IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, VOL. 2, NO. 3, JULY 2011
215
Multiple Model Predictive Control for Wind Turbines With Doubly Fed Induction Generators Mostafa Soliman, Member, IEEE, O. P. Malik, Life Fellow, IEEE, and David T. Westwick, Member, IEEE
Abstract—A multivariable control strategy based on model predictive control techniques for the control of variable-speed variable-pitch wind turbines is proposed. The proposed control strategy is described for the whole operating region of the wind turbine, i.e., both partial and full load regimes. Pitch angle and generator torque are controlled simultaneously to maximize energy capture, mitigate drive train transient loads, and smooth the power generated while reducing the pitch actuator activity. This has the effect of improving the efficiency and the power quality of the electrical power generated, and increasing the life expectancy of the installation. Furthermore, safe and acceptable operation of the system is guaranteed by incorporating most of the constraints on the physical variables of the wind energy conversion system (WECS) in the controller design. In order to cope with nonlinearities in the WECS and continuous variations in the operating point, a multiple model predictive controller is suggested which provides acceptable performance throughout the whole operating region. Index Terms—Doubly fed induction generators (DFIGs), predictive control, wind power generation.
I. INTRODUCTION
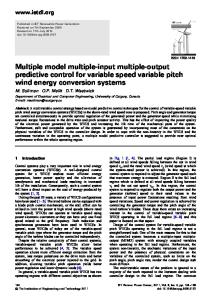
Fig. 1. Ideal power curve for a WECS.
C
ONTROL systems play a very important role in modern wind energy conversion systems (WECSs). A well-designed WECS control system enables efficient energy generation, good power quality, and the alleviation of aerodynamic and mechanical loads resulting in increased life of the installation. Consequently, such a control system will have a direct impact on the cost of energy produced [1], [2]. In general, a variable-speed variable-pitch WECS has two operating regions, as shown in Fig. 1 [1]. The partial load regime includes all wind speeds between the cut in wind speed, , and the rated wind speed, (wind speed at which the system rated power is achieved). In this region, the control system should adjust the turbine rotor speed such that maximum energy is exand below the cut tracted. When the wind speed is above , the turbine is operating in the full load out wind speed, regime. In this region, the control system should regulate the output power and the generator speed at their rated values. The design of WECS control systems is not a straightforward task. One of the main reasons for this is that the system is a multiple-input–multiple-output (MIMO) system with strongly Manuscript received March 13, 2010; revised March 06, 2011; accepted April 08, 2011. Date of publication May 12, 2011; date of current version June 22, 2011. This work was supported by the Alberta Ingenuity Fund (File 200800408). The authors are with Electrical Engineering Department, University of Calgary, Calgary, AB, T2N 1N4, Canada (e-mail:
[email protected];
[email protected];
[email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TSTE.2011.2153217
coupled variables. Furthermore, the system nonlinearity, the stochastic variations of the input power, and the presence of physical constraints on the system’s variables render the control design task more difficult. Many control techniques have been proposed to control WECSs in the partial load regime [1], [4]–[8]. The design of classical proportional integral (PI) controllers is described in [4], [5], and [8]. To cope with the system nonlinearity, the use of a gain-scheduling linear quadratic Gaussian (LQG) controller controller is proposed in [6]. A gain scheduled is suggested in [1] and [7]. Many papers focusing on the control of variable-speed variable-pitch WECSs operating in the full load regime have appeared recently [8]–[10]. Most of the work reported ignores the multivariable nature of the problem [8], [9]. Classical PI controllers are used in [8]. A PI controller in the power loop and an adaptive self-tuning regulator in the speed loop are proposed in controller is proposed [9]. A multivariable gain scheduled in [10]. The use of model predictive control (MPC) techniques to control the WECS in the full load regime is proposed in [11]. The presence of two control regions with different control structures requires the ability to switch between these controllers. Several recent studies indicate that when wind speed fluctuates around its rated value, undesirable drive train transient loads and power overshoots can occur [1]. This paper is motivated by the desire to develop an overall control strategy that can work in both partial and full load
1949-3029/$26.00 © 2011 IEEE
216
IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, VOL. 2, NO. 3, JULY 2011
Fig. 3. WECS model. Fig. 2. DFIG-based WECS and its control system.
