Items 1 - 15 - Abstract - The design of a new course in mechatronics is described, which ... automotive industry, as well as in other engineering sectors. One of the ...
Session 13d4 Team-Oriented, Project-Based Instruction in A New Mechatronics Course Mohan Krishnan*, Shuvra Das+, and Sandra A. Yost, CSJ* *Department of Electrical and Computer Engineering + Department of Mechanical Engineering University of Detroit Mercy Detroit, MI 48221 Abstract - The design of a new course in mechatronics is described, which will serve as the focal point of a wider curriculum development effort to integrate the teaching of mechatronic principles throughout the relevant engineering curricula at the University of Detroit Mercy. The course has a balanced combination of theory and application and seeks to impart competencies that are in great demand in the automotive industry, as well as in other engineering sectors. One of the prominent and innovative features of the course is that it is structured around instructional activities that are predominantly team-oriented and project-based.
• design a custom virtual instrument that supports the implementation of a mechatronics design concept • use computer simulation to predict the dynamic behavior of mechatronic systems • demonstrate effective oral and written communication skills in the context of a collaborative mechatronics design activity. Mechanical System Sensors
Introduction Mechatronics is a term that has been coined to refer to the area of expertise involved in the design and manufacture of a growing number of products that require the integrated application of mechanical and electrical engineering principles [1]. Traction control of a vehicle is an example from automotive mechatronics, but examples abound in other areas as well; for instance, the photocopying machine and the computer disk drive. It is an emerging area whose potential for growth appears to be limitless. Supplementing the teaching of theoretical concepts with liberal doses of practice is vital to student comprehension of theory as well as the retention of students in engineering. The area of Mechatronics provides an excellent basis for the meaningful integration of applications in many courses in Electrical/Computer and Mechanical Engineering, thus serving to keep classrooms vibrant and alive. Moreover, the ABET criteria [2] emphasize the importance of interdisciplinary education and teamwork in the development of an engineer. The new mechatronics course, which is part of a wider curriculum development effort (described in a companion paper [3]) at the University of Detroit Mercy, provides a natural platform for fulfilling these objectives as well. The course was designed to address the following learning outcomes, some of which directly address ABET criteria: • work collaboratively across disciplines on mechatronics projects • make appropriate use of sensors, actuators and mechanisms in mechatronics applications • use a single-board microcontroller to coordinate motion by appropriate interface with sensors and actuators
Signal Conditioning
A/D Conversion
Actuators
D/A Conversion
Computer (Software for Control, Instrumentation)
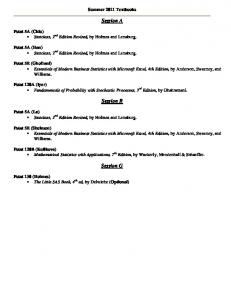
Figure 1: Mechatronic System Model The parts of a typical mechatronic system can be characterized by the block diagram representation of Figure 1. A mechatronic system typically has at its core a mechanical system whose behavior is to be controlled in a prescribed manner. The status of the mechanical system is monitored via an array of electronic sensors suitably interfaced to the computer through appropriate signal conditioning and analog to digital conversion operations. Control decisions are made through software running on the computer. These decisions are implemented through a system of actuators that alter the behavior of the mechanical system in a desirable manner via an appropriate digital-toanalog interface. The above view of a mechatronic system leads naturally to the selection of the topics for the course, a detailed discussion of which is provided in Section II. The team-oriented laboratory activities and projects are described in Section III. Section IV contains a discussion of various aspects of the course, including results of assessment efforts
0-7803-5643-8/99/$10.00 © 1999 IEEE November 10 - 13, 1999 San Juan, Puerto Rico 29th ASEE/IEEE Frontiers in Education Conference 13d4-1
Session 13d4 and suggestions for modifications in the future. Section V is a brief summary.
discussion is specifically geared to preparing students for hands-on activities to follow.
Theoretical Coverage
f) Data Acquisition: The process of converting sensor data into a binary code that can be passed to a microcontroller for processing is explored, as is the reverse process of converting binary output from the controller to a signal that can drive an actuator. In particular, analog to digital (A/D) and digital to analog (D/A) conversion processes are studied. Concepts such as quantization error, the number of bits required in a D/A or A/D converter, sample and hold processes, and the Nyquist sampling rate and aliasing are discussed as issues of critical interest to the mechatronics system designer.
