Nov 30, 2013 - It comprises a pair of GPUs, two Asus GTX780 3 GB DirectCU ... therefore may be any desktop computer or even a laptop, since it does not ...
Experimental Setup and Configuration for Joint Attention in CASIR Pablo Lanillos
Jo˜ao Nuno Oliveira
Jo˜ao Filipe Ferreira
Technical Report MRL-CASIR-2013-11-TR001 November 30, 2013
Mobile Robotics Laboratory Institute of Systems and Robotics University of Coimbra P´ olo II, Pinhal de Marrocos c Institute of Systems and Robotics
Abstract The aim of this report is to present the experimental equipment, setup and configuration to be used within the scope of the CASIR project, designed with the purpose of studying the influence of automatic (i.e. involuntary) attentional processes in social interaction with robots. A detailed description of the architecture will be presented, namely in what regards the hardware and computational resources supporting the robotic active head to be used as the prototypical robotic agent used throughout the project. Moreover, the configuration of the experimental space will be described, focussing on its potential for enacting the intended human-robot interaction (HRI) scenarios.
I
Contents 1 Introduction
1
2 The CASIR-IMPEP Framework 2.1 System architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 The Integrated Multimodal Perception Experimental Platform (IMPEP) 2.2.1 Sensory units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.2 Motor framework for active perception . . . . . . . . . . . . . . . 2.2.3 Reference frames . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Behind the scenes: the Robot Operating System (ROS) . . . . . . . . . 2.4 The CASIR-IMPEP demonstrator . . . . . . . . . . . . . . . . . . . . . 3 The 3.1 3.2 3.3
. . . . . . .
1 1 2 3 4 4 4 6
CASIR-IMPEP Experimental Setup for Joint Attention Prerequisites for social interactivity . . . . . . . . . . . . . . . . . . . . . . . . . . Spatial configuration and tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . Potential for application in the context of joint attention . . . . . . . . . . . . . .
7 7 8 8
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
4 Conclusions
9
5 Acknowledgements
9
References
9
II
web service
visualization computer
internet
remote user
IMPEP
main computer sensor data
controller comands 2 x GPUs
4 cores processor
motor control computer
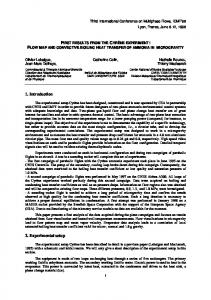
Figure 1: The CASIR-IMPEP system architecture overview.
1
Introduction
Humans assess and exhibit intentionality by resorting to processes that are deeply rooted within low-level automatic attention-related mechanisms of the brain. For robots to engage with humans properly, they should also be equipped with similar capabilities. Following accumulating evidence from research efforts in neuroscience and psychophysics, joint attention, the precursor of many fundamental types of social interactions, has been an important focus of research in robotics in the past decade and a half. It therefore provides the perfect backdrop for studying the influence of automatic (i.e. involuntary) attentional processes in social interaction with robots. The purpose of this report is describe the experimental equipment, setup and configuration to be used within the scope of the CASIR project to support this research, and is organised as follows: • section 2 presents the overall setup of the system’s architecture, namely the computational framework and hardware, and also the characteristics, sensors and actuators of the platform used as the prototypical robotic agent; • section 3 will describe the configuration of the experimental space, focussing on its potential for enacting the intended human-robot interaction (HRI) scenarios in the context of joint attention.
2 2.1
The CASIR-IMPEP Framework System architecture
Fig. 1 shows an overview of the robotic system’s architecture, built around the robotic active head IMPEP (Integrated Multimodal Perception Experimental Platform). The system includes three computational units: The main computer. This is the main computational resource of the system, dedicated to executing all of the perceptual and higher-level cognitive processing needed to confer IMPEP its social role within HRI. It comprises a pair of GPUs, two Asus GTX780 3 GB DirectCU II OC GPU units, that are used to perform all heavy-duty, performance-critical massively parallel computation1 . For all other non-parallelisable computational processes, it is fitted with a four-core CPU, an INTEL Core i7-3770. Additionally, the main computer includes 1 Although two GPUs are available, using NVIDIA’s SLI system, software development may be performed by considering them as a single computational unit in a transparent way.
