becomes closer to the nominal. This
1
injecting reactive power in the system IEEE34. (B) Daily PV generation and its impact on the losses for the IEEE34 system are analyzed on a (16/07/2014). The same scenario of irradiation and
Fig. 9 indicates the total active load of the system
40 50 bus Three-Phase Voltage with PV, FP = 1
0
10
20
30
0
10
20
30
50
60
70
V (p.u)
1 0
5
10
15
20 25 30 bus Three-Phase Voltage with PV, PF = 1
0
5
10
15
20 25 30 bus Three-Phase Voltage with PV, FP ~= 1
35
40
0
5
10
15
35
40
1
35
40
Va
Vb
Vc
V (p.u)
1.05
kW/phase, which equals 47% of the capacity of each PV plant.
40 bus
1.05
phase of each PV plant during summer day. The active The average generation in the day is equal to 75
70
Three-Phase Voltage in base case
Fig. 10 shows the active power generation at each power reaches the maximum (157 kW/phase) at 11 am.
40 50 60 bus Three-Phase Voltage with PV, FP ~= 1
1.05
V (p.u)
system’s load.
70
Voltages, case of Min. Unbal.—SIS70.
scenario, in the hours of higher solar irradiation and temperature, PV plants supply almost 50% of the
60
1
V (p.u)
curve was considered in the two days. In the summer
30
Fig. 7
and the active powers injected by the substation and the PV plants on summer and winter days. The same load
Vc
20
1.05
which implies that the plants generate the same active power.
Vb
10
1
summer day (02/01/2014) and on a winter day temperature was considered for the two PV plants,
Va 0
1.05 V (p.u)
IEEE34 system. The operating solutions of minimum
Qgrefc 531.63 Qgrefc 530.08 QPVc Qgrefc 423.31 QPVc 47.21 59.04
Fig. 8
1 20 bus
25
30
Voltages, case of Min. Unbal. —IEEE34.
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
54
Load and generations behavior in the summer Load
PPhotovoltaic
2000
1000
0
6
8
3000 Active Power (kW)
PSubstation
Load
10
12 14 16 Hour Load and generations behavior in the winter PgSubstation
18
PPhotovoltaic
2000 1000 0
Active Gener. (kW)
Fig. 9
6
8
10
12 Hour
14
16
18
Total load and generations of IEEE34 system. 200.0 150.0 100.0 50.0 0.0
Fig. 10
Pg a Pg b Pg c
decreases in this new scenario. However, since the winter load is equal to the summer load, the way PV plants participate in the voltage control remains the same, i.e., the central 1 injects reactive in the system, while the central 2, depending on the time of the day, injects or absorbs reactive system. Finally, Fig. 13 indicates the behavior of the voltage in a critical bus of the system throughout the days of summer and winter. Note a variation of 7% in this voltage between the hours of maximum and minimum PV generation. (C) Daily PV generation and its impact on the SIS70 system. The operating solutions of minimum unbalance for the SIS70 system are analyzed in this section with the same active power generated by both PV plants. Fig. 14 indicates that PV plants supply almost 30% Voltage behavior in bus 890 in summer day 02/01
6 7 8 9 10 11 12 13 14 15 16 17 18 19
1.04
Hour
1.02
V (p.u)
Active Power (kW)
3000
Active generation—summer.
1 0.98
100.0 80.0 60.0 40.0 20.0 0.0
Qg1 a
6 7 8 9 10 11 12 13 14 15 16 17 18 19
Qg1 c
6
8
Vb
Vc
10
12 14 16 Hour Voltage behavior in bus 890 in winter day 16/07
18
1.02 1 0.98
Hour
0.96
Fig. 11 IEEE34.
Va
1.04
Qg1 b V (p.u)
Reactive Gener. PV 1 (kVAr)
0.96
Reactive generation of PV plant 1—summer,
Va 6
8
10
Vb 12 Hour
Vc 14
16
18
Fig. 13 Critical bus voltage behavior.
