INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
1
ISSN 2229-5518
Mathematical Applications of Queueing Theory in Call Centers V.S. Selvi and M. Nishanthi Abstract: Queueing theory has a wide range of applications to real world problems. In this paper, we present the concept and work culture in Call centers and summarize some results. We also present the performance, characterization and properties. Finally, we mention some applications. Index Terms - Queues, Call Center, Poisson Process, Non-homogeneous Poisson process.
—————————— ——————————
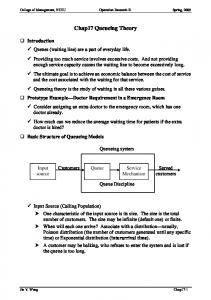
1. INTRODUCTION
2. VARITIES
A
Some variations of call center models are listed below:
call center is a centralized office used for the purpose of receiving and transmitting a large volume of requests by telephone. A call center is operated by a company to administer incoming product support or information inquiries from consumers. Outgoing calls for telemarketing, clientele, product services, and debt collection are also made. In addition to a call center, collective handling of letters, faxes, live chat, and e-mails at one location is known as a contact center.
A call center is often operated through an extensive open workspace for call center agents, with work stations that include a computer for each agent, a telephone set/headset connected to a telecom switch, and one or more supervisor stations. It can be independently operated or networked with additional centers, often linked to a corporate computer network, including mainframes, microcomputers and LANs. Increasingly, the voice and data pathways into the center are linked through a set of new technologies called computer telephony integration (CTI).
Outbound call center - One in which call center agents make outbound calls to customers or sales leads.
Blended call center - Combining automatic call distribution for incoming calls with predictive dialling for outbound calls, it makes more efficient use of agent time as each type of agent (inbound or outbound) can handle the overflow of the other.
Telephone answering service - A more personalized version of the call center, where agents get to know more about their customers and their callers; and therefore look after calls just as if based in their customers office.
3. CRITICISM AND PERFORMANCE
————————————————
V. S. Selvi is currently serving in the Department of Mathematics, Theivanai Ammal College for Women, Viluppuram,, India
M. Nishanthi
Contact center – Supports interaction with customers over a variety of media, including but not necessarily limited to telephony, e-mail and internet chat. Inbound call center - Exclusively or predominantly handles inbound calls (calls initiated by the customer).
is currently pursuing. Phil. degree program in Mathematics, Theivanai Ammal College for Women, Viluppuram, India
Criticisms of call centers generally follow a number of common themes, from both callers and call center staff. From callers, common criticisms include: Operators working from a script
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
2
ISSN 2229-5518
Non-expert operators (call screening) Incompetent or untrained operators incapable of processing customers' requests effectively.
Obsequious behavior by operators (e.g., relentless use of Sir, Ma'am and I'd be happy to assist you)
Overseas location, with language and accent problems
Touch tone menu systems and automated queuing systems
Excessive waiting times to be connected to an operator
Complaints that departments of companies do not engage in communication with one another
Deceit over location of call center (such as allocating overseas workers false English names)
Requiring the caller to repeat the same information multiple times
4. PROISSON PROCESS In probability theory, a Poisson process is a stochastic process which counts the number of events and the time that these events occur in a given time interval. The time between each pair of consecutive events has an exponential distribution with parameter 𝛌 and each of these inter-arrival times is assumed to be independent of other interarrival times. The process is named after the French mathematician Siméon-Denis Poisson and is a good model of radioactive decay, telephone calls and requests for a particular document on a web server, among many other phenomena. The Poisson process is a continuous-time process; the sum of a Bernoulli process can be thought of as its discrete-time counterpart. A Poisson process is a pure-birth process, the simplest example of a birth-death process. It is also a point process on the real half-line. Definition. The basic form of Poisson process, often referred to as the Poisson process, is a continuous-time counting process {N(t), t ≥ 0} that possesses the following properties:
Common criticisms from staff include:
Close scrutiny by management (e.g. frequent random call monitoring)
Low compensation (pay and bonuses)
Restrictive working practices (some operators are required to follow a prewritten script)
High stress: a common problem associated with front-end jobs where employees deal directly with customers
N(0) = 0
Independent increments (the numbers of occurrences counted in disjoint intervals are independent from each other)
Stationary increments (the probability distribution of the number of occurrences counted in any time interval only depends on the length of the interval)
No counted occurrences are simultaneous.
Consequences of this definition include:
Repetitive job task
Poor working conditions (e.g. poor facility, poor maintenance and cleaning, cramped working conditions, management interference, lack of privacy and noisy) Impaired vision and hearing problems
Rude and abusive customers
IJSER © 2012 http://www.ijser.org
The probability distribution of N(t) is a Poisson distribution. The probability distribution of the waiting time until the next occurrence is an exponential distribution. The occurrences are distributed uniformly on any interval of time. (Note that N(t), the
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
3
ISSN 2229-5518
total number of occurrences, has a Poisson distribution over (0, t ], whereas the location of an individual occurrence on t ∈ (a, b] is uniform.) Other types of Poisson process are described below. The homogeneous Poisson process is one of the most well known Lévy processes. This process is characterized by a rate parameter λ, also known as intensity, such that the number of events in time interval (t, t + τ] follows a Poisson distribution with associated parameter λτ. This relation is given as P [ (N(t+τ) - N(t)) = k] =
𝑒 −𝜆𝜏 (𝜆𝜏 )𝑘 𝑘!
k=0,1,…,
where N(t+τ) - N(t) = k is the number of events in time interval (t, t + τ]. Just as a Poisson random variable is characterized by its scalar parameter λ, a homogeneous Poisson process is characterized by its rate parameter λ, which is the expected number of events or arrivals that occur per unit time. N(t) is a sample homogeneous Poisson process, not to be confused with a density or distribution function. In general, the rate parameter may change over time; such a process is called a non-homogeneous Poisson process or inhomogeneous Poisson process. In this case, the generalized rate function is given as λ(t). Now the expected number of events between time a and time b is 𝜆𝑎,𝑏 =
𝑏 𝑎
A further variation on the Poisson process, the space-time Poisson process, allows for separately distinguished space and time variables. Even though this can theoretically be treated as a pure spatial process by treating "time" as just another component of a vector space, it is convenient in most applications to treat space and time separately, both for modeling purposes in practical applications and because of the types of properties of such processes that it is interesting to study. In comparison to a time-based inhomogeneous Poisson process, the extension to a space-time Poisson process can introduce a spatial dependence into the rate function, such that it is defined as 𝛌(x,t), where x ∈ 𝑉for some vector space V (e.g. R2 or R3). However, a space-time Poisson process may have a rate function which is constant with respect to either x or t or both. For any set S ⊂ 𝑉 (e.g. a spatial region) with finite measure µ(S) , the number of events occurring inside this region can be modeled as a Poisson process with associated rate function λS(t) such that
𝜆(𝑡) 𝑑𝑡
𝜆𝑆
Thus, the number of arrivals in the time interval (a, b], given as N(b) − N(a), follows a Poisson distribution with associated parameter λa,b P [ (N(b) - N(a)) = k] =
An important variation on the (notionally timebased) Poisson process is the spatial Poisson process. In the case of a one-dimension space (a line) the theory differs from that of a time-based Poisson process only in the interpretation of the index variable. For higher dimension spaces, where the index variable (now x) is in some vector space V (e.g. R2 or R3), a spatial Poisson process can be defined by the requirement that the random variables defined as the counts of the number of "events" inside each of a number of nonoverlapping finite sub-regions of V should each have a Poisson distribution and should be independent of each other.
𝑒 −𝜆 𝑎 ,𝑏 (𝜆 𝑎 ,𝑏 )𝑘 𝑘!
k=0,1,…
(𝑡) =
𝑆
𝜆(𝑥, 𝑡) 𝑑µ(𝑥)
5. SEPARABLE SPACE-TIME PROCESSES In the special case that this generalized rate function is a separable function of time and space, we have:
A homogeneous Poisson process may be viewed as a special case when λ(t) = λ, a constant rate. IJSER © 2012 http://www.ijser.org
𝛌(x,t) = f(x) 𝛌(t)
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
4
ISSN 2229-5518
= lim𝑑𝑡 →0
for some function f(x) . Without loss of generality, let
(If this is not the case, λ(t) can be scaled appropriately.) Now, f(x) represents the spatial probability density function of these random events in the following sense. The act of sampling this spatial Poisson process is equivalent to sampling a Poisson process with rate function λ(t), and associating with each event a random vector X sampled from the probability density function f(x) . A similar result can be shown for the general (non-separable) case.
In its most general form, the only two conditions for a counting process to be a Poisson process are Orderliness: which roughly means lim 𝑃 𝑁 𝑡 + ∆𝑡 − 𝑁 𝑡 > 1 𝑁 𝑡 + ∆𝑡 − 𝑁 𝑡 ≥ 1) = 0
which implies that arrivals don't occur simultaneously (but this is actually a mathematically stronger statement). Memorylessness (also called evolution without after-effects): the number of arrivals occurring in any bounded interval of time after time t is independent of the number of arrivals occurring before time t.
These seemingly unrestrictive conditions actually impose a great deal of structure in the Poisson process. In particular, they imply that the time between consecutive events (called inter-arrival times) are independent random variables. For the homogeneous Poisson process, these inter-arrival times are exponentially distributed with parameter λ (mean 1/λ). Proof : Let 𝜏1 be the first arrival time of the Poisson process. Its distribution satisfies Pr[𝜏1 = 𝑥] = lim𝑑𝑡 →0
Pr [𝑁𝑥 +𝑑𝑡 >0,𝑁𝑥 =0] 𝑑𝑡
= 𝛌 exp(-𝛌x) Also, the memorylessness property entails that the number of events in any time interval is independent of the number of events in any other interval that is disjoint from it. This latter property is known as the independent increments property of the Poisson process.
7. PROPERTIES As defined above, the stochastic process {N(t)} is a Markov process, or more specifically, a continuous-time Markov process.
6. CHARACTERIZATION
Pr [𝑁𝑥 = 0]
1 − (1 − 𝜆𝑑𝑡 + 𝑂(𝑑𝑡 2 )) exp (−𝜆𝑥) 𝑑𝑡 →0 𝑑𝑡
𝑉
∆𝑡→0
𝑑𝑡
= lim
𝑓 𝑥 𝑑𝜇(𝑥) = 1
1−Pr [𝑁𝑑𝑡 =0]
To illustrate the exponentially distributed interarrival times property, consider a homogeneous Poisson process N(t) with rate parameter λ, and let Tk be the time of the kth arrival, for k = 1, 2, 3, ... . Clearly the number of arrivals before some fixed time t is less than k if and only if the waiting time until the kth arrival is more than t. In symbols, the event [N(t) < k] occurs if and only if the event [Tk > t] occurs. Consequently the probabilities of these events are the same: P (𝑇𝑘 > 𝑡) = P (N(t) < 𝑘). In particular, consider the waiting time until the first arrival. Clearly that time is more than tif and only if the number of arrivals before time t is 0. Combining this latter property with the above probability distribution for the number of homogeneous Poisson process events in a fixed interval gives P (𝑇1 > 𝑡) = P(N(t) =0) = P[(N(t) – N(0)) = 0] =
𝑒 −𝜆𝑡 (𝜆𝑡 )0 0!
= 𝑒 −𝜆𝑡 .
Consequently, the waiting time until the first arrival T1 has an exponential distribution, and is thus memoryless. One can similarly show that the other inter-arrival times Tk − Tk−1 share the same distribution. Hence, they are independent, identically distributed (i.i.d.) random variables
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
5
ISSN 2229-5518
with parameter λ > 0; and expected value 1/λ. For example, if the average rate of arrivals is 5 per minute, then the average waiting time between arrivals is 1 in 5 minutes.
[3]
Donald Gross Carl M.Harris, Fundamentals of Queueing Theory, Third Edition, Wiley India, 1998.
[4]
G.Srinivasan, Operations Research Principles and Applications, PHI Learning Private Limited. New Delhi, 2007.
[5]
E. Page, Introduction of Queuing Theory in operation Research, 1972.
[6]
B. Cooper, Introduction to Queuing Theory, 1972. Jean Walrand, An Introduction to Queuing Networks, 1988.
8. APPLICATIONS The classic example of phenomena well modeled by a Poisson process is deaths due to horse kick in the Prussian army, as shown by LadislausBortkiewicz in 1898. The following examples are also well-modeled by the Poisson process:
Requests for switchboard.
Goals scored in a soccer match.
Requests for individual documents on a web server.
telephone
calls
at
a
Particle emissions due to radioactive decay by an unstable substance. In this case the Poisson process is non-homogeneous in a predictable manner - the emission rate declines as particles are emitted.
[7]
[8]
H.M. Wagner, Principles of Operation Research, 1972.
[9]
G. F. Newell, Applications of Queuing Theory, Second Edition, 1982.
[10] L. Venkata Subramaniam, Call Centers of the Future, 2008 .
In queueing theory, the times of customer/job arrivals at queues are often assumed to be a Poisson process.
Sample Path of a Poisson process N(t)
REFERENCES [1]
A. Panico, Queueing Theory, Hall, Inc., Englewood cliffs, N.J.
Prentice-
[2]
Churchman, C.West,Russel L.Ackott, E.Leonard Arnoff, Introduction to Operation Reseach, .New York; John Wiley and sons,Inc,1963. IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
6
ISSN 2229-5518
On Generalized Preregular Closed Sets In Supra Topological Spaces Vidhya Menon Abstract - In this paper, a new class of sets called supra generalized preregular closed sets in supra topological spaces is introduced and its properties are studied. Further the notion of supra preregular T 1/2 space and supra generalized preregular continuity are introduced. Index Terms - Supra preclosed set, Supra generalized preclosed set, Supra generalized preregular closed set, Supra generalized preregular open set, supra generalized preregular continuous function.
—————————— ——————————
1. INTRODUCTION 1983, Mashhour et al [6] introduced the INconcept of supra topological space and studied S
– continuous maps and S*- continuous maps. The study on supra topological space was further extended and in 2008, Devi et al [3] introduced and studied a class of sets called supra α – open sets and a class of maps called Sα – continuous maps between topological spaces. In 2010, Sayed and Noiri [9] introduced supra b – open sets and supra b - continuity on topological spaces. In 2011, Ravi et al [8] introduced supra sg - closed sets and supra gs - closed sets. Arockiarani and M.Trinita Pricilla [1] introduced supra generalized b-regular closed sets in 2012. In 1997, Gnanambal [4] introduced generalized preregular closed sets in general topological spaces. In this paper we define and study the properties of supra generalized preregular closed sets (briefly gprµ closed) and their relationship with other classes of sets in supra topological spaces.
The elements of µ are said to be supra open in (X, µ) and the complement of a supra open set is called supra closed set. The supra closure of a set A, denoted by clµ(A), is the intersection of supra closed sets including A . The supra interior of a set A, denoted by intµ(A), is the union of supra open sets included in A. The supra topology µ on X is associated with the topology τ if τ ⊂ µ. Throughout this paper (X, µ ), (Y, σ) and (Z, η) (or simply X, Y and Z) denote supra topological spaces on which no separation axioms are assumed unless explicitly stated. (X, µ ) will be replaced by X if there is no chance of confusion. Definition 2.2 A subset A of a space ( X, µ ) is called i) supra preclosed [8] if clµ(intµ(A)) ⊆ A . ii) supra α- closed [8] if clµ(intµ(clµ(A))) ⊆ A. iii) supra semi – preclosed [8] if intµ(clµ(intµ(A))) ⊆ A. iv) supra regular closed [1] if A = clµ(intµ(A)) The complements of the above mentioned closed sets are called their respective open sets.
2. PRELIMINARIES Definition 2.1 [6] A subcollection µ ⊂ P(X) is called a supra topology on X if X ϵ µ and µ is closed under arbitrary union. (X,µ) is called a supra topological space.
Definition 2.3 Let A be a subset of X. i) The supra pre-closure of a set A is defined as pclµ(A) = ∩ (B : B is a supra preclosed set and A ⊆ B)
———————————
Vidhya Menon is working in the Department of Mathematics, CMS College of Science and Commerce, Coimbatore, India. E-mail:
ii) The supra pre-interior of a set A is defined as pintµ (A) = ∪ (B : B is a supra preopen
[email protected] IJSER © 2012 http://www.ijser.org
set and B ⊆ A)
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
7
ISSN 2229-5518
Definition 2.4 called
A subset A of a space (X,µ) is
i) supra generalized closed (briefly gµ - closed) [1] if clµ(A) ⊆ U whenever A ⊆ U and U is supra open in X . ii) supra
generalized α-closed (briefly gαµ
-
closed) [1] if αcl (A) ⊆ U whenever A ⊆ U and U is supra α –open in X.
Example 3.4 Let X = {a, b, c}. i) If µ = { ɸ, X, {b , c}}, A = {b , c} is gprµ closed but not gµ - closed. ii) If µ = { ɸ, X, {a},{a , b},{a , c}}, A = {a} is gprµ - closed but not gpµ - closed. iii) If µ = { ɸ, X, {c},{a , c}} , A = {c} is gprµ closed but not αgµ - closed.
µ
iii) supra
α- generalized closed (briefly αgµ -
closed) [1] if αclµ(A) ⊆ U whenever A ⊆ U and U is supra open in X. iv) supra regular generalized closed (briefly rgµ closed) [7] if clµ(A) ⊆ U whenever A ⊆ U and U is supra regular-open. v) supra generalized preclosed (briefly gpµ
-
closed) if pcl (A) ⊆ U whenever A ⊆ U and U is supra open in X. µ
Remark 3.5 gprµ - closed sets and gspµ – closed sets are independent of each other. Example 3.6 Let X = {a, b, c} and µ ={ ɸ, X, {a},{a , b},{a , c}}. Let A = {a}. A is gprµ - closed but not gspµ – closed. Example 3.7 Let X = {a, b, c, d, e} and µ = { ɸ, X, {a , b},{c , d},{a, b, c, d}}. Let A = {a , b}. A is gspµ – closed but not gprµ – closed.
gspµ - closed) if spclµ(A) ⊆ U whenever A
Theorem 3.8 If A is supra regular open and gprµ - closed, then A is supra preclosed.
⊆ U and U is supra open in X.
Proof. If A is supra regular open and gprµ - closed
vi) supra generalized semi - preclosed (briefly
then pclµ (A) ⊂ A. Also A ⊂ pclµ (A) for any set A .Thus A is supra preclosed.
3. SUPRA GENERALIZED PREREGULAR CLOSED SETS Definition 3.1 A subset A of (X,µ) is called supra generalized preregular closed (briefly gprµ closed) if pclµ(A) ⊆ U whenever A ⊆ U and U is supra regular open in (X,µ). Theorem 3.2 i) ii) iii) iv)
Every rgµ - closed set is gprµ - closed . Every gµ - closed set is gprµ - closed . Every gpµ - closed set is gprµ – closed. Every αgµ - closed set is gprµ – closed.
Example 3.10 Let X = {a, b, c, d} and µ = { ɸ, X, {a},{a , c},{b, c},{a, b, c}}. Let A = {b} and B = {c}. A and B are gprµ closed sets but A ∪ B is not gprµ - closed. Remark 3.11 Intersection of two gprµ - closed sets need not be gprµ - closed.
Proof . Obvious. However the converse of the above said theorems are not true. Example 3.3 Let X = {a, b, c, d} and µ = { ɸ, X, {a},{a , c},{b , c},{a, b, c}}. A = {b} is gprµ - closed but not rgµ - closed.
Remark 3.9 Union of two gprµ - closed sets need not be gprµ - closed.
Example 3.12 Let X = {a, b, c} and µ = { ɸ, X, {a}, {b},{a , b}}. Let A = {a , b} and B = {a , c}. A and B are gprµ - closed in (X, µ ). But A ∩ B is not gprµ - closed in (X, µ).
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
8
ISSN 2229-5518
Theorem 3.13 Let A be gprµ - closed in (X, µ). Then pclµ (A) – A does not contain any non empty supra regular closed set. Proof. Let B be a supra regular closed set such that B ⊆ pclµ (A) – A. Thus B ⊆ pclµ(A) and B⊆Ac. Then B ⊆ X– A implies A ⊆ X – B. Since A is gprµ - closed and X – B is supra regular open , pclµ (A) ⊆ X – B. That is B ⊆ X - pclµ (A). Hence B ⊆ pclµ (A) ∩ (X - pclµ (A)) = ɸ. This shows B = ɸ. The converse of the above theorem is not true .
