Simulating Spatial Choices with Quasi-Continuous Representation of Urban Space: An Application of MCMC Algorithms Akira Kikuchi Department of Civil Engineering Systems Kyoto University, Japan
[email protected]
Ryuichi Kitamura Department of Civil Engineering Systems Kyoto University and Department of Civil and Environmental Engineering University of California, Davis Toshiyuki Yamamoto Department of Geotechnical and Environmental Engineering Nagoya University Satoshi Fujii Department of Civil Engineering Tokyo Institute of Technology
August, 2002
Abstract The application of an MCMC algorithm to the simulation of destination choice using a multinomial logit model, is proposed. The numerical analyses demonstrate that the MCMC algorithm is accurate, the effect of initial condition diminishes quite rapidly, and the algorithm drastically reduces computational requirements. The case study shows that simulation of individuals’ daily travel behavior can be performed in a practical manner on a Pentium II PC, with the grid system that divides the study area into 10 m × 10 m parcels, generating destination choice sets containing as many as 740,000 alternatives.
1 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
Simulating Spatial Choices with Quasi-Continuous Representation of Urban Space: An Application of MCMC Algorithms Akira Kikuchi, Ryuichi Kitamura, Toshiyuki Yamamoto and Satoshi Fujii
1. Introduction Despite the widespread use of disaggregate choice models in urban passenger travel demand forecasting, virtually all practical studies of travel demand to date have used a system of zones to represent urban space. This leads to the well recognized problems of the loss of statistical efficiency and inaccuracy due to aggregation of information into zonal statistics (e.g., zonal means, medians or totals). The problem of inaccuracy can be most noticeable for level-of-service (LOS) variables; because each zone is represented by a point, all LOS attributes become identical, given the origin and destination zones of a trip, irrespective of its actual starting and ending location. Thus, given the mode of travel and given the zone, all intra-zonal trips are assumed to have the same trip duration; and a single representative value is assigned as access walking time for all transit trips originating from the zone, no matter how large the zone may be. This could lead to serious errors in model estimation and demand prediction, especially for shorter trips, where larger portions of the total variations in LOS attributes are intra-zonal. In addition to the problems of statistical efficiency and inaccuracy, the use of zone systems has also limited the application areas of resulting models and procedures. The inaccuracy in representing LOS attributes for short trips implies walk and bicycle trips cannot be meaningfully introduced into mode choice models. The choice of parking location cannot be analyzed with zones because only one representative value can be assigned to the walking distance from a parking facility to the final destination, no matter where the parking facility and the destination might be located. Evaluation of alternative bus routes would be difficult with a zone system. Abilities to address these issues, however, are becoming increasingly important as travel demand management schemes become the major planning options and more emphasis is placed on multi-modal transportation systems. An example of study that does not adapt a zone system can be found in Ben-Akiva & Watanatada (1981) where a destination choice model is constructed on continuous space, treating each point in the space as a destination alternative. The model, however, is applicable only on an idealized abstract plane. It is not at all obvious how this approach can be adapted to demand forecasting in real-world urban areas. Another interesting exception can be found in the modeling exercise in Portland, Oregon, where geographical information is attached to network links, not to zones. While this is an innovative approach that resolves many of the deficiencies of the zone system, it nevertheless involves degrees of spatial aggregation, making errors inevasible. For example, access walk time to a transit stop may be subject to a large degree of error when a link traverses a long distance in space, or when it corresponds to a large area. Also, it is not immediately clear how effective this approach might be in handing walk or bicycle trips and the problem of parking location choice as the exact location of a parking facility is not represented. Kikuchi, Kobata et al. (2000) proposed the use of a coordinates system to represent the spatial location of a trip end. Information unique to a location (e.g., land use, resident characteristics) was coded using a grid system that divides the study area into numerous 10 m × 10 m parcels, which are 1 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
each designated by their coordinates. A geographical information system (GIS) software package was used to systematically prepare land use, socio-demographic, and LOS data on the grid system. Based on the database thus prepared, Kikuchi et al. estimated nested logit models of destination and mode choice, using the 10 m × 10 m parcels as alternatives of destination choice. With the use of coordinates, the location of any opportunity can be coded quite accurately, facilitating proper computation of walk time and other LOS attributes. This approach, however, involves the difficulty that the choice set for destination choice becomes immense; it would be impractical, even with the recent advent of fast and cheap computers, to evaluate destination choice probabilities for the respective 10 m × 10 m parcels and simulate destination choice.1 The objectives of this study are to propose an Markov chain Monte Carlo (MCMC) algorithm to drastically reduce the computation time required to simulate destination choice with colossal choice sets; to numerically examine its accuracy relative to initial condition; and to present an example of empirical application. The study demonstrates that with the MCMC algorithm it is practical to simulate destination choice with a quasi-continuous plane while realistically representing LOS attributes of trips. This is expected to extend the applicability of discrete choice models to new types of planning problems. This paper is organized as follows. The MCMC algorithm applied in this study is outlined in Section 2. Its accuracy is examined on the destination choice problem in an abstract uniform circular plane in Section 3. The issue of initial condition, i.e., the number of iterations to be performed before the effect of initial condition wears off, is examined in Section 4. A grid system that divides the study area into 10 m × 10 m parcels, is adopted in this numerical exercise. Following these, Section 5 presents the application of a micro-simulator of individuals’ daily travel behavior, PCATS, along with the grid system of Section 4, to evaluate alternative transportation planning measures. Section 6 is a conclusion.
