AbstractâReduction of noise is a growing subject of interest in the automotive industry, especially in tire manufacturing. After construction of the basic tire design ...
Tread Profile Optimization For Tires With Multiple Pitch Tracks Matthias Becker, Sebastian Jaschke and Helena Szczerbicka Leibniz University Hannover FG Simulation and Modeling Hannover, Germany Abstract—Reduction of noise is a growing subject of interest in the automotive industry, especially in tire manufacturing. After construction of the basic tire design, that is design of the material and the basic building blocks called pitches, the last step in noise engineering of a tire is the determination of the pitch sequence of a tire. In this step the different types of pitches are put together regarding several constraints. Since there are a combinatorial number of valid pitch sequences, the goal is to find a valid pitch sequence with optimal noise characteristics. Due to the complexity of the problem, the globally optimal pitch sequence cannot be found by exhaustive search and intelligent algorithms such as Heuristic Optimization Algorithms, have to be used in order to find at least a locally optimal pitch sequence. Several successful approaches for this problem can be found in the literature for tires consisting out of just one pitch sequence. In this work tires consisting out of multiple pitch sequence (several tracks) are considered. We show how we can use algorithms for single track optimization and how we can combine them best for finding noise optimal tire designs for multiple pitch track tires. Index Terms—Tire Optimization, Noise, Multiple Pitch Tracks
I. I NTRODUCTION In tire industry one of the last steps in tire design is the determination of the pitch sequence. The pitches are the elementary building blocks of a tire. In the early phases of the tire design, the number of different pitch types and their shape and size are determined so that the requirements concerning adhesion, abrasion, stability, etc. are met. After that, the pitches are put together to a pitch sequence. The pitch sequence has to obey certain constraints (e.g. concerning minimal/maximal number of different pitch types, neighborhood between certain types etc.). The goal is to find a pitch sequence, that fulfills the constraints and that is expected to produce a low, unobtrusive noise inside the car. Though the noise design comes after determination of the basic functional properties, the noise characteristics are an important marketing issue. The subjective impression of the quality of a car is highly influenced by a nice low sound inside the car. This lets the car appear comfortable and of high quality, thus car manufacturers are interested to choose a tire for their cars that makes them appear more valuable. It is therefor important for tire manufacturers to design low noise tires, in order to get a share of the large market of supplying car manufacturers.
978-1-4244-4113-6/09/$25.00 ©2009 IEEE
125
II. T ERMS
AND
D EFINITIONS
In this section we define the necessary terms connected with tire manufacturing and tread profile design. A tread profile consists of a pattern of elementary building blocks called pitches (usually an elevated part followed by a ’hole’). There is a set of different pitch types (two to approx. ten different types). Pitches of different types normally have the same structure, but vary in their length. The length is usually given as a length ratio, the first pitch type is assigned length 1, the second e.g. length 1.1 etc. Typically a tread profile consists out of 50 to 70 pitches. This is called a ’pitch sequence’ (of length n). Definition: A pitch is defined as the elevated block plus the following space (lateral groove). Each pitch type has a constant length (fig. 1), the length is given relative to the first pitch type (which is defined to have length one). Definition: A tread profile consists out of a sequence of different pitch types. the so called pitch sequence. Definition: A multiple track tire consists out of several pitch sequences, that is one pitch sequence per track. A tire model consists out of n independent tracks, where each track consists out of a number of pitch types and has an individual length and constraints, such as: • • • •
minimum number of pitches of each pitch type (Min#) maximum number of pitches of each pitch type (Max#) maximal successive occurrence of the same pitch type (Max sequence) pitch types which must not be neighbors (No pairs with pitch)
Fig. 1.