B. Control System Hierarchy regimes. Furthermore, as discussed in [1] and [10], recognizing the multivariable nature of the problem and designing a MIMO controller will lead to much superior performance as compared to the decentralized approach commonly used in the literature. To the knowledge of the authors, the only work that describes the design of a multivariable controller that can work in both partial and full load regimes is found in [1] and [12], where a controller is proposed. multivariable gain scheduled A new control strategy based on MPC techniques is proposed to control variable-speed variable-pitch WECSs in both partial and full load regimes. The paper focuses on the doubly fed induction generator (DFIG) configuration since it is the most popular type used today. The proposed strategy is a multivariable method that uses the full capability of the system to obtain the desired performance in the whole operating region of the WECS, while keeping the system variables within safe limits. Some preliminary work related to the proposed MPC control strategy was presented in [11] and [13]. This paper extends [11] and [13] by designing a controller for the whole WECS operating region (partial load and full load regimes). Furthermore, a systematic way to damp drive torsional torque oscillations is proposed and more detailed simulation studies, including the DFIG dynamics when interconnected to a small distribution power network, are carried out.
Due to large differences in the time scales of the electrical and mechanical dynamics, the DFIG-based WECS has a multilayer control structure as shown in Fig. 2. The highest control level is the WECS optimization level. At this control level, a maximum power point tracking (MPPT) algorithm [2] is used to calculate the generator speed set point so that the energy conversion efficiency is maximized in the partial load regime. In the full load regime, this control level generates , and the DFIG output power set point so that the generator speed and power are regulated to their rated values. The second control level contains the turbine controller. This control level supervises the pitch control system and the generator controller. The task of the turbine controller is to control the generator speed and output power to follow their desired values. This is achieved by manipulating the pitch angle set point and the generator torque set point . The third control level contains the generator controller. This controller regulates the generator torque, the stator reactive power, the GSC reactive power, and the dc link voltage to follow their set points , , , and , respectively, by controlling the RSC and the GSC. This paper will focus on the design of the turbine controller using model predictive control techniques.
II. OVERVIEW OF DFIG-BASED WIND TURBINES
III. MODELING OF DFIG-BASED WECSs
A. The DFIG System A DFIG-based WECS consists of a three blade wind turbine rotor coupled to a wound rotor induction generator (WRIG) through a gear box. The rotor winding of the WRIG is connected to a back-to-back voltage source converter, as shown in Fig. 2. The back-to-back converter consists of the rotor side converter (RSC) and the grid side converter (GSC), connected with a direct current (dc) link.
A model of the entire WECS can be structured as several interconnected subsystems, as shown in Fig. 3 [1]. Details of individual blocks are given in Appendix A [1]–[5] and [14]. A. Effective Wind Speed Model A realistic wind speed model is necessary for the assessment of the proposed control strategy. In this paper, the effective wind , described by (1), is composed of two components, speed
SOLIMAN et al.: MULTIPLE MODEL PREDICTIVE CONTROL FOR WIND TURBINES WITH DFIGs
the slowly varying component and the turbulent component . The turbulent component is obtained by fil, tering a white noise signal by three cascaded filters , and . The filter is used to approximate the von Karman spectrum [1]. To include the effect of the blades’ rotation in a nonuniform wind speed field, a low-pass is used to attenuate the high-frequency spatial filter components of the turbulence, and the rotational sampling filter is used to amplify those components with frequencies close to triple the turbine speed (3P frequency). Details of these filters are given in [1], [15], [16] (1)
217
The symbol is used to represent the deviation of a variable from its operating point value while the over bar in denotes the value of a variable at the operating point. and are dependent on , Since the steady-state values as shown in Fig. 1, the WECS operating point is completely defined by [1]. The linearized state space model of the WECS can be written as (6)–(8), shown at the bottom of the page. is the state Here, vector, is the control input, and is the measured output. It can be seen that the system is MIMO and that the system dynamics vary when the average wind speed varies. IV. CONTROL PROBLEM DESCRIPTION
B. Simplified WECS Model For turbine controller design, it is important to use simple models that capture the relevant dynamics of the system. Fortunately, the dynamics of the electrical subsystem are much faster than the turbine dynamics and simple models can be used to represent the electrical dynamics. In this paper, a first-order model, given in (2) and (3), is used (2) (3) Here, , , and are the generator torque, time constant, and efficiency, respectively. Despite this simplification, the resulting simplified WECS model described in (A.1)–(A.8) and (2), (3) is nonlinear. Linearizing the turbine torque equation in (A.3) yields
(4)
(5)
There are three main control objectives of WECS control systems. First, the control system should maximize the energy capture. Second, transient loads should be minimized, consequently maximizing the life expectation of the installation. Third, voltage flicker emissions should be reduced thus enhancing the power quality [17]. In the partial load regime, the primary objective is to control the turbine rotor speed to maximize the turbine’s aerodynamic and fixing efficiency. This is achieved by manipulating at its optimal value (usually very close to zero). The main control challenge is to design a controller that can maximize the conversion efficiency while minimizing transient loads. It was found that there is a conflict between these two objectives and a trade-off must be decided [6]. In the full load regime, the main control objective is to reguand the generator speed late both the DFIG output power at their rated values and , respectively. One of the main challenges in this regime is the presence of severe fluctuations in the turbine power caused by erratic variations in the wind speed. Fluctuations in can lead to large variations in the drive train torsional torque and in the electric power supplied to the grid. These, in turn, can cause a reduction in the lifetime of the WECS components and flicker problems [8], [9]. A common challenge in both partial and full load regimes is the presence of nonlinearity in the system dynamics and the
(6)
(7)
(8)
218
IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, VOL. 2, NO. 3, JULY 2011
continuous variation of the operating point. Another challenge is the presence of cyclic aerodynamic torque variations at triple the speed of rotation of the wind turbine blades. This frequency is normally referred to as the 3P frequency [17]. This phenomenon, known as the rotational sampling effect [1], is caused by the blades crossing a nonuniform wind field. These cyclic torque variations can increase dynamic loads and increase the voltage flicker. Finally, the control system should realize all the control objectives while keeping system variables within acceptable limits. For example, there are maximum limits on the amplitude and speed of the pitch servos, the generated power, and the turbine speed. Ignoring such constraints during the controller design can lead to performance degradation [18] and, in the worst case, system shutdown.