2. The MCMC Algorithm Let the probability that the destination at r = (x, y) will be chosen, PD ( r ) , be expressed as PD ( r ) =
exp ( β′X ( r ) )
(1)
∑ exp (β′X ( r′) )
∀r∈Ω
where β is the vector of coefficients; X ( r ) is the vector of the attributes of the destination opportunity at r = (x, y); and Ω is the choice set. 2 If one wishes to simulate destination choice according to this model, one must evaluate PD ( r ) for each alternative destination. If there are N
alternatives in Ω, this would imply that the exponential function, exp ( β′X ( r ) ) , need be evaluated N times. This is a very time consuming process when N is very large, e.g., hundreds of thousands. It has therefore been proposed by Yamamoto et al. (2001) to apply MCMC algorithms to simulate 1
If the IIA property holds, logit models can be estimated using a sample of alternatives and thus creating choice sets of manageable size. To simulate destination choice in the conventional manner, on the other hand, it would be required to compute choice probabilities for the respective alternatives in the choice set, which takes a substantial computation time. 2 It is assumed here that the IIA property holds and the logit formulation is the correct one. In application, attributes of alternatives in geographical proximity can be incorporated into the utility function of a destination alternative to represent systematic spatial correlation. Problem does arise when spatial correlation cannot be represented by measured variables.
2 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
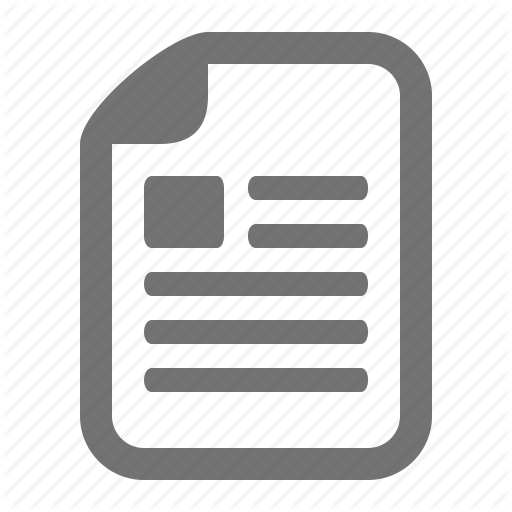
discrete choice without evaluating choice probabilities of Eq. (1). MCMC algorithms originated in statistical physics and have been applied in a number of areas in recent years. They are algorithms to draw samples from a given probabilistic distribution through dynamics as represented by a Markov chain. MCMC algorithms have been applied in the area of transportation analysis to estimate parameters of discrete choice models (Hajivassiliou et al., 1996; Chiang et al., 1999), to determine network flow under stochastic user equilibrium (Hazelton et al., 1996), and to generate individuals’ daily travel patterns (Yamamoto et al., 2001). The procedure adopted in this study, presented schematically in Fig. 1, can be described as follows. 1. Select randomly, from set Ω, an initial state ri = (x0, y0). 2. Select randomly, from set Ω, an alternative state rj = (xa, ya) 3. Compute the ratio of choice probabilities: γ=
PD ( r j ) PD ( ri )
=
(
exp β′X ( r j )
)
(2)
exp (β′X ( ri ) )
4. Generate a uniform random number, ε, in (0, 1) and if γ > ε, let ri = (x0, y0) ← rj = (xa, ya) 5. Sample the value of (x0, y0) if so desired. Return to 2. After Steps 2 through 5 are repeated large enough times and the effect of the initial condition has diminished, the value of ri = (x0, y0) can be drawn with large enough intervals as the steps are repeated. Resulting sample values of ri = (x0, y0) may be viewed as realizations of destination choices that are from the choice probabilities as determined by the model of Eq. (1).