Theorem 3.18 Let A and B be gprµ - closed µ sets in (X, µ ) such that 𝐷µ [A] ⊆ 𝐷𝑃 [A] and µ
𝐷µ [B] ⊆ 𝐷𝑃 [B]. Then A ∪ B is gprµ - closed set. Proof. Let U be supra regular open set such that
(A ∪ B) ⊆ U. Then A ⊆ U and B ⊆ U. Since A and B are gprµ - closed sets pclµ (A) ⊆ U and pclµ µ (B) ⊆ U. For any set E ⊂ (X, µ ), 𝐷𝑃 [E] ⊂ µ µ 𝐷µ [E]. Hence 𝐷𝑃 [A] = 𝐷µ [A] and 𝐷𝑃 [B] = 𝐷µ [B]. That is clµ (A) = pclµ (A) and clµ (B) = pclµ (B). clµ (A∪ B) = clµ (A) ∪ clµ (B) = pclµ (A) ∪ pclµ
Example 3.14 Let X = {a, b, c ,d,} and µ = { ɸ, X, {a},{a, c},{b, c},{a, b, c}}. Let A = {b, c}, then pclµ (A) – A = {d}, does not contain any non empty supra regular closed set but A is not gprµ - closed. . µ
Corollary 3.15 Let A be gpr - closed in (X, µ). Then A is supra preclosed iff pclµ (A) – A is supra regular closed. µ
(B) ⊆ U . But pclµ (A∪B) ⊆ clµ (A∪ B). Therefore pclµ (A∪B) ⊆ U. Thus A∪B is gprµ - closed. Theorem 3.19 If A is gprµ - closed and A ⊆ B
⊆ pclµ (A), then B is gprµ - closed. Proof. Let B ⊆ U where U is a supra regular open
Proof. Let A be supra preclosed. Then pcl (A) = A implies pclµ (A) – A = ɸ which is supra regular closed. Conversely suppose pclµ (A) – A is supra regular closed. Then pclµ (A) – A = ɸ and A is gprµ closed . This shows pclµ (A) = A or A is supra preclosed.
set. Now A ⊆ B implies A ⊆ U . Since A is
Definition 3.16 Let (X, µ) be a supra topological
Remark 3.21
space, A ⊂ X and x ϵ X . x is said to be a supra limit point of A iff every supra open set containing x contains a point of A different from x. The supra derived set of A denoted by 𝐷µ [A] is the set of all supra limit points of A. Definition 3.17 Let (X, µ) be a supra topological space, A ⊂ X and x ϵ X. x is said to be a supra pre-limit point of A iff every supra preopen set containing x contains a point of A different from x. The set of all supra pre- limit points of A is said to be the supra pre-derived set of A denoted by µ 𝐷𝑃 [A] .
gprµ - closed, pclµ(A) ⊆ U. Given B ⊆ pclµ(A) implies pclµ(B) ⊆ pclµ(A).Thus pclµ(B) ⊆ U. Therefore B is gprµ - closed. Definition 3.20 A set A ⊂ X is called gµpr - open set if and only if its complement is gprµ - closed. pclµ(X – A) = X – pintµ( A ).
Theorem 3.22 A ⊂ X is gprµ - open set if and only if F ⊂
pintµ(A) whenever
F is
supra
regular closed and F ⊂A. Proof. Let A be gprµ - open. Let F be supra regular closed and F ⊂ A. This implies X – A ⊂ X – F . So X – F is is supra regular open. Since A is gprµ - open, X – A is gprµ - closed. This implies
pclµ (X – A) ⊂ X – F . Thus X –
pintµ(A) ⊂ X – F by Remark 3.21.Therefore F ⊂ pintµ(A).
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
9
ISSN 2229-5518
Conversely suppose F is supra regular closed and F ⊂ A. This implies F ⊂ pint (A). Let X – A ⊂ µ
U where U is supra regular open. Then X – U ⊂ A where X – U is supra regular closed. By hypothesis X– U ⊂ pintµ(A). This implies X – pintµ(A ) ⊂ U. Thus pclµ(X – A) ⊂ U by remark 3.21. Therefore X – A is gprµ - closed. Hence A is gprµ - open. Theorem 3.23 If pintµ(A) ⊂ B ⊂ A and A is gprµopen then B is gprµ - open. Proof. Given pintµ(A) ⊂ B ⊂ A, implies X – A ⊂ X – B ⊂ X – pintµ(A). That is X – A ⊂ X – B ⊂ pclµ(X - A). Since A is gprµ - open, X - A is gprµ - closed. Then by theorem 3.19 X – B is gprµ - closed. Thus B is gprµ - open.
4. gprµ -CONTINUOUS AND gprµ – IRRESOLUTE FUNCTIONS Definition 4.1 A function 𝑓 : (X, µ) → (Y,σ) is called a gprµ - continuous if 𝑓 −1 (V) is gprµ closed in (X, µ) for every supra closed set V of (Y, σ). Definition 4.2 A function 𝑓: (X, µ) → (Y,σ) is called a gprµ - irresolute if 𝑓 −1 (V) is gprµ -closed in (X, µ) for every gprµ - closed set V in (Y, σ). Example 4.3 Let X = {a, b, c, d, e} and µ = { ɸ, X,{a, b, c}} and σ = { ɸ, X, {a, b, c, d}}. Define a function 𝑓 : (X, µ) → (X, σ) by 𝑓(a) = e, 𝑓(b) = d, 𝑓(c) = c, 𝑓(d) = a, 𝑓(e) = b. Since for every supra closed set V of (X, σ) , 𝑓 −1 (V) is gprµ - closed in (X, µ). Therefore 𝑓 is gprµ - continuous. Also the inverse image of every gprµ- closed set is gprµ closed under 𝑓. Hence 𝑓 is gprµ - irresolute. Theorem 4.4 Every gprµ - irresolute function is gprµ - continuous. Proof. It is obvious. Converse is not true.
Example 4.5 Consider X = {a, b, c}, µ = { ɸ, X, {a}, {c},{a , c}} and σ = { ɸ, X, {a}}. Define a function 𝑓 : (X, µ) → (X, σ) by 𝑓(a) = b, 𝑓(b) = c, 𝑓(c) = a. Then 𝑓 is gprµ - continuous but not gprµ irresolute. Theorem 4.6 i) Let 𝑓 : (X, µ) → (Y, σ) be rgµ- continuous. Then 𝑓 is gprµ - continuous. ii) Let 𝑓 : (X, µ) → (Y, σ) be αgµ- continuous. Then 𝑓 is gprµ - continuous Proof. i) Let V be supra closed in (Y, σ).Then 𝑓 −1 (V) is rgµ - closed in (X, µ) as 𝑓 is rgµ- continuous. By theorem 3.2( i) 𝑓 −1 (V) is gprµ - closed. Hence 𝑓 is gprµ - continuous. ii) Let U be supra closed in (Y, σ) .Then 𝑓 −1 (U) is αgµ - closed in (X, µ) as 𝑓 is αgµ continuous. Since every αgµ - closed set is gprµ – closed, we have 𝑓 −1 (U) is gprµ closed. Hence 𝑓 is gprµ -continuous. Converse of the above theorem does not hold. Example 4.7 Let X = {a, b, c, d}; µ = { ɸ, X, {a},{a , c},{b , c},{a, b, c}} and σ = { ɸ, X, {a, b, d}}. Define a function 𝑓 : (X, µ) → (X, σ) by 𝑓(a) = a, 𝑓(b) = b, 𝑓(c) = c, 𝑓(d) = d. Here 𝑓 is gprµ continuous but is not rgµ-continuous . Example 4.8 Let X = {a, b, c } , µ = { ɸ, X, {a , c}, {b , c}} and σ = { ɸ, X, {a}}. Let g : (X, µ) → (X, σ ) be defined by g(a) = a, g(b) = b, g(c) = c. Then g is gprµ - continuous in (X, µ). But it is not αgµ - continuous . Theorem 4.9 Let 𝑓 : (X, µ) → (Y, σ) be supra regular irresolute and supra preclosed. Then for every gprµ - closed set A of (X , µ) , 𝑓(A) is gprµ - closed in (Y, σ). Proof. Let A be a gprµ - closed set of (X, µ). Let 𝑓(A) ⊂ U where U is supra regular open
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
10
in Y. Then A ⊂ 𝑓
ISSN 2229-5518
−1
(Y, σ). As 𝑓 is gprµ - irresolute 𝑓 −1 (𝑔−1 (V)) = (𝑔𝑜𝑓)−1 (V) is gprµ - closed in (X, µ ). Hence 𝑔𝑜𝑓 is gprµ - irresolute.
(U). Since f is supra regular
irresolute and A is gprµ - closed, pclµ (A) ⊂ 𝑓 −1 (U). This implies 𝑓(pclµ (A)) ⊂ U. Thus pclµ (𝑓(A)) ⊂ pclµ (𝑓(pclµ (A))) = 𝑓(pclµ (A)) ⊂ U. Hence 𝑓(A) is gprµ-closed in (Y, σ). Remark 4.10 The composition of two gprµ continuous functions need not be gprµ – continuous.
iii) Let V be closed in (Z, η ). Since 𝑔 is gprµ continuous, 𝑔−1 (V) is gprµ - closed in (Y, σ). As 𝑓 is gprµ - irresolute 𝑓 −1 (𝑔−1 (V)) = (𝑔𝑜𝑓)−1 (V) is gprµ - closed in (X, µ). Hence 𝑔𝑜𝑓 is gprµ - continuous.
5. SUPRA PREREGULAR T1/2 SPACES Example 4.11 Let X = {a, b, c, d}, µ = { ɸ, X,{a},{a, b},{a, b, d},{b, d}}, σ = { ɸ, X ,{b},{b ,c , d}} and η = { ɸ, X ,{a, b, c}}. Define a function 𝑓 : (X, µ) → (X, σ) by 𝑓(a) = b, 𝑓(b) = c, 𝑓(c) = d, 𝑓(d) = a
Definition 5.1 A space (X,µ) is called supra preregular T1/2 space if every gprµ - closed set is supra preclosed.
Define a function 𝑔 : (X, σ) → (X, η ) by 𝑔(a) = a, 𝑔(b) = d, 𝑔(c) = c, 𝑔(d) = b. Then 𝑓 and 𝑔 are gprµ - continuous. {d} is supra closed in (X, η ). (𝑔𝑜𝑓)−1 {d} = {a} is not gprµ closed in (X, µ). Hence 𝑔o𝑓 is not gprµ continuous. Theorem 4.12 Let 𝑓 : (X, µ) → (Y,σ) and 𝑔 : (Y, σ) → (Z, η ) be any two functions. Then i) 𝑔𝑜𝑓 is gprµ - continuous , if 𝑔 is supra continuous and 𝑓 is gprµ - continuous. ii) 𝑔𝑜𝑓 is gprµ - irresolute , if 𝑔 is gprµ irresolute and 𝑓 is gprµ - irresolute.
Remark 5.2 The notions supra preregular T1/2 and supra T1/2 are independent of each other. Example 5.3 Let X = {a, b, c, d}, µ = { ɸ, X ,{a,},{b},{c},{a , b},{b , c},{a , c},{a, b, c}} and σ = { ɸ, X, {a , b}, {c , d}}. (X, µ) is supra T1/2 but not supra preregular T1/2 whereas (X, σ) is supra preregular T1/2 but not supra T1/2. Theorem 5.4 For a supra topological space (X,µ) the following conditions are equivalent i) X is a supra preregular T1/2 ii) Every singleton of X is either supra regular closed or supra preopen. Proof. (i) →(ii) Let x ϵ X and assume that {x} is not supra regular closed. Then X – {x} is not supra regular open and X – {x} is trivially gprµ - closed . By (i) it is supra preclosed and thus {x} is supra preopen.
iii) 𝑔𝑜𝑓 is gprµ - continuous , if 𝑔 is gprµ continuous and 𝑓 is gprµ - irresolute.
(ii) → (i)
Proof. i) Let V be supra closed in (Z, η ). Then 𝑔−1 (V) is supra closed in (Y, σ). Since 𝑔 is supra continuous , gprµ - continuity of 𝑓 implies 𝑓 −1 (𝑔−1 (V)) is gprµ - closed in (X, µ) .That is (𝑔𝑜𝑓)−1 (V) is gprµ - closed in (X, µ) . Hence 𝑔𝑜𝑓 is gprµ - continuous.
Let A ⊂ X be gprµ - closed and let x ϵ pclµ (A). We will show that x ϵ A . Consider the following two cases : Case 1) The set {x} is supra regular closed. Then, if x does not belongs to A, there exist a supra regular closed set in pclµ (A) – A. By theorem 3.13, x ϵ A
ii) Let V be gprµ - closed in (Z, η ). Since 𝑔 is gprµ - irresolute, 𝑔−1 (V) is gprµ - closed in IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
11
ISSN 2229-5518
Case 2) The set {x} is supra preopen. Since x ϵ pclµ (A), then {x} ∩ pclµ (A) ≠ ɸ. Thus x ϵ A. So, in both cases x ϵ A. Thus pclµ (A) ⊂ A or equivalently A is supra preclosed. The collection of all supra preopen and supra generalized preregular open subsets of X is denoted by POµ(X) and GPROµ (X) . Theorem 5.5 Let (X,µ) be a supra topological space. Then (i) POµ(X) ⊂ GPROµ (X). (ii) A space (X, µ) is supra preregular T1/2 iff POµ(X ) = GPROµ (X) . Proof. i) Let A be supra preopen. Then X - A is supra preclosed and so gprµ - closed. This implies A is gprµ - open. Hence POµ(X) ⊂ GPROµ (X).
[2] P.Bhattacharrya and B.K. Lahari, Semi – generalized closed sets in topology, Indian J. Math, 29(3)(1987), 357-382. [3] R.Devi, S.Sampathkumar and M.Caldas, On supra α - open sets and Sα –continuous functions, General Mathematics, Vol 16, Nr. 2(2008), 77-84. [4] Y.Gnanambal, On generalized preregular closed sets in topological spaces, Indian J. pure appl.Math . 28(3), (1997), 351 – 360. [5] N. Levine, Generalized closed sets in topology, Rend.Circ.Mat.Palermo, (2) 19(1970), 89 – 96. [6] A.S.Mashhour, A.A.Allam , F.S.Mahamoud and F.H.Khedr , On supra topological spaces, Indian J. Pure and Appl.Math . No.4, 14(1983), 502-510.
ii) Necessity Let (X, µ) be supra preregular T1/2. Let A ϵ GPROµ (X). Then X- A is gprµ -closed. By hypothesis X – A is supra preclosed and thus A ϵ POµ(X). Hence GPROµ(X) = POµ(X). Sufficiency Let POµ(X) = GPROµ (X). Let A be gprµ closed. Then X- A is gprµ - open. Hence X – A ϵ POµ(X). Thus A is supra preclosed thereby implying (X, µ) is supra preregular T1/2.
ACKNOWLEDGEMENT The author is thankful to Dr. Gnanambal Ilango, Department of Post Graduate and Research Studies in Mathematics, Govt. Arts College, Coimbatore, for her kind help in preparing this paper.
[7] O.Ravi, G.Ramkumar and M.Kamarajand M.L Thivagar , Mildly supra normal spaces and some maps, International Journal of Advances in Pure and Applied Mathematics, 1(4)(2011). [8] O.Ravi, G.Ramkumar and M.Kamaraj, On supra sg – closed sets and supra gs – closed sets,International Journal of Mathematical Archive – 2(11), (2011), 2413 – 2419. [9] O.R . Sayed and Takashi Noiri, On supra b – open sets and supra b – continuity on topological spaces, European Journal of Pure and Applied Mathematics, Vol 3, No.2, (2010), 295 – 302. [10] O.R Sayed , Supra pre – open sets and supra
REFERENCES [1] I. Arockiarani and M. Trinita Pricilla, On generalized b - regular closed sets in supra topological spaces, Asian Journal of Current Engineering and Maths 1, 1(2012) 1- 4.
IJSER © 2012 http://www.ijser.org
pre – continuity on topological spaces, Scientific Studies and Research Series Mathematics and Informatics, 20(2)(2010), 79 – 88.
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
12
ISSN 2229-5518
Mathematical Applications of Queueing Theory in Traffic Congestion V. S. Selvi and P. Sathya Abstract - Queueing theory has a wide range of applications. In this paper, we discuss various problems faced because of traffic. We also summarize the different procedures to measure traffic in different systems. Index Terms - Queues, Traffic, Erlang distribution.
—————————— ——————————
1. INTRODUCTION RAFFIC congestion is a condition on road networks that occurs as use increases, and is characterized by slower speeds, longer trip times, and increased vehicular queueing. The most common example is the physical use of roads by vehicles. When traffic demand is great, then the interaction between vehicles slows the speed of the traffic stream. This results in some congestion. As demand approaches the capacity of a road (or of the intersections along the road), extreme traffic congestion sets in. When vehicles are fully stopped for periods of time, this is colloquially known as a traffic jam or traffic snarl-up.
T
Traffic congestion occurs when a volume of traffic or modal split generates demand for space greater than the available road capacity; this point is commonly termed saturation. There are a number of specific circumstances which cause or aggravate congestion; most of them reduce the capacity of a road at a given point or over a certain length, or increase the number of vehicles required for a given volume of people or goods. About half of U.S. traffic congestion is recurring, and is attributed to sheer weight of traffic; most of ————————————————
V. S. Selvi is currently serving in the Department of Mathematics, Theivanai Ammal College for Women, Viluppuram,, India
P.Sathya is currently pursuing. Phil. degree program in Mathematics, Theivanai Ammal College for Women, Viluppuram, India
the rest is attributed to traffic incidents, road work and weather events. Traffic research still cannot fully predict under which conditions a "traffic jam" (as opposed to heavy, but smoothly flowing traffic) may suddenly occur. It has been found that individual incidents (such as accidents or even a single car braking heavily in a previously smooth flow) may cause ripple effects (a cascading failure) which then spread out and create a sustained traffic jam when, otherwise, normal flow might have continued for some time longer. The erlang is a dimensionless unit that is used in telephony as a statistical measure of offered load or carried load on service-providing elements such as telephone circuits or telephone switching equipment. It is named after the Danish telephone engineer A. K. Erlang, the originator of traffic engineering and queueing theory.