Fig. 4. MPC concept.
V. CLASSICAL WECS CONTROL STRATEGY The classical wind turbine control strategy [12] relies on using a set of two PI controllers to regulate the generator speed in the partial and full load regimes, respectively. In partial load operation, is fixed at zero and is manipulated by the first PI controller so that the generator speed tracks . In the full load regime, is fixed at its rated value, , while is manipulated by the second PI controller to regulate the generator speed at its rated value. In order to take into account variations in the aerodynamics, these PI controllers are generally gain scheduled. The main shortcomings of this classical strategy are explained as follows. In the partial load regime, the PI controller design does not allow fine tuning of the trade-off between energy maximization and transient load minimization [2]. Furthermore, when the system is operating near the rated wind speed, significant power and drive train torsional torque overshoots occur due to switching between the partial load and full load control configurations [1]. Finally, in the full load regime, using the pitch actuator alone to regulate the generator speed can cause large pitch activity and severe power fluctuations. VI. PROPOSED CONTROL STRATEGY A. Review of Model Predictive Control Model-based predictive control (MPC) has been successfully used in many industrial applications due to its ability to handle MIMO control problems with constraints on the system variables [18]–[20]. The basic idea behind MPC can be explained as follows. First, a dynamic model of the system to be controlled and the physical constraint specifications on system variables must be known. At each sampling time, the future outputs of the system are predicted within a predefined prediction horizon. The set of future control signals is calculated by solving a constrained optimization problem involving the system constraints and a user defined performance index that reflects the system performance. The first input in the optimal sequence is then sent to the system, and the entire calculation is repeated at subsequent control intervals with shifted prediction horizons. This idea is illustrated in Fig. 4.
Fig. 5. Proposed control strategy using MMPC.
The main drawback of using MPC controllers is the requirement to solve a quadratic programming (QP) problem on line. This has restricted the use of MPC to applications with slow dynamics. However, due to the advances in computational power and in optimization algorithms, MPC can be used now for systems with fast dynamics [19]. B. Multiple Model Predictive Control (MMPC) for Variable-Speed Variable-Pitch WECSs The proposed MMPC-based WECS control strategy is shown in Fig. 5. The main idea is to use a multivariable MPC controller at the turbine control level to control the WECS behavior by manipulating both and . WECS constraints, such as limits on the pitch angle magnitude, pitch angle rate, the generated power and the turbine speed, are explicitly incorporated in the MPC controller. To cope with WECS nonlinearities and the continuous variation in the operating point, the whole operating region of the WECS is divided into operating subregions with linearized models that adequately represent the local system dynamics within each subregion. A linear MPC controller based on each model is designed. Finally, a criterion by which the control system switches from one controller to another as operating conditions change is defined. This approach is known in the literature as MMPC [21], [22]. The main components of the proposed MMPC strategy are the prediction model bank, the optimization solver, the state estimator, and a model switching criterion [18], [20].