Source: Kikuchi, Yamamoto et al. (2001)
Figure 1. MCMC Algorithm to Simulate Destination Choices According to the Model of Equation 1 3 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
Notice that when the ratio of two choice probabilities, PD ( r j ) and PD ( ri ) is taken, the denominator of Eq. (1) cancels out, leaving only two exponential terms in the ratio. This can be very easily computed. Consequently, despite the fact that the algorithm calls for many iterations of Steps 2 through 5, it achieves a great deal of reduction in computational requirement, as a numerical example will show later in this study. 3. Exercise on an Abstract Circular City3 To test the adequacy of the MCMC algorithm described above, destination choices are simulated on an abstract circular city and the resulting distribution of destination locations is compared with the theoretical distribution. Consider a circular region around center O with a radius of 1. Suppose the traveler located at O chooses a destination from among the destinations that are distributed uniformly in the circular region. Also suppose that the travel cost to a destination is proportional to the distance from O to the destination, and that travel cost is the only factor that systematically influences the destination choice (it is thus assumed that all opportunities have the identical, objectively measured quality). Let the utility of a destination at distance r from O (0 ≤ r ≤ 1) be V ( r ) = − λr
(λ > 0) .
(3)
Assuming that the probability that a destination at r will be chosen is proportional to exp(V (r )) and letting 1
∫ 2πrK exp(V (r ))dr = 1 ,
(4)
λ2 . K= 2π{1 − (λ + 1)e − λ }
(5)
0
we obtain
The theoretical probability that a destination falls in a circular band of width ∆r at distance r from O, is given as P(r ) =
λ2 re − λ r ∆ r . −λ 1 − (λ + 1)e
(6)
With these settings, the MCMC algorithm is applied to simulate destination choice in this abstract circular region. An initial r is randomly chosen, then Steps 2 through 5 are repeated 10,000 times to eliminate any effect of the initial condition. Then a destination location, r, is sampled once every 1,000 iterations. Figs. 2 and 3 show the distribution of r’s thus sampled along with the theoretical distribution as given by Eq. (6). As the value of λ, 1.0 (Fig. 2) and 5.0 (Fig. 3) are used. A value of 0.05 is adopted for ∆r for computation. 3
The discussion of this section is based on Kikuchi, Yamamoto et al. (2000).
4 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
It is evident from these two figures that the simulated distribution closely represents the theoretical distribution. Chi-square test yielded a χ2 value of 14.92 for λ = 1.0 and 10.46 for λ = 5.0, while the critical value with α = 0.05 is 30.14 with 19 degrees of freedom. There is no reason to believe that the simulated distribution is different from the theoretical distribution at any reasonable level of significance. The numerical exercise here thus offers evidence that the use of the MCMC algorithm leads to accurate simulation of destination choice.