The mechatronics course features a significant hands-on, project-based focus. These activities, which culminate in a capstone design experience, require a fundamental theoretical background. Students have some of the theoretical understanding from prerequisite courses, but they have never considered the integration of mechanical, electronic and computer systems. The first six weeks of the course were spent developing the necessary competencies in the areas critical to mechatronic system design. The following topics were explored: a) The mechatronics concept: An introduction to the mechatronic philosophy and examples of real-world mechatronic systems. b) Mechanical system modeling: A brief overview of first and second order systems. Discussion of similarities between mechanical and electrical systems, individual system components like springs, capacitors, etc., and system variables such as current, velocity, etc., time constant determination of first order systems both from system response and from system parameters. The influence of damping on second order system behavior is explored after a discussion of underdamped, critically damped, and overdamped systems. c) Mechanisms: Discussion of mechanisms in motion and power transmission. Different kinds of joints and mobile elements that comprise mechanisms are discussed. Concept of degrees of freedom and its calculation for simple mechanisms are discussed with the aid of rudimentary examples. Since four-bar mechanisms and simple and compound gear trains are commonly used, they were discussed in detail. d) Sensors: An introductory treatment of some elementary sensors and their role in measuring physical quantities relating to the status of a mechanical system. Examples of sensors used to fuel the discussion are those that measure motion, such as optical encoders, those that measure temperature such as thermocouples, and those that measure force such as strain gauges. While not comprehensive in its nature, the level of coverage is sufficient to provide an awareness of sensor applications and to prepare the students for subsequent laboratory activities. e) Signal conditioning: The need for conditioning sensor signal outputs and the use of the operational amplifier in constructing simple signal conditioning circuits is discussed. Specific topics are inverting/non-inverting amplifiers, differential and instrumentation amplifiers, and filters. The
g) Controls: This segment of the course addresses fundamental concepts pertaining to feedback control. Because the mechanical engineering students lack a background in Laplace transforms and transfer functions, the topic is presented on a qualitative level. Performance criteria for transient and steady-state response are discussed, as is the concept of frequency response. Two commonly used control strategies, “bang-bang” control and PID (proportional-integral-derivative) control are described and compared. h) Microcontroller: A brief overview of microcomputer architecture provides a context for the discussion of the role of microcontrollers in mechatronics applications. Limitations such as memory, fixed point arithmetic, and the number of input/output lines available are discussed as factors that affect the way control algorithms may be implemented. An overview of the operation of the BASIC Stamp II [4] provides the students with critical information needed for the subsequent hands-on project. i) Actuators: This segment carries a discussion of the most common types of actuators such as electromechanical, solenoid, and solid state relays, as well as the DC motor. The latter is treated in some detail including its physical construction, principles of operation and performance characteristics.
Team-Oriented Project-Based Activities A prominent feature of the course is the strong emphasis on hands-on activities to support learning. The following activities were programmed: a) Team building: The first class session included exercises that promote teaming skills. The students were divided into groups of four for these activities. The first exercise was a paper tower design and construction activity. The students were given a description of the problem, along with constraints and a Cost/Performance Criterion, which accounted for the height of the tower, the number of sheets
0-7803-5643-8/99/$10.00 © 1999 IEEE November 10 - 13, 1999 San Juan, Puerto Rico 29th ASEE/IEEE Frontiers in Education Conference 13d4-2
Session 13d4 of paper used, and the time taken to construct the tower. The goal was to build a tall tower, with a small number of sheets of paper, in a short period of time. A 20-minute planning and design phase preceded the construction phase, which lasted approximately 5 minutes. Before the construction phase, each group gave a brief oral presentation on its plan to construct the tower, including an estimate of the expected Cost/Performance Criterion. Because of the time constraints, groups were motivated to plan exactly how they were to work together in order to finish construction in under 5 minutes, thus avoiding time penalties. A second team building exercise posed the hypothetical situation of having 10 minutes to evacuate a sinking boat in the South Pacific, and needing to prioritize a list of items available to be taken to the life raft. The students did the prioritizing individually and then together as a group. The answers were compared to those of a survival expert. In almost all cases, the group scores were better than the individual scores. This exercise demonstrated the value of an open mind to different perspectives. b) Instrumentation: During this 2-week segment, students were introduced to LabVIEW [5], a virtual instrumentation (VI) tool for automatic data acquisition, data manipulation and process control. With some instruction on LabVIEW (primarily through the on-line tutorial) the students were assigned two tasks. The first task was to build a VI that could be used to send a digital signal to a solid-state relay, so that a fan could be turned on and off through a virtual switch. The second, and relatively more complex task, was to build a load cell using strain gages mounted on a cantilever beam and connected to four arms of a wheatstone bridge. The load cell was used to collect a strain data signal, which was