SOLIMAN et al.: MULTIPLE MODEL PREDICTIVE CONTROL FOR WIND TURBINES WITH DFIGs
1) Prediction Model Bank: A model bank (9), consisting of linearized models that represent the WECS dynamics in the whole operating region shown in Fig. 1 must be available
219
given the data up to time , the MMPC controller solves the quadratic optimization problem given by (15)–(18)
(15) (9)
(16)
For the case of the WECS described in Section III, the con, the state vector , and the controlled trol input vector measurement vector of model in (9) at the sampling instant are defined in (10)
(17) (18-a) (18-b) (18-c) (18-d) (18-e) is the control horizon, is the tracking error, and , are defined in (10). The control move, , is defined as . The symbol denotes a weighted norm and denotes the maximum (minimum) dynamical limit of . Knowing and the actual physical limits, and the limits and can be calculated. The weights , , and are defined as Here,
(10) In the case of the WECS, one of the control objectives besides the tracking/regulation of the measurements is to damp highfrequency oscillations in the drive train torsional torque . In the optimal control framework, this is achieved by defining an unmeasured controlled signal , as in (10), and by including this signal in the objective function of the optimization problem [23]. The fictitious unmeasured disturbance is used to represent the effect of actual unmeasured disturbances and it is modeled as the output of the system (11), where is assumed to be Gaussian white noise
(11) , , and in (9) with sampling peThe matrices , riod are computed from the continuous plant model in (6) at different wind speeds , using (12) and (13), where and denote the third row in and , respectively,
is the prediction horizon,
(19) where
.
Using the MPC formulation in (15)–(18), there are six weights, , , , , , and , that can be tuned by the designer to reach the desired compromise between different control objectives. Details of weight selection for partial and full load regimes are provided in Section VI-C1. 3) State Estimation: In this paper, the state estimates are computed using an observer bank consisting of state observers in (20) and (21)
(12) (13)
(20)
Combining (9) and (11), the augmented prediction model bank used in the MPC formulation is given by (21)
(14) 2) Optimization Problem: Assuming knowledge of the estimates of the plant states and disturbance states
is designed using Kalman filtering techniques The gain [20] based on model in (14). 4) Bumpless Switching Between Different MPC Controllers: The switching between different MPCs is based on the value of a scheduling signal as shown in Fig. 5. In the case of a WECS, the scheduling signal can be the generator speed and pitch angle or an average wind speed estimate which can be determined online
220
IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, VOL. 2, NO. 3, JULY 2011
by filtering the wind speed measured by an anemometer located at the wind turbine [10], [12]. Due to wind speed fluctuations, it is important to ensure bumpless switching between different MPC controllers. This is ensured by 1) using an MMPC algorithm that calculates only the control increments, and , and 2) by continuously updating the internal state of all estimators in the estimator bank. This reduces the transients in the state estimates when switching between MCP controllers.
However, this is not the case in this paper due to the presence of a term containing the unmeasured controlled output in (15). Appendix C provides a proof that at steady state, the MPC controller used in this paper is equivalent to the one in [24], and therefore, offset free tracking is guaranteed for the proposed MPC strategy. 3) Partitioning the Whole Operating Region Into Operating Subregions: The proposed MMPC control strategy is based on partitioning the whole operating region into operating subregions as shown as follows:
C. MMPC Tuning for Variable-Speed Variable-Pitch WECSs 1) MMPC Weight Selection: In the proposed MMPC strategy, the whole operating region is partitioned into subregions. For subregions corresponding to partial load operation, the weights and in (15) should be set to large values to force the pitch angle set point to be fixed at zero. Since the objective is to force the generator speed to track its set point, the weight should be set to zero while the weights and in (15) should be selected to achieve the desired trade-off between energy maximization and drive train transient load minimization. The desired damping of oscillations in the drive train torsional torque can be achieved by tuning . For subregions corresponding to partial load operation near the rated wind speed, the weights , , , and should be selected similar to those used in subregions corresponding to partial load operation. However, the weights and should be reduced in comparison with subregions corresponding to partial load operation and the constraint (18-e) should be replaced with (22). This selection allows the pitch system to be activated when required to prevent the power from exceeding its rated value when the wind speed fluctuates near the rated wind speed. Consequently, power and drive train twist torque overshoots above their rated values are eliminated (22) For subregions corresponding to the full load regime, the weight should be set to zero to allow the pitch angle to take any required value. The weights , , , and are tuned to achieve the desired trade-off between generator speed regulation, power smoothing, drive train transient loads reduction, and pitch angle activity, respectively. 2) Disturbance Model Selection: The disturbance model in (11) is chosen to guarantee offset free tracking for the WECS [24]. This property ensures that when the system reaches steady state, the controlled variables are equal to their desired set points. Following the guidelines in [24], two integrated white noise unmeasured disturbances, , entering at the inputs are assumed. This can be achieved by using (23)
(23) This selection ensures offset free tracking for the system described in [24], where the controlled output used in the MPC objective function is a linear combination of the measurements.