800
2π r × P ( r ) 1.6
700
1.4
600
Theoretical
500 Frequency
1.2
Simulation
1
400
0.8
300
0.6
200
0.4
100
0.2
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.5
0.4
0.45
0.35
0.3
0.2
0.25
0.15
0.1
0
0 0.05
0
Distance from the Origin
Figure 2. Simulated and Theoretical Distributions of Destination Locations in a Uniform Circular Region: λ = 1.0
1000
2π r × P ( r ) 2
900
1.8
800
Theoretical
700 Frequency
1.6
Simulation
1.4
600
1.2
500
1
400
0.8
300
0.6
200
0.4
100
0.2 1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.5
0.45
0.4
0.3
0.35
0.25
0.2
0.15
0.1
0
0 0.05
0 Distance from the Origin
Figure 3. Simulated and Theoretical Distributions of Destination Locations in a Uniform Circular Region: λ = 5.0
5 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
4. Effects of Initial Condition4 As noted earlier, choices can be simulated with the MCMC algorithm by drawing samples with large enough intervals after the effect of initial condition has diminished. When simulating destination choice behavior in transportation planning analysis, it is rather rare that repeated choices, made by the same individual under the same condition, are simulated; most applications involve unrepeated choices made by many individuals under different conditions. The sampling interval, therefore, is less likely to be an issue. In this section, the number of iterations that are needed to eliminate the effect of initial condition is assessed with empirical data. The study area is the central part of the City of Kyoto, Japan, comprising a rectangular area of approximately 13 km (east-west) and 11 km (north-south). This area contains the downtown commercial and business district, which is a rectangular area of approximately 1.8 km by 1.6 km. This area is served by subway lines and private rail lines, and has a concentration of large retail stores and entertainment establishments. Details of the area and the data used can be found in Kikuchi, Kobata et al. (2000). The area contains approximately 1.4 million 10 m × 10 m parcels, a little over half of which (740,000) qualify as destination opportunities. Destination choice models are estimated with these parcels as alternatives, and used in this exercise to simulation destination choice. The following procedure is adopted to examine the effect of initial condition: 1. Group the 740,000 some alternative destinations into G groups of equal size. 2. Determine the theoretical probability, Pi, with which an alternative in group i will be chosen. This probability is evaluated by adding up the choice probabilities of all the alternatives in the group as determined by the choice model. 3. Sample a value of (x0, y0) after M iterations of Steps 2 through 5 as defined earlier. Repeat this L times to produce L sample values of (x0, y0), or, L sample destination locations. 4. Group the L destinations into the G groups. Test the distribution of the L sample destinations against the theoretical distribution as computed in 2. This procedure is repeated with M = 0, 1, 2, 3, 4, 5, 10, 50 and 100. The values used for G and L are 100 and 1000, respectively. The results are summarized in Table 1 in terms of the χ2 values. Table 1. Test of the Distribution of Simulated Destinations M 0 1 2 3 4 5 10 50 100
χ2 1380.56 325.03 199.32 125.65 102.72 85.25 45.04 12.54 4.58
p < 0.005 < 0.005 < 0.005 0.04 0.38 0.84 > 0.995 > 0.995 > 0.995
The degrees of freedom associated with the χ2 statistics are 99. p = level of significance.
4
Analysis of this section is based on Kikuchi, Kobata et al. (2000).
6 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
Drawing samples with M = 0 implies to draw destinations purely randomly, irrespective of the choice probabilities of the respective destinations. With a χ2 value of 1380.56 (df = 99), the result indicates a strong discrepancy between the distribution of sample destinations and the theoretical distribution. The fit improves rapidly as the value of M increases; with M = 4, χ2 = 102.72 and the significance level, p, is 0.38. The results indicate that the distribution of sample destinations is statistically not different from the theoretical distribution after mere 4 iterations of Steps 2 through 5. In other words, the effect of initial condition diminishes quite quickly in this application. The computational efficiency of the MCMC algorithm is evident from this test. The results here are indeed quite encouraging. Suppose, as is the case in this numerical example, there are about 740,000 alternatives. To evaluate the denominator of the logit destination choice model, it is necessary to evaluate exponential functions 740,000 times. Then the probabilities of the 740,000 alternatives must be computed and converted to cumulative probabilities before a destination sample can be drawn according to the choice probabilities. Applying the MCMC algorithm with the very appropriate assumption that the effect of initial condition diminishes after 100 iteration, on the other hand, sampling one destination location involves computing exponential functions for mere 102 times (once for the initial sample, 100 times for the 100 iterations, then once for drawing a sample). In this example, the MCMC algorithm reduces computational requirements to less than 1/7250 of what the conventional method would require. The tremendous advantage of the proposed approach would be obvious. 