then amplified through an operational amplifier circuit and converted to weight/load through proper calibration within the VI. The calibrated set-up was used to measure static load, impact load from falling objects, and dynamic response (i.e. frequency and damping) of the vibrating beam. The damping fluid was altered from air to water to oil and the corresponding damping coefficient in each fluid was determined. The students performed all the instrumentation and program development and submitted a report on the activity. c) Simulation and modeling tools: Saber [6] is a software tool that enables the modeling and simulation of mixed technology systems that contain both electrical and mechanical components. Two weeks of class time were allocated to the exposure of students to Saber. An on-line walk-through session took place during the first week during which students were exposed to the most basic features of Saber such as creating and editing system sketches, simulating the system, and carrying out post-processing measurements on waveforms generated by simulation. The examples used included electrical components such as DC
motors, amplifiers, and sources, as well as mechanical components such as rack-and-pinion, spring/mass/damper arrangements, and gears. During the second week the students were assigned a small mechatronic assignment to complete that involved constructing and simulating a system model for the cruise control of an automobile. d) Capstone experience: The last four weeks of the course focused on a “capstone-like” mechatronics design project. In this initial offering of the course, the students were asked to design an autonomous vehicle that was capable of navigating itself down a hallway, without colliding with walls or other obstacles. Figure 2 shows such a vehicle designed and built by one of the groups. The vehicle used a BASIC Stamp II processor as a controller, and a Polaroid 6500 ultrasound sensor to monitor the distance from obstacles. It used two hobby servomotors modified to permit continuous motion for driving the vehicle. These servos are coordinated to provide vehicle steering in a tank drive mode paradigm. For example, to turn the vehicle, the directions of the servos are set so that the wheels of the vehicle turn in opposite directions. A third servo is provided to allow the ultrasound sensor to scan and look for obstacles to the side as well as to the front of the vehicle. This project brings together all of the aspects of mechatronic system design. Students must learn the characteristics of the sensor and the servomotors. They must also become proficient in writing code for the Stamp II, and learn how to make the proper connections among the controller, sensor, and actuators. The placement of the wheels and the other components on the chassis requires some thought as to the stability of the vehicle, the clearances required for moving parts, and the lengths required for wiring harnesses. Because there are many tasks required for the successful completion of the project, the team aspect of the project is of particular importance. The student teams must coordinate efforts to make sure that all subsystems work as desired and that they work together to achieve the desired operation.
Figure 2: Autonomous vehicle built by student group
0-7803-5643-8/99/$10.00 © 1999 IEEE November 10 - 13, 1999 San Juan, Puerto Rico 29th ASEE/IEEE Frontiers in Education Conference 13d4-3
Session 13d4 During the last week of the course, students had an opportunity to demo the vehicle they designed and benchmark it against the designs of other groups. During the final exam week, the teams made a formal presentation on their design of the autonomous vehicle. This provided an opportunity to see alternative approaches to the solution of the problem, and to learn how a design might be improved using information learned from another group’s experience.
Discussion a) Team teaching: The course was taught by a team of three faculty, two from Electrical and Computer Engineering and one from Mechanical Engineering. This interdisciplinary mix of faculty was a positive feature of the course. The class had many more Mechanical Engineering students than Electrical Engineering students. This was due to the fact that the Mechatronics course was a Technical Elective that conflicted with another popular EE Technical Elective. A more even distribution of students between the two disciplines is desirable and steps will be taken to schedule the course appropriately in the future to attract a more broadbased audience. b) Laboratory component: A course of this nature requires a significant amount of hands-on activity to promote comprehension of concepts. One option was to accommodate this by adding a 1-credit Mechatronics Laboratory component. However, this was not logistically feasible in the existing engineering curriculum. The only other alternative was to undertake the laboratory component as a part of the 3-credit lecture course; requiring students to stay behind an extra hour after class on certain days facilitated this. The significant proportion (roughly 50%) of the course spent in laboratory activities meant that depth had to be sacrificed in favor of breadth of coverage. Again, this was a conscious choice on the part of the authors. In this context, it is fair to point out that the course is more of a Mechatronics awareness experience, but one that fulfills this goal very nicely. A more in-depth follow-up course at the graduate level that puts greater emphasis on the simulation and modeling aspect would be very appropriate and is currently being considered. Another factor that validates the level of coverage is the background of the students in the class. Because of the mixed nature of the audience, some time had to be spent filling in appropriate background information for either the ME or EE student segments, but mainly the former. Wherever possible, some of this will be eliminated in future offerings by appropriate coordination with instructors of pre-requisite courses. In particular, the ME students are required to take a survey course in Electrical Engineering in their junior year that can be suitably tailored to serve as a lead-in to the Mechatronics course, thus eliminating the need to fill in background information.