2. TRAFFIC MEASUREMENTS IN A TELEPHONE CIRCUIT When used to represent carried traffic, a value (which can be a non-integer such as 43.5) followed by ―erlangs‖ represents the average number of concurrent calls carried by the circuits (or other service-providing elements), where that average is calculated over some reasonable period of time. The period over which the average is calculated is often one hour, but shorter periods (e.g., 15 minutes) may be used where it is known that there are short spurts of demand and a traffic measurement is desired that does not mask these spurts. One erlang of carried traffic refers to a single resource being in continuous use, or two channels being in use fifty percent of the time, and so on. For example, if an office has two telephone
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
13
ISSN 2229-5518
operators who are both busy all the time, that would represent two erlangs (2 E) of traffic; or a radio channel that is occupied for one hour continuously is said to have a load of 1 Erlang. When used to describe offered traffic, a value followed by erlangs represents the average number of concurrent calls that would have been carried if there were an unlimited number of circuits (that is, if the call-attempts that were made when all circuits were in use had not been rejected). The relationship between offered traffic and carried traffic depends on the design of the system and user behavior. Three common models are a) callers whose call-attempts are rejected go away and never come back, b) callers whose call-attempts are rejected try again within a fairly short space of time, and c) the system allows users to wait in queue until a circuit becomes available. A third measurement of traffic is instantaneous traffic, expressed as a certain number of erlangs, meaning the exact number of calls taking place at a point in time. In this case the number is an integer. Traffic-level-recording devices, such as moving-pen recorders, plot instantaneous traffic. The concepts and mathematics introduced by Agner Krarup Erlang have broad applicability beyond telephony. They apply wherever users arrive more or less at random to receive exclusive service from any one of a group of serviceproviding elements without prior reservation, for example, where the service-providing elements are ticket-sales windows, toilets on an airplane, or motel rooms. (Erlang‘s models do not apply where the server-providing elements are shared between several concurrent users or different amounts of service are consumed by different users, for instance, on circuits carrying data traffic.) Offered traffic (in erlangs) is related to the call arrival rate, λ, and the average call-holding time, h, by
, provided that h and λ are expressed using the same units of time (seconds and calls per second, or minutes and calls per minute). The practical measurement of traffic is typically based on continuous observations over several days or weeks, during which the instantaneous traffic is recorded at regular, short intervals (such
as every few seconds). These measurements are then used to calculate a single result, most commonly the busy hour traffic (in erlangs). This is the average number of concurrent calls during a given one-hour period of the day, where that period is selected to give the highest result. (This result is called the time-consistent busy hour traffic). An alternative is to calculate a busy hour traffic value separately for each day (which may correspond to slightly different times each day) and take the average of these values. This generally gives a slightly higher value than the time-consistent busy hour value. The goal of Erlang‘s traffic theory is to determine exactly how many service-providing elements should be provided in order to satisfy users, without wasteful over-provisioning. To do this, a target is set for the grade of service (GoS) or quality of service (QoS). For example, in a system where there is no queuing, the GoS may be that no more than 1 call in 100 is blocked (i.e., rejected) due to all circuits being in use (a GoS of 0.01), which becomes the target probability of call blocking, Pb, when using the Erlang B formula. There are several Erlang formulae, including Erlang B, Erlang C and the related Engset formula, based on different models of user behavior and system operation. These are discussed below, and may each be derived by means of a special case of continuous-time Markov processes known as a birth-death process. The busy-hour carried traffic, Ec, is measured on an already-overloaded system, with a significant level of blocking, it is necessary to take account of the blocked calls in estimating the busy-hour offered traffic Eo (which is the traffic value to be used in the Erlang formula). The offered traffic can be estimated by Eo = Ec/(1 - Pb). For this purpose, where the system includes a means of counting blocked calls and successful calls, Pb can be estimated directly from the proportion of calls that are blocked. Failing that, Pb can be estimated by using Ec in place of Eo in the Erlang formula and the resulting estimate of Pb can then be used in Eo = Ec/(1 - Pb) to estimate Eo. Another method of estimating Eo in an overloaded system is to measure the busy-hour call arrival rate, λ (counting successful calls and blocked calls), and the average call-holding time (for successful calls), h, and then estimate Eo using the formula E = λh. For a situation where the traffic to be handled is completely new traffic, the only choice is to try to model expected user behavior, estimating active user population, N, expected level of use, U
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
14
ISSN 2229-5518
(number of calls/transactions per user per day), busy-hour concentration factor, C (proportion of daily activity that will fall in the busy hour), and average holding time/service time, h (expressed in minutes). A projection of busy-hour offered traffic would then be Eo = (NUC/60)h erlangs. (The division by 60 translates the busy-hour call/transaction arrival rate into a per-minute value, to match the units in which h is expressed). Erlang-B also known as the Erlang loss formula, is a formula for the blocking probability derived from the Erlang distribution to describe the probability of call loss on a group of circuits (in a circuit switched network, or equivalent). It is, for example, used in planning telephone networks. The formula was derived by Agner Krarup Erlang and is not limited to telephone networks, since it describes a probability in a queuing system (albeit a special case with a number of servers but no buffer spaces for incoming calls to wait for a free server). Hence, the formula is also used in certain inventory systems with lost sales. The formula applies under the condition that an unsuccessful call, because the line is busy, is not queued or retried, but instead really lost forever. It is assumed that call attempts arrive following a Poisson process, so call arrivals are independent. Further it is assumed that message length (holding times) are exponentially distributed (Markovian system) although the formula turns out to apply under general holding time distributions. Erlangs are a dimensionless quantity calculated as the average arrival rate, λ, multiplied by the average call length, h. The Erlang B formula assumes an infinite population of sources (such as telephone subscribers), which jointly offer traffic to N servers (such as links in a trunk group). The rate of arrival of new calls (birth rate) is equal to λ and is constant, not depending on the number of active sources, because the total number of sources is assumed to be infinite. The rate of call departure (death rate) is equal to the number of calls in progress divided by h, the mean call holding time. The formula calculates blocking probability in a loss system, where if a request is not served immediately when it tries to use a resource, it is aborted. Requests are therefore not queued. Blocking occurs when there is a new request from a source, but all the servers are already busy. The formula assumes that blocked traffic is immediately cleared. The formula provides the GoS (grade of service) which is the probability Pb that a new call arriving at the circuit group is
where
Pb is the probability of blocking m is the number of resources such as servers or circuits in a group E=𝜆 is the total amount of traffic offered in erlangs
This may be expressed recursively as follows, in a form that is used to simplify the calculation of tables of the Erlang B formula:
B(E,0) = 1 𝐸𝐵(𝐸,𝑗 −1) B(E , j) =
𝐸𝐵 𝐸,𝑗 −1 +𝑗
for all j = 1,2,…,m. Typically, instead of B(E,m) the inverse 1/B(E,m) is calculated in numerical computation in order to ensure numerical stability: 1
𝐵(𝐸,0) 1 𝐵(𝐸,𝑗 )
= 1+
𝑗
=1
1
𝐸 𝐵(𝐸,𝑗 −1)
,
for all j = 1,2,…,m. The Erlang B formula applies to loss systems, such as telephone systems on both fixed and mobile networks, which do not provide traffic buffering, and are not intended to do so. It assumes that the call arrivals may be modeled by a Poisson process, but is valid for any statistical distribution of call holding times with finite mean. Erlang B is a trunk sizing tool for voice switch to voice switch traffic. The Erlang B formula is decreasing and convex in m. Extended Erlang B is an iterative calculation, rather than a formula, that adds an extra parameter, the Recall Factor, which defines the recall attempts. The steps in the process are as follows: 1. Calculate 𝑃𝑏 =B(E,m) as above for Erlang B. 2. Calculate the probable number of blocked calls
IJSER © 2012 http://www.ijser.org
a. 𝐵𝑒 =E𝑃𝑏
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
15
ISSN 2229-5518
3.
Calculate the number of recalls, R assuming a Recall Factor, 𝑅𝑓 :
R = 𝐵𝑒 𝑅𝑓 4. Calculate the new offered traffic
determine the probability of congestion occurring within a telephonycircuit group. It deals with a finite population of S sources rather than the infinite population of sources that Erlang assumes. The formula requires that the user knows the expected peak traffic, the number of sources (callers) and the number of circuits in the network.
3. CONCLUSION
𝐸𝑖+1 = 𝐸0 +R
After explaining the concepts of traffic in some systems, we have described the different erlang units used to measure traffic.
where 𝐸0 is the initial (baseline) level of traffic. 5. Return to step 1 and iterate until a stable value of E is obtained.
REFERENCES
The Erlang C formula expresses the waiting probability in a queuing system. Just as the Erlang B formula, Erlang C assumes an infinite population of sources, which jointly offer traffic of Aerlangs to N servers. However, if all the servers are busy when a request arrives from a source, the request is queued. An unlimited number of requests may be held in the queue in this way simultaneously. This formula calculates the probability of queuing offered traffic, assuming that blocked calls stay in the system until they can be handled. This formula is used to determine the number of agents or customer service representatives needed to staff a call centre, for a specified desired probability of queuing.
𝑃𝑊 =
𝐴𝑁 𝑁 𝑁 ! 𝑁 −𝐴 𝑖 𝑁 𝑁 𝑁 −1 𝐴 + 𝐴 𝑖=0 𝑖! 𝑁 ! 𝑁 −𝐴
[2] Donald Gross Carl M.Harris, Fundamentals of Queueing Theory, Third Edition, Wiley India, 1998. [3] G.Srinivasan Operation Research Principles of Applications, PHI Learning Private Limitted.New Delhi, 2007. [4] E. Pgge, Introduction of Queuing Theory in operation Research, 1972. [5] Robert B. Cooper, Introduction to Queuing Theory, 1972. [6] Jean Walrand, An Introduction to Queuing Networks, 1988.
where
[1] Churchman, C.West,Russel L.Ackott, E.Leonard Arnoff, Introduction to Operation Reseach, .New York; John Wiley and sons, Inc, 1963.
A is the total traffic offered in units of erlangs N is the number of servers 𝑃𝑊 is the probability that a customer has to wait for service
It is assumed that the call arrivals can be modeled by a Poisson process and that call holding times are described by a negative exponential distribution. A common use for Erlang C is modeling and dimensioning call center agents in a call center environment. The Engset calculation is a related formula, named after its developer, T. O. Engset, used to IJSER © 2012 http://www.ijser.org
[7] H. M. Wagner, Principles of Operation Research, 1972. [8] G. F. Newell, Applications of Queuing Theory, 1982. [9] Guoping Zeng, Two common properties of the ERLONG-B Function, ERLANG-C Function and Engset blocking function, Elseuier science (2003).
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
16
ISSN 2229-5518
Solution and Stability of a Mixed Type Functional Equation in RN-Spaces K. Ravi and P. Narasimman Abstract - In this paper, we obtain the general solution and investigate the generalized Hyers-Ulam Rassias stability problem for the following new mixed type additive and quadratic functional equation
f (2 x y) f (2 y z ) f (2 z x) 2 f ( x y) f ( y z ) f ( x z ) f ( x) f ( y ) f ( z ) in random normed spaces with the sense of sherstnev under arbitrary t-norms. Index Terms – Random normed space, Additive functional equation, Quadratic functional equation, Generalized Hyers-Ulam stability.
—————————— ——————————
for all x, y E where and p are constants with 0 and p 1 . Then there exists a unique additive mapping T : E E such that
1.INTRODUCTION AND PRELIMINARIES N 1940, S.M.Ulam[28] presented a list of Istability unsolved problems. One of the problem is the problem. It stated as follows: Suppose that a group G and a metric group H are given. For any 0 , does there exist a 0 such that if a function f : G H satisfies the inequality
d ( f ( xy), f ( x, f ( y))
all x, y G , then a homomorphism a : G H exist with d ( f ( x), a( x)) for all x in G ?.
for
In 1941, D.H.Hyers[12] answered Ulam‘s problem for the case of approximately additive functions under the assumption that G and H are Banachspaces. Hyers result was further generalized by Th.M.Rassias[25]. He proved the following theorem. Theorem 1.1: Let f : E E be a mapping from normed vector space E into a Banachspace E subject to the inequality
f ( x y ) f ( x) f ( y ) x
p
y
p
(1.1)
2 p x (1.2) p 22 for all x E . If p 0 then the inequality (1.1) holds for all x, y 0 and (1.2) for x 0 . f ( x) T ( x)
Also if the function t f (tx) from in to E is continuous for each fixed x E , then T is linear. In 1991, Z.Gajada[5] answered the question raised by T.M.Rassias that his theorem also holds good for p 1. This new concept is known as Hyers-Ulam-Rassias stability of functional equation (see [1, 3, 4, 6, 9-11]). In 1982-1998, J.M.Rassias [18-22] generalized the result of Th.M.Rassias and proved the following theorem. Theorem: 1.2. Let X be a real-normed linear space and let Y be real-complete-normed linear space. Assume in addition that f : X Y is an approximately additive mapping for which there exist constants 0 and p, q such that r p q 1 , and f satisfies the CauchyGavruta-Rassias inequality
f ( x y ) f ( x) f ( y ) x
——————————————
K. Ravi is serving in the Department of Mathematics, Sacred Heart College, Tirupattur, India. E-mail:
[email protected]
p
y
p
for all x, y X . Then there exists a unique additive mapping L : X Y satisfying
P. Narasimman is pursuing Ph.D. degree in Mathematics, Bharathiar University, Coimbatore India. E-mail:
[email protected]
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
17
ISSN 2229-5518
f ( x ) L( x )
2 2 r
x
quadratic and additive type functional equation of the form
r
for all x X . If in addition f : X Y is a mapping such that the transformation t f (tx) is continuous in t for each fixed x X , then L is -linear mapping. The stability concept that was introduced by Th.M.Rassias and J.M.Rassias provided a lot of influence to a number of mathematicians to develop the notion of what is known today the term Hyers-Ulam-Rassias stability of the linear mapping. Since then, the stability of several functional equations has been extensively investigated by several mathematicians (see [2, 8, 14, 23, 24]). In 2002, J.M.Rassias[17] estabilished the Ulam stability of the following mixed-type functional equation
3 3 f xi f ( xi ) f ( xi x j ) 1i j 3 i 1 i 1 on restricted domain. P.Nakmalachalasint [16] generalized the J.M.Rassias work to the following n-dimensional mixed-type functional equation n n f xi (n 2) f ( xi ) f ( xi x j ) i 1 1i j n i 1
f ( x ay) af ( x y) f ( x ay) af ( x y) for any integer a with a 1,0,1. A.Najati and M.B.Moghimi [15] dealt the functional equation
f (2 x y ) f (2 x y ) (1.3) f ( x y ) f ( x y ) 2 f (2 x) 2 f ( x) which is derived from quadratic and additive functions and established the general solution of equation (1.3) and investigated the Hyers-UlamRassias stability for equation (1.3). Before we proceed to the main theorems, we present the necessary terminologies notations and definitions which will be useful to do our main theorems concerning random normed space. In this study the space of all probability distribution functions is denoted by
F : R , 0,1: F (0) 0 and F () 1 where F is left continuous and non-decreasing on R . Also the subset is the set
D F : l F () 1
when n 2 and investigated its generalized Ulam-Gavruta-Rassias stability. E.Eshaghi Gordji and etal [7] obtained general solution and investigated the generalized Hyers-Ulam-Rassias stability for the following Mixed- type functional equations
4[ f (3x y ) f (3x y )]
where l f ( x) denotes the left limit of the
function f at the point x , l f ( x) lim f (t ) . t x
The space is partially ordered by the usual point-wise ordering of functions, i.e., F G if and only if F (t ) G(t ) for all t R . The
maximal element for in this order is the distribution function given by:
12[ f ( x y ) f ( x y )] 12[ f (2 x y ) f (2 x y )] 8 f ( y) 192 f ( x) f (2 y ) 30 f (2 x) and f ( x ky ) f ( x ky )]
0, if t 0, 1, if t 0.
0 (t )
k 2 f ( x y ) k 2 f ( x y ) 2(1 k 2 ) f ( x)
Definition 1.3. ([26]). A mapping
k 0, 1. In 2005, K.W. Jun and H.M. Kim [13] obtained the general solution of a generalized IJSER © 2012 http://www.ijser.org
T : 0,1 0,1 0,1
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
18
ISSN 2229-5518
is a continuous- norm, if T satisfies the following conditions:
t
(RN2) x (t ) x
1. T is commutative and associative;
and t 0 ;
2. T is continuous; 3. T (a, 1) = a for all a 0,1 ;
x y (t s) T (x (t ), y (s)) for all x, y X and t , s 0 . Clearly every normed space X , defines a RN-space (X, μ, TM), (RN4)
4. T (a, b) T (c, d ) whenever a c and b ≤ d for all a, b, c, d 0,1.
Typical examples of continuous t norm are T (a, b) min (a, b) and T (a, b) ab ,
TL (a, b) max (a b 1,0) (the Lukasiewicz t norm ). Now t norm are recursively defined by T 1 T and
all
n2
t t x
for all t > 0,
and TM is the minimum. t- norm. This space is called the induced random normed space. Definition 1.5. Let (X, μ, T) be an RN-space. A sequence xn in X is said to be convergent to x
whenever n N .
xi 0,1 , for all T 1, 2,..., n 1. The t norm T is Hadzic type if for given 0,1 there is 0,1 such that for
where x (t )
in X if, for every t 0 and 0 there exists positive integer N such that xn x (t ) 1
T n ( x1 , x2 , x3 ,..., xn1 ) T T n1 ( x1 , x2 , x3 ,..., xn ), xn1
for all x X , 0
and
T m (1 ,...,1 ) 1 , m N .
Definition 1.6. Let (X, μ, T) be an RN-space. A sequence xn in X is called Cauchy sequence if, for every t 0 and 0 there exists positive integer N such that xn xm (t ) 1 whenever
n m N.
T (a, b) min(a, b) .
Definition 1.7. A RN-space (X, μ, T) is said to be complete if and only if every Cauchy sequence in X is convergent to a point in X.
Recall that if T is a t – norm and xn is a given
Theorem 1.8. ([26]). If (X, μ, T) is an RN-space
A typical example of such t- norm is
n i 1 i
sequence of numbers in [0, 1], T x is defined recursively by
and xn is a sequence such that
xn x then lim xn (T ) x (T )
Ti11 xi xi and Ti n1 xi T (Ti n11xi , xn ) for n 2 is defined as
lim Ti n1 xi .
n
almost everywhere.
n
Definition 1.4. ([27]). A random normed space (briefly, RN space) is a triple (X, μ, T), where X is a vector space, T is a continuous t- norm and μ is
In this paper, we are discussing a new mixed type of additive and quadratic functional equation
f (2 x y ) f (2 y z ) f (2 z x)
a mapping from X into D such that the following conditions hold: (RN1)
x (t ) 0 (t ) for all t > 0 if and only if x = 0;
2 f ( x y) f ( y z ) f ( x z )
(1.4)
f ( x) f ( y ) f ( z ) te its general solution and studied its stability in random normed spaces with the sence of sherstnev under arbitrary t- norms. IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
19
ISSN 2229-5518
In Section-2, we investigate the General Solution of the Functional Equation (1.4) and in Section-3, we discuss the stability of functional equation (1.4) in random normed spaces with the sence of sherstnev under arbitrary t-norm.
2 fe ( x y) f e ( y z ) f e ( x z ) f e ( x) f e ( y ) f e ( z ) for all x, y, z X . This means that f e holds in (1.4). Similarly we can show that f e satisfies
2. THE GENERAL SOLUTION OF THE FUNDAMENTAL EQUATION (1.4) In this section we establish the general solution of functional equation (1.4). Theorem 2.1. Let X and Y be a vector spaces, and let f : X Y be a function satisfies (1.4). Then the following assertions hold a) If f is even function, then f is quadratic b) If f is odd function, then f is additive Proof: a) By putting x y z 0 in (1.4), we get f (0) 0 . By evenness of f , equation (1.4) can be written as
f (2 x y ) f (2 y z ) f (2 z x) 2 f ( x y ) f ( y z ) f ( x z )
(1.4). By above theorem, f e and f e are quadratic and additive respectively. Thus there exists a unique symmetric bi-additive function B : X X Y such that fe ( x) B( x, x) for all
x X . Put A( x) fo ( x) for all x X . It
follows that f ( x) B( x, x) A( x) for x X . The proof of the converse is trivial.
3. STABILITY OF THE FUNCTIONAL EQUATION (1.4) In the section, the authors present the stability for the functional equation (1.4) in random normed space. Throughout this section, assume that X is a real linear space and (Y , , T ) is a complete RNspace. Theorem 3.1. Let f : X Y be a function with
(2.1)
f (0) 0 for which there is : X X D with the property:
f ( x) f ( y ) f ( z )
f (2 x y ) f (2 y z ) f (2 z x ) (t ) x , y , z (t )
x, y, z X . Setting ( x, y, z) ( x,0,0), ( x, x,0)
2 f ( x y ) f ( y z ) f ( x z ) f ( x ) f ( y ) f ( z )
and ( x, y, y) in (2.1), we obtain the following equations
f (2 x) 4 f ( x) , f (3x) 9 f ( x) and
f (2 x y ) f ( x 2 y ) 4 f ( x y ) f ( x) f ( y ) all x, y X . ( x, y, z) ( x, y,0) in (2.1), we obtain
respectively,
for
(2.2) Setting
f (2 x y) f ( y) 2 f ( x y) 2 f ( x) (2.3)
f e (2 x y ) f e (2 y z ) f e (2 z x) f (2 x y ) f (2 x y ) 1 f (2 y z ) f (2 y z ) 2 f (2 z x) f (2 z x)
all
(3.1)
for all x, y, z X and all t 0 . If
22 n i t 2i n 1 x ,2i n 1 x ,0 2 22 n i t i n 1 i n 1 2 x ,2 2 x ,0 lim Ti 1 1 2 n i n 2 t i n 1 2 x ,0,0 5 i n 1 22 ni t 22 x ,0,0
and lim 2n x,2n x,2n z 2 t 1 n
2n
(3.2)
(3.3)
for all x, y, z X and all t 0 , then there exists a unique quadratic mapping Q : X Y such that IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
20
ISSN 2229-5518
f (2 x )2 f ( x )Q ( x ) (t ) 2i t i 2i 1 x ,2i 1 x ,0 2i 1 x ,22i 1 x ,0 2 t 2 (3.4) Ti 1 i i 1 2 t i 1 2i t 22 x ,0,0 2 x ,0,0 5 for all x, y X and all t 0 .
Then we conclude that
g (2 x )4 g ( x ) (t ) x , x , x (t ) for all x X . Thus we have
g (2 x ) 2
Proof. Putting y, z 0 in (3.1), we get
t (3.5) 5 f (2 x )15 f ( x )5 f ( x ) (t ) x,0,0 5 for all x X . Putting ( x, y, z ) ( x, x,0) and ( x, 2 x,0) in (3.1) and adding the resultant
2
g ( x)
4 f (2 x )7 f ( x )5 f ( x ) 2 f (4 x ) f ( 2 x ) (t ) (3.6)
g (2
k 1
t t (3.7) x , x ,0 x ,2 x ,0 t x ,0,0 2 5 for all x X . Setting ( x, y, z ) (2 x,0,0) in
triangle inequality from 1
g (2 2
n
x)
2n
g ( x)
(t )
t Tkn01 g (2k 1 x ) g (2k x ) k 1 2 ( k 1) 2 k 2 2 2
t
f (4 x )6 f (2 x )8 f ( x ) (t ) x , x ,0 2
(3.15)
2 t
Tkn01 2k x ,2k x ,2k x 2k 1 t
(3.8)
Ti n1
for all x X . Let
i
2i 1 x ,2i 1 x ,2i 1 x
for all x X and all t 0 . In order to prove the convergence of the sequence
(3.9)
g (2n x ) 22 n
, we replace
x with 2m x in (3.15) to obtain that g (2 x ) g (2 x ) t
for all x X . Then equation (3.8) becomes
nm
22 ( n m )
m
22 m
Ti n1 2i m1 x ,2i m1 x,2i m1 x (2i 2 m t )
(3.10)
for all x X and all t 0 . Let g : X Y be a mapping defined by
g ( x) f (2 x) 2 f ( x) .