5. Application with Micro-simulator PCATS5 The grid system is now applied with the micro-simulator, PCATS, which simulates individuals’ daily travel patterns along a continuous time axis. PCATS simulates travel behavior within the confine of the space-time prism and mode availability constraints. Its components include: activity type choice models, activity duration models, and destination-mode joint choice models. Further discussions on PCATS and its application examples can be found in: Fujii et al. (1997), Kitamura & Fujii (1998), Kitamura et al. (1998), Kawata et al. (1999), Fujii et al. (2000), Iida et al. (2000), Kitamura et al. (2000), Kikuchi et al. (2001), and Kitamura et al. (2002). The objective of this exercise is to examine whether simulation of individuals’ travel behavior is practical with the grid system that define 10 m × 10 m parcels as the alternatives of destination choice. Unfortunately data, especially records of travel behavior, have not been collected in a form that is consistent with the grid system. Consequently some elements of the data used here are synthetically generated as described below. When data are available, the procedure followed in the exercise here can be applied for more authentic analysis of transportation policies.6
5.1. Data Preparation The same central part of Kyoto as in Section 4 is used as the study area here. The location of railroad stations, bus stops and other transportation facilities are input to the database using geographical information system (GIS) software.7 Parcel-to-parcel LOS attributes are 5
This section is based on Kikuchi, Kobata et al. (2000) The authors have successfully conducted a survey of visitors of downtown Kyoto, where the paths taken and the locations visited by the respondents are recorded such that the exact location and route can be identified. In addition, methods have been developed to record the trajectories of individuals in space and time using cellular phones. It is believed that behavioral data can be collected for the use with the grid system with adequate levels of accuracy in the very near future. 7 The GIS software used in this study is SIS (Spatial Information System V5.2, Informatix, Inc.). 6
7 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
determined first by simulating auto and bus traffic on a network of major roadways for each hour of the day. This simulation produced the travel time, number of transfers, and transit fare between each pair of nodes on the network. LOS information between 10 m × 10 m parcels is obtained by inter/extrapolating the LOS data obtained from the simulation. The duration of a walk or bicycle trip is evaluated by applying a constant to the parcel-to-parcel straight-line distance obtained by the GIS software. The land use data developed in the study is based on information compiled for 3,635 neighborhood units in the City of Kyoto. Each neighborhood unit typically comprises of housing units on the two block faces that share a street segment. Since no information is available on how land uses are distributed within each neighborhood unit, they are uniformly distributed to parcels that lie within a neighborhood unit. Obviously this is an approximation. Ideally the land use database should be developed based on information on each plot of land, as is done in Portland, Oregon. Models of destination and mode choice are developed based on the grid system and the land use database thus developed (Kikuchi, Kobata et al., 2000), and applied to evaluate selected TDM measures (Kikuchi, Fujii et al., 2001). Travel data are obtained from a large-scale household travel survey conducted in the Kei-Han-Shin (Kyoto-Osaka-Kobe) metropolitan area in 1990. Records of 15,424 individuals (expanded to 855,446 individuals in the simulation) who resided in the study area and whose trip ends were all contained in it, are extracted and used in the simulation. Trip ends, as well as residence zone and work location, are coded in terms of zones in these records. To run PCATS with the grid system, location must be coded in terms of the 10 m × 10 m parcel. This was done synthetically by assigning to a trip end (or residence/job location) a parcel that is selected from the zone the trip end belongs to, using appropriate criteria. The MCMC algorithm described in Section 2 is applied here with a slight modification. With the assumption that trip ends are spatially distributed in a zone according to the distribution of opportunities (e.g., the number of retail employees in case of shopping trips; and the population in case of home location), a parcel is sampled from the zone using the MCMC algorithm of Section 2, with γ defined as, e.g., γ=
Population(ra ) where Population(r ) = population in parcel r . Population(r0 )
5.2. Planning Measures Evaluated PCATS is applied with the grid system to evaluate the following transportation planning measures. A. Do Nothing: No change is made to the current condition. B. Downtown Auto Restriction: Automobiles are banned from the 1.8 km by 1.6 km downtown area. This measure is represented in the simulation by eliminating all roadway links and parking areas from the downtown area. It is assumed that travelers approaching downtown by auto will park the auto outside the downtown area, then walk to the final destination. C. Transit Fair Reduction: Reduce all transit fares to one half of the current level. D. Combined Measures: Implement both downtown auto restriction and transit fair reduction. 8 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
The results of the “Do Nothing” alternative are the base against which those from the other measures can be compared.