c) Choice of textbook: Several textbooks were examined in the preparatory period leading up to the course. For the same reason as discussed above, viz., the issue of depth of coverage and the stress on the laboratory component, a single all-purpose textbook that was suitable for the course could not be identified. Consequently there was no textbook requirement for the course. However, a set of notes was made available to the students via a file upload-download facility on the course web page [7]. d) Grading: The grading for the course was based on both individual and group achievements. The individual component was based on periodic quizzes and individual homework. The absence of traditional exams was in keeping with the nature of the course and the level of coverage of material. The various group activities were the basis for the group grading component and assumed special importance in light of the significant amount of time allocated to them. More details are provided in the discussion that follows on assessment. e) Assessment: The assessment strategy for the Mechatronics pilot course was designed to measure both student performance in each of the outcomes noted in Section I, and student perceptions of their learning from participating in course activities. Student performance in critical areas relating to the outcomes was assessed through three different components – individual quizzes, individual/group homework exercises (this included the LabVIEW and Saber activity reports), and the capstone project. The quizzes were worth 25% of the overall grade and were designed to test mastery of the theoretical material as detailed in Section II, which is indirectly related to the achievement of the learning objectives. The distribution of quiz grades – max 98%, min 34%, average 75% - appear to indicate satisfactory comprehension of the theoretical material in general. The homework and capstone project accounted for 35% and 40% of the overall grade respectively; these were specifically designed to assess accomplishment of the course learning outcomes. Of these exercises, the results of the capstone design experience are specifically discussed here. The assessment was based on four components – vehicle performance, oral presentation, project report, and task distribution between members. Students received specific criteria to guide their efforts, and were informed that these criteria would be used to grade the products and presentation. All the groups were successful in getting their vehicles to work. For the report and presentation categories, the teams were ranked on a relative scale and this ranking was converted to a numerical grade. The last category (task distribution within a group) was used to differentiate between the accomplishments of the members of a group. The grade distribution for the members of one group corresponding to the capstone project was three As, an
0-7803-5643-8/99/$10.00 © 1999 IEEE November 10 - 13, 1999 San Juan, Puerto Rico 29th ASEE/IEEE Frontiers in Education Conference 13d4-4
Session 13d4 A-, and a B+ and emphasized individual accountability in meeting the learning outcomes; this distribution was representative of the grades for other groups. The lowest overall grade in the class was a C (corresponding to 70% competency) but only one student got this grade – the rest got B or higher. We believe that these results demonstrate achievement of the learning outcomes. Please rate the items 1-15 on the following scale: SA Strongly agree A Agree N Neutral D Disagree SD Strongly disagree
Table 1 contains the average of the responses to the 12 rating scale items, while Table 2 contains selected responses to the 3 write-in questions. It can be seen from the data in Table 2 that, on the whole, the students had a positive perception about the various elements of the course (average responses were around 2). In particular, students acknowledged the usefulness of the course for practicing engineers (item #1) and thought that the autonomous vehicle project was a very positive experience (item #10). Table 1: Results of student perception assessment (average of rating scale responses) Item #
1
Average Response (Strongly agree=1 Strongly disagree=5) 1.67
2
1.81
3
2.10
4
2.29
5
1.86
6
2.00
7
2.10
8
2.05
9
2.67
10
1.33
11
1.90
12
1.90
1.
This course was useful for me as a practicing engineer. 2. The content of the course was appropriate. 3. The course had an appropriate balance of breadth and depth. 4. The quizzes were appropriate for the level of the course. 5. The assignments were appropriate for the level of the course. 6. Working in teams enhanced my learning experience in this course. 7. The background coverage provided for the topics was sufficient. 8. The LabVIEW activity was valuable. 9. The introduction to modeling using Saber was valuable. 10. The autonomous vehicle project was valuable. 11. The resources provided for completing the autonomous vehicle project were adequate. 12. If a follow-up course were to be offered that explored the theory, modeling and simulation of mechatronic systems in more depth, I would be interested in taking it. Write-in Questions: 13. What aspects of the course were the most satisfying to you? 14. What changes would have made the course more satisfying for you? 15. How can the final project be improved to make it a better learning experience?