1 1 1 2 ... n , it 2 2 2
follows that
(3.1) and adding the resultant equation with (3.7), we arrive
t x ,2 x ,0 t x ,0,0 2 x ,0,0 t 5
t k 1 k 1 2k x ,2k x ,2k x (2 t ) (3.14) 2
for all x X , t 0 and all k N . By the
9 f (2 x )8 f ( x ) 2 f (4 x ) f ( 2 x ) (t )
f (4 x )6 f (2 x)8 f ( x) (t ) x, x, x (t )
(t ) 2k x,2k x,2k x (22( k 1) t ) (3.13)
k 1
x ) g (2k x ) 2k 2( k 1) 2 2
g (2
for all x X . Adding (3.5) and (3.6), we obtain
t t x ,2 x ,0 t x ,0,0 2 x ,0,0 t 5
(3.12)
for all x X and all t 0 . Hence
x ) g (2k x ) 2k 2 ( k 1) 2 2
x , x , x (t ) x , x ,0 2
(t ) x , x , x (22 t )
for all x X and all k N . This means that
equations, we arrive
t x , x ,0 x ,2 x ,0 t 2
(3.11)
(3.16)
Since the right hand side of the inequality (3.16) tends to 1 as m and n tend to infinity, the sequence
IJSER © 2012 http://www.ijser.org
g (2n x ) 22 n
is a Cauchy sequence. Thus we
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
21
ISSN 2229-5518
g (2n x) for all x X . n 22 n
may define Q( x) lim
Now we show that Q is a quadratic mapping. Replacing x, y with respectively, we get
2n x and
g (2 x y ) g (2 y z ) g (2 z x ) (t ) 2 2 g ( x y ) g ( y z ) g ( x z ) g ( x ) g ( y ) g ( z )
n
2n y in
x ,2n y ,2n z
(3.1),
Taking the limit as n , we find that Q satisfies (1.4) for all x, y X . By Lemma 2.1 the mapping Q : X Y is quadratic. Letting the limit as n in (3.15), we get (3.4) by (3.9). Finally, to prove the uniqueness of the quadratic mapping Q subject to (3.4), let us assume that there exists another quadratic mapping Q which satisfies (3.4). Since
Q(2 x) 2 Q( x), Q(2 x) 2 Q( x) 2n
n
n
x ) Q (2n x )
2n t 2i n 1 x ,2i n 1 x ,0 2 2n t 2i n 1 x ,22i n 1 x ,0 lim Ti 1 1 n n i n 1 2 t 2 x ,0,0 5 i n 1 2n t 22 x ,0,0
(3.20)
and
lim 2n x,2n x,2n z 2n t 1
2n
n
for all x X and n N , from (3.4), it follows that
Q ( x )Q( x ) (2t ) Q (2
2 f ( x y ) f ( y z ) f ( x z ) f ( x ) f ( y ) f ( z )
for all x, y, z X and all t 0 . If
(22 n t )
(3.17)
n
Theorem 3.2. Let f : X Y be a function with f (0) 0 for which there is : X X D with the property: (3.19) f (2 x y ) f (2 y z ) f (2 z x ) (t ) x , y , z (t )
(3.21)
for all x, y, z X and all t 0 , then there exists a unique quadratic mapping A : X Y such that
f (2 x )4 f ( x ) A( x ) (t )
(22 n1 t )
22 n i t 2i n 1 x ,2i n 1 x ,0 2 2 n i 2i n 1 x ,22i n 1 x ,0 2 t Ti 1 , 2 n i 2 t i n 1 2 x ,0,0 5 22i n 1 x ,0,0 22 n i t T 22 n i t 2i n 1 x ,2i n 1 x ,0 2 2 n i 2i n 1 x ,22i n 1 x ,0 2 t Ti 1 2 n i 2 t i n 1 2 x ,0,0 5 22i n 1 x ,0,0 22 n i t (3.18)
t 2i 1 x ,2i 1 x ,0 2 2i 1 x ,22i 1 x ,0 t (3.22) Ti 1 t 2i 1 x ,0,0 22i 1 x ,0,0 t 5 for all x, y X and all t 0 . Proof. The steps are same as in Theorem 3.1 up to the equation (3.10). Let h : X Y be a mapping defined by g ( x) f (2 x) 4 f ( x) . Then we conclude that
h (2 x )2 h( x ) (t ) x, x, x (t ) for all x X . Thus we have
h (2 x ) 2
for all x X and all t 0 . By letting n in (3.18), we conclude that Q Q .
(3.23)
h ( x )
(t ) x , x , x (2t )
for all x X and all t 0 . Hence
IJSER © 2012 http://www.ijser.org
(3.24)
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
22
ISSN 2229-5518
h (2
k 1
x ) h (2k x ) k 1 2 2k
(t ) 2k x,2k x,2k x (2k 1 t )
(3.25)
for all x X and all k N . This means that
h (2
k 1
x ) h (2k x ) k 1 2 2k
t k 1 2k x ,2k x ,2k x (t ) 2
(3.26)
Taking the limit as n , we find that A satisfies (1.4) for all x, y X . By Lemma 2.1 the mapping A : X Y is additive. Letting the limit as n in (3.27), we get (3.22) by (3.9). Finally, to prove the uniqueness of the additive mapping A subject to (3.4), let us assume that there exists another additive mapping A which satisfies (3.4). Since
x X , t 0 and all k N . By the
for all
1
triangle inequality from
1 1 1 ... n 2 22 2
, it
follows
A(2n x) 2n A( x), A(2n x) 2n A( x) for all x X and n N , from (3.4), it follows that
t n 1 ( t ) T n k 0 x) h (2k 1 x ) h (2k x ) k 1 h ( x ) 2 2n 2k 2k 1
A( x ) A( x ) (2t ) A(2
h (2
n 1 k 0
T
Ti n1
2k x ,2k x ,2k x
t
n n
x with 2m x in (3.27) to obtain that nm
x ) h (2m x ) nm 2 2m
T
n i 1
t m
2i m 1 x ,2i m 1 x ,2i m 1 x
(2 t )
(3.28)
Since the right hand side of the inequality (3.28) tends to 1 as m and n tend to infinity, the sequence
is a Cauchy sequence. Thus we h (2n x ) 2n
may define
h(2n x) A( x) lim n 2n
2 h ( x y ) h ( y z ) h ( x z ) h ( x ) h ( y ) h ( z )
n
x ,2n y ,2n z
(3.30)
for all x X and all t 0 . By letting n in (3.30), we conclude that A A .
for all x X . Now we show that A is a additive mapping. Replacing x, y with 2n x and 2n y in (3.19), respectively, we get
h (2 x y ) h (2 y z )h (2 z x ) (t ) 2
(2n1 t )
2n t 2i n 1 x ,2i n 1 x ,0 2 n 2i n 1 x ,22i n 1 x ,0 2 t Ti 1 , n 2 t i n 1 2 x ,0,0 5 22i n 1 x ,0,0 2n t T n 2 t 2i n 1 x ,2i n 1 x ,0 2 n 2i n 1 x ,22i n 1 x ,0 2 t Ti 1 n i n 1 2 t 2 x ,0,0 5 22i n 1 x ,0,0 2n t
(3.27) for all x X and all t 0 . In order to prove the convergence of the sequence h (22 x ) , we replace
h (2
x ) A (2n x )
T A(2n x )h (2n x ) (2n t ), h (2n x ) A(2n x ) (2n t )
t
2i 1 x ,2i 1 x ,2i 1 x
n
Theorem 3.3. Let f : X Y be a function with
f (0) 0 for which there is : X X D with the property:
(2n t ) (3.29)
IJSER © 2012 http://www.ijser.org
f (2 x y ) f (2 y z ) f (2 z x ) (t ) x , y , z (t ) 2 f ( x y ) f ( y z ) f ( x z ) f ( x ) f ( y ) f ( z )
(3.31)
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
23
ISSN 2229-5518
for all x, y, z X and all t 0 . If
f (2 x )2 f ( x )Q ( x ) (t ) 2i t i 2i 1 x ,2i 1 x ,0 2i 1 x ,22i 1 x ,0 2 t 2 Ti 1 i i 1 2 t i 1 2i t 22 x ,0,0 2 x ,0,0 5
22 n i t 2i n 1 x ,2i n 1 x ,0 2 22 n i t 2i n 1 x ,22i n 1 x ,0 lim Ti 1 1 2 n i n i n 1 2 t 2 x ,0,0 5 i n 1 22 ni t 22 x ,0,0
And
2n t n 2in1 x ,2in1 x ,0 2in1 x ,22in1 x,0 2 t 2 lim Ti 1 (3.32) n n 2 t n in1 2 x ,0,0 5 22in1 x ,0,0 2 t
f (2 x )4 f ( x ) A( x ) (t ) t 2i 1 x ,2i 1 x ,0 2 2i 1 x ,22i 1 x ,0 t Ti 1 t t i 1 i 1 2 x ,0,0 22 x ,0,0 5
for all x X and all t 0 . So it follows from the last inequalities that
and
lim 2n x,2n x,2n z 2 t 1 = lim 2n x,2n x,2n z 2 t 2n
n
n
Q ( x ) A ( x ) 2 2
(t )
i 1 i 1 2i t i 1 i 1 2 2i t 2 x ,22 x ,0 2 x ,2 x ,0 i Ti 1 22 t i 2 2 t 2i 1 x ,0,0 22i 1 x ,0,0 5
n
(3.33) for all x, y, z X and all t 0 , then there exists a unique quadratic mapping Q : X Y and unique additive mapping A : X Y such that
2i 1 x ,2i 1 x ,0 t 2i 1 x ,22i 1 x ,0 2t Ti 1 2t 2i 1 x ,0,0 5 22i 1 x ,0,0 2t
f ( x )Q ( x ) A( x ) (t ) i 1 i 1 2i t i 1 i 1 2 2i t 2 x ,22 x ,0 2 x ,2 x ,0 i Ti 1 22 t i 2i 1 x ,0,0 22i 1 x ,0,0 2 2 t 5
f ( x )
for all x X and all t 0 . Hence we obtain (3.34)
by
letting
Q( x)
Q( x) 2
and
A( x) for all x X . The uniqueness 2 property of Q and A , are trivial. A( x)
2i 1 x ,2i 1 x ,0 t 2i 1 x ,22i 1 x ,0 2t Ti 1 2t 2i 1 x ,0,0 5 22i 1 x ,0,0 2t (3.34)
REFRENCES
for all x, y X and all t 0 .
Proof. By Theorem 3.1 and Theorem 3.2, there exist a quadratic mapping Q : X Y and a additive mapping A : X Y such that IJSER © 2012 http://www.ijser.org
[1] T. Aoki, On the stability of the linear transformation in Banach spaces, J. Math . Soc.Japan,2(1950), 64-66. [2] J.H.Bae, K.W.Jun and S.M.Jung, On the Stability of a Quadratic Functional
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
24
ISSN 2229-5518
Equations, Kyungpook (2003), 415 - 423.
Math.
J.,
43
[3] T. Bag and S .K. Samanta, Finite dimensional fuzzy normed linear spaces, J. Fuzzy Math.11 (3) (2003) 687-705. [4] G.L. Forti, Hyers -Ulam stability of functional equations in several variables, Aequationes Math., 50 (1995), 143 - 190. [5] Z. Gajada, On stability of additive mappings, Internat. J. Math. Math. Sci., 14(1991),431-434. [6] P. Gavruta, A generalization of the HyersUlam-Rassias Stability of approximately additive mapping, J. Math. Anal. Appl., 184 (1994), 431 - 436. [7] Eshaghi Gordji and H.Khodaei, Solution and Stability of Generalized Mixed type Cubic, Quadratic and Additive Functional Equation in quasi-Banach Spaces, Nonlinear Analysis, 71(2009)5629-5643. [8] A. Grabiec, The generalized Hyers-Ulam stability of a class of functional equations, Publ.Math. Debrecen, 48 (1996), 217 235. [9] D.H. Hyers, G. Isac and Th.M. Rassias, Stability of Functional Equations in Several Variables, Birkhauser, Basel, 1998. [10] D.H. Hyers, G. Isac and Th.M. Rassias, On the asymptoticity aspect of Hyers-Ulam stability of mappings, Proc. Amer. Math. Soc., 126 (1998), 425 - 430. [11] D.H. Hyers, G. Isac and Th.M. Rassias, Approximate homomorphisms, Aequationes Math., 44 (1992), 125 - 153. [12] D. H. Hyers, On the stability of the linear functional equation, Proc. Natl. Acad. Sci. 27 (1941) 222-224. [13] K.W.Jun, H.M. Kim, On the Hyers-UlamRassias stability of a generalized quadratic IJSER © 2012 http://www.ijser.org
and additive functional equation, Bull.Korean Math.Soc. 42, No:1 (2005), 133-148. [14] K.W. Jun and Y.H. Lee, On the HyersUlam-Rassias stability of a Pexiderized Quadratic inequality, Math. Ineq. Appl., 4(1) (2001), 93 - 118. [15] A.Najati and M.B.moghimi, Stability of a functional equation deriving from quadratic and additive functions in quasiBanach spaces, J.Math.Anal.Appl.337 (2008) 399-415. [16] P. Nakmahachalasint, On the Generalized Ulam-Gavruta-Rassias stability of MixedType Linear and Euler-Lagrange-Rassias Functional Equation, International Journal of Mathematics and Mathematical Sciences.,Vol.2007,Article ID 63239,10 pages. [17] J. M. Rassias, On the Ulam stability of the mixed type mappings on restricted domains, J. Math. Anal. Appl., 276(2002), 747-762. [18] J.M. Rassias, Solution of a problem of Ulam, J. Approx. Theory 57(1989), no. 3, 268-273. [19] J.M. Rassias, On a new approximation of approximately linear mapping by linear mappings, Discuss. Math. 7 (1985), 193196. [20] J.M. Rassias, On approximation of approximately linear mappings by linear mappings, Bull.Sci. Math. (2) 108 (1984), NO. 4, 445-446. [21] J.M. Rassias, On approximation of approximately linear mappings by linear mapping, J.Funct. Anal. 46 (1982),no. 1, 126-130. [22] J.M. Rassias, On the stability of the EulerLagrange functional equation, Chinese J.Math.,20 (1992),185-190.
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
25
ISSN 2229-5518
[23] K.Ravi R. Kodandan, P.Narasimman, Ulam stability of a quadratic Functional Equation, International Journal of Pure and Applied Mathematics, Vol. 51, No. 1,2009, 87-101. [24] Th.M. Rassias, On the stability of functional equations in Banach spaces, J. Math. Anal.Appl., 251 (2000), 264 - 284. [25] Th. M. Rassias, On the stability of the linear mapping in Banacb spaces, Proc. Amer. Math. Soc. 72 (1978) 297-300. [26] B.Schweizer and A.Sklar, Probabilistic Metric Spaces, Elsevier,North Holand, New York, 1983 [27] A.N.Sherstnev, On the notion of a random normed space, Dokl.Akad.Nauk SSSR 149(1963), 280-283(in Russian). [28] S.M. Ulam, A Colloection of the Mathematical Problems, Interscience Publ., New York, 1960.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
26
ISSN 2229-5518
Analysis of Worm Propagation in Computer Networks with A Discrete Epidemic Model M. Reni Sagaya Raj, A. George Maria Selvam and T.Sivagnanam Abstract - Computer worms are self replicating programs that run independently and self-propagating across computer networks. Computer worms have devastating effects on the economy. In order to defend against the worms, there is a need to understand the propagation mechanism of worm spreading. An effective worm propagation model helps us to develop strategies to guard against the worm attacks. In this paper, a modified epidemiological model is proposed. The model is constructed with difference equations and certain dynamical behavior is investigated. Numerical simulations are performed with MATLAB. Index Terms – Computer Network, virus, Epidemic model.
—————————— ——————————
1. INTRODUCTION is a program that copies itself without Aworm human intervention. Worms are malicious computer program codes. In order to prevent worms from propagating in networks, users need to understand and predict the dynamic behaviours of worm propagation in networks. There are different types of worms such as email worms, instant messaging (IM) worms, Internet worms, Internet Relay Chat (IRC) worms and file sharing networks worms and so on. Worms have enormous adverse impact on the Internet. Network worms have the potential to infect many vulnerable hosts on the Internet before human countermeasures take place. The aggressive scanning traffic generated by the infected hosts have caused network congestion, equipment failure, and blocking of physical facilities such as subway stations, 911 call centres, etc. The detection count of malicious programs in June 2012 was 25,399. The worm called Bancos steals IDs and passwords for on line banking. Code Red, SQL Slammers, and Sasser are some of the most famous examples of worms that have caused considerable damage. Jerusalem is one of the earliest worms discovered in 1987. Viruses cost
organizations millions of dollars. The TK worm inflicted an estimated $ 5.5m of damage across the Internet. In the following table, we present the damage caused by some of the famous worm in the history of Internet. Name of the worm Morris worm Melissa I Love You
February 2001
NIMDA
September 2001
Klez
October 26, 2001 January 25, 2003 January 2003
Blaster Mydoom
——————————————
A. George Maria Selvam is serving in the Department of Mathematics, Sacred HeartCollege, Tirupattur, India. T.Sivagnanam is serving in the Department of Mathematics, St. Joseph University, Dar Es Salaam, Tanzania.
1988 March 26, 1999 May, 3, 2000
Anna Kournikova Virus worm Code Red Sircam
SQL Slammer Sobig
W Sasser
M. Reni Sagayaraj is serving in the Department of Mathematics, Sacred HeartCollege, Tirupattur, India. E-mail:
[email protected]
Year
July 13, 2001 July 19, 2001
August 11, 2003 January 26, 2004 March 19, 2004 April 30, 2004
Damage in dollars 10 million 1.1 billion 8.75 billion 166,827 billion 2.6 billion 1.03 billion 645 million 18.9 billion 1.2 billion 36.1 billion 1.3 billion 38.5 billion 11 million 14.8 billion
As per the latest statistics, there are 2,267,233,742 Internet Users worldwide. Leading global cyber security firms in May 2012 announced the
IJSER © 2012 http://www.ijser.org
NTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
27
ISSN 2229-5518
detection of a sophisticated new type of malicious code on hundreds of computers throughout the Middle East, with particular concentration in Iran. The malicious code named Flame has been capturing sensitive user information such as screen shots, emails, documents and audio files using a computers microphone. Flame is a datamining virus that in May 2012 penetrated the computers of high-ranking Iranian officials, sweeping up information from their machines.
2.EPIDEMIC MODELS Mathematical modelling of infectious diseases can be traced back to Bernoulli (1790). Bernoulli developed mathematical models to study the spread smallpox. In 1906, Hamer formulated a model to investigate the spread of measles. In 1911, Dr. Ross described the transmission of malaria between human population and mosquitoes using a system of differential equations. Epidemic models with vital dynamics were constructed by Kermack and Mckendrick in 1927 [6]. A computer is susceptible to a worm if it could become infected with the worm, provided the worm is somehow introduced to the computer. In the SIR model, a machine stays in one of the following three states: susceptible state, infectious state and removed state. When an infectious machine is cleaned of worms, the machine becomes a removed machine and it is immune to the same type of worms. A susceptible machine may become an infectious machine with the possibility in a unit time. An infectious machine is cured and becomes a removed machine with the possibility in a unit time. At time t, S (t ) is the number of susceptible machines, I (t ) is the number of infectious machines and R(t ) is the number of removed machines. The corresponding differential equations are given by
dR(t ) I (t ) dt
S (t ) I (t ) R(t ) N where N is the total number of machines in the system. The process of worm propagation on the Internet is very similar to that of biological viruses in populations. It can pass from one computer to others like a biological virus between persons. Spreading of worms in computer network is epidemic in nature. Hence epidemic models have been applied to study the propagation of viruses and worms. Many authors analysed the process of worm propagation on the Internet based on the epidemic models [1, 5, 7, 9, 10].
3. MODEL DESCRIPTION In this model, the host machines recovering from the infective are allowed to go into a temporarily immune state. Let be the rate at which removals loose the immunization and becomes susceptible. The assumptions are formulated in to the following discrete SIRS model.
S (t 1) S (t )
N
S (t ) I (t ) R (t )
I (t 1) I (t )(1 )
S (t ) I (t )
(1)
N R (t 1) R (t )(1 ) I (t ) The initial conditions are
S (0) I (0) R(0) N where S (0), I (0), R(0) 0 . From the system of above equations (1), we find
S (t 1) I (t 1) R(t 1) S (t ) I (t ) R(t ) N .
dS (t ) S (t ) I (t ) dt dI (t ) S (t ) I (t ) I (t ) dt
If we replace R(t ) by N I (t ) S (t ) in (1), we obtain the following system of two equations in S and I ,
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
28
S (t 1) S (t )
N
S (t ) I (t ) [ N S (t ) I (t )]
I (t 1) I (t )(1 )
N
satisfies 0 2 1
There exists two equilibria for the system of equations (2) in S and I . They can be found by solving the following
S and I * . * * N
N
( 2 ) 1 * * J (S , I ) ( )
S *I *
2. S *
2
*
N ( ) N, I* . ( )
( 2 ) 0.