1
an Asrock Z77 OC Formula Motherboard, 8 GB of memory (Kingston HyperX Blu DDR31600 Mhz RAM), 128 GB of SSD storage via a KINGSTON SSDNow V200, and a Seagate Barracuda 1 TB hard disk. Due to current communication bandwidth limitations, all sensors are directly connected to this computer. Since mobility will not be an issue for this project, this does not influence the experiments whatsoever. The motor control computer. This computational unit is only dedicated to receive control commands from and acknowledge actuation to the main computer via a wireless connection. Although the experiments concerning this project do not require mobile robotics (see previous description), the IMPEP is planned in the future to allow such mobility, thus justifying this particular configuration. Its specifications are: Mobile DualCore Intel Pentium M 1666 MHz of CPU with L1 (32 KB) and L2 (2048 KB) cache, 1024 MB of RAM, 74 GB hard disk space, an integrated graphics card and a DCX-PCI300 mainboard for motor control (see section 2.2.2). The visualisation computer. This computational unit is only for visualisation purposes, and therefore may be any desktop computer or even a laptop, since it does not need to run processes in real-time. Its goal is to free the main computer from having to deal with non-essential computation, while simultaneously allowing the research team to be able to collect visual data and monitor the experiments. The system is designed to be used in three different ways, following a general philosophy inspired by the application proposed by Weißhardt [2011]: • local experimentation with the physical platform; • offline experimentation using a simulated environment; • remote, web-based experimentation. The former will be the main mode of operation. Experimentation using the simulated environment allows for the enactment of offline experiments, in order to safely and controllably develop and test new algorithms or components. Remote experimentation is performed by registering in the CASIR-IMPEP web service and requesting system time. Researchers outside the laboratory can therefore design their own experiments and then test them using the CASIR-IMPEP system. It is important to stress out that the CASIR-IMPEP system and the three modes of operation described above are to outlast the actual project – the final goal is to have an open experimental infrastructure for the ultimate benefit of the local and global scientific communities.
2.2
The Integrated Multimodal Perception Experimental Platform (IMPEP)
The Integrated Multimodal Perception Platform (IMPEP v2.0 – Fig. 2), an active robotic head designed and developed at the Faculty of Science and Technology of the University of Coimbra (FCT-UC), is to be used as the prototypical robotic agent throughout the project. The mounting hardware and motors were designed by the Perception on Purpose (POP - EC project number FP6-IST-2004-027268) team of the Institute of Systems and Robotics/FCT-UC, and the sensor systems mounted at the Mobile Robotics Laboratory of the same institute, within the scope of the Bayesian Approach to Cognitive Systems project (BACS - EC project number FP6-IST-027140). In the following text, we present a summary description the sensory units of the platform, followed by an analogously brief description of its motors and respective controllers, and we conclude by defining the overall reference frames. For more detailed specifications of the IMPEP framework, which are beyond the scope of this report, please refer to [Faria and Lobo 2009; Pinho et al. 2008].
2
(a) Schematic design [Pinho et al. 2008]
(b) Components
Figure 2: The Integrated Multimodal Perception Experimental Platform, a robotic active head including visual, auditory, kinaesthetic and inertial/vestibular sensory units.