5.3. Representing Parking Choice Behavior Simulating downtown auto restriction calls for the representation of parking choice behavior. Relatively little attention has been directed to parking location choice (see, for example, Westin & Gillen, 1978). Presumably this is at least in part due to the fact that parking location choice is difficult to address with a zone system. In the simulation of this study, the location and capacity of each of the 254 parking facilities in the study area are all coded. Thus the precise location of each parking facility is represented.8 Parking location choice, on the other hand, is represented by a set of assumptions. This is due to lack of suitable behavioral data to construct a model of parking location choice. The set of assumptions thus adopted is: 1. The auto traveler seeks the parking facility that is closest to the final destination. 2. The traveler walks from the parking location to the final destinations along a straight line at a speed of 4 km/h. 3. The total auto travel time is the sum of in-vehicle travel time from the origin to the parking facility and the walk time from the parking facility to the final destination. 4. This total auto travel time is the factor considered by the traveler in his destination and mode choice. The parcel-to-parcel auto travel time is evaluated using the method described earlier in Section 5.1. It is noted again that the prime objective of this analysis is to demonstrate that it is feasible and practical to apply the micro-simulation system of daily travel behavior, PCATS, along with a fine grid system to evaluate alternative transportation planning measures. It is hoped that more realistic behavioral models, as well as more authentic grid data, become available in the near future for increased realism.
5.4. Results of Simulation Each PCATS run took about 70 minutes on a Linux PC with Pentium II (300 Mhz) and 320 MB SDRAM. PCATS with the conventional zone system took about 7 minutes. Considering the fact that there are 740,000 parcels in the current exercise while there were only 214 zones in the previous run, the effectiveness of the MCMC algorithm would be evident. The number of person trips for non-work trips to downtown under the alternative measures is shown in Table 2. “Other” travel modes include walk and bicycle. Although the number of auto trips for non-work purposes reduces by 27.0% with auto restriction (Measure B), there is an increase in in-coming trips by public transit (presumably representing a shift from auto to public transit) and the reduction in the total number of trips is 12.36%. The table also shows that transit fair reduction (Measure C) results in an 11.56% increase in the number of transit trips to downtown, while the number of auto trips decreases by 3.94%. The total number of downtown trips increased slightly by 2.40%. This increase is largely due to the increase in trips by “other” modes, which may be due to random fluctuations in stochastic simulation.
8
There is no on-street parking in the study area.
9 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
Measure D exhibits combined effects of Measures B and C, with the most increase in the number of transit trips, but a decrease in the total downtown trips. Table 2. Comparison of Planning Measures: The Number of Non-work Trips to Downtown by Travel Mode
A. Do nothing B. Auto restriction C. Fair reduction D. Combined
Number of Non-work Person Trips to Downtown by Travel Mode Public Transit Auto Others Total 26,681 63,499 71,426 161,606 28,034 46,355 67,230 141,619 29,764 61,000 74,722 165,486 30,516 44,402 68,170 143,088
Note that the results summarized in Table 2 are obtained while simulating every pertinent aspect of activity and travel: activity engagement, the activity type, trip starting time, travel mode, destination (activity location), and the duration of the activity. It is thus assumed in the simulation that individuals may respond to these measures by not making trips at all, or by changing trip starting time, travel mode, destination, activity duration, or any combination of these. Also note that travel behavior is simulated for each individual for the duration of one day. It is believed this approach offers a more thorough evaluation of transportation planning measures. 6. Conclusion This study has illustrated the application of an MCMC algorithm to the simulation of destination choice using a multinomial logit model. The algorithm is applied with a micro-simulator of travel behavior, PCATS, along with a grid system that divides the study area into 10 m × 10 m parcels, which are used as the alternatives of destination choice. This result in a colossal choice set with approximately 740,000 alternatives. The numerical analyses of this study have demonstrated that the algorithm is accurate, the effect of initial condition diminishes quite rapidly, and the MCMC algorithm drastically reduces computational requirements. The case study shows that simulation of individuals’ daily travel behavior can be performed in a practical manner on a Pentium II PC with the grid system and destination choice sets containing as many as 740,000 alternatives. It is believed the approach presented in this study will increase the realism in simulating travel behavior, and facilitate the application of micro-simulation to a wider range of issues and problems in travel demand forecasting and policy analysis. Acknowledgments Parts of the research presented in this study were performed as the graduating thesis projects of Kei Ashikawa and Atsushi Kobata, Department of Civil Engineering Systems, Kyoto University. Their contributions to the study are gratefully acknowledged. References Ben-Akiva, M. and T. Watanatada (1981) Application of a continuous spatial choice logit model. In C.F. Manski and D. McFadden (eds.) Structural Analysis of Discrete Data with Econometric Applications, MIT Press, Cambridge, pp. 320-343. 10 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.