The equilibrium point is locally asymptotically stable if the eigen values of the Jacobian matrix J
The first equilibrium is the disease-free equilibrium and the second one is the endemic equilibrium. The Jacobian matrix has the form
1 N I J (S , I ) I N
( ) 1
We shall assume that
1. S N , I 0 *
. If
We shall continue with the analysis of the model and investigate the stability of the system at the second equilibrium point for various values of the parameters. At the second equilibrium point the Jacobian matrix has the form
(3)
Simplifying and solving the equations (3) simultaneously, we obtain the following two equilibrium solutions.
basic
then there exists disease-free equilibrium and it is locally asymptotically stable.
S I * [ N S * I * ]
I * I * (1 )
The
R(0) 1 ,
4. EQUILIBIRIUM POINTS
S* S
ISSN 2229-5518
reproduction number is defined as R(0)
S (t ) I (t )
(2)
equations in
if
1.
satisfy i 1 if and if only if Tr J 1 det J 2 [3, 8]. Hence
( 2 ) ( 2 ) 2 ( ) 2
S N 1 S N
2
At the disease-free equilibrium, the Jacobian matrix is 1 J ( N ,0) 1 0
yields
0 ( )( ) ( 2 )
The Jacobian matrix is upper triangular. Hence the eigen values are 1 1 and 2 1 . The disease free equilibrium is locally asymptotically stable if 1,2 1 . Suitably the restrictions can be imposed on the parameters such that 0 1 1 . The second eigen value
(4)
The equilibrium point is locally asymptotically stable if and only if (4) is satisfied.
5. NUMERICAL SIMULATIONS AND DISCUSSIONS In the following discussion we take N 100 . Now we take 0.2, 0.3 and 0.02 so that R(0) 1 . The Jacobian matrix is
IJSER © 2012 http://www.ijser.org
NTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
29
ISSN 2229-5518
Since R(0) 1 , the infection dies out. But most of the machines remain in susceptible state. Hence, they are vulnerable to another variant of the same worm.
1.02625 0.32 J 1 0.00625 For J ,
we
have det J 1.0243 . The
Tr J 2.02625 eigen
values
1 1.0597, 2 0.9665, 1 1 and 2 1 .
and are
Choosing the values 0.8, 0.2 and 0.1 and so R(0) 1 , the equilibrium point is E (25, 25) . Calculations show that Tr J 1.9 and det J 0.96 . Therefore
Tr J 1 det J 2 is satisfied. Hence equilibrium point E (25, 25) is locally asymptotically stable. Also the eigen values are
1 0.95 i0.2398 and
2 0.95 i0.2398
where i 0.9798 1 . Due to the fact R(0) 1 , the worm is not removed from all the machines and they continue to reside in the network and they pose a threat to the system. Hence the rate of removal should be accelerated. Considering 0.5, 0.2, 0.07 so that R(0) 1 , the equilibrium point is E (40,15.6) . For the Jacobian matrix J , we have Tr J 1.9922 and det J 1.01132 . Also det J 1 . The eigen values are 1,2 0.9961 i0.1449 and
1,2 1.0066 1 .
Hence the equilibrium E (40,15.6) is unstable.
6. CONCLUSION The paper discusses discrete-time epidemic model for worm propagation in computer networks with a modified SIR model allowing fraction of the hosts in the class R to go back in to susceptible state. Numerical simulation are presented for the cases R(0) 1 and R(0) 1 . This helps the organization to frame their policy regarding the IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
30
ISSN 2229-5518
use of Anti Virus software‘s and the frequency of updating the data base of the Anti Virus software.
REFERENCES [1] Bimal Kumar Mishra, Dinesh Saini, Mathematical models on computer viruses, Applied Mathematics and Computation, 187 (2007)929936.
[10] Vasileios Vlachos, Diomidis Spinellis, and Stefanos Androutsellis-Theotokis, Biological Aspects of Computer Virology, 3rd International Conference on e-Democracy, 23-25 September 2009, Athens, Greece. [11] Xiang Fan, Yang Xiang, Modelling the propagation of peer-to-peer worms, Future Generation Computer Systems, 26(2010), 1433 - 1443.
[2] Essam Al Daoud, Iqbal H. Jebril and Belal Zaqaibeh, Computer Virus Strategies and Detection Methods, Int. J. Open Problems Compt. Math., Vol. 1, No. 2, September 2008. [3] Leah Edelstein-Keshet, Mathematical Models in Biology, SIAM, Random House, New York, 2005. [4] Fangwei Wang, Yunkai Zhang, Jianfeng Ma, Defending passive worms in unstructured P2P networks based on healthy file dissemination, Computers and Security, 28(2009), 628 - 636. [5] Jonghyun Kim, Sridhar Radhakrishnan, Sudarshan K.Dhall, Measurement and analysis of worm propagation on Internet network Topology, ICCCN 2004. [6] J.D.Murray, Mathematical Biology I: An Introduction, 3-e, Springer International Edition, 2004. [7] Onwubiko.C, Lenagham A.P and Hebbes.L, An Improved worm mitigation model for evaluating the spread of aggressive network worms, EUROCON 2005. [8] L.Perko, Differential Equations and Dynamical Systems, 3-e, Springer - Verlag, New York Inc, 2001. [9] Jose R.C. Piqueira, Betyna Fernandez Navarro and Luiz Henrique Alvez Monteiro, Epidemic-logical Models Applied to Viruses in Computer Networks, Journal of Computer Science, 1 (1): 31 - 34, 2005.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
31
ISSN 2229-5518
Sum Labeling for Arbitrary Supersubdivision of Path, Cycle and Star J. Gerard Rozario, J. Jon Arockiaraj, P. Lawrence Rozario Raj and U. Rizwan
Abstract - A sum labeling is a mapping 𝜆 from the vertices of G into the positive integers such that, for any two vertices u, v 𝜖 V (G) with labels 𝜆(u) and 𝜆(v), respectively, (uv) is an edge iff 𝜆(u) + 𝜆(v) is the label of another vertex in V (G). Any graph supporting such a labeling is called a sum graph. It is necessary to add (as a disjoint union) a component to sum label a graph. This disconnected component is a set of isolated vertices known as isolates and the labeling scheme that requires the fewest isolates is termed optimal. The number of isolates required for a graph to support a sum labeling is known as the sum number of the graph. In this paper, we will give optimal sum labeling scheme for some cycle related graphs. Index Terms - Sum Labeling, Sum number, Sum graph, isolates
—————————— ——————————
1. INTRODUCTION considered here are simple, Afinitetheandgraphs undirected. For all terminologies LL
and notations we follow Harary [2] and graph labeling as in [1]. Sum labeling of graphs was introduced by Harary [3] in 1990. Following definitions are useful for the present study. Definition 1.1 A Sum Labeling is a mapping 𝜆 from the vertices of G into the positive integers such that, for any two vertices u, v 𝜖 V (G) with labels 𝜆(u) and 𝜆(v), respectively, (uv) is an edge iff 𝜆(u) + 𝜆(v) is the label of another vertex in V (G). Any graph supporting such a labeling is called a Sum Graph. ——————————————
J. Gerard Rozario is serving in the Department of Mathematics, St. Joseph’s College of Arts and Science, Cudallore, India. E-mail:
[email protected]
J. Jon Arockiaraj is serving in the Department of Mathematics, St. Joseph’s College of Arts and Science, Cudallore, India. E-mail:
[email protected]
P. Lawrence Rozario Raj is serving in the Department of Mathematics, St. Joseph College, Trichy, India. E-mail :
[email protected]
U. Rizwan is serving in the Department of Mathematics, Islamiah College, Vaniyambadi, India. E-mail :
[email protected]
efinition 1.2 It is necessary to add (as a disjoint union) a component to sum label a graph. This disconnected component is a set of isolated vertices known as Isolates and the labeling scheme that requires the fewest isolates is termed Optimal.
Definition 1.3 The number of isolates required for a graph G to support a sum labeling is known as the Sum Number of the graph. It is denoted as 𝜎 𝐺 .
Definition 1.4 Let G be a graph with q edges. A graph H is called a Super subdivision of G if H is obtained from G by replacing every edge ei of G by a complete bipartite graph K 2,mi for some mi, 1 i q in such a way that the end vertices of each ei are identified with the two vertices of 2vertices part of K 2,mi after removing the edge ei from graph G. If mi is varying arbitrarily for each edge ei then super subdivision is called arbitrary super subdivision of G. In this paper, we will prove that graphs obtained by arbitrary super subdivision of path 𝑃𝑛 , cycle 𝐶𝑛 and star 𝐾1,𝑛 are optimal summable with sum number 2.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
32
ISSN 2229-5518
2.OPTIMAL SUM LABELING SCHEME FOR ARBITRARY SUPER SUBDIVISION OF PATH, CYCLE AND STAR Sethuraman et.al [5], introduced a new method of construction called Supersubdivision of graph and proved that arbitrary supersubdivision of any path and cycle Cn are graceful. Kathiresan et.al [4], proved that arbitrary supersubdivision of any star is graceful. In this section, we prove that the arbitrary super subdivision of path 𝑃𝑛 , cycle 𝐶𝑛 and star 𝐾1,𝑛 are optimal summable with sum number 2. Theorem 2.1 Arbitrary supersubdivision of path 𝑃𝑛 are optimal summable with sum number 2. Proof. Let G be a path 𝑃𝑛 with n vertices. Let vi (1 i n) be the vertices of G. Let H be the arbitrary supersubdivision of G which is obtained by replacing every edge of G with 𝐾2,𝑚 𝑖 . Let 𝑚 = 𝑛−1 𝑚𝑖 . Let uj be the vertices which 1 are used for arbitrary supersubdivision of G where 1 j m. Let x and y be two isolated vertices. Therefore, the vertex set of H is
Figure 2.1 Theorem: 2.2 Arbitrary super subdivision of cycle 𝐶𝑛 is optimal summable with sum number 2. Proof. Let G be a cycle 𝐶𝑛 with n vertices. Let vi (1 i n) be the vertices of G. Let H be the arbitrary super subdivision of G which is obtained by replacing every edge of G with 𝐾2,𝑚 𝑖 . Let 𝑚 = 𝑛1 𝑚𝑖 . Let uj be the vertices which are used for arbitrary supersubdivision of G where 1 j m. Let x and y be two isolated vertices. Therefore, the vertex set of H is V(H) = { v1, v2,……,vn,u1,u2,……,um}. Define f : V(G) {1,2,3,…, N} 𝑓 𝑣𝑖 = 𝑖 ; 1 ≤ 𝑖 ≤ 𝑛 𝑓 𝑢1 = 𝑚 + 𝑛 𝑓 𝑢𝑗 = 𝑓 𝑢𝑗 −1 − 1 ; 2 ≤ 𝑗 ≤ 𝑚 Then 𝑓 𝑥 = 𝑓 𝑢1 + 1 𝑎𝑛𝑑 𝑓 𝑦 = 𝑓 𝑢1 + 2 Thus, we are able to identify all the edges of path with just two isolated vertices.
V(H) = { v1, v2,……,vn,u1,u2,……,um}. Define f : V(G) {1,2,3,…, N} 𝑓 𝑣𝑖 = 𝑖 ; 1 ≤ 𝑖 ≤ 𝑛 𝑓 𝑢1 = 𝑚 + 𝑛 𝑓 𝑢𝑗 = 𝑓 𝑢𝑗 −1 − 1 ; 2 ≤ 𝑗 ≤ 𝑚
Hence, arbitrary supersubdivision of cycle 𝐶𝑛 are optimal summable with sum number 2. Illustration 2.2 Sum labeling for arbitrary supersubdivision of cycle 𝐶5 is given in figure 2.2
Then 𝑓 𝑥 = 𝑓 𝑢1 + 1 𝑎𝑛𝑑 𝑓 𝑦 = 𝑓 𝑢1 + 2 Thus, we are able to identify all the edges of path with just two isolated vertices. Hence, arbitrary supersubdivision of path 𝑃𝑛 is optimal summable with sum number 2.
Illustration 2.1 Sum labeling for arbitrary supersubdivision of path 𝑃5 is given in figure 2.1 Figure 2.2 Theorem: 2.3 Arbitrary supersubdivision of star 𝐾1,𝑛 are optimal summable with sum number 2. IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
33
ISSN 2229-5518
Proof. Let G be a star 𝐾1,𝑛 with n+1 vertices. Let vi (1 i n+1) be the vertices of G. Let H be the arbitrary super subdivision of G which is obtained by replacing every edge of G with 𝐾2,𝑚 𝑖 . Let 𝑚 = 𝑛−1 𝑚𝑖 . Let uj be the vertices which 1 are used for arbitrary supersubdivision of G where 1 j m. Let x and y be two isolated vertices. Therefore, the vertex set of H is
[2]
Harary F, Graph theory, Addison Wesley, Reading, Massachusetts, 1972.
[3]
Harary F, Sum graphs and Difference graphs, Congress Numerantium, no.72, 101108, 1990.
[4]
K.M. Kathiresan, S. Amutha, ―Arbitrary supersubdivisions of stars are graceful‖, Indian Journal of pure and applied Mathematics. 35(1), pp. 81-84, 2004.
[5]
G. Sethuraman, P. Selvaraju, ―Gracefulness of arbitrary supersubdivisions of graphs‖, Indian Journal of pure and applied Mathematics, 32(7), pp. 1059-1064, 2001.
V(H) = { v1, v2,……,vn+1,u1,u2,……,um}. Define f : V(G) {1,2,3,…, N} 𝑓 𝑣𝑖 = 𝑖 ; 1 ≤ 𝑖 ≤ 𝑛 + 1 𝑓 𝑢1 = 𝑚 + 𝑛 + 1 𝑓 𝑢𝑗 = 𝑓 𝑢𝑗 −1 − 1 ; 2 ≤ 𝑗 ≤ 𝑚 Let x and y be two isolated vertices. Then 𝑓 𝑥 = 𝑓 𝑢1 + 1 𝑎𝑛𝑑 𝑓 𝑦 = 𝑓 𝑢1 + 2 Hence, arbitrary supersubdivision of star 𝐾1,𝑛 are optimal summable with sum number 2.
Figure 2.3 Illustration 2.3 Sum labeling for arbitrary supersubdivision of star 𝐾1,5 is given in figure 2.3
REFERENCES [1]
Gallian J A, A dynamic survey of graph labeling, The Electronics Journal of Combinatorics, 16, (2009) DS6. IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
34
ISSN 2229-5518
An Extreme Shock Maintenance Model for a Multistate Degenerative System Under a Bivariate Replacement Policy M. Mohamad Yunus, P. Govindaraju and U. Rizwan Abstract - In this paper, we consider a simple repairable multistate degenerative system which is subjected to random shocks from its environment. The long-run average cost for the extreme shock maintenance model of a degenerative multistate system under a bivariate replacement policy (T, N) , where T is the working age of the system and N is the number of failures of the system, is studied. Explicit expressions for the long-run average cost is given. Index Terms - Geometric Process, Replacement Policy, Renewal Reward Process, Shock models.
—————————— ——————————
1. INTRODUCTION
T
HE study of a multistate degenerative system in a maintenance model plays an important role in reliability. A multistate degenerative system is subject to damage and the damage occurs randomly in an operating stage. Most of the maintenance models just pay attention on the internal cause of the system failure, but do not on an external cause of the system failure. A system failure may be caused by some external cause, such as a shock. The shock models have been successfully applied to different fields, such as physics, communication, electronic engineering and medicine, etc. A very few authors considered the deteriorating systems interrupted by random shocks. Barlow and Proschen (1983) considered an imperfect repair model, in which a repair is perfect with probability p and a minimal repair with probability 1– p. There were many papers which consider extreme shock models. In their models, the system will fail if the amount of shock exceeds a specific threshold. In these ——————————————
U. Rizwan is serving in the Department of Mathematics, Islamiah College, Vaniyambadi, India. E-mail:
[email protected] P. Govindaraju is serving in the Department of Mathematics, Islamiah College, Vaniyambadi, India. E-mail :
[email protected] M. Mohamad Yunus is pursuing Ph.D. in Mathematics, Islamiah College, Vaniyambadi, India.
models, a shock is called a deadly shock or extreme shock. Thangaraj and Rizwan (2001) have introduced and studied the shock model with
NONN repair times are discussed an extended extreme shock maintenance model for a deteriorating system and so on. Chen and Li(2008) have introduced and studied the extreme shock model. The rest of the paper is organized as follows: In section 2, we present an extreme shock model for the maintenance problem of a multistate repairable system. In section 3, explicit expressions for the long-run average cost under a bivariate replacement policy (T , N ) is derived.
2. DESCRIPTION OF THE MODEL In this section, we first give some definitions. Next, we describe the model of a one-component multistate system. We also evaluate the conditional probabilities of the operating times and failure times given the state of the system. Definition 1 A random variable X is said to be stochastically smaller than another random variable Y , if P( X > ) P(Y > ) , for all real
. It is denoted by X st Y . A stochastic process
X n , n = 1,2,
is said to be stochastically
increasing, if X n st X n1 , for n = 1,2, .
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
35
ISSN 2229-5518
Definition 2 A Markov process X n , n = 1,2, with state space
0,1,2,
is said to be
stochastically monotone, if
X n1 | X n = i1 st X n1 | X n = i2 , for any 0 i1 i2 . Clearly, the stochastically monotone concept for a Markov process is defined and based on the transition probabilities from one state to another state, conditioning on the former state. However, the stochastically monotone concept for a stochastic process defined here is for a general process and is based on the conditional distribution of two successive random variables in the process.
i S (t ) = k j
if the systemis in the i th working state at time t (i = 1, 2, , k ) if the system is in the j th failure state at time t ( j = 1, 2, , l )
The set of working states is 1 = {1,2,, k} ; the set of failure states is 2 = {k 1, k 2,, k l} and the state space is = 1 2 . Initially, assume that a new system in working state 1 is installed. Whenever the system fails, it will be repaired. Let t n be the completion time of the n th repair, n = 0,1, with t0 = 0 and let sn be the time of occurrence of the n -th failure, n = 1,2, Then t0 < s1 < t1 < < sn < tn < .
Definition 3 A stochastic process X n , n = 1,2, is a geometric process, (GP) if there exist a constant a > 0 such that a n1 X n , n = 1,2, forms a renewal process. The number a is called the ratio of the geometric process.
0 < a < 1, then the GP is stochastically If increasing; if a > 1 , the GP is stochastically decreasing and if a = 1 , the GP will reduce to a renewal process. Definition 4 An integer valued random variable N is said to be a stopping time for the sequence of independent random variables X 1 , X 2 ,, if the
We next describe the probability structure of the model. Assume that the transition probability from working state i, i = 1,2,, k , to failure state
k j, j = 1,2,, l , is P(S (sn1 ) = k j | S (tn ) = i) = q j
with
l
q = 1.
j =1 j
Moreover,
the
transition
probability from failure state k j, j = 1,2,, l , to working state i, i = 1,2,, k is given by
P(S (tn ) = i | S (sn ) = k j ) = pi
k
p = 1.
event N = n is independent of X n1 , X n 2 , , for
with
all n = 1,2, .
Let X 1 be the operating time of the system after
We shall now describe the system states. Consider a one-component multistate system with k l states ( k -working states and l -failure states). The system state at time t is given by
i =1 i
installation. In general, let X n , n = 2,3, be the operating time of the system after (n 1) -st repair and Yn , n = 1,2, be the repair time after n -th failure. Assume that there exist a life-time distribution U (t ) and ai > 0, i = 1,, k such that
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
36
ISSN 2229-5518
P( X 1 t ) = U (t )
(1)
and P( X 2 t | S (t1 ) = i) = U (ait ), where
1 a1 a2 ak .
i = 1,2,, k
(2)
In
for
general,
i j 1,2,, k ,
it does in state i2 . Consequently, the k working states are arranged in decreasing order, such that state 1 is the best working state and state k is the worst working state. Similarly, for two failure states and such that k i1 k i2 k 1 k i1 < k i2 k l , we have
P X n t | S (t1 ) = i1 ,, S (tn1 ) = in1 = U (ai ai t ). (3) Similarly, assume that there exist a life-time distribution V (t ) and bi > 0, i = 1,2,, l such that
P(Y1 t | S (s1 ) = k i) = V (bit ),
(4)
where 1 b1 b2 bl > 0 and in general, for i j 1,2,, l,
P(Yn t | S ( s1 ) = k i1 ,, S ( sn ) = k in ) = V (bi bi t ) 1
(5)
n
In particular, if a1 = b1 = 1, a2 = = ak = a' and b2 = = bl = b' , then the (k l ) -state system reduces to a two-state system. In this case, equations (3) and (5) become
P X n t = U (a' ) n1 t
Y1 | S (s1 ) = k i1 st Y1 | S (s1 ) = k i2 .
n 1
1
Therefore, the failure state k i1 is better than the failure state k i2 in the sense that the system in state k i1 has a stochastically smaller repair time than it does in state k i2 . Thus, the l failure states are also arranged in decreasing order, such that the state k 1 is the best failure state and the state k l is the worst failure state. Consider a monotone process model for a multistate one-component system described in this section and make the following package of assumptions, A1 A10 . A1
At the beginning, a new system is installed. The system has (k l ) possible states, where the states 1,2,, k denote, respectively, the firsttype working state, the second-type working state , , k -th-type working state and the states (k 1), (k 2),, (k l ) denote, respectively, the first-type failure state, the second-type failure state and the l -th type failure state of the system. The occurrences of these types of failures are stochastic and mutually exclusive.