2.2.1
Sensory units
The IMPEP includes four sensory units, forming two systems, as shown in Fig. 2: Exteroceptive system2 : Visual unit. A stereovision unit is implemented through a pair of Firewire Guppy cameras from Allied Vision Tech (http://www.videredesign.com). Auditory unit. A binaural unit is implemented by means of two AKG Acoustics C417 linear microphones (http://www.akg.com/) and a Scarlett 2i2 USB audio interface from Focusrite (http://global.focusrite.com/). Proprioceptive system3 : Kinaesthetic unit4 . This system is collectively composed by the encoders corresponding to each of the four motors of the IMPEP, depicted in Fig. 2. Vestibular unit. An inertial measuring unit (IMU), an Xsens MTi (http://www.xsens. com/), which provides digital output of 3D acceleration, 3D rate of turn (gyro rate) and 3D earth-magnetic field data, is used to emulate the human vestibular system. This unit completes the proprioceptive system, since it yields readings regarding pan and tilt (yaw and pitch) rotations, but also conveys more encompassing information regarding egomotion, namely rotations around the roll axis. It is a part of future prospective plans for the integration of the IMPEP framework on a mobile robot. Additionally, the IMPEP has also been fitted with a Microsoft Kinect sensor (http://www. xbox.com/en-GB/Kinect). This sensor will essentially be used to provide ground truth concerning the three-dimensional structure of the environment (for example, to grade the data obtained using the stereovision or the binaural systems), but may also be used as an additional depth sensor for multimodal fusion processes.
2 Exteroception is the perception of stimuli originating outside or at a distance from the body. It is used as opposed to interoception, which is the perception of events concerning internal organs. 3 Proprioception, a juxtaposition of the latin word proprius (meaning “one’s own” or “individual”) and the word “perception”, refers to the perception of pose and motion of acting parts of the body (such as the limbs, head or eyes). It is used as opposed to exteroception and interoception. 4 Kinaesthesis is a subset of proprioception, obtained by excluding the sense of equilibrium or balance, which would provide missing information needed to obtain world-referenced orientation.
3
2.2.2
Motor framework for active perception
The IMPEP motor framework allows for four degrees of freedom, namely active head pan and tilt and also camera vergence5 , as depicted in Fig. 2. The following description is based on what was presented by Faria and Lobo [2009]. A closed-loop control system is implemented using motor encoders and PID controllers. The system allows commands such as position, velocity, acceleration and torque; however only position and velocity control are effectively implemented. The hardware controllers have a maximum operating frequency of 5 MHz6 . The motor control computer is fitted with a DCX-PCI300 mainboard, a motor control board with PCI interface by Precision MicroControl (PMC – http://www.pmccorp.com), that allows the assembly of 8 control modules for several types of motors. In the case of the CASIR-IMPEP system, four individual controllers are installed, one for each axis. The micro-controller model is the MC300-R5, also from PMC. Moreover, to allow more accurate and reliable connections between the control module, the motor encoders and the power driver, an interconnection card is used (model DCX-BF300, also from PMC). Two PMA-11A-100-01-E500ML motors (one for pan, one for tilt) and two PMA-5A-80-01E512ML motors (one for each camera axis) from Harmonic Drive (http://www.harmonicdrive. net) are used for actual actuation. The PMA-11A pan and tilt motors operate at 36 volts and the PMA-5A camera motors operate at 18 volts. The entire system is powered by a modular AC-DC power supply from Meanwell (http: //www.meanwell.com), which has a main module (MP650) connected to other modules (MS150-G, MS-300-2J, MD-100S) to provide the different DC power voltages (18 volts, 36 volts and 5 volts) for the motors and additional sensors needed in the future. 2.2.3
Reference frames
The reference frames of the IMPEP framework are mainly defined in conformance with an egocentric (i.e. head-centric and sensor-centric) perspective – all coordinate systems are represented on Fig. 2a. The following description is based on what was presented by Pinho et al. [2008]. In coherence with this perspective, the egocentric reference frame {E} represents the main coordinate system of IMPEP framework, where the Z-axis points forward and the X- and Y -axes follow the right thumb rule. The world coordinate system {W}, to which the former might be referenced for allocentric processing, if needed, follows the East-North-Up (ENU) convention, where the Z-axis points up. The inertial frame {I} defined by the IMU provides a rotational reference (the Z-axis points upward, the X-axis points forward, and the Y -axis points to the left) calibrated against the world coordinate system (namely by referring to the magnetic north and gravitational pull direction). The pan-tilt frame {PT } is defined at the “neck” of the platform, and its orientation is calibrated against the analogous of a frontal orientation referred to an imaginary torso – it, consequently, explicitely establishes the orientation of the main egocentric reference frame {E}. Local reference frames for each exteroceptive sensor are also defined in relation to the egocentric sagittal plane. A reference frame is defined for each camera – {Cr } and {Cl }, corresponding the right and left cameras, respectively. Two additional implicit reference frames are defined for the binaural setup {Mr }, {Ml }, corresponding to the two microphones positioned on the right and left side of the robot head, respectively. “Right” and “left”, in both cases, refer to the point-of-view of the robotic head in frontal orientation.