.. . (24) Special care must be taken when partitioning the whole operating region. In general, increasing the number of partitions and, consequently, reducing the range of each subregion will enhance the linear approximation and the prediction accuracy. This comes at the cost of increasing the controller complexity and the computational burden. In this paper, the algorithm proposed in [11] will be used to generate the partitions in (25). The algorithm is based on partitioning the whole operating region of the WECS such that the prediction mismatch between different linear models within each partition is bounded by certain value [11]. VII. MPPT ALGORITHM Many MPPT algorithms can be used to calculate that is sent to the turbine controller during partial load operation [2]. One alternative is to adjust to change linearly with the effective wind speed such that the tip speed ratio is always kept at its optimal value [1], [6], [12], and [13]. The main shortcoming of this approach is that it requires the knowledge of the effective wind speed experienced by the rotor blades. This fictitious speed cannot be measured and it is very difficult to estimate. The approach that is used in this paper, shown in Fig. 6, is similar to the one described in [4], [5], [8], and [25]. An experimental validation of this approach on a DFIG test bench is provided in [4]. This approach does not require knowledge of the effective wind speed; and is calculated using (25), where is an estimate of the turbine torque. The turbine torque estimator described in [4] and [25] is used in this paper. Using (A.3), it easy to show that when the turbine is operating at the optimal tip speed ratio, the relation in (25) is satisfied (25)
Remark 1: The generator torque scaled by the gear box ratio can be used in (25) as a rough estimate for the turbine torque. However, this approach ensures optimal operation of the wind turbine in steady state only. That is why a turbine torque estimator is commonly used [4], [8], and [25].
SOLIMAN et al.: MULTIPLE MODEL PREDICTIVE CONTROL FOR WIND TURBINES WITH DFIGs
221
angle is 61 . In all simulations presented in this section, the designed controllers are tested on the nonlinear model described in Appendix A, with data given in Appendix B. The speed, torque, and power signals have been normalized based on the per unit system described in [3]. Remark 2: It was found that the MMPC calculations required less than 25 ms (about 50% of the sampling time) in simulations carried on a 1.66-GHz dual core. Remark 3: The PI controllers of the classical strategy were tuned such that the settling time of the closed loop system is similar to that obtained using the MMPC controller.
Fig. 6. MPPT algorithm. TABLE I MMPC SUBREGIONS AND CONTROLLER DATA
B. Performance Measures In order to compare different control strategies, there must be some performance indicators that reflect the performance of the closed loop system. In the partial load regime, controller tracking performance is measured using the average power produced during the entire simulation. To measure the flicker emission, a digital flickermeter is implemented in Matlab [25], based on the IEC 61000-4-15 standard [26], to calculate the short-term flicker severity at the PCC bus shown in Fig. 7. Finally to compare the pitch activity, the standard deviation of the pitch rate will be used. C. Simulation Results
Fig. 7. Power system studied.
VIII. SIMULATION RESULTS A. Simulation Setup In this section, the performance of the proposed control strategy is compared with the classical gain scheduled PI control strategy described in Section V. For a fair comparison, the same MPPT algorithm, shown in Fig. 6, is used with both controllers in all simulations. Using the algorithm proposed in [11], the whole operating region, with and given in Appendix B, is partitioned into six operating subregions defined in Table I. For each of these subregions, a linearized model (9) at is assumed to be available. Using these models, six MPC controllers are designed following the guidelines in Section VI-C1, resulting in the settings listed in Table I. The other MMPC parameters are chosen as (26) The system under study, shown in Fig. 7, assumes that a 1.5-MW DFIG wind turbine is connected to a radial system [26]. The short circuit ratio (SCR) at the point of common coupling (PCC) is 13.3 MVA and the short circuit impedance
1) Partial Load With Variable-Speed Operation (Low Wind Speed): A simulation of ten minutes of partial load WECS operation was performed. The first 50 s of this simulation are shown in Fig. 8. It can be seen that both the MMPC and the classical controller provide similar tracking performance of the generator speed. Calculating the average power in both simulations, as shown in Table II, reveals that both controllers have similar power production. Furthermore, it can be observed in Fig. 8 that and fluctuate regardless of the type of control strategy used. This is due to the continuous variation in to track the MPP. However, the amplitudes of these oscillations decrease when the MMPC control strategy is used. Table II indicates that the MMPC strategy provides around 45% reduction in the flicker emission in comparison to the classical strategy. 2) Partial Load Operation at Near Rated Wind Speed (Medium Wind Speed): A simulation result for partial load operation near the rated wind speed (11 m/s) is shown in Fig. 9. It can be seen that power and drive train torque overshoots occur when using the classical control strategy. The MMPC eliminated these overshoots and the generator power and speed stay within the rated values given in Appendix B. However, this is achieved by increasing the pitch activity. Statistics given in Table III confirm these observations. It can be seen in the third column in Table III that the MMPC controller reduces the maximum power, the maximum drive train torque, and the flicker emission by about 12%, 8%, and 21%, respectively, when compared to the classical PI strategy. 3) Full Load Operation (High Wind Speed): A simulation result for full load operation of the WECS is shown in Fig. 10. It can be observed that when using the MMPC controller, the power fluctuations are much reduced. The price of this reduction is an increase in the generator speed fluctuations in comparison with the classical control strategy. Furthermore, Table IV
222
IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, VOL. 2, NO. 3, JULY 2011
Fig. 8. Simulation results for low wind speeds.