Measures of a pitch
III. N OISE M ODEL There are too many factors to obtain an exact noise model of a tire on the street, so that an abstract model of the tire noise reproducing the main characteristics of the noise, is used here. This abstract model is based on the fact that the main origin of the noise is the pitching and lifting of the pitches on the ground, resulting in a periodic noise pattern. Other factors influencing the noise such as the profile of the ground, shaping of the tire through pressure, dependence of the rubber compound, stiffness and unbalance [1] are not considered here. Noise directly originating from the tread profile has three main sources [1]: • pitches hitting and lifting off the ground let the tread oscillate • sliding and stumbling and release of tension let the pitch oscillate • air compression between the pitches causes air oscillations between the pitches and noise when the air can escape. The noise model that is used here assumes that most noise is generated in the groove. The rolling tire thus generates a periodic acoustic signal which has a positive constant amplitude when the groove hits the ground and zero elsewhere. A. Fourier Analysis This periodic noise signal f (x) can be analyzed with by Fourier transformation. The Fourier expansion s(x) of f (x) is the sum of the trigonometric functions n
s (x) =
a0 � An sin(ωx + ϕn ) + 2 i=1
(1)
[2] It is: Ak =
� a2k + b2k
tan ϕk =
ak bk
(k = 1 . . . n)
(2)
(k = 1 . . . n)
ak and bk are the Fourier coefficients for the function f (x) calculated as follows: Let li be the length of the i-th pitch and 0 < q < 1 the relative proportion of the groove from the pitch length. The perimeter T is the sum of all pitch lengths, where the pitch breadth c is constant. With M1 := kωl1 ,
Mi+1 := Mi + kωli+1
Ni := Mi − kωqli where = calculated.
T 2π ,
n c � bk = (cos Ni − cos Mi ) πk i=1
(i = 1, 2, . . . , n)
(4)
the Fourier coefficients ak and bk can be
126
(5) (6) (7)
With (2) this leads to: �� �2 � n �2 � n � � c � � Ak = (sin Mi − sin Ni ) + (cos Ni − cos Mi ) πk
i=1
i=1
The Ak s are the spectrum of the noise signal, the value of a specific Ak is the amplitude of the corresponding frequency. The goal is to achieve a spectrum that resembles white noise. A spectrum with one or more distinct peaks are not comfortable, since that means that one dominant tone will be heard, changing frequency with speed. For analysis of a multiple track tire design, the Fourier coefficients for each track are calculated separately and the resulting spectrum for the tire is calculated as sum of all track spectra. The goal of the optimization is to find a tire design with has the lowest maximum in the tire spectrum. IV. P REVIOUS W ORKS In previous works [3], [4] the problem of finding noise optimal pitch sequences has been tackled using Heuristic Optimization Algorithms (such as Genetic Algorithms, Hill Climbing, Simulated Annealing, c.f. standard literature such as [5]) . In [6] an approach has been used that uses Neural Networks to learn how to construct a tire with n + 1 pitches when a tire with good acoustic properties with size of n pitches is known. [7] contains an optimization with variable pitch sizes, which yielded very good results concerning the reduction of noise. Despite modern production facilities today, it was not feasible to employ variable pitch sizes into the production process. All previous mentioned works are concerned with tires that consist out of a single pitch sequence. In this work we consider tires with multiple pitch tracks, that means that several different pitch sequences lie side by side on the tread and constitute the tire design. In the next section we will give a concise description of the case where the tire is made of only one pitch sequence. Afterwards we will explain what is needed to do the multiple track optimization.
(i = 1, 2, . . . , n − 1) (3)
and
1 ω
n c � (sin Mi − sin Ni ) ak = πk i=1
V. S INGLE T RACK C ASE
A tread profile (or the corresponding pitch sequence of length n) can be represented by an n-dimensional vector (see fig. 2), thus the problem can be mathematically formulated as a search in an n-dimensional vector space. Let k be the number of different pitch types, then the number of different possible pitch sequences is equal to k n . Such search space
A1
t
}
} }
}
}
( 1, 2 , 1 , 1 , 2, ... ) A2
... Fig. 2.
Mathematical representation of a tread profile
1
2 2
1
2
1 2
2 2
2
rotational symmetry
2
2 2
2
1
2
1
2
Square function and Fourier spectrum
2
2
1 1
Fig. 3.