A2
Whenever the system fails in any of the failure states, it will be repaired. The system will be replaced by an identical one some times later.
A3
Once the system is operating, the shocks from the environment arrive according to a renewal process. Let X ni , i = 1,2, be the intervals between the (i 1) -st and the i -th shock, after
and PYn t = V (b' ) n t , respectively. Thus the sequence
X n , n = 1,2,
forms a GP
'
a > 1 , while the sequence with ratio Yn , n = 1,2, forms a GP with ratio 0 < b' < 1 . In this case, our model reduces to the GP model for the one component two-state system introduced by Lam [1988]. For two working states 1 i1 < i2 k , we have
X 2 | S (t1 ) = i2 st X 2 | S (t1 ) = i1 . Therefore, the working state i1 is better than the working state i2 , in the sense that, the system in state i1 has a stochastically large operating time than 66 IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
37
ISSN 2229-5518
the (n 1) -st repair. Let E ( X 11) = . We assume that X ni , i = 1,2,, are iid sequences for all n A4
A5
Let Yni , i = 1,2, be the sequence of the amount of shock damage produced by the i -th shock, after the (n 1) -st repair. Let E (Y11) = . Then {Yni , i = 1,2,} are iid sequences, for all n . If the system fails, it is closed, so that the random shocks have no effect on the system during the repair time. Let Z n , n = 1,2, be the repair time after the n -th repair and Z n , n = 1,2, constitute a non decreasing geometric process with E (Z1 ) = and ratio b , such that 0 < b 1. N n (t ) is the counting process denoting the number of shocks after the (n 1) -st repair. The distribution of Z n is denoted by Gn () . It is clear that
E (Z n ) = A6
A7
A8
the
Assume that 1 ≤ a1 ≤ a2 ≤ . . . . ≤ ak and 1≥ b1 ≥ b2 ≥ b3 ≥ . . . . ≥ bl > 0.
A10 The working time X n , the repair time Yn and the replacement time Z , (n = 1,2,) are independent random variables.
3. THE POLICY (T , N ) In this section, we introduce and study a bivariate replacement policy (T , N ) for the multistate degenerative system, under which system is replaced at working age T or at the time of N -th failure, whichever occurs first. The problem is to choose an optimal replacement policy (T , N ) such that the long-run average cost per unit time is minimized. The working age T of the system at time t is the cumulative life-time given by
where
t Mn Ln 1
Ln M n t < Ln 1 M n Ln 1 M n t < Ln 1 M n 1
Ln = i =1X i and M n = i =1Yi n
n
Assume that Fn (t ) be the cumulative distribution of Ln = i =1X i and Gn (t ) be n
and
L0 = M 0 = 0 . Following Lam and Zhang (2004), the distribution of the survival time X n in A3 and the distribution of the repair time Yn in A4 are given by (n 1)! j1 j j j P( X n t ) = p1 pk k U (a1 1 ak k t ), j1! jk ! k
ji = n 1
i =1
(6)
where j1 , j2 ,, jk Z and n! j j j j P(Yn t ) = q1 1 ql l V (b1 1 bl l t ), j1! jl ! l
ji = n
i =1
(7) where j1 , j2 ,, jl Z . If E ( X 1 ) = , then the mean survival time is
A9
of
M n = i =1Yi .
T =
If the system in working state i is operating, then let the reward rate be r. If the system in failure state k + i is under repair, the repair cost is c. The replacement cost comprisesof two parts : one part is the basic replacement R and the other is proportional to the replacement time Z at rate cp. In other words, the replacement cost is given by R + cp Z.
distribution
n
. b n 1
Let r be the reward rate per unit time of the system when it is operating and c be the repair cost rate per unit time of the system and the replacement cost is R. The replacement time is a random variable Z with E (Z ) = .
cumulative
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
38
E( X n ) =
a n > 1, for where
n 1
ISSN 2229-5518
,
k p a = i i =1 ai
if the event A occurs, 1 0 if the event A does not occur.
( A) =
(8) 1
(9)
and if E (Y1 ) = , then the mean repair time is
E (Yn ) = n b
From Leung (2005), we have E ( L T < L ) = P( Li T < LN ) i N = P( Li T ) P( LN T )
= Fi (T ) FN (T ).
(10) Lemma 3.1 The mean length of a cycle is
for n > 1 , where 1
l qj b = . j =1 b j
T
0
Further, if Rn = ri where S (sn1 ) = i, i = 1,2,, k denotes the reward earned after the n -th repair, then mean reward earned after (n 1) -st repair is E ( R1 X 1 ) = r and for n 2 then expected reward after installation is given by
r E ( Rn X n ) = n 1 , (12) a k rp where (13) r= i i. i =1 ai and if Cn = ci where S (sn ) = k i, i = 1,2,, l denotes the repair cost after the n -th failure, then mean repair cost after n -th failure is c E (CnYn ) = n1 , (14) b where l cq c= i i. (15) i =1 bi
bi 1
Fi (T ) .
(16)
N 1 N E (W ) = E X i Yi ( L T ) N i =1 i =1
E T Yi ( L >T ) E ( Z ) N i =1 N 1 N = E E X i Yi ( L T ) | LN = u N i =1 i =1 E T ( L >T ) E Yi ( L >T ) E ( Z ) N N i =1
T
T N 1
0
0
= udFN (u ) N 1
T F N (T ) i =1
bi 1
E (Y ) d F i
N
(u )
i =1
E Li T < LN
T
= T F N (T ) u dFN (u) 0
N 1
i =1
The length of a cycle under the bivariate replacement policy (T , N ) is
where = 0,1,2,, N 1 is the number of failures before the working age of the system exceeds T and
i =1
Proof. Consider
3.1 The Length of a cycle and its Mean
N 1 N W = X i Yi L T T Yi L >T Z , N N i =1 i =1 i =1
N 1
E (W ) = F N (u )du
(11)
b
N 1
F (T ) FN (T ) i 1 i i =1
N 1
= F N (u )du T
0
i =1
bi 1
bi 1
FN (T )
Fi (T ) ,
as desired.
■
3.2 Mean Reward and Mean Repair cost Lemma 3.2 If LN T and n 2 , then the expected Reward earned is
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
39
ISSN 2229-5518
N N r E R n X n ( LN T ) = n2 n = 2 n=2 a
T
udF 0
N
N 1 E CnYn ( LN T ) n =1
(u ) .
N 1 = E E CnYn | LN = u ( LN T ) n =1 N 1 T = E CnYn | LN = u dFn (u ) 0 n =1
(17) Proof.
N E R n X n ( LN T ) n =2 = E E R n X n ( LN T ) | LN n =2 T N = E R n X n | LN = u dFN (u ) 0 n=2 N r T = n2 udFN (u ) , 0 n=2 a as desired.
T N 1
=
0
N
n n
N
(u )
n =1 N 1
c F (T ) . n 1 N n =1 b
=
■
Lemma 3.5 If LN > T , then the expected repair cost is ■
Lemma 3.3 If LN > T and n 2 then the expected reward earned is N N r E R n X n ( LN > T ) = n2 Fn (T ) FN (T ) . n = 2 n=2 a (18) Proof. E Rn X n ( LN > T ) n =2
= E Rn X n ( Ln < T < LN ) n =2
1 N 1 c E C nYn ( LN > T ) = n1 Fn (T ) FN (T ) . n =1 n =1 b (20) Proof. 1 E CnYn ( LN > T ) n =1
N 1 = E CnYn ( Ln < T < LN ) n =1 N 1
= E (CnYn ) E ( Ln < T < LN ) n =1 N 1
c Fn (T ) FN (T ) . n 1 n =1 b
=
N
■
4. THE LONG-RUN AVERAGE COST UNDER (T , N ) POLICY
N
= E ( Rn X n ) E ( Ln < T < LN ) n=2
r Fn (T ) FN (T ) . n2 n=2 a
E(C Y )dF
N
=
■
Lemma 3.4 If LN T , then the expected repair cost is N 1 N 1 c E CnYn ( LN T ) = n1 FN (T ) . n=1 n=1 b
(19)
Let T1 be the first replacement time and let Tn (n 2) be the time between (n 1) -st replacement and n -th replacement. Then the sequence Tn , n = 1,2,, forms a renewal process. The interarrival time between two consecutive replacements is a renewal cycle. By the renewal reward theorem (Ross (1996) ), the long-run average cost per unit time under the multistate bivariate replacement policy (T , N ) is
Proof. IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
40
ISSN 2229-5518
C (T , N ) =
the expected cost incurredin a cycle the expected length of a cycle
N N 1 E C Y n n Rn X n ( LN T ) R n =1 n =1 E CnYn T Rn ( LN >T ) c p E ( Z ) n =1 n =1 = . E (W )
Using Lemmas 3.2 to 3.5, we obtain
C (T , N ) =
N N 1 c r T F ( T ) udFN (u ) n 2 0 b n 1 N n =2 a n =1 N 1 c c p R r1 b n 1 Fn (T ) FN (T ) n =1 N r n 2 Fn (T ) FN (T ) rT 1 n =2 a
T
0
N 1
F N (u )du n =1
b n 1
Chen, J. and Li, Z. (2008) An extended extreme shock maintenance model for a deteriorating system, Relia.Engg and Sys Saf., 93, 1123 1129.
[3]
Govindaraju. P, Rizwan. U and Thangaraj, V, (2011) An extreme shock maintenance Model under a Bivariate Replacement Policy, Research Methods in Mathematical Sciences, 1 10.
[4]
Lam, Y. (1988) Geometric Processes and Replacement Problem, Acta. Math. Sinica, 4, 366 377.
[5]
Lam,Y. (1991) An Optimal Repairable Replacement Model for Deteriorating System, J. App. Prob., 28, 843 851.
[6]
Lam, Y. and Zhang, Y.L. (2004) A shock model for the maintenance problem of a repairable system, Computers and Operations Research, 31, 1807 1820.
[7]
Leung, K.N.G., (2005), A Note on a Bivariate Optimal Replacement Policy for a Repairable System, Engineering Optimization, 38, 621 -625.
[8]
Rizwan. U and Mohamad Yunus. M, (2011), (2011) An extreme shock maintenance Model for a Multistate Degenerative System – I, Research Methods in Mathematical Sciences, 49 – 62.
[9]
Ross, S.M. (1996) Stochastic Processes, (2nd ed), John Wiley and Sons, New York.
Fn (T )
Summarizing the above results, we have the following. Theorem 3.1 For the model described in Section 2, under the assumptions A1 to A10, the long-run average cost per unit time under the bivariate replacement policy (T , N ) for a multistate degenerative system is given by N N 1 c r T F ( T ) udFN (u ) n 2 0 b n 1 n n =2 a n =1 N r r1 ( T ) a n 2 Fn (T ) FN (T ) n =2 cp R C (T , N ) = . N 1 T F (T ) n 1 n 0 F N (u)du n =1 b The standard minimization procedure can be adapted to determine the optimal values.
REFERENCES [1]
.
[2]
Barlow, R.E. and Proschan, F. (1975) Statistical Theory of Reliability and life testing, John Wiley, New York.
[10] Stadje, W. and Zuckerman, D.(1990) Optimal strategies for some repair replacement models, Adv. Appl. Prob., 22, 641 656. [11] Thangaraj, V. and Rizwan, U. (2000) Burnin with Optimal Replacement Policies for a system subject to shocks, Proc. of the National Conference on Optimization Techniques in Industrial Mathematics, Ed., Elumalai, S, University of Madras, 207 215.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
41
ISSN 2229-5518
Study of Ionic Conductivity in Li I Grafted Solid Biopolymer Electrolyte A. Ayisha Begam, K. Prem Nazeer and Rugmini Radhakrishnan Abstract - Solid Chitosan Acetate Electrolytic Films were prepared by Grafting the Lithium Iodide salt (0.1 – 0.5 wt %) with Chitosan in the presence of acetic acid. These films were subjected to impedance spectroscopy and ionic conductivity studies. It was found that the ionic conduction behaviour in the electrolyte systems depends on the concentration of the salt used. The highest room temperature conductivity (1.05×10−4 S/cm) obtained from impedance measurement for LiI grafted chitosan electrolyte along with the dielectric and relaxation studies supported the segmental motion of the ion. Study on transference number revealed that the highest conducting samples were ionic conductors. Index Terms - Chitosan acetate solid electrolyte films – Impedance analysis – Dielectric studies – Transference number
—————————— ——————————
1. INTRODUCTION science of polymer electrolytes has THE attracted both in academia and industry, for the past two decades due to the potentially promising applications of such electrolytes, not only in all solid-state rechargeable batteries, but also in other electrochemical devices such as supercapacitors, electrochromic windows, and sensors (Scrosati, 1930), Gray, 1991, 1997). The study of polymer electrolytes was launched by Fenton et al., in 1973, but their technological significance was not appreciated until the research undertaken by Armand et al., (1979) a few years later. These authors claimed that the polymer complexes formed from alkali metal salts were capable of demonstrating significant ionic conductivity, and highlighted their possible application as battery electrolytes. This work inspired intense research and development on the synthesis of new polymer electrolytes, physical studies of their structure and ——————————————
A. Ayisha Begam is serving in the Department of Physics, Avinashilingam University for Women, Coimbatore, India, K. Prem Nazeer is serving in the Department of Physics, Islamiah College, Vaniyambadi, India. E-mail :
[email protected] Rugmini Radhakrishnan served in the Department of Physics, Avinashilingam University for Women, Coimbatore, India
charge transport, theoretical modeling of the chargetransport processes, the physical and chemical properties and their relationship etc. (MacCallum and Vincent (1987, 1989), Song et al.,(1999). This paper deals with ionic conductivity of alkali metal doped solid chitosan acetate electrolyte analyzed with the help of impedance spectroscopy, ac conduction and transference number studies.
2. EXPERIMENTAL Chitosan-salt complexes were formed by grinding 1 g of chitosan powder (Fluka - medium molecular weight) with different concentration (10 – 50 wt %) of LiI salts and by mixing this compound with 50 ml of acetic acid in a 500 ml glass beaker. This solution was stirred for about 1 hour continuously using a Teflon pellet, which was rotated with a help of a magnetic stirrer maintained at room temperature to form 2 % (w/v) solution. Most of the chitosan salt complexes dissolved to give a transparent solution (electrolyte). Minor insoluble solids were removed using a syringe filter with a pore size of 1micron and the required Chitosan electrolyte solutions were collected for the preparation of solid Chitosan electrolyte films. Film casting technique is employed in the present study for the preparation of solid biopolymer electrolyte. The casting of the films was carried
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
42
ISSN 2229-5518
out by pouring the filtered chitosan solution (5ml) onto optically plane glass moulds (10×10 cm) and were allowed to dry at room temperature (25 2 C) in a closed atmosphere for 3 days. The dried films were carefully removed from the mould and its edges were clamped onto a well cleaned optically plane glass plate and finally dried (50C, 24 Hrs) and stored under dry condition. The film thickness was determined using a universal length-measuring instrument (TRIMOS, Switzerland) to an accuracy of 0.110–6m (the pressure maintained in the ball contact was 2.47 Pa). Typical thicknesses of ~ 50µm were used for all the studies. In the present work, an automated Electrochemical Impedance Analyzer (Princeton Applied Research potentiostat - (Model 2273) was used to measure various parameter of the biopolymer electrolyte. DC polarization technique was adapted to measure transference number with the help of home made instruments.
3. RESULTS AND DISCUSSION 3.1 Impedance Spectroscopy of Li I Grafted Chitosan Acetate (CHA) Electrolyte:
Impedance spectroscopy is a powerful method of characterizing many of the electrical properties of electrolyte materials and their interfaces with electronically conducting electrodes. Impedance plot (plot between real and imaginary parts of impedance) for CHA doped with various concentration (10, 30 and 50 wt %) of LiI biopolymer electrolytes at room temperature are shown in Fig.1. In the Nyquist plot (Z’ vs -Z”), one observes a typical spectrum of the ionic conductors consisting of high frequency semicircle and low frequency tail. The observed semicircle in the high frequency region is due to the bulk effect of the electrolytes, and the linear region seen at low frequency range is attributed to the effect of the blocking electrodes. Since the complex impedance will be dominated by the ionic conductance when the phase angle is close to zero, normally, the bulk resistance is directly obtained from the intercept of complex impedance plot with real axis (Z0 axis).
Fig. 1 Impedance plot of CHA electrolyte grafted with Li I at 303 K From Fig.1, some complex impedance curves have not touched the real axis though they are near to the real axis. For these cases, the complex impedance plot is extrapolated to its intersection with the real axis and the conductivity of the electrolyte is calculated. The point where the semi-circle intersects the real axis (Z’) gives the value of bulk resistance (Rb). By knowing the value of bulk resistance (Rb) along with the dimensions of the sample, the conductivity of the sample has been calculated by using the relation σ = d/RbA, where d (≈50μm) is the thickness of the polymer electrolyte films and A (0.5cm2) the surface area of the films. As a general trend, in many studies for the dependence of salt concentration on the ionic conductivity in solid polymer electrolytes at low salt concentrations, the conductivity increases due to build-up of charge carriers. And at high salt concentrations, the conductivity decreases due to build-up of charge carriers offset by the retarding effect of ion cloud (Anji Reddy Polu and Ranveer Kumar, 2011). The impedance spectra of Li grafted CHA showed the retarding effect beyond 50 wt% may be due to preferential site for interaction as suggested in IR studies or due to phase transformation found in the case of UV and XRD studies (Ayisha Begam (2012)) . Therefore, further studies on LiI grafted CHA will certainly through more light on the nature of the required biopolymer electrolyte.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
43
ISSN 2229-5518
3.2 Conductivity Studies on Li I Grafted Chitosan Acetate (CHA) Electrolyte
There are various factors that influence ionic conductivity; the number of charge carriers, ionic mobility as well as the availability of a connecting polar domain as the conduction pathway (Linford, 1993). In this present work, the increase in conductivity could be attributed to the increment of charge carriers, while the decline in conductivity value could simply be explained by the retarding behaviour of ions at higher concentration that arises due to some structural change as reported in IR, UV-Vis and XRD studies (Ayisha Begam, 2012). The behavior of the conductivity–metal salt variation can be explained in terms of weak electrolyte theory. The weak electrolyte theory states that σ = ηqμ, where η is the number density of mobile ions which will be in motion under the action of an electric field; q is the electronic charge and μ is the mobility of ionic species (Idris et al., 2009). From the graph (Fig.2), it can be observed that CHA grafted with LiI (50 wt %) has the highest room temperature conductivity of 1.05 × 10−4 S/cm is more than the basic requirement for electrolyte used for battery applications (Gray et al. (1997)). Similar behaviour was also observed for many polymer electrolytes (Ramya et al., 2005), in which the high ionic conductivity is attributed to increased ionic mobility and increased ionic charge carrier concentration. The temperature-dependent ionic conductivity measurements were taken to analyze the mechanism of ionic conduction in polymer electrolytes. Fig.3 shows the plot of log σac versus 103/T for selected samples in the system. From these plots, the activation energy was calculated using the Arrhenius equation: 𝜎 = 𝜎0 𝑒𝑥𝑝 −𝐸𝑎 𝑘𝑇
where σo is the pre-exponential factor; Ea is the activation energy; T is the absolute temperature and k is the Boltzmann‘s constant. From the conductivity–temperature data which obeys Arrhenius relationship, it can be deduced that the nature of cation transport is quite similar to that occurring in ionic crystals, where ions jump into
Fig. 2 Ionic conductivity and Activation Energy of CHA grafted with various amount of LiI at 303K
Fig. 3 Temperature-dependent ionic conductivity of CHA grafted with LiI electrolyte neighboring vacant sites and hence increase the ionic conductivity (Kulkarni et al., 2010). A linear variation observed from this plot suggests that no phase transition occurred in the polymer matrix or domain formed by addition of LiI. The conductivity values do not show any abrupt jump with temperature, which indicate that, these electrolytes exhibit amorphous nature (Samsudin et al., 2011) as reported in the XRD analysis (Ayisha Begam 2012). Therefore, no dynamic conformational change in the polymer matrix and Li ions might migrate through the conduction path formed by the lattice structure Selvasekarapandian et al., 2005) of the chitosan chains. The increase in conductivity with temperature in solid polymer electrolyte is attributed to segmental motion
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
44
ISSN 2229-5518
which facilitates faster ionic movement (Khiar and Arof, 2011).
towards higher relaxation time.