TABLE II LOW WIND SPEEDS STATISTICS
Fig. 9. Simulation results for medium wind speeds.
shows about 32% reduction in the pitch activity and 40% reduction in the flicker emission are obtained when using the MMPC controller.
TABLE III MEDIUM WIND SPEEDS STATISTICS
D. Robustness of the Proposed Strategy To investigate the robustness of the proposed MMPC to parametric uncertainties, 10% changes of the nominal values of the parameters , , , and are assumed. The response of the uncertain systems is compared to the nominal response, after a step change in the generator speed command , in Fig. 11. It can be seen that the MMPC controller is robust against parametric uncertainties. Similar results are obtained when testing
the MMPC in the full load regime. Results are omitted due to space limitation. Remark 5: If the uncertainty ranges of the model parameters are known, a robust MPC controller can be designed systematically using the approach proposed in [27].
SOLIMAN et al.: MULTIPLE MODEL PREDICTIVE CONTROL FOR WIND TURBINES WITH DFIGs
223
IX. CONCLUSION A multivariable control strategy based on MPC techniques was proposed to control variable-speed variable-pitch WECSs over their full operating ranges. In the partial load regime, the MMPC controller can be designed to provide the desired trade-off between energy maximization and reduction of the drive train torsional torque. Near the rated wind speed, power and drive train torsional torque overshoots are eliminated and flicker emissions can be significantly reduced. In the full load regime, the MMPC controller uses both the pitch angle and the generator torque to regulate the generator power and speed. This reduces pitch activity, smooths the generated power, and reduces flicker emissions. Furthermore, the MMPC controller provides the desired WECS performance while keeping the system variables within safe operating limits. Performance of the MMPC controller is compared with the classical gain scheduled PI control strategy. Simulation results show superiority of the proposed strategy over the whole operating region of the WECS. Experimental validation of the proposed strategy is currently under investigation. APPENDIX A DFIG-BASED WECS MODEL [1]–[5] 1) Pitch Actuator System: (A.1) (A.2) is the time constant of the pitch system and is the maximum (minimum) limit of . 2) Aerodynamic System:
Here,
(A.3) Fig. 10. Simulation results for high wind speeds. TABLE IV HIGH WIND SPEEDS STATISTICS
(A.4) (A.5) Here, is the turbine (aerodynamic) torque; is the blade is the power coefficient; is the length; tip speed ratio; and is the speed of the low speed shaft. 3) Drive Train Model: (A.6) (A.7)
(A.8)
Fig. 11. Closed loop step response comparison of the uncertain systems and the nominal system controlled by the MMPC controller.
and are the inertia of the turbine and the generHere, ator, respectively; is the drive train torsional torque; is the gear ratio; and are the shaft stiffness and damping coefficients, respectively.