Fig. 4.
2
1
2
2
1
mirror symmetry
1
FK
2 1
2 2
1
Symmetry of pitch sequences
Furthermore there are a number of constraints to be taken into account. Common constraints on pitch sequences are a maximal number of pitches of the same time in series, or how many pitches of each type should occur in a pitch sequence maximally/minimally, etc. B. Efficient analysis of a pitch sequence
is too large for an exhaustive search in a reasonable amount of time, even with todays computers. The pure generation (without evaluation) of sequences reaches rates of millions of pitch sequences per second, however even at this rate the complete search would last thousands of years. A. Efficient generation of pitch sequences The prediction of the noise characteristics of a pitch sequence is done by spectral analysis using the Fourier transform (cf. e.g. [8] or any mathematical standard literature). Roughly the noise model assumes that each pitch issues a noise impulse when hitting the ground. The details of the noise model vary among the tire manufacturers and are confidential or covered by patents (e.g. tire designs where the individual pitch lengths do not have a common divisor, or are prime numbers, EP 0118059/13.02.84, EP 0246996/14.05.87). Some works about details of noise models have been published at international conferences such as the regular ’Internoise’, or on national workshops (cf. e.g. [9] for a study of physical mechanisms of noise generation by moving tires on the road.) Since the noise model results in a periodic function whose spectrum is then analyzed, two rotational symmetric pitch sequences result in the same spectrum. Furthermore the noise spectrum remains the same, if the tire is moved forward or backward, or in other words, two pitch sequences that are mirror symmetric result in the same noise spectrum (see fig. 3). Thus for efficiency, it is enough to generate only one representative pitch sequence for each equivalence class of rotational and mirror symmetry. Algorithms for that can be found in mathematical books of permutation theory, under the keyword ’bracelet’ and ’necklace’, e.g. in [10]. Other keywords are ’Lyndon word’ (= an aperiodic necklace representative). It is important to use an algorithm that produces exactly one (and only one) representative of each equivalence class, instead of e.g. generating all sequences and checking for symmetry afterwards, and throwing equivalent sequences away then.
127
The assessment of the quality of a given pitch sequence (analysis) is based on Fourier analysis, i.e. the noise spectrum of the tire is estimated. The noise model for a pitch sequence is an irregular rectangular function, that results in an impulse function, if discretized via sampling. Fourier analysis of that function yields the frequency spectrum, i.e. the value of the Fourier coefficients that indicates how much the corresponding frequency contributes to the overall sound. Since the noise of pitch sequences are roughly rectangular functions (see upper part of fig. 4), the noise spectrum of a sequence has the peak around the Fourier coefficient equal to the number of pitches, and sub-peaks at multiples of it (harmonics) (see lower part of fig. 4). Ideally there should not be one peak frequency but the energy of the noise should be distributed rather equally over all frequencies. 1) Evaluation order of Fourier coefficients: Since we are interested in a pitch sequence that has the lowest maximal Fourier coefficient (that mostly is located around the basic period equal to the pitch sequence length) one obvious improvement of efficiency is not to calculate the Fourier coefficients from 1 to lets say 200, but to start with the nth Fourier coefficient, then evaluate n + / − 1 etc. (given a pitch sequence length of n). 2) Sine table: The calculation of each Fourier coefficient is a sum of sines. We achieve a significant speed up when using a table with pre-calculated values for sines, instead of calculating each value again and again with much too high precision. 3) Re-use of partial sums: If pitch sequences are enumerated, so that the ith pitch sequence differs only in one or two digits from the i − 1th, then we can re-use most of the calculations/of the sum evaluated for the ith sequence. This measure also increase efficiency a lot. Note that this is not possible if pitch sequences are generated randomly.
Fig. 5.