The activation energy, Ea (combination of the energy of defect formation and the energy for migration of ion) calculated by linear fit from the Fig. 3. The Ea was assumed to be the energy required to move the ion, presupposing that the structure remain unchanged, plus the energy required to deform the structure enough to allow the ion to pass. It is observed from the Fig. 2 that the activation energy decreases gradually with the salt concentration up to 30 wt% and beyond that a fast fall is observed. The decrease in activation energy is due to the density of ions in the polymer electrolyte increase with increasing of LiI concentration; hence, the energy barrier to the ion transport decreases, which would lead to a decrease in the activation energy (Idris et al., 2009). Rice and Roth hypothesized that energy gap exists in the ionic conductor, in which the ion conducting species can be thermally excited from localized ionic states to free ion-like states. Since the ion transfer is greatly affected by the polymer segmental motion (Samsudin et al., 2011), which is very active beyond the concentration of 30 wt%, lowers the value of Ea imply rapid ionic conduction and then increase in mobility of ions also the ionic conductivity.
As discussed earlier, the increase in ionic conductivity is due to the enhancement of the number of carrier ions. On addition of LiI, it is believed that there is an increase in the amorphous content in the materials, which in turn speed up the segmental motion by increasing the available free volume. It is evidenced by the peak shifting towards higher frequency side, thereby reducing the relaxation time. Thus, the relatively fast segmental motion coupled with mobile ions enhances the transport properties of the sample which explains the decrease in relaxation time with concentration as depicted in Fig. 4 (Khiar and Arof, 2011).
3.3 Dielectric Relaxation and Transference Number of LiI Grafted CHA Electrolyte
The strength and frequency of relaxation depend on characteristic property of dipolar relaxation (Pradhan et al., 2008). The study of dielectric loss will throw more information on relaxation process. Fig.4. depicts the frequency dependence of loss tangent for selected samples at ambient temperature. For maximum dielectric loss (tan δmax) at a particular frequency, the absorption peak is described by: τω =1. Here τ is the relaxation time, ω is the angular velocity with ω=2πf, f is the frequency value corresponding to maximum tan δ in Hz. Relaxation time occurs as a result of ionic charge carriers within the sample to obey the change in the direction of the applied field. It is observed from Fig. 5, that the peak frequency shifted towards higher frequency as the salt concentration increases. The shift of the peak
frequency
suggests
quicker
The transference number is defined as the ratio of the conductivity of a species to the final conductivity of the sample (Osman et al., 2001). Since conductivity could be attributed to ions and electrons, the ion transference number was analyzed according to the following equation: 𝑡𝑖𝑜𝑛 + 𝑡𝑒 = 1
where tion and te represent the ionic and electronic transference number. When a voltage V = 2V, is applied to the cell below the decomposition potential of the electrolyte, ionic migration will occur until steady state is achieved. At the steady state, the cell is polarized and any residual current flows because of electron migration across the electrolyte and interfaces. This is because the ionic currents through an ion-blocking electrode fall rapidly with time if the electrolyte is primarily ionic. The plot of polarized current versus time is shown in Fig. 6. The initial total current decreases with time due to the depletion of the ionic species in the electrolyte and becomes constant in the fully depleted situation. The ratio of saturation current to initial current that gives the lithium transference number 0.22. 𝐼 Thus the ionic transference number 𝑡+ = 𝑐𝑎𝑡𝑖𝑜𝑛 𝐼 0
obtained is 0.78 indicating the sample to be an ionic conductor. Reports on lithium transference number ranges from 0.1 to 0.5 (Yahya and Arof, 2002, Khiar and Arof, 2011).
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
45
ISSN 2229-5518
These values show that the polymers grafted /doped with lithium salts are ionic conductors and the main conducting species is the anions. Fig. 6 presents the temporal change in polarization current, which has been normalized for convenience. Comparing the reported results, LiI grafted CHA samples are eligible for ionic battery applications as a suitable biopolymer electrolyte complex. Since the transference measurements were attempted manually, there may be some error (±5%) in the measurement that results in little lower value (0.78) than the theoretical value. Fig. 4. Dependence of tan δ with frequency for selected samples
4.
CONCLUSION
The highest room temperature conductivity (1.05 × 10−4 S/cm) was obtained from impedance measurement. A linear variation in activation energy suggests that there was no phase transition in the polymer matrix and it supported the thermally activated segmental motion of ions. Dielectric and relaxation studies further support the segmental motion coupled with ion enhanced transport property of the samples. Study on transference number revealed that the highest conducting samples were ionic conductors. Further work on the fabrication of biopolymer battery will open a new avenue in the field of green and biodegradable electronics.
Fig. 5 Variation of relaxation time as a function of salt concentration
ACKNOWLEDGEMENTS The authors would like to thank the authorities of Avinashilingam University for Women, Coimbatore and Islamiah College, Vaniyambadi for their support to carry out this work.
REFERENCES [1] Fig. 6 The transference number polarization curve for the highest conducting LiI grafted CHA electrolyte IJSER © 2012 http://www.ijser.org
Ayisha Begam A (2012), ‗Synthesis, Characterization and Application of Chitosan and its Composite Films‘, (Doctoral Thesis), Avinashilingam University for Women, India.
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
46
ISSN 2229-5518
[2]
Anji Reddy Polu and Ranveer Kumar (2011), ‗AC impedance and dielectric spectroscopic studies of Mg2+ ion conducting PVA–PEG blended polymer electrolytes,‘ Bull. Mater. Sci., 34, 5, 1063– 1067.
[3]
Armand, M.B; Chabagno, J.M and Duclot, M (1979), in: Vashista, P; Mundy, J.N and Shenoy, G.K (Eds), ‗Fast Ion Transport in Solids‘, Elsevier, Amsterdam.
[4]
Gray, F.M (1991), ‗Solid Polymer Electrolytes—Fundamentals and Technological Applications‘, VCH, New York.
[5]
Gray, F.M (1997), ‗Polymer Electrolytes‘, RSC Materials Monographs, The Royal Society of Chemistry, Cambridge, London.
[6]
Idris, N.K; Nik Aziz, N.A; Zambri, M.S.M; Zakaria, N.A and Isa, M.I.N (2009), ‗Ionic conductivity studies of chitosan-based polymer electrolytes doped with adipic acid, Ionics, 15, 643-646.
[7]
MacCallum, J.R and Vincent, C.A (1987), ‗Polymer Electrolyte Reviews-1‘, Elsevier, London.
[8]
MacCallum, J.R and Vincent, C.A (1989), ‗Polymer Electrolyte Reviews-2‘, Elsevier, London.
[9]
Scrosati, B (1930), ‗Applications of Electroactive Polymers‘, Chapman and Hall, London.
[10] Song, J.Y; Wang, Y.Y and Wan, C.C (1999), Review of gel type polymer electrolyte for lithum ion batteries, J. Power Sources, 77, 183 -197. [11] Ramya, C.S; Selvasekarapanidan, S; Savitha, T and Hirankumar, G (2005), ‗Transport mechanism of Cu-ion conducting PVA based solid polymer electrolyte‘, Ionics, 11, 5-6, 436-441.
[12] Linford, R.G (1993), ‗Electrical and electrochemical properties of ion conducting polymers in Applications of Electroactive Polymers‘, B. Scrosati (Ed.), Chapman and Hall, London. [13] Khiar, A.S.A and Arof, A.K (2011), ‗Electrical Properties of Starch/ChitosanNH4NO3 Polymer Electrolyte‘, World Academy of Science, Engineering and Technology, 59, 23-27. [14] Kulkarni, A.R; Balaji, R and Srinivasa, R.S, (2010), ‗Structural Investigation of Polyurethane Based Gel Polymer Electrolytes Using Small Angle X-ray Scattering (SAXS)‘ Proc. 3rd Int. Conf. Physics of Solid State Ionics (ICPSSI-3), J. Phys. Soc. Jpn, 79, Suppl. A, 154-159. [15] Pradhan, D.K; Choudhary, R.N.P and Samantaray, B.K (2008), ‗Studies of Dielectric Relaxation and AC Conductivity Behavior of Plasticized Polymer Nanocomposite Electrolytes‘, Int. J. Electrochem. Sci., 3, 597-608. [16] Samsudin, A.S; Kuan, E.C.H and Isa, M.I.N (2011), ‗Methyl Cellulose – Glycolic Acid System: Study on the Potential as Proton Conducting Bio-Polymer Electrolytes‘, Proc. Conf. Empowering Science, Technology and Innovation Towards a Better Tomorrow-UMTAS-2011, 375-379. [17] Selvasekarapandian, S; Hirankumar, G; Kuwata, N; Kawamura, J and Hattori, T (2005), ‗1H Solid State NMR studies on the Proton conducting polymer electrolytes‘, Materials Letters, 59, 22, 2741-2745. [18] Osman, Z; Ibrahim, Z.A and Arof, A.K (2001), ‗Conductivity enhancement due to ion dissociation in plasticised chitosan based polymer electrolytes‘, Carbohydrate Polymer, 44, 167-173. [19] Yahya, M.Z.A and Arof, A.K (2002),‘Studies on lithium acetate doped chitosan conducting polymer system‘, European Polymer Journal, 38, 1191–1197.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
47
ISSN 2229-5518
Neighborhood Critical Edges of an M -strong Guzzy Graph S. Ismail Mohideen and A. Mohamed Ismayil Abstract - A set
S V
is a neighborhood set of G if G =
and is denoted by
N [u ]
u V
number of G is the minimum scalar cardinality taken over all n-set and is denoted by
n set . The neighborhood
n0 . n0 -set is a neighborhood set of G
with minimum scalar cardinality. In this paper, we investigate the properties of critical edges. That is whether the end vertices of critical edges are fixed, free and totally free. Index Terms – Fuzzy Sets, Fuzzy Graph.
—————————— ——————————
1. INTROCUCTION
2. PRELIMINARIES
notion of fuzzy graph and several fuzzy THE analogs of graph theoretical concepts such as path, cycle and connectedness are introduced by Rosenfeld in the year 1975[5]. Mordeson and Peng introduced the concept of fuzzy line graph and developed its basic properties in the year 1993[4]. The neighborhood numbers (n0 ) of various known fuzzy graphs are introduced by S. Ismail Mohideen and A. Mohamed Ismayil in the year 2010[3]. Neighborhood critical vertex in crisp graph is introduced by E. Sambathkumar and Prabha S. Neeralagi in the year 1992[6]. In this paper, Neighborhood critical edges of an M strong fuzzy graph are discussed. Theorems related to these critcal edges are stated and proved. In a fuzzy graph G, the neighborhood number may increase or decrease or remain unaltered, if a vertex or an edge is removed from G. Some results based on neighborhood critical vertices are given in section 3. ———————————
S. Ismail Mohideen is serving in the Department of Mathematics, Jamal Mohamed College, Tiruchirappalli, India. E-mail:
[email protected] A. Mohamed Ismayil is serving in the Department of Mathematics, Jamal Mohamed College, Tiruchirappalli, India. E-mail:
[email protected]
Definition 2.1 Let V be a finite non empty set and E be the collection of two element subsets of V . A fuzzy graph G = ( , ) is a set with two functions : V [0,1] and : E [0,1] such that (u, v) (u) (v) for all u, v V . Definition 2.2 Let G = ( , ) be a fuzzy graph on V and S V . Then the scalar cardinality of S is defined by uS (u ) . The order ( p) and size
(q) of a fuzzy graph G = ( , ) are the scalar cardinality of V and E respectively.
Definition 2.3 A fuzzy graph G1 = ( 1 , 1 ) is called the fuzzy sub graph induced by V1 if for all and 1 (u) (u) u V1 1 (u, v) 1 (u) 1 (v) (u, v) for all u, v V1 and
is
denoted
by
V1 .
A
fuzzy
graph
G1 = ( 1 , 1 ) is called the full fuzzy sub graph induced by V1 if 1 (u) = (u) for all u V1 and 1 (u, v) = 1 (u) 1 (v) (u, v) for all u, v V1
and is denoted by
V1 .
Definition 2.4 A vertex u of a fuzzy graph G = ( , ) is said to be isolated vertex if (u, v) < (u) (v) for all v V \ u . An edge
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
48
ISSN 2229-5518
e = (u, v) of a fuzzy graph is called an effective edge if (u, v) = (u) (v) . Here the vertex u is adjacent to v and the edge e is incident to u and v . A fuzzy graph G = ( , ) is said to be M strong fuzzy graph [1] if (u, v) = (u) (v) for all (u, v) E . Definition 2.5 Let u, v V and e = (u, v) then N (u) = {v V : (u, v) = (u) (v)} is called open neighborhood of u and N[u] = N (u) u is called closed neighborhood of u . Definition 2.6 Let G = ( , ) be a fuzzy graph on V and let u, v V . If (u, v) = (u) (v) then u dominates v (or v is dominated by u ) in G . A subset D of V is called a dominating set in G if for every v V D then there exist u D such that u dominates v .The minimum fuzzy cardinality of a dominating set of G is called the domination number of G and is denoted by (G) or .
Here the parameter is used as a common symbol for neighborhood number n0 and domination number . Definition 3.2 The set of all critical ( critical , critical , fixed , free , totallyfree ) vertices are called c set ( c ,
c , fx , fr , tf set ). Example 3.1 Consider the fuzzy graph given in figure 3.1. 0.5
v1
0.4 0.6
0.5
0.7 0.3
v2
v3
v4
v5
v6
v7
v8
Figure: 3.1 Let the set be v2 , v4 , v6 , v8 .
(i) v1 , v2 , v4 , v6 , v8 is c -set (ii) v2 , v6 is c -set (iii) v1 , v4 , v8 is c -set
(iv) v2 , v6 , v8 is fx -set (v) v3 , v4 is fr -set
(vi) v1 , v5 , v7 is tf -set. Observation 3.1 the vertex v is isolate (G v) < (G) , that is v fx -set.
1. If
In a fuzzy graph G, the beighborhood number may increase or decrcease or remain unaltered if a vertex is removed from G.
then
2. The union of fx -set, fr -set and tf -set is V, that is fx set fr set tf set = p , where p is an order of G .
3. NEIGHBORHOOD CRITICAL VERTICES Definition 3.1 A vertex v of G is (i) critical if (G v) (G)
3. Every vertex of -set is critical. Coverse is not true, for example, In figure 3.1, v1 is critical but not in -set.
(ii) critical if (G v) > (G) (iii) critical if (G v) < (G) (iv) fixed if v belongs to every -set (v) free if v belongs to some -set but not all (vi) totallyfre e if v does not belong any -set.
0.4
. ——— . ——– . ——— . . ——– . ——– . .
Definition 2.7 Let G = ( , ) be an M -strong fuzzy graph. A set S V is a neighborhood set of G if G = uS N[u] and is denoted by n set . The neighborhood number of G is the minimium scalar cardinality taken over all n-set and is denoted by n0 . n0 -set is a neighborhood set of G with minimium scalar cardinality.
0.2
Theorem 3.1 Every critical vertex of G is fixed .
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
49
ISSN 2229-5518
Remark 3.1 Converse of the Theorem given in sec.1.5 need not be true. For example, In figure 3.1, v8 is fixed but not critical . Theorem 3.2 Let G be a fuzzy graph, if -set is unique in G , then every vertex of V is either in fx -set or tf -set. In this case, the union of fx set and tf -set is V. That is
Remark 3.2 If -set is unique, then 1. fr -set is empty. 2. Intersection of fx -set and tf -set is empty. Theorem 3.3 Every vertex of V not in c set is either in fr -set and tf -set. Theorem 3.4 1. A vertex v is critical if and only if N (u) uDv N (u) for some -set D containing v . 2. v is n0 critical if and only if N (v) is a fuzzy subgraph for some n0 -set
of D
containing v .
Proof. If e is critical , then (G e) > (G). Suppose there exists a dominating set of G e (G) . with scalar cardinality Then (G e) = (G) , which is a contradiction. conversely, suppose there is no dominating set of G e with scalar cardinality (G) . Then (G e) (G) and e is critical . Theorem 4.2 An edge e in G is n0 critical ( n0 critical ) if and only if there does not exists an n0 -set of G ( G e ) with scalar cardinality
n0 (G) ( n0 (G e) ). Proof. The proof is on similar lines to that of theorem 4.1 and is omitted. Corrolory 4.1 Let e = (u, v) be critical . Then any -set D of G contains exactly one of the end verex of e .
4. NEIGHBORHOOD CRITICAL EDGES In this section, we intestigate critical edges and investigate whether the end vertices of critical edges are fixed, free and totally free edges. Definition 4.1 An edge e of G is (i) critical if (G e) (G) (ii) critical if (G e) > (G) (iii) critical if (G e) < (G) Observation 4.1 1. If an edge e in G is critical , then (G e) > (G) . Thus a critical edge is always critical .
1.1 is n0 critical . Theorem 4.1 An edge e in G is critical if and only if there is no dominating set of G e with scalar cardinality (G) .
fx set tf set = p .
full induced uDv N (u )
2. An n0 critical edge e is either n0 critical or n0 critical . For example, removal of any one edge of an odd fuzzy cycle of length 5 is n0 critical , but the edge e in the figure
Let D be a -set of G and let e = (u, v) G . If D contains both u and v or none of u and v , then D is a dominating set of G e with scalar cardinality (G) and hence e is not critical which is a contradiction by the theorem 4.1. Proof.
Corrolory 4.2 Let e = (u, v) be n0 critical . Then any n0 -set D of G contains exactly one of the end verex of e . Proof. Let D be a n0 -set of G and let e = (u, v) G . If D contains both u and v or none of u and v , then D is an n0 -set of G e
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
50
ISSN 2229-5518
n0 (G e) = 0 (G e) < 0 (G) = n0 (G) .
with scalar cardinality n0 (G) and hence e is not 0
n critical which is a contradiction by the theorem 4.2.
Observation 4.2 If an edge critical , then either
e = (u, v)
is
1. u and v are fixed or 2. u is fixed and v is totallyfree or 3. both u and v are free .
= 0 (G) i . by obsevation 5.1. 0 (G) i = 0 (G e) r .
(ii) suppose, If e is a component of G , then r > i . Hence 0 (G) > 0 (G e) .
For an 0 critical edge e in a fuzzy graph without isolated vertices, 0 (G e) 0 (G) . Observation 5.1 If G has no fuzzy triagles, then n0 (G) = 0 (G) . If r is the scalar cardinality of (G e) , then the isolated vertices of n0 (G e) = 0 (G e) r Theorem 5.1 Let e be an edge in an M -strong fuzzy graph G without any fuzzy triangle. Then is n0 critical if and only if e 0 critical and e is not a pendent edge.
n0 (G e) = n0 (G) i (for some i)
(i) If r = i , then 0 (G e) = 0 (G) (or)
5. RELATIONSHIP BETWEEN n0 CRITICAL AND 0 CRITICAL EDGES
1. e
Hence e is n0 critical . 2. If e is n0 critical , then
is
2. e is n0 critical if and only if e is a pendent edge and if e does not form a component by itself, then e is not an 0 critical. Proof. 1. If e is n0 critical and G has no fuzzy triagles, then 0 (G e) r = n0 (G e)
Conversely, suppose e is a pendent edge such tha if e does not form a component by itself, then e is not n0 critical . Then either (i) or (ii) holds. If (i) holds, it follows from the obsevation given in sec. 3.1 that n0 (G e) > n0 (G) and if (ii) holds, then trivially e is n0 critical .
REFERENCES [1] K.R. Bhutani and A. Battou, On M-strong fuzzy graphs, Information Sciences 155, pp.103-109 (2003). [2] George J.Klir and Bo Yuan, Fuzzy sets and Fuzzy logic-Theory and Application, Prentice Hall of India, 2005 [3] S. Ismail Mohideen and A. Mohamed Ismayil, The vertex neighborhood number of a fuzzy graph, Int. Jour. Mathematics Research, vol.2, Number 3, pp. 71-76(2010). [4] J.N. Mordeson, C.S. Peng, Operations on fuzzy graphs, Information Sciences 79, 159170 (1994).
< n0 (G ) = 0 (G ) < 0 (G e) Therefore, if r = 0 , then e is not a pendent edge and if r 0 , then e is 0 critical . Conversely, if e is 0 critical and e is not pendent edge, then 0 (G e) < 0 (G) and r = 0 then by obsevation 5.1,
[5] A. Rosenfeld, Fuzzy graphs, in: L.A. Zedeh, K.S. Fu, K. Tanaka, M. Shimura (Eds.), Fuzzy sets and Their Applications to Cognitive and Decision Processes, Academic Press, NewYork, 1975, pp 77-95. [6] Sampathkumar, E and Prabha S. Neeralagi, Domination and neighborhood critical, fixed,
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
51
ISSN 2229-5518
free and totally free points, Indian J. of Statistics, Special Vol.54,pp. 403-407(1992) [7] Zimmermann,H.J, Fuzzy Set Theory and its Application, Springer International Edition, Fourth Edition(2001).