Figure 3: Student perception assessment items Student perceptions of their own learning and their opinions concerning the course were elicited to determine the extent to which students believed the course contributed to their learning. Students completed a 15-item survey pertaining to various aspects of the course using a rating scale as well as open-ended response items (see Figure 3).
The write-in responses to items 13-15 as shown in Table 2 were quite encouraging, while also providing valuable feedback that we will use in improving future offerings of the course. In particular, we would like to increase the depth of the course, but the varied background of the students, the breadth of the material covered, and the philosophy of emphasizing hands-on activities to support learning make this a challenge. f) On-line resources: A webpage [7] was created for the course to support instructional activity. Such resources as news items originating from the instructors, asynchronous on-line discussion, file upload/download, a library of interesting URLs pertaining to mechatronics, etc., were available through this page. The details of these electronic resources are discussed in a companion paper [8].
0-7803-5643-8/99/$10.00 © 1999 IEEE November 10 - 13, 1999 San Juan, Puerto Rico 29th ASEE/IEEE Frontiers in Education Conference 13d4-5
Session 13d4 Table 2: Results of student perception assessment (selected write-in responses) Item #
Write-in responses
13
"The autonomous vehicle, building and programming it, then actually seeing it respond. It is better than just bookwork as in other classes." “The hands-on activities are great! More classes are needed to close the gap between theory and application.” "Enhanced understanding of mechatronic items I use, discuss, or see in the workplace. This ties together many of my earlier classes.”
14
“I like the balance of the engineering fields exposed in the classwork, i.e. as an ME it is nice to see/understand correlations with control and electrical engineering.” "More background information before labs are conducted, i.e. LabVIEW instructions typed, etc., so that we can prep before class.” "Better explanation of LabVIEW – I am very nervous about programming!” "Being able to choose our own groups that would satisfy our personal schedules.” “Make this into two courses in order to go more in-depth.” "More activities that relate to industry."
15
“Need a textbook.” "Make it a capstone project by using LabVIEW/Saber, etc. Maybe model the vehicle before building it." "More time would have been nice." "More in-depth programming exposure." "More time was spent trying to overcome hardware problems, leaving less for development of software." "Give more time and make it more complicated."
Summary A new introductory course in mechatronics has been developed to serve senior undergraduate and graduate students. It is expected to be the catalyst for a curriculum wide introduction of the mechatronics theme in courses where it is a natural fit. Its uniqueness lies in the incorporation of extensive project-based activities to support understanding at the cost of theoretical depth of coverage; results of assessment efforts seem to justify this approach. There are several beneficial effects related to accreditation under ABET 2000 [2] that will accrue as a result of this effort. The interdisciplinary nature of mechatronics directly addresses the ABET criterion requiring "an ability to function on multi-disciplinary teams". In addition, the nature of the experiential component incorporated into the course teaches the "ability to design and conduct experiments, as well as to analyze and interpret data". The course will enable the Mechanical and Electrical Engineering programs to have a thematic orientation, which will be a plus in attracting students to careers in engineering. The theme itself is a natural fit to the clientele of the University of Detroit Mercy, which is predominantly the automotive industry. The theme will provide the continuity that will enable the integrated development of engineering design principles throughout the curriculum.
References [1] S. Ashley, “Getting a Hold on Mechatronics”, Mechanical Engineering, May 1997, pp. 60-63. [2] http://www.abet.org/eac/EAC_99-00_Criteria.htm, URL of ABET Engineering Criteria 2000. [3] Sandra A. Yost, Mohan Krishnan, Shuvra Das, "Mechatronics: A Comprehensive, Interdisciplinary Curriculum Development Initiative", to appear in Proceedings of the 1999 Frontiers in Education Conference, San Juan, Puerto Rico, November 1999. [4] http://www.parallaxinc.com/, URL of Parallax, the makers of the Basic Stamp microcontroller. [5] http://www.natinst.com/, URL of National Instruments, the creators of LabVIEW Virtual Instrument software. [6] http://www.analogy.com/, URL of Analogy, the creators of Saber. [7] http://courses.udmercy.edu/e478/, URL of mechatronics course web page. [8] Shuvra Das, Sandra A. Yost, Mohan Krishnan, “Effective Use of Web-based Communication Tools in a Team-oriented, Project-based, Multi-disciplinary course”, to appear in Proceedings of the 1999 Frontiers in Education Conference, San Juan, Puerto Rico, November 1999.
0-7803-5643-8/99/$10.00 © 1999 IEEE November 10 - 13, 1999 San Juan, Puerto Rico 29th ASEE/IEEE Frontiers in Education Conference 13d4-6