2015 5th Nirma University International Conference on Engineering (NUiCONE)
Arduino Controlled War Field Spy Robot using Night Vision Wireless Camera and Android Application Jignesh Patoliya1, Haard Mehta2, Hitesh Patel3 1,2,3
V. T. Patel Department of Electronics and Communication Engineering Charotar University of Science and Technology, Changa, Anand, Gujarat: 388421, India
[email protected] ,
[email protected],
[email protected]
Abstract— The main objective behind developing this robot is for the surveillance of human activities in the war field or border regions in order to reduce infiltrations from the enemy side. The robot consists of night vision wireless camera which can transmit videos of the war field in order to prevent any damage and loss to human life. Military people have a huge risk on their lives while entering an unknown territory. The robot will serve as an appropriate machine for the defense sector to reduce the loss of human life and will also prevent illegal activities. It will help all the military people and armed forces to know the condition of the territory before entering it.
laser beam light and Bomb disposal Kit inbuilt was sent inside a dark room before the military commanders in order to reduce the risk of losing human life. It was so far considered as the best police operation carried out by New South Wales police department with the use of latest technology resulting is less loss of human life.
Keywords — Robot, Night Vision, Bluetooth Module, Android.
I.
INTRODUCTION
The advent of technology has brought a revolutionary change in the field of robotics and automation which ranges in all the sectors from household domestic works to the defense sector. Today in the global market, smart phones also have brought a revolution in changing people’s lifestyle and providing numerous applications on different operating systems. Android operating system is one of these systems build on open source which has made a huge impact providing many applications for robotics to help people in their day to day life. [1]
Fig.1 The sydney siege robot [8]
The main technology used here for serial communication with the robot is the bluetooth technology. Bluetooth technology can be used to share data between two devices considering the range between two devices. The bluetooth module HC-05 will be connected with the robot and the commands to the robot will be given through the android application. [1]
The literature survey includes the architecture of bluetooth module HC-05 along with L293D motor driver IC.
The war field robot consists of arduino uno board as a controller board. It has L293D motor driver IC’s along with a HC-05 bluetooth module. Two DC motors are also used for the motion of the robot. The night vision wireless camera is attached with the robot in order to monitor the situation and the camera can be rotated 360 degrees via the android application through motor.
The bluetooth module HC-05 consists of six pins. The six pins are Key,5V,GND,Tx,Rx,Status. The bluetooth module has two devices i) master device ii) slave device. One device connects to the master while the other device connects to the slave. The connection between the devices takes place as follows:
The sydney siege is considered one of the historic moment in the field of automation and robotics where a robot with a
978-1-4799-9991-0/15/$31.00 ©2015 IEEE
II.
LITERATURE SURVEY
A. Bluetooth Module HC-05 [6, 7]
•
One of the pin Tx is connected to pin Rx of the arduino board while the pin Rx of bluetooth module
is connected to the Tx pin of arduino. Thus, in a way cross-connection is required for the operation of bluetooth module. The GND pin is given to the GND pin of arduino and power supply pin of arduino is given to the pin of power. •
•
In order to have proper communication, the master device must be connected to the slave. Once the pairing is done between two devices, the device will ask to enter the password. The password will be either 0000 or 1234. Enter the password and both the devices will be connected to each other.[3]
• •
The L293D is designed to provide bidirectional drive currents of up to 600-mA at voltages from 4.5V to 36V. The L293D IC has sixteen pins. There are four input pins and four ground pins. Two motors are connected between the four output pins.[3] III. HARDWARE DESIGN
The hardware design consists of the mainly three sections. A. Bluetooth Connection with Arduino: The bluetooth module HC-05 is connected with arduino board with Rx and Tx pins connected with the Tx and Rx pins of arduino board i.e. Cross –Connection. [2,4]
Fig.2 HC-05 Bluetooth Module [9] B. L293D Motor Driver IC •
The L293 and L293D are quadruple high-current half-H drivers.
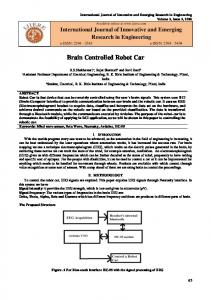
Fig.4 Bluetooth connection with arduino B. Motor Interfacing The DC motors are connected with the L293D IC through pins 3 and 6 and other motor through pins 11 and 14. The input pins are connected with the arduino board. The Figure shown below is the Proteus implementation of connection of arduino with L923D along with the motor interfacing for driving the robot.
Fig.3 L293D Datasheet [9] •
The L293 IS designed to provide bidirectional drive currents of up to 1A at voltage from 4.5V to 36V.