2.3
Behind the scenes: the Robot Operating System (ROS)
The Robotic Operating System (ROS) is a software framework designed for robot applications currently maintained by Willow Garage [Quigley et al. 2009]. It provides libraries and tools to help developers in areas such as hardware abstraction, off-the-shelf device drivers, messagepassing, data visualisation and transparent usage of heterogeneous computer clusters, and will 5 In
formally correct terms, independent horizontal binocular movements. maximum working frequency decreases to 8 KHz, if PID control is enabled [Faria and Lobo 2009].
6 The
4
Figure 3: The CASIR-IMPEP ROS infrastructure [Oliveira and Ferreira 2013].
be used in the CASIR project to provide the tools for developing system components and for enacting communication, synchronisation and brokering between them. A detailed description of its usage within the scope of this project is given in [Oliveira and Ferreira 2013]; the overall concept and architecture will be summarised in the text that follows. ROS is an open source project, which means that off-the-shelf components developed by other institutions may and will be reused in the CASIR-IMPEP framework, while components from the project are expected to provide an meaningful contribution for the ROS-using scientific community and also for robotics in general. The CASIR-IMPEP system uses a ROS Fuerte implementation version, which is fully supported under the Ubuntu 12.04 LTS linux distribution. The ROS infrastructure concept for the CASIR-IMPEP framework is summarised in Fig. 3. In runtime, ROS acts as a communication layer interface where a set of components7 are connected. Each component is an input-output black box that typically both subscribes to information from other components, processing this information together with local data, and also publishes its own output for other processes, by passing messages through topics. This makes the system modular and allows developers to add new components easily (i.e. it provides extensibility). An example of a system component within the ROS infrastructure used in this project is the IMPEP motor controller that receives angular commands and outputs the velocity and position commands to the micro-controllers. Data flow becomes clear by exemplifying the sequence of information exchange throughout a typical iteration of an active perception process: the IMPEP sensors publish their data for low-level perceptual components (e.g. an optical flow processing 7 Components as abstract processing units in ROS are called nodes, and are grouped in packages and eventually stacks [Oliveira and Ferreira 2013].
5
component for vision) to process; the output of these components is in turn used by high-level components to decide the next gaze-shift for fixation; finally, this fixation point is sent to the IMPEP motor controller to be converted into velocity and position commands, as described previously. The CASIR-IMPEP ROS infrastructure therefore implements the overall vision for the architecture laid out in section 2.1: • It deals with the requirement of separating computation from visualisation via the use of a separately deployable package powered by the ROS tool rviz, which is installed in a visualisation computer and transparently subscribes to topics from remote components residing in the main computer in order to allow visual monitoring and graphical logging capabilities. • It deals with offline simulated environment experimentation using a ROS package that functions as a plugin for Gazebo [Koenig and Howard 2004], which is connected to the same common driver API (application programming interface) as the drivers of the physical sensors/actuators via the IMPEP driver stack. This means that both may be used interchangeably in a transparent fashion, which is much more convenient in the developer’s point of view. • It tackles remote, web-based experimentation by use of the ROS interface rosbridge – for more details, please refer to [Alexander et al. 2012] for a general explanation of the usage of this interface, and also [Oliveira and Ferreira 2013] for the concrete implementation within the CASIR-IMPEP ROS infrastructure.