Qg2 b Qg2 c 6 7 8 9 10 11 12 13 14 15 16 17 18 19
Active Power (kW)
Qg2 a
Fig. 12 Reactive generation of PV plant 2—summer, IEEE34.
In the winter scenario, the maximum active generation of each plant is 113 kW/phase and the average is 51 kW/phase or 72% and 32% of available capacity. The control of reactive power plants also
Load
4000
PSubstation
PPhotovoltaic
3000 2000 1000 0
Hour
Active Power (kW)
Reactive. Gener. PV 2 (KVAr)
Load and generations behavior in the summer
80.0 60.0 40.0 20.0 0.0 -20.0 -40.0
6
8
Load
4000
10
12 14 16 Hour Load and generations behavior in the winter PSubstation
18
PPhotovoltaic
3000 2000 1000 0
6
8
10
12 Hour
14
16
Fig. 14 Total load and generations of SIS70 system.
18
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
Reactive Power PV 1 (kVAr)
of the system’s load in the summer with its maximum generation. This generation is even smaller in the winter. The reactive power generations of PV plants on summer day are shown in Figs. 15 and 16, where both plants inject reactive power to the grid. Note that PV plant 2 contributes to 67% of the reactive power control of both PV plants, thus having an important role in voltage control. (D) Impact of single phase PV plants. Fig. 17 shows 50 40 30
Qg1 a
20
Qg1 b
10
Qg1 c
0 6
7
8
9 10 11 12 13 14 15 16 17 18 19 Hour
Reactive Power PV 2 (kVAr)
Fig. 15 SIS70.
Reactive generation of PV plant 1—summer,
100 80 60
Qg2 a
40
Qg2 b
20
Reactive generation of PV plant 2—summer,
The use of the five-parameter equivalent circuit enables a very accurate representation of the PV generation in the TOPF problem and a detailed analysis of the impact of the distributed PV generation. The simulations confirm the variability of this generation and show the importance of PV plants in voltage control. The three-phase representation of the power plants in the OPF enables the voltage unbalance between the phases to be reduced. The methodology used to obtain the PV generation is still approximate and the TOPF program needs to be improved to represent control equipment of the distribution systems. The improvement of these tools is the next step of the research being developed.
The authors would like to thank CAPES and CNPq for their support in the development of this research.
References
Three-Phase Voltage in base case 1.05 V (p.u)
5. Conclusion
Acknowledgments
6 7 8 9 10 11 12 13 14 15 16 17 18 19 Hour
[1]
1 0
5
10
15
20 25 30 bus Three-Phase Voltage with PV, FP = 1
35
40
[2]
1.05 V (p.u)
the behavior of IEEE34 system voltages in the minimum losses solutions when 10 PV plants of 15 kW are connected in the phase a of 10 bus of this system. It can be seen that such insertion significantly increases the voltages in phase a and the voltage unbalance of the system. This aspect consolidates the importance of the three-phase representation of the power plants in the OPF (optimal power flow).
Qg2 c
0
Fig. 16 SIS70.
1 0
5
10
15
20 25 30 bus Three-Phase Voltage with PV, FP ~= 1
0
5
10
15
35
40
[3]
V (p.u)
1.05 1
Fig. 17
55
20 bus
25
30 Va
Voltage, Min. loss—IEEE34, PV
35 Vb
40 Vc
in Phase a.
[4]
Empresa de Pesquisa Energética. 2014. “Inserção da geração fotovoltaica distribuída no Brasil - condicionantes e impactos.” Brasilia. von Jouanne, A., and Banerjee, B. 2001. “Assessment of Voltage Unbalance.” IEEE Trans. on Power Delivery, 782-90. Cheng, C. S., and Shirmohammadi, D. 1995. “A Three-Phase Power Flow Method for Real-Time Distribution System Analysis.” IEEE Trans. on Power System 10 (2): 671-9. Garcia, P. A. N., Pereira, J. L. R., Carneiro, S., da Costa, V. M., and Martins, N. 2000. “Three-Phase Power Flow Calculations Using the Current Injection Method.” IEEE Trans. on Power Systems 15 (2): 508-14.