224
IEEE TRANSACTIONS ON SUSTAINABLE ENERGY, VOL. 2, NO. 3, JULY 2011
4) DFIG Model: a) Induction generator model:
(A.9)
(A.10) (A.11) In (A.9)–(A.11), , , , and denote voltages, currents, flux linkages, resistances, and inductances, respectively. The subscripts and denote the direct and quadrature axis components, respectively. The subscripts and denote generator stator and rotor quantities, respectively. and are the generator synchronous speed and the number of pole pairs of the generator, respectively. b) Model of the GSC connection to the grid:
Proof: The only difference between the MPC controller used in this paper and the one described in [24] is the presence of the unmeasured controller output , defined in (10), in the objective function (15). To simplify notation, the superscript in (9)–(21) is dropped. First, it should be noticed that the system (6) is a nonintegrating process and both and are invertible. By assumption, when the closed loop system reaches steady state, it follows from the observer equations in (20) and (21) and the disturbance model matrices (23) that [24]: (C.1) are the steady state values of the meawhere , , , and surement vector, control input, plant state estimate, and disturbance state estimate. Substituting (C.1) and (23) in the prediction model (14), (C.2) is obtained (C.2) Using (C.1) and (13) in (C.2) gives
(A.12)
(C.3)
In (A.12), , , , and are the grid side filter resistance, inductance, and the direct and quadrature axis voltage at the GSC terminals, respectively. c) DC link model:
Since is invertible and by using (12), the following results are obtained
(A.13) (A.14) Here, , , and denote the dc link capacitance, the active power of the GSC and of the rotor, respectively. 5) Generator Controller: Detailed description of the generator controller based on vector control techniques is given in [14]. APPENDIX B DFIG-BASED WECS DATA 1) Wind Turbine/Drive System rated power Rated turbine speed Min/Max turbine speed
Train/Pitch System: MW (0.9 p.u.). rpm (1.2 p.u.). rpm. m. m/s. . Turbine inertia constant s. Generator inertia constant s. Shaft stiffness pu. Shaft damping pu. . s. s. 2) DFIG System: Rated generator apparent power MVA. Hz. . p.u. p.u. p.u.. p.u. p.u. p.u. p.u. F. Rated DC Link Voltage V. APPENDIX C Theorem: Consider a WECS controlled by an MMPC described in Section VI. If the closed loop system is stable and constraints are not active at steady state, then and asymptotically.
(C.4) From (C.3) and (C.4) and since from (8), it can be concluded that at steady state , and, therefore, the objective function (15) is equivalent to the one used in [24] and the rest of the proof will be similar to the proof of Theorem 1 in [24]. REFERENCES [1] F. D. Bianchi, H. Battista, and R. J. Mantz, Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design. London: Springer-Verlag, 2007. [2] I. Munteanu, A. I. Bratcu, and N. A. Cutululis, Optimal Control of Wind Energy Systems. New York: Springer-Verlag, 2008. [3] V. Akhmatov, Induction Generators for Wind Power. Essex, U.K.: Multi-Science Publishing Co. Ltd., 2007. [4] H. Camblong, I. M. de Alegria, M. Rodriguez, and G. Abad, “Experimental evaluation of wind turbines maximum power point tracking controllers,” Energy Convers. Manage., vol. 47, pp. 2846–2858, 2006. [5] A. D. Hansen, P. Sorensen, F. Lov, and F. Blaabjerg, “Control of variable speed wind turbines with doubly-fed induction generators,” Wind Eng., vol. 28, pp. 411–443, 2004. [6] I. Munteanu, N. A. Cutululis, A. I. Bratcu, and E. Ceanga, “Optimization of variable speed wind power systems based on a LQG approach,” Control Eng. Pract., vol. 13, pp. 903–912, Jul. 2005. [7] F. D. Bianchi, R. J. Mantz, and C. F. Christiansen, “Control of variablespeed wind turbines by LPV gain scheduling,” Wind Energy, vol. 7, pp. 1–8, 2004. [8] E. A. Bossanyi, “The design of closed loop controllers for wind turbines,” Wind Energy, vol. 3, pp. 149–163, 2000. [9] E. B. Muhando, T. Senjyu, A. Yona, H. Kinjo, and T. Funabashi, “Disturbance rejection by dual pitch control and self-tuning regulator for wind turbine generator parametric uncertainty compensation,” IET Control Theory Applicat., vol. 1, pp. 1431–1440, 2007.