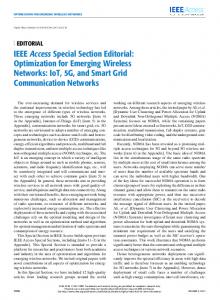
Comparison of track-wise vs tire-wise optimization
VI. M ULTIPLE T RACK O PTIMIZATION In many cases a tire consists of only one pitch sequence as described in the last section, so that each pitch extends over the complete breadth of the tire. The newer tire designs consist of more than one pitch sequence (then called track): several pitch sequences lie side by side. Cf. fig. 6 where on the left side a tire with only one pitch sequence is shown, while on the right side a tire with two tracks can be seen. For each of such tracks all properties (number or length of pitch types, constraints, etc.) of the individual pitch sequence are independent of each other, except the diameter of course.
optimization (right side, noise value 8.0 for the whole tire, noise values for single tracks 7.10 and 6.53). VII. G ENERATION
AND
O PTIMIZATION OF T IRE D ESIGNS
We use Hill Climbing (HC) as basic heuristic optimization algorithm here, since there are quite some non-local constraints for the track and tire designs, so that other, more complicated optimization algorithms such as Genetic Algorithms showed problems when generating new sequences that obey the constraints. Since Hill Climbing has the problem of getting stuck in a local optimum, the Hill Climbing algorithm should be applied several times by generating a larger number of random start points. Hill Climbing is used for both track and tire optimization. In both cases, the goal is to minimize the value of the maximal Fourier coefficient. In the following sections we present the algorithms we developed for multiple track optimization. A. Random Tire Generator
Fig. 6. Tire consisting of one pitch sequence on the left, and tire with two tracks on the right
A simple approach to design a tire with multiple tracks is to optimize the pitch sequence of each track in isolation. This approach yields at least good designs in many cases, however very often the combination of two individually only suboptimal tracks may lead to a better result than two individually optimal tracks, see fig. 5. One can see, that the independent optimization of the two tracks (left side) leads to better noise values for each track in isolation (max. peak at 6.47 and 4.84) but a worse noise value for the whole tire (9.26), compared to the tire-wise
128
In order to generate one tire model for a tire with n tracks, the Random Tire Generator (RTG) generates for each of the n tracks a random pitch sequence, checks the constraints and calculates the noise spectrum for each track. Each generated pitch sequence is optimized using the Hill Climbing algorithm. The tire spectrum is then calculated by adding the track spectra. Optionally the resulting tire model can be optimized again using the Hill Climbing algorithm. By this approach, tire models can be generated randomly and compared with the up to then best tire spectrum, as long as there is computation time. Whether to intermediately use the Hill Climber or not depends on the time available for calculation. When using the RTG without Hill Climbing, the results are of medium quality, however the RTG works quite fast. SectionVIII will show that using intermediate track optimization will not always result in better tire spectra. The final fine-tuning of the tire spectrum mostly leads to an improvement in acceptable time.
B. Precalculation Tire Generator Opposed to the RTG, the Precalculation Tire Generator (PTG) randomly generates a pool of p valid pitch sequences for each of the n tracks. These track sequences can be optimized using the Hill Climber, depending on time constraints. Only if the quality of the track spectrum is of a minimum quality the track sequence will be added to the pool. For these n pools of p track sequences, all possible tire designs (pn ) are generated and the tire spectrum is calculated and optimized using the Hill Climber. Thus only n × p track spectra have to be analyzed for obtaining an overall of k = pn tire spectra, whereas the RTG needs k × n track spectrum analysis for the same amount of k tire spectra.
and tire optimization even saves time. That is due to the fact, that only tracks are added to the pool when they have a certain minimum quality. This quality is reached faster when using a HC instead of random generation. The variance of the runtime was very low.