Fig.5 Motor- Arduino interfacing. C. Night Vision Wireless Camera
Fig.7 War Field Robot with Wireless Night vision Camera. IV. ANDROID APPLICATION Millions of users are using android applications today. MIT app inventor is one of the forum which has provided millions of creators and inventors the opportunity to design their own android application. The following are the procedures and steps to create the android application. A. Procedure and Steps for Android Application • Select the ai2.appinventor.mit.edu website and create an account on it. • There are two sections i) Designer ii) Blocks. • First step is to select the Horizontal arrangement from the Layout option.
Fig.6 Nightvision wireless camera [11] Features of Wireless Camera:[11] • Automatic Motion detection features.
• Select the block of List Picker and Upload Image in that from the properties Section. The List Picker will help to pick the required Bluetooth connection from the List. • Now to design the Remote Control,Select the Button option.
• Minimum 100 meters transmission distance without block.
• Select the Tabular Arrangement and then one by one place five buttons which will act as forward, reverse, right, left and stop buttons.
• Imaging Sensor 1/3 Inch-CMOS.
• A slider is placed at the bottom to control the speed of the robot
• CMOS Total Pixels:628*582(PAL)/510*492(NTSC).
• Select Bluetooth Client from the block Connectivity.
• Minimum Illumination:1.5 lux
• Select the Clock option also.
• View angle:62 Degree
• Create two more buttons for rotating the camera left or right.
• Camera Head weight: 15 gm.
• Next step is the blocks designing.
•
Block designing consists of connecting programmed blocks with each other. Some figures below will describe the block programming.
•
Select the block of listpicker before picking and adjust the block of bluetooth client. Next select the listpicker after picking option.
•
Select the block of clock and adjust the bluetooth client block with it. Select the connected option from the different options given like control, Math etc.[5,10]
Fig.8 Android Application in Smartphone
Fig.6 Block Programming [10]
Fig.9 Bluetooth List Selection
Fig 7 Android Application Design [10]
V. • • • •
APPLICATIONS [11]
Military operations. Surveillance along border. Search and Rescue Operation. Maneuvering in hazardous environment. VI. FUTURE ENHANCEMENT
The robot can be made more miniature in size. One of the limitations of this robot is the range of the robot. The bluetooth module used here has a limited range and thus this robot cannot be operated over far distances. To increase the range many other modules such as Wi-Fi and Zigbee can be used. In future, the robot may also consist of gas sensors to detect the poisonous gases in the environment. The robot may also include a bomb disposal kit in order to diffuse bombs in the war field. VII. CONCLUSION In this paper, the model of robot can be described to build a robot using night vision wireless camera run by android application and the people can learn about developing android application in order to control the robot through wireless application using the platform of MIT app inventor. The robot can be made more enhanced by adding features like gas sensors and bomb defuse kit. ACKNOWLEDGMENT The authors convey their gratitude to the department and university for providing the resources along with the appropriate equipments ,which were necessary for completing this research paper. REFERENCES [1]
[2]
[3]
[4] [5] [6] [7]
Selvam, M. "Smart phone based robotic control for surveillance applications."Dept. of ECE, Karpagam University, Coimbatore, Tamil Nadu, International Journal of Research in Engineering and Technology (2014). Jenifer, T. Maria, et al. "Mobile Robot Temperature Monitoring System Controlled by Android Application via Bluetooth." International Journal on Advanced Computer Theory and Engineering (IJACTE) 2.3 (2013). Pahuja, Ritika, and Narender Kumar. "Android Mobile Phone Controlled Bluetooth Robot Using 8051 Microcontroller." Electronics & Communication Engineering, Department, BRCM College of Engineering & Technology, Bahal, India, International Journal of Scientific Engineering and Research (IJSER) www. ijser. in ISSN (Online) (2014): 2347-3878. Mehta, Mr Lokesh, and Mr Pawan Sharma. "SPY Night Vision Robot with Moving Wireless Video Camera & Ultrasonic Sensor." Yeole, Aniket R., et al. "Smart Phone Controlled Robot Using ATMEGA328 Microcontroller." Borker, Kunal,Rohan Gaikwad, and Ajaysingh Rajput. "Wireless Controlled Surveillance Robot." International Journal 2.2 (2014). MacMillan, Neil, et al. "Range-based navigation system for a mobile robot."Computer and Robot Vision (CRV), 2011 Canadian
[8] [9] [10] [11]
Conference on. IEEE, 2011. http://en.wikipedia.org/wiki/2014_Sydney_hostage_crisis-The Sydney Siege "HC-05 Bluetooth Module,Arduino-Bluetooth Interfacing"www.engineersgarage.com. "MIT AppInventor"- www.appinventor.mit.edu. Night Vision Wireless Camera’www.slideshare.net/abhilashkotawar/war-field-spying-robot-withnight-v.