2.4
The CASIR-IMPEP demonstrator
An additional requirement for the experimental setup used within the scope of the CASIR project is the availability of a demonstrator throughout (at least) the project’s lifespan. The demonstrator’s goal is to showcase the most recent stable features of the CASIR-IMPEP framework, namely in what regards its perceptual, cognitive and/or social capabilities, and as such will be updated throughout the course of the project. This demonstration should be easily launchable at any time by any researcher at the Mobile Robotics Laboratory, including non-members of the CASIR team. The very first version of this demonstrator showcases basic active perception capabilities, including low-level perceptual processing such as image rectification, disparity generation and depth perception in frontoparallel stereovision configuration, and also monocular optical flow computation, using OpenCV (Open Source Computer Vision – http://opencv.org/) functionalities, which provide a couple of feature images that are linearly combined to allow gaze shifts (i.e. active head reorientations) towards the most salient features in the image. The demonstrator is to be run in this fashion in an intentional infinite loop. This replicates human-like overt attention processes in a very simplistic fashion, but already gives an inkling to the future capabilities of the framework, while providing a means to validate current implementations of low-level supporting algorithms. The sequence of steps to launch the CASIR-IMPEP demonstrator are as follows: 1. power on the main computer, and log in using the account demo (password impepdemo), which automatically launches the ROS “demo daemon”; 2. turn on triple outlet providing power to the IMPEP motors and encoders, and then power on the motor control computer, which immediately, automatically and sequentially launches the motor autocalibration process and connects to the “demo daemon” using its own local ROS distribution8 ; 3. (optional) power on the visualisation computer and log in as in 1, which automatically launches the rviz -based ROS visualisation component using its own local ROS distribution, displaying the most relevant information for the current version of the demonstrator. 8 This
step is common to any type of usage of the CASIR-IMPEP framework.
6
3 3.1
The CASIR-IMPEP Experimental Setup for Joint Attention Prerequisites for social interactivity
When two interlocutors look at each other (i.e. they become the focus of attention of one another), we have what is called a dyadic agent-agent relation. However, when one of the agents changes his/her/its focus of attention (FOA) intentionally to a third entity, and the second agent follows by acknowledging this intention and redirecting his own FOA to that same third entity, we are now in the presence of a triadic relation. This intentional attention coordination together with mutual awareness is called joint or shared attention. In the human developmental timeline, this is the first fundamental skill for social interaction relating to attention [Kaplan and Hafner 2006, 2004; Asada et al. 2009; Lungarella et al. 2003; Lungarella and Metta 2003]. Consider the following illustrative example: A mother looks at a toy, looks back at her two-year-old child to make sure that she looked at the toy, and utters the word “elephant”. Then, the child nods and repeats the word “elephant”, thus signalling the understanding of her mother’s intention. A few days later, the child exchanges roles with the mother, while trying to make her understand that she wants her to play with another object, in this case a toy dog. This type of social interaction, due to its simplicity and also the considerable body of research work already undertaken in robotics, is the specific backdrop for the experiments to be performed within the context of the CASIR project. Successful experimentation with human-robot social interaction requires several conditions to be met, most of them relating to the analogous requirements in human social interaction – joint attention, in particular, calls for very specific experimental conditions. Therefore, in the search of an optimised experimental configuration for ideal and adaptive interactivity, and most particularly in the context of joint attention, the following prerequisites should be accounted for: Spatial conformity. Social interaction is known to be dependent on distances between potential interlocutors. In other words, for this type of interaction to take place, its participants will base their willingness to engage and rate the willingness of the peers