SOLIMAN et al.: MULTIPLE MODEL PREDICTIVE CONTROL FOR WIND TURBINES WITH DFIGs
[10] F. D. Bianchi, R. J. Mantz, and C. F. Christiansen, “Power regulation in pitch-controlled variable-speed WECS above rated wind speed,” Renewable Energy, vol. 29, pp. 1911–1922, 2004. [11] M. Soliman, O. P. Malik, and D. Westwick, “Multiple model MIMO predictive control for variable speed variable pitch wind energy conversion systems,” IET Renewable Power Generation, 2010, accepted for publication. [12] K. Z. Ostergaard, J. Stoustrup, and P. Brath, “Linear parameter varying control of wind turbines covering both partial load and full load conditions,” Int. J. Robust Nonlinear Control, vol. 19, pp. 92–116, 2009. [13] M. Soliman, O. P. Malik, and D. Westwick, “Multiple model MIMO predictive control for variable speed variable pitch wind turbines,” in Proc. 2010 Amer. Control Conf., Baltimore, MD, 2010. [14] R. Pena, J. C. Clare, and G. M. Asher, “Doubly fed induction generator using back-to-back PWM converters and its application to variablespeed wind-energy generation,” Proc. Inst. Elect. Eng., Electric Power Applications, vol. 143, pp. 231–241, May 1996. [15] T. Petru and T. Thiringer, “Modeling of wind turbines for power system studies,” IEEE Trans. Power Syst., vol. 17, no. 4, pp. 1132–1139, Nov. 2002. [16] H. Camblong, M. R. Vidal, and J. R. Puiggali, “Principles of a simulation model for a variable-speed pitch-regulated wind turbine,” Wind Eng., vol. 28, pp. 157–175, 2004. [17] T. Sun, Z. Chen, and F. Blaabjerg, “Flicker study on variable speed wind turbines with doubly fed induction generators,” IEEE Trans. Energy Convers., vol. 20, no. 4, pp. 896–905, Dec. 2005. [18] J. Maciejowski, Predictive Control With Constraints. Englewood Cliffs, NJ: Prentice-Hall, 2000. [19] Y. Wang and S. Boyd, “Fast model predictive control using online optimization,” in Proc. 17th World Congress, The International Federation of Automatic Control, Seoul, Korea, 2008, pp. 6974–6980. [20] A. Bemporad, M. Morari, and N. L. Ricker, Model Predictive Control Toolbox 3—User’s Guide. Natick, MA: The Mathworks, Inc., 2008 [Online]. Available: http://www.mathworks.com/access/helpdesk/help/toolbox/mpc/ [21] M. A. Henson, “Nonlinear model predictive control: Current status and future directions,” Comput. Chem. Eng., vol. 23, pp. 187–202, 1998. [22] M. Kuure-Kinsey and B. W. Bequette, “Multiple model predictive control: A state estimation based approach,” in Proc. 2007 Amer. Control Conf., 2007, pp. 3739–3744. [23] G. F. Franklin, J. D. Powell, and M. L. Workman, Digital Control of Dynamic Systems. Menlo Park, CA: Addison-Wesley, 1998. [24] F. Borrelli and M. Morari, “Offset free model predictive control,” in Proc. 46th IEEE Conf. Decision and Control 2007, 2007, pp. 1245–1250. [25] B. Boukhezzar and H. Siguerdidjane, “Comparison between linear and nonlinear control strategies for variable speed wind turbines,” Control Eng. Pract., vol. 18, pp. 1357–1368, 2010. [26] Z. Lubosny, Wind Turbine Operation in Electric Power Systems. Berlin, Heidelberg, New York: Springer-Verlag, 2003. [27] A. Bemporad, F. Borrelli, and M. Morari, “Min-max control of constrained uncertain discrete-time linear systems,” IEEE Trans. Autom. Control, vol. 48, no. 9, pp. 1600–1606, Sep. 2003.
225
Mostafa Soliman (S’00–M’09) received the B.E. and M.Sc. degrees both in electric engineering from Cairo University, in 2003 and 2006, respectively. Currently, he is working toward the Ph.D. degree in electrical engineering at the University of Calgary, Calgary, AB, Canada. His current research interests include model predictive control and subspace identification techniques with applications to the modeling and control of wind power conversion systems.
O. P. Malik (M’66–SM’69–F’87–LF’00) received the National Diploma in electrical engineering from Delhi Polytechnic, India, in 1952, the M.E. degree in electrical machine design from the University of Roorkee, Roorkee, India, in 1962, the Ph.D. degree from the University of London, in 1965, and the D.I.C. degree from the Imperial College, London, U.K., in 1965. He has been involved in teaching and research for 45 years and is currently Professor Emeritus in the Department of Electrical and Computer Engineering, University of Calgary, Calgary, AB, Canada. He has done extensive research in the development of adaptive and artificial intelligence-based techniques for real-time control and protection of machines and power systems.
David T. Westwick (M’97) received the B.A.Sc. degree in engineering physics from The University of British Columbia, the M.Sc.E. degree in electrical engineering from The University of New Brunswick, and the Ph.D. degree in electrical engineering from McGill University. After earning his PhD., he spent two years as a research associate in the Department of Biomedical Engineering at Boston University, and a year at the Technical University of Delft as a research fellow in the Systems and Control Engineering Group. Since 1999, he has been a faculty member in the Department of Electrical and Computer Engineering at the University of Calgary, where he is currently a Professor. In 2006, he was a visiting researcher with the Sensory Motor Performance Program at the Rehabilitation Institute of Chicago. His publications include a textbook, The Identification of Nonlinear Physiological Systems, published in 2003 as part of the IEEE Engineering in Medicine and Biology book series. His research interests include developing system identification techniques to construct mathematical models of various dynamical systems arising in diverse applications ranging from neuromuscular control and robotics to power systems and electrical machines.