56
Three-Phase Optimal Power Flow for Study of PV Plant Distributed Impact on Distribution Systems
[5]
Araujo, L. R., Penido, D. R. R., Carneiro, S., and Pereira, J. L. R. 2013. “A Three-Phase Optimal Power Flow Algorithm to Mitigate Voltage Unbalance.” IEEE Trans. on Power Delivery 28 (4): 2394-402. [6] Bruno, S., Lamonaca, S., Stecchi, U., and La Scala, M. 2011. “Unbalanced Three-Phase Optimal Power Flow for Smart Grids.” IEEE Trans. on Industrial Electronics 58 (10): 4504-13. [7] Paudyal, S., Cañizares, C. A., and Bhattacharya, K. 2011. “Optimal Operation of Distribution Feeders in Smart Grids.” IEEE Trans. on Industrial Electronics 58 (10): 4495-503. [8] Dall'Anese, E., Zhu, H., and Giannakis, G. B. 2013. “Distributed Optimal Power Flow for Smart Microgrids.” IEEE Trans. on Smart Grid 4 (3): 1464-75. [9] de Araujo, L. R., Penido, D. R. R., and de Alcântara Vieira, F. 2013. “A Multiphase Optimal Power Flow Algorithm for Unbalanced Distribution Systems.” Electrical Power and Energy Systems, Elsevier 53: 632-42. [10] Baran, A. R., and Fernandes, T. S. P. 2016. “A Three-Phase Optimal Power flow Applied to the Planning of Unbalanced Distribution Networks.” Electrical Power and Energy Systems, Elsevier 74: 301-9. [11] Bozchalui, M. C., Jin, C. R., and Sharma, R. 2014. “Rolling Stochastic Optimization Based Operation of Distribution Systems with PVs and Energy Storages.” In Innovative Smart Grid Technologies Conference (ISGT), 2014 IEEE PES, 1-5. [12] De Soto, W., Klein, S. A., and Beckman, W. A. 2006.
[13]
[14]
[15]
[16]
[17] [18] [19] [20]
“Improvement and Validation of a Model for Photovoltaic Array Performance.” Solar Energy, Elsevier 80: 78-88. Villalva, M. G., Gazoli, J. R., and Filho, E. R. 2009. “Compreensive Approach to Modeling and Simulation of Photovoltaic Arrays.” IEEE Trans. on Power Electronics, 1198-208. Wang, Y.-B., Wu, C.-S., Liao, H., and Xu, H.-H. 2008. “Steady-State Model and Power Flow Analysis of Grid Connected Photovoltaic Power System.” In IEEE International Conference on Industrial Technology, Chengdu, 1-6. Junior Rangel, E. L. 2015. “Modelagem de Centrais Fotovoltaica no Problema de Fluxo de Potência Ótimo.” Universidade Federal de Santa Catarina. Tsai, H.-L., Tu, C.-S., and Su, Y.-J. 2008. “Development of Generalized Photovoltaic Model Using MATLAB/Simulink.” In World Congress on Engineering and Computer Science, 1-6. Monticelli, A. J. 1983. Fluxo de Carga em Redes de Energia Elétrica. Edgard Blücher Ltda. Fang, S.-C., and Puthempura, S. 2003. Linear Optimization and Extensions. Prentice-Hall. IEEE Test Feeders. 2013, April. IEEE Test Feeders. [Online]. Available: http://ewh.ieee.org/soc/. Chiang, H., and Jean-Jumeau, R. Oct. 1990. “Optimal Network Reconfiguration in Distribution System. Part 1: A New Formulation and Solution Methodology.” IEEE Trans. on Power Delivery 5: 1902-9.