they become aware of on the distance ranges within which they inherently feel comfortable with. Sociological and anthropological studies have shown that, for this reason, distance ranges may be classified according to their role in social interaction. Hall [1990] identifies three distance ranges: personal distance (from around .5 m to 1 m), social distance (from around 1 m to 4 m) and public distance (from 4 m onwards). From a different perspective, namely in terms of how human beings perceive depth, Cutting and Vishton [1995] identify three distance ranges: personal space (from the agent’s body to just over 1 m – extending “a little beyond arm’s reach”), action space (from 2 m to 30 m – “an average individual can throw something reasonably accurately to [this] distance”) and vista space (beyond 30 m, up to the horizon line). Obviously, social interaction must take place within a distance range starting just within the outer limit of personal space and ending at the outer limit of social distance – beyond this limiting distance, even if the robot is aware of a potential interlocutor, it should consider that engagement might not be possible (social cues are most probably not accurately sensed in this distance range) or even desirable (the interlocutor might not be interested in engaging, and is keeping at a distance). Accounting for (and therefore testing) these particular scenarios would be desirable, since a socially-capable robot should exhibit adaptivity under these conditions, and as such the experimental configuration should be planned in order to allow exploring different distance ranges. Enabling triadic relations. For the specific interaction comprising joint attention, there is a need to enable the establishment of triadic relations; in other words, the experimental configuration should include a workspace for interaction with objects, and even allow the inclusion of a third agent.
7
Figure 4: Overview of the experimental configuration, showing the IMPEP framework (section 2.2), a table for interaction with objects within personal/action space to allow the establishment of triadic relations, and the social space where human interlocutors are to engage with the robotic platform prototype.
3.2
Spatial configuration and tools
The experimental configuration for the CASIR project has been designed to provide the maximum flexibility for experimentation while keeping test scenarios controllable – an overview of the setup is shown in Fig. 4. The robotic platform is facing the main entrance door to the Mobile Robotics Laboratory (not visible in Fig. 4), which is roughly placed at 6 m from the IMPEP; although some care should be taken in most of the experiments so as not to compromise a trial due to someone entering the lab, this situation might be an advantage in terms of testing the robot’s adaptive behaviour when faced with undesired agents outside social space, as explained in the section 3.1. The workspace provided by the table encompasses a useful area of 180 cm × 90 cm, and the social space is delimited by a useful area for interaction of 250 cm × 200 cm. The distance to the closest facing non-relevant object (furniture) is around 4.7 m.
3.3
Potential for application in the context of joint attention
As an interactive process, joint attention is dynamic, cyclical and dividable into several phases: initiating joint attention (IJA) by the agent through attention manipulation; responding to joint attention (RJA) through attention detection, by resorting to gaze following or through the detection of other cues such as pointing; and, as recognised by some authors, acknowledging joint attention (AJA) and the more proactive ensuring joint attention (EJA), which are the processes of monitoring and re-establishing the IJA-RJA cycle. Active engagement between a robot and a human interlocutor in joint attention is illustrated in Fig. 5. As can be seen in this figure, the CASIR-IMPEP setup allows for testing the robot’s reaction and performance with regards of the different kinds of events occurring within the course of joint attention: gaze engaging, gaze following, target detection among distractors, reaction to unexpected events, etc. On the other hand, all of the prerequisites identified in section 3.1 are met.
8
(a) Initiating joint attention startup through mutual gaze
(b) Attention manipulation through declarative gaze shifting
(c) Responding to joint attention through intentional gaze following
(d) Establishing triadic correspondence and acknowledging joint attention
Figure 5: Enactment of an experimental trial illustrating the joint attention process.