Chiang, J., S. Chib and C. Narasimhan (1999) Markov Chain Monte Carlo and models of consideration set and parameter heterogeneity. Journal of Econometrics, 89, 223-248. Fujii, S., A. Kikuchi and R. Kitamura (2000) A micro-simulation analysis of the effects of transportation control measures to reduce CO2 emissions: a case study in Kyoto City. Kotsu Kogaku (Traffic Engineering), 35(4), 11-18 (in Japanese). Fujii, S., Y. Otsuka, R. Kitamura and T. Monma (1997) A micro-simulation model system of individuals’ daily activity behavior that incorporates spatial, temporal and coupling constraints, Infrastructure Planning Review, 14, 643-652 (in Japanese). Hajivassiliou, V., D. McFadden and P. Ruud (1996) Simulation of multivariate normal rectangle probabilities and their derivatives: theoretical and computational results. Journal of Econometrics, 72, 85-134. Hazelton, M.L., S. Lee and J.W. Polak (1996) Stationary states in stochastic process models of traffic assignment: a Markov Chain Monte Carlo approach. In J.-B. Lesort(ed.) Proceedings of the 13th International Symposium on Tranporatoin and Traffic Theory, Pergamon, Oxford, pp. 341-357. Iida, Y., M. Iwabe, A. Kikuchi, R. Kitamura, K. Sakai, Y. Shiromizu, D. Nakagawa, M. Hatoko, S. Fujii, T. Morikawa and T. Yamamoto (2000) Micro-simulation based travel demand forecasting system for urban transportation planning. Infrastructure Planning Review, 17, 841-847 (in Japanese). Kawata, H., Y. Iida and Y. Shiromizu (1999) Case study of evaluation for comprehensive transportation policy. The Proceedings of the Infrastructure Planning Review Annual Meeting, 22(1), 511-514 (in Japanese). Kikuchi, A., S. Fujii and R. Kitamura (2001) Evaluation of transportation policies by micro-simulation of individuals’ behaviors on a coordinates system. City Planning Review, 36, 577-582 (in Japanese). Kikuchi, A., A. Kobata, S. Fujii and R. Kitamura (2000) A mode and destination choice model on a GIS database: from zone-based toward coordinates-based methodologies of spatial representation. Infrastructure Planning Review, 17, 841-847 (in Japanese). Kikuchi, A., T. Yamamoto, K. Ashikawa and R. Kitamura (2000) Computation of destination choice probabilities under huge choice sets: application of Markov Chain Monte Carlo algorithms. Infrastructure Planning Review, 18(4), 503-508 (in Japanese). Kitamura, R. and S. Fujii (1998) Two computational process models of activity-travel behavior. In T. Gärling, T. Laitila and K. Westin (eds.) Theoretical Foundations of Travel Choice Modelling, Pergamon Press, Oxford, pp. 251-279. Kitamura, R., S. Fujii, A. Kikuchi and T. Yamamoto (1998) Can TDM make urban transportation “sustainable”?: A micro-simulation study, Paper presented at International Symposium on Travel Demand Management, Newcastle, UK. Kitamura, R., S. Fujii, T. Yamamoto and A. Kikuchi (2000) Application of PCATS/DEBNetS to regional planning and policy analysis: Micro-simulation studies for the Cities of Osaka and Kyoto, Japan. In the Proceedings of Seminar F, European Transport Conference 2000, pp. 199-210. Kitamura, R., A. Kikuchi, S. Fujii and T. Yamamoto (2002) An overview of PCATS/DEBNetS micro-simulation system: its development, extension, and application to demand forecasting. Paper to be presented at the International Symposium on Transportation Simulation, Yokohama, August. Westin, R.B. and D.W. Gillen (1978) Parking location and transit demand: a case study of endogenous attributes in disaggregate mode choice functions. Journal of Econometrics, 2, 1-16. Yamamoto, T., R. Kitamura and K. Kishizawa (2001) Sampling alternatives from a colossal choice set: an application of the MCMC algorithm. Transportation Research Record, 1752, 53-61. 11 TRB 2003 Annual Meeting CD-ROM
Paper revised from original submittal.