PTG Track&Tire HC PTG Tire HC PTG Track HC Pure PTG RTG Track&Tire HC RTG Tire HC
VIII. R ESULTS
RTG Track HC
In order to asses the results several replications are necessary due to the random nature of the generators. The test case was a tire with two tracks. Both tracks have three different pitch types each, for all pitch types there was a maximum sequence constraint of five pitches of the same type in a row. The first track consists of 33 pitches, each pitch type should occur between minimally five and maximally 15 times. The second track has sequence length of 72, pitch types one to three have the minimum occurrence of 15, 13 and 11 and maximum occurrence of 35, 32 and 11. For comparability, each algorithm was allowed to find 900 tire designs altogether. That is 900 random tire designs for the RTG and a pool of 30 tire designs for the PTG, which makes also 30 × 30 = 900 tire designs.
Pure RTG 0
1
2
3
4
5
6
7
8
9
10
Minimal Peak
Fig. 8.
Best result of ten runs
It can be seen in fig. 8 that the time consuming deployment of the HC at least increases the quality of the best found tire. The best results can be expected to be found with PTG with no track optimization but final tire optimization. It seems that having a broader (more random) base of track sequences is advantageous for obtaining a good combined tire spectrum. IX. C ONCLUSION
PTG Track&Tire HC PTG Tire HC PTG Track HC Pure PTG RTG Track&Tire HC RTG Tire HC RTG Track HC Pure RTG 0
5
10
15
20
25
30
Minutes
In this work we showed how to tackle the complex problem of multiple track tire optimization. Even the noise optimization of tires consisting out of only one pitch sequence is a combinatorial problem which not only has a huge search space but also a lot of local and non-local constraints are involved. This complexity multiplies when finding multiple track tires with good noise properties. We presented a practical approach in this paper. Our approach produces tire designs of good quality within a reasonable amount of time. Typically the practitioners need a decision over night or sometimes over the weekend. As result our powerful algorithms are currently evaluated in tire industry in order to produce valid and noise reduced multi track tires. R EFERENCES
Fig. 7.
Mean runtime
Regarding the mean runtime (fig.7) one can observe that the additional deployment of the optimization algorithm generally needs significantly more time than just random generation. Interestingly, the runtime of the RTG using the Hill Climber either for track or for tire optimization nearly doubles, when the HC is used for both, track and tire optimization. This is opposed to the PTG, where the deployment of the HC for track
129
[1] D. Vincken (translator) Societe de Technologie Michelin F-ClermontFerrand, Der Reifen Komfort - mechanisch und akustisch, First German Edition. Michelin Reifenwerke KGaA, Karlsruhe, 2005. [2] I. Bronstein et al, Taschenbuch der Mathematik. Frankfurt am Main, 2006. [3] M. Becker and H. Szczerbicka, “Intelligent Reduction of Tire Noise,” LECTURE NOTES IN COMPUTER SCIENCE, vol. 4251, p. 706, 2006. [4] M. Becker, “Genetic Algorithms for Noise Reduction in Tire Design,” IEEE International Conference on Systems, Man and Cybernetics, 2006. SMC’06., vol. 6, 2006. [5] Z. Michalewicz and D. Fogel, How to solve it: Modern Heuristics. Springer, London., 1999.
[6] M. BECKER, “NEURAL NETWORKS AND OPTIMIZATION ALGORITHMS APPLIED FOR CONSTRUCTION OF LOW NOISE TREAD PROFILES,” Cybernetics and Systems, vol. 38, no. 5, pp. 535–548, 2007. [7] P. Seifert, “Heuristische Optimierungsverfahren und deren Anwendung auf die Ger¨auschentwicklung rollender Gegenst¨ande,” Diplomarbeit University Hannover, 2000. [8] W. Briggs and V. E. Henson, The DFT. SIAM, Philadelphia, 1995. [9] T. Beckenbauer, “Reifen-Fahrbahn-Ger¨ausche – Minderungspotentiale der Strassenoberfl¨ache,” in Proceedings of the ’Deutsche Arbeitsgemeinschaft f¨ur Akustik’ (DAGA 03), Aachen, Germany, 2003. [10] F. Ruskey, “Combinatorical object server,” http://www.theory. csc.uvic.ca/ cos/inf/neck/NecklaceInfo.html, 1995-2003.
130