4
Conclusions
The aim of this report was to present the experimental equipment, setup and configuration to be used within the scope of the CASIR project, designed with the purpose of studying the influence of automatic (i.e. involuntary) attentional processes in social interaction with robots. A detailed description of the architecture was presented, namely in what regards the hardware and computational resources supporting the robotic active head to be used as the prototypical robotic agent used throughout the project. The apparatus supporting the CASIR-IMPEP system architecture was described: firstly, the robotic platform and its sensors and actuators, followed by the software framework that provides the tools for developing system components and for enacting communication, synchronisation and brokering between them. The overall agenda defined for the architecture, namely the ability to perform local experimentation with the physical platform, offline experimentation using a simulated environment, and remote, web-based experimentation was fulfilled. Additionally, a demonstrator of the framework was designed and its first version described. Finally, the configuration of the experimental space was described, focussing on its potential for enacting the intended human-robot interaction (HRI) scenarios. More concretely, all prerequisites identified as being important for adequate and complete testing of these scenarios were shown to be addressed.
5
Acknowledgements
This work was supported by the Portuguese Foundation for Science and Technology (FCT) and by the European Commission via the COMPETE programme [project grant number FCOMP01-0124-FEDER-028914, FCT Ref. PTDC/EEIAUT/3010/2012].
9
References Alexander, B., Hsiao, K., Jenkins, C., Suay, B., and Toris, R. Robot web tools [ROS topics]. IEEE Robotics Automation Magazine, 19(4):20–23, 2012. ISSN 1070-9932. 6 Asada, M., Hosoda, K., Kuniyoshi, Y., Ishiguro, H., Inui, T., Yoshikawa, Y., Ogino, M., and Yoshida, C. Cognitive developmental robotics: A survey. IEEE Transactions on Autonomous Mental Development, 1(1):12–34, 2009. 7 Cutting, J. E. and Vishton, P. M. Perceiving layout and knowing distances: The integration, relative potency, and contextual use of different information about depth. In Epstein, W. and Rogers, S., editors, Handbook of perception and cognition, volume 5; Perception of space and motion. Academic Press, 1995. 7 Faria, H. and Lobo, J. IMPEP II – New Robotic Vision Head Wiring and Hardware Structure. Technical report, Mobile Robotics Lab – Institute of Systems and Robotics, Coimbra, Portugal, 2009. 2, 4 Hall, E. T. The Hidden Dimension. 9780385084765. 7
Anchor Books, New York, N.Y., 1990.
ISBN 0385084765
Kaplan, F. and Hafner, V. The challenges of joint attention. In Proceedings of the 4th International Workshop on Epigenetic Robotics, pages 67–74, Genoa, 2004. Lund University Cognitive Science Studies. 7 Kaplan, F. and Hafner, V. V. The challenges of joint attention. Interaction Studies, 7(2):135–169, 2006. 7 Koenig, N. and Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004.(IROS 2004), volume 3, pages 2149–2154, 2004. 6 Lungarella, M. and Metta, G. Beyond gazing, pointing, and reaching: A survey of developmental robotics. In Proceedings of the 3rd International Workshop on Epigenetic Robotics, pages 81–89, 2003. 7 Lungarella, M., Metta, G., Pfeifer, R., and Sandini, G. Developmental robotics: a survey. Connection Science, 15(4):151–190, 2003. 7 Oliveira, J. N. and Ferreira, J. F. ROS Infrastracture for IMPEP. Technical Report MRL-CASIR2013-12-TR002, Mobile Robotics Lab – Institute of Systems and Robotics, Coimbra, Portugal, December 2013. 5, 6 Pinho, C., Prado, J., Ferreira, J. F., and Dias, J. The Integrated Multimodal Perception Experimental Platforms. Technical Report BACS-FP6-IST-27140/FCT-TechRep-IMPEP-3, Mobile Robotics Lab – Institute of Systems and Robotics, Coimbra, Portugal, April 11 2008. 2, 3, 4 Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T., Leibs, J., Wheeler, R., and Ng, A. Y. ROS: an open-source robot operating system. In ICRA workshop on open source software, volume 3, 2009. 4 Weißhardt, F. Care-o-bot-research: Providing robust robotics hardware to an open source community. presentation, 2011. 2
10