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
52
ISSN 2229-5518
On Pricing an Exotic Option in a Jump-Diffusion with a Switching Type Volatility M. Reni Sagaya Raj, P. Manoharan and A. George Maria Selvam Abstract - In Jump Diffusion models, the frequency of jumps is finite. They are the prototypes for a large class of more complex models such as the stochastic volatility with jumps. In this paper, we consider the time horizon
K
T
(strike time) of a call option and
(strike price) of the asset. The call option which is called a cliquet option, have its terminal claim given by
C (TC , T ) = max ( ST K ),( ST where the date
TC
C K
),0
is called cliquet date. The results obtained can be applied to other areas like Number Theory, Stochastic
Processes and Probabilistic Models. Index Terms – Jump diffusion, exotic option.
—————————— ——————————
1. INTRODUCTION
2. FINANCIAL MARKET MODEL
the standard vanilla options, exotic BESIDES options such as barrier options, look back options, floating-strike options and cliquet options have become very popular financial trading instruments. Unlike the vanilla options, the pay off functions of the exotic options are pathdependent and hence the problem of obtaining closed form solutions for each options are very much complicated. Several studies have been made in the last few decades in obtaining pricing formulas for the exotic options. However, not much work has been done for pricing exotic options in stochastic volatility models. Accordingly, we present the problem of pricing a cliquet option when the underlying asset price satisfies a jump-diffusion equation and the volatility changes according to the occurrence of the jumps in the asset price.
Let T be a positive constant representing the time horizon and let the market consist of a risk-free asset (bond) and a risky asset (stock). At time t , let the price of the bond be Bt and that of the stock be S t . We assume that B0 = 1 and S0 = A . Let Bt satisfy the equation
dBt = rBt (1) where r is a positive constant representing the risk-free interest rate of the bond price. Then Bt = e rt . We assume that the price S t of the risky asset satisfies the stochastic jump-diffusion differential equation dSt dt 1dWt dNt , 0 t Tc , = t c , St dt 2 dWt dNt ,
(2)
where we have assumed
——————————————
M. Reni Sagayaraj is serving in the Department of Mathematics, Sacred HeartCollege, Tirupattur, India. E-mail:
[email protected] P. Maoharan is serving in the Department of Mathematics, Sacred HeartCollege, Tirupattur, India. A. George Maria Selvam is serving in the Department of Mathematics, Sacred HeartCollege, Tirupattur, India. IJSER © 2012 http://www.ijser.org
, 1 , 2 and are positive constants;
Wt is a standard Brownian motion on a probability space (W , F W , PW ) ; Nt is a Poisson process on a probability space ( N , F N , P N ) ; Tc W is random variable independent of t N W N and t ; t and t are independent of each other.
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
53
ISSN 2229-5518
Let the Poisson process N t be of constant intensity and the probability density function of Tc be f (u ) . Let F W t 0t T be the natural
filtration generated by Wt and F N t
0t T
be that
generated by N t . Let (, F , P) be the product and (W , F W , PW ) t N N N ( , F , P ) . Let F 0t T be the filtration
space
formed
by
generated by the direct product of F W t
F t N
0t T
0t T
and
. Then the asset process St 0t T is
defined on (, F , P) . The equation (1) can be written as
dSt = dt t dWt dN t ,0 t < T , St
although Wt and M t are P martingale in the ~ above equation (5), the process S t is not a P martingale. We now seek a probability measure ~ Q such that S t is a Q martingale. First, for each pair of constants and with 0 , we define a process Lt defined by
1 Lt = exp (1 ) 2 t Wt log N t (6) 2 Then, we have 1 2 (1 ) t 2
E ( P ) [ Lt ] = e
1 2 t
e 2 E[(log ) N t ]
(3)
e (1 ) t e n log e t n =0
where t = 1I 0t T 2 I t T with I A denoting c c the indicator function of the set A defined by
e (1 ) t e t n =0
e 1
1 if x A I A ( x) = otherwise 0
3. AN EQUIVALENT MARTINGALE MEASURE AND THE STICK PRICE We now proceed to solve the equation (3) for the asset price S t and obtain an equivalent martingale measure Q under which the discounted asset price becomes a martingale. For this, we let M t = Nt t Then the equation (3) becomes
( t ) n n!
( t ) n n!
(1 ) t (1 ) t
e
For each A Ft , we define a set function Q such that Q( A) = Lt dP( ) A
Then Q is a probability measure equivalent to P dQ = Lt such that the Radon-Nikodym derivative dP We define Wt (Q) = Wt t , M t(Q) = Nt t.
dSt = ( )dt t dWt dM t ,0 t < T , St
(4)
Then, with respect to the measure Q , we note that
E (Q ) [Wt ( Q ) ]
Define the discounted price of the asset
E (Q ) [Wt t ]
~ S St = t = e rt St Bt
E ( P ) [{Wt t}Lt ]
Then the equation (4) becomes ~ dSt ~ = ( r )dt t dWt dM t ,0 t < T , (5) St IJSER © 2012 http://www.ijser.org
1 E ( P ) [(Wt t ) exp[{ (1 ) 2 }t 2 Wt (log ) N t ]] E ( P ) [(Wt t )e
1 2t W 2
e ]
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
54
ISSN 2229-5518
E (Q ) [Wt (Q ) ] = 0.
(7)
Similarly, we note that E (Q ) [ M t(Q ) ] E
(Q )
We obtain the equation (12) that dS dX t = log 1 t St
[ N t t ]
=
E [( N t t ) Lt ] (P)
1 E ( P ) [( N t t ) exp[{ (1 ) 2 }t 2 Wt (log ) N t ]]
=
E ( P ) [( N t t )e (1 ) t t ] N
E (Q ) [M t(Q) ] = t t = 0
(8)
Further the process Wt Q is a standard Brownian Motion with respect to the measure Q . The equations (5) becomes
( r )dt t d{Wt (Q ) t} dS = St d{M t(Q ) t t} =
( r t )dt t dWt
(9)
(Q )
1 dX t = t2 dt t dWt (Q ) log (1 )dN t 2 (13)
When 0 t Tc , we have from the equation (13),
1 X t = X 0 12 t 1Wt (Q ) log (1 )N t 2 That is, we have 1 log St = log S0 12 t 2 (Q ) 1Wt log(1 ) Nt
dM t(Q )
We eliminate the presence of in (9) by choosing and such that r t = 0
(10)
Then from the equation (10), we obtain r ( ) =
(11)
t
Then the equation (9) yields ~ dSt (Q ) (Q ) ~ = t dWt dM t St
dw
(12)
= o( dt ),
dw (Q ) t
2
Similarly, when Tc t T , we have from the equation (13), 1 log St = log ST 22 (t TC ) c 2
(Q ) t
= dt , n
= dNt ,
2 Wt (Q ) WT(Q ) C
(15)
Using (14) and (15), we can solve the problem of pricing a cliquet option.
REFERENCES [1] Chesney, M. and Jeanblanc, M. (2004): Pricing American currency options in an exponential Levy model, Applied Mathematical Finance, 11, 207 - 225.
dM t(Q ) = dNt dt ,
dM
(14)
log(1 ) ( Nt NTC )
The equation (12) clearly establishes the fact that ~ S t is a Q martingale. We solve the equation ~ (12) by putting X t = log St and noting the fact that (Q ) t
2 3 dSt 1 dSt 1 dSt ... St 2 St 3 St 1 t dWt (Q ) dM t(Q ) t2 dt 2 1 3 1 dN t 4 dN t ... 3 4
n = 2,3,... IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
55
ISSN 2229-5518
[2] Cont, R., and Tankov, P.(2004): Financial modeling with jump processes, Chapman and Hall, CRC. [3] Cox, J.C., and Ross, S.A. (1976): Them valuation of options for alternative stochastic processes, Journal of Financial Economics, 3, 145 - 166. [4] Devydov, D. and Linetsky, V.(2001): Pricing and hedging path - dependent options under the CEV process, Management Science, 47, 949 - 965. [5] Duffle, D.(2000): Dynamic Asset Pricing Theory, 3rd Edition, Princeton University Press. [6]
Etheridge, A. (2002): A course in Financial Calculus, Cambridge University Press.
[7]
Geman, H. and Yor, M. (1996): Pricing and Hedging double - barrier options: A probabilistic approach, Math. Fin., 6, 365 378.
[13] Kou, S.G. (2002): A Jump - Diffusion Model for Option Pricing, Management Science, 48, 1086 - 1101. [14] Mercurio, F., and Runggaldier, W.J. (1993): Option pricing for jump - diffusions: approximations and their interpretation, Mathematical Finance, 3, 191 - 200. [15] Myneni, R. (1992): The pricing of American Option, Ann. Appl. Probob., 2, 1 - 23. [16] Schoutens, W. (2006): Exotic options under Levy models: An overview, Journal of Computational and Applied Mathematics, 189, 526 - 538. [17] Sharpe, W.F. (1964): Capital Asset Prices: A theory of market equilibrium under conditions of risk, J. Financial Studies, 4, 425 - 442. [18] Smith, C.W. JR. (1976): Option Pricing: A Review, J. Financial Studies, 3, 3 - 51.
[8]
Gukhal, C.R. (2001): Analytical valuation of American options on jump - diffusion processes, Mathematical Finance, 11, 97 115.
[19] Stein, E.M., and Stein, C.J. (1991): Stock price distributions with stochastic volatility: an analytic approach, Rev. Financial Studies, 4, 727 - 752.
[9]
Haifeng, Y., Jianqi, Y. and L. Limin (2005): Pricing cliquet Options in Jump - Diffusion Models, Stochastic Models, 21, 875 - 884.
[20] Wiggins, J.B. (1987): Options values under stochastic volatility: Theory and empirical estimates, J. Financial Economics, 19, 351 372.
[10] Heston, S.L.(1992): A closed form solution for options with stochastic volatility with applications to bond and curency options, Rev. Financial Studies, 6, 333 - 343. [11] Kallianpur, G. and R.L. Karandikar (2000): Introduction to Option Pricing Theory Birkhauser. [12] Karatzas, I. (1998): On Pricing of American Options, Appl. Math. Optim., 17, 37 - 60.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
56
ISSN 2229-5518
Some Properties of a Cumulative Damage Threshold Crossing Model with Underlying Birth Process U. Rizwan and S. Kasthuri Abstract - In this paper, we describe the cumulative damage random threshold crossing model with underlying birth process and give the reliability of the system under this model. We present some stochastic properties of the survival function for this model. It is shown that some partial orderings, namely the stochastic ordering and the failure rate ordering are preserved among the two systems under consideration. Finally, some open problems related to the presentation of other ageing properties, for our model are given. Index Terms – IFR, NBU, PF2, Stochastic Ordering, Failure Rate Ordering, Pure Birth Process.
—————————— ——————————
1. INTRODUCTION a system subject to shocks CONSIDER occurring randomly in time. Each shock deteriorates the system and the damage accumulates. The system fails when the total accumulated damage exceeds a certain threshold 𝑎. Suppose 𝜉𝑖 (≥ 0) is the amount of damage caused by the ith shock and 𝑁(𝑡) ; 𝑡 ≥ 0 is the number of shocks the system is subject to in the time interval 0, 𝑡 . Here 𝜉𝑖 and 𝑁 are independent. Then the probability 𝐻 (𝑡) that the system will survive beyond time t is 𝐻 (𝑡) =
∞ 𝑘=0 𝑃(𝑁(𝑡)
= 𝑘)𝑃(𝑘) ,
𝑡 ≥ 0, (1.1)
where 𝑃 (𝑘) = 𝑃(𝜉1 + 𝜉2 + ⋯ + 𝜉𝑘 ≤ 𝑎). Shock models of this kind have been studied by a number of authors, in which the number of shocks are governed by a Poisson process. But the magnitudes of the damages were not assumed to grow along with time. Ebrahimi [1999] has assumed that the magnitudes of the shocks vary with time. ——————————————
U. Rizwan is serving in the Department of Mathematics, Islamiah College, Vaniyambadi, India. E-mail:
[email protected] S. Kasthuri is pursuing Ph.D. degree in Mathematics, Islamiah College, Vaniyambadi, India and is serving in the Department of Mathematics, Auxillium College, Vellore, India. E-mail:
[email protected]
In this paper, we study the cumulative damage random threshold crossing model in which shocks occur according to a nonstationary pure birth process of the following sort : (A-Hameed [1975]) shocks occur according to a Markov process; given that k shocks have occurred in 0, 𝑡 , the probability of a shock occurring in (𝑡, 𝑡 + ∆] is 𝜆𝑘 𝜆(𝑡)∆ + 𝜊(∆), while the probability of more than one shock occurring in (𝑡, 𝑡 + ∆] is 𝜊 ∆ . Further the damages vary with time which is different from the existing models. This is referred to as Pure Birth Shock Model.
Remark 1. In the stationary pure birth process, given that 𝑘 shocks have occurred in 0, 𝛬 𝑡 , the probability of a shock occurring in 𝛬 𝑡 , 𝛬 𝑡 + 𝜆(𝑡)∆ is of the same form : 𝜆𝑘𝜆(𝑡)∆+𝜊(∆), 𝑡 where 𝛬 𝑡 = 0 𝜆 𝑥 𝑑𝑥. It follows that the Pure Birth Shock Model may be obtained from the stationary pure birth process by the transformation 𝑡→𝛬 𝑡 . For this shock model, the survival function 𝐻 (𝑡) in (1.1) can be written as 𝐻 (𝑡) = 𝑆(𝛬 𝑡 ) and 𝑆(𝑡) =
∞ 𝑘=0 𝑧𝑘
𝑡 𝑃(𝑘),
where 𝑧𝑘 𝑡 = 𝑃(exactly 𝑘 shocks have occurred in (0, 𝑡] where 𝜆(𝑡) = 1).
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
57
ISSN 2229-5518
This means that 𝑆(∙) is the survival function when the shocks occur according to a stationary birth process for which the interarrival times between the shocks number 𝑘 and 𝑘 + 1, 𝑘 = 0, 1,2, . . ., are independent and exponentially distributed with mean 1/𝜆𝑘 and ∞ 𝑘=0 1/𝜆𝑘 = ∞.
functions 𝐹(∙) and 𝐺(∙). Then 𝑋 is said to be larger than 𝑌 in failure rate order, denoted by 𝑋≥𝐹𝑅 𝑌 , 𝑖𝑓 𝐹 (𝑡)/𝐺 (𝑡) is non-decreasing in 𝑡 ≥ 0, or equivalently, 𝑟𝐹 𝑡 ≤ 𝑟𝐺 𝑡 , for all 𝑡 ≥ 0, where 𝑟𝐹 ∙ 𝑎𝑛𝑑 𝑟𝐺 ∙ denote the failure rates of 𝐹(∙) and 𝐺(∙).
In this paper, we consider a model, which is a more general shock model than that of Esary et al [1973] and Ebrahimi [1999].
Definition 2.4. A life distribution 𝐹(∙) and its survival function 𝐹 = 1 − 𝐹 with support ∞ 𝑆 = 𝑡 ∶ 𝐹 > 0 and finite mean 𝜇 = 0 𝐹 𝑥 𝑑𝑥 are said to be
The rest of the paper is organized as follows : In Section 2, we first give the concepts that are needed in the ensuing Sections. We also describe the model and give the reliability of the system under this model in this Section. Some stochastic properties of the survival function are given in Section 3. It is shown in Section 4, that some partial orderings, namely the stochastic ordering and the failure rate ordering are preserved among the two systems under consideration. Finally, in Section 5, we raise some questions regarding the preservation of other ageing properties, for our model.
(i)
conditional survival function
(ii)
(iii)
𝑙𝑛 𝐹 𝑡 𝑡
is increasing in S.
new better than used (NBU), if
for all 𝑥 ≥ 0 and 𝑦 ≥ 0.
Definition 2.1. The failure rate 𝑟(∙) of a random variable 𝑇 with distribution function 𝐹(∙) is defined by 1 𝑟 𝑡 = 𝑙𝑖𝑚∆0 ∆ 𝑃 𝑡 < 𝑇 ≤ 𝑡 + ∆∣ 𝑇 > 𝑡 ,
is
𝐹 𝑥+𝑦 ≤𝐹 𝑥 𝐹 𝑦 ,
(iv)
𝑡
𝐹 𝑡
increasing failure rate average (IFRA), if −
In this Section, we first give some definitions and describe the model.
𝑓 𝑡
𝐹 𝑥+𝑡
decreasing in t, whenever 𝑥 > 0 and 𝑡 ∊ 𝑆.
2. PRELIMINARIES
=𝐹
increasing failure rate (IFR), if the
𝐹 𝑥
provided the probability density function 𝑓(∙) exists, where 𝐹 𝑡 < 1, for all 𝑡 ≥ 0. Definition 2.2. Let 𝑋 and 𝑌 be two non-negative random variables with corresponding distribution functions 𝐹(∙) and 𝐺(∙). Then 𝑋 is said to be stochastic larger than 𝑌, denoted by 𝑋≥𝑠𝑡 𝑌 , 𝑖𝑓 𝐹 𝑡 ≤ 𝐺 𝑡 , 𝑓𝑜𝑟 𝑎𝑙𝑙 𝑡 ≥ 0. Definition 2.3. Let 𝑋 and 𝑌 be two non-negative random variables with corresponding distribution IJSER © 2012 http://www.ijser.org
∞ 𝐹 𝑥 + 𝑦 𝑑𝑦 0 ∞ 𝐹 𝑦 𝑑𝑦, 0
≤
for all 𝑥 ≥ 0. (v)
𝑡≥0 ,
new better than used in expectation (NBUE), if
decreasing mean residual life (DMRL), if ∞ 1 𝐹 𝑥 𝑑𝑥 𝐹 𝑡 0 is decreasing on S.
(vi)
harmonic new better than used in expectation (HNBUE), if ∞ 𝐹 𝑡
𝑡
𝑥 𝑑𝑥 ≤ 𝜇 𝑒𝑥𝑝 − 𝜇 ,
𝑡 ≥ 0.
for
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
58
ISSN 2229-5518
Definition 2.5. A function 𝑓(∙) is super additive, if 𝑓 𝑡 + 𝑢 ≥ 𝑓 𝑡 + 𝑓 𝑢 , for 𝑡 ≥ 0, 𝑢 ≥ 0. Definition 2.6. A function 𝑓(𝑥) defined for x in −∞, ∞ is a P𝑜lya frequency function of order 2 𝑃𝐹2 if 𝑓 𝑥 ≥ 0 for all x and 𝑓 𝑥1 − 𝑦1 𝑓 𝑥2 − 𝑦1 whenever 𝑥2 < ∞.
𝑓 𝑥1 − 𝑦2 𝑓 𝑥2 − 𝑦2
≥0,
Suppose that shocks occur randomly in time in accordance with a pure birth shock process 𝑁(𝑡) ; 𝑡 ≥ 0 as described in Section 1 here 𝑁(𝑡) denotes the number of shocks that have occurred upto time t. Suppose 𝑇𝑖 , 𝑖 = 1, 2, . . . are the shock arrival times and 𝑋𝑖 𝑡 − 𝑇𝑖 , 𝑡 ≥ 𝑇𝑖 , is the evolution of the damage to the system from the ith shock. Then 𝑁 𝑡 𝑖=1
𝑋𝑖 𝑡 − 𝑇𝑖 , 𝑡 ≥ 0
(2.1)
is the total damage process. It is assumed here that the processes 𝑋1 𝑡 , 𝑋2 𝑡 , . . . are independent and all of them have non-decreasing sample paths, that is, 𝑋𝑖 𝑡 = 𝑋𝑖 (0, 𝑡] , 𝑡 ≥ 0. The above model is referred to as explosive Poisson shot noise process. For more details of this process one may refer to Kl𝑢ppelberg and Mikosch[1995]. This model may be used in risk analysis, where 𝑁 𝑡 is the number claims in [0, 𝑡], 𝑋𝑖 𝑡 is the ith claim and 𝑆 𝑡 is the total claim up to time 𝑡. Suppose that the system fails when 𝑆 𝑡 , in (2.1), exceeds a known threshold 𝑎. Then the time to system failure, 𝑇 𝑎 , can be written as 𝑇 𝑎 𝑖𝑛𝑓 𝑡 ∶ 𝑆 𝑡 > 𝑎 𝑖𝑓 𝑡 ∶ 𝑆 𝑡 > 𝑎 ≠ ∅ = ∞ 𝑖𝑓 𝑡 ∶ 𝑆 𝑡 > 𝑎 = ∅ and the reliability, 𝐹𝑎 𝑡 , of the system is 𝐹𝑎 𝑡 = 𝑃 𝑇 𝑡 > 𝑡
Remark 2. When there is no possibility to determine the threshold 𝑎, then the failure time of the system is 𝑇 = 𝑖𝑛𝑓 𝑡 ∶ 𝑆 𝑡 > 𝑉 , where 𝑉 is a positive random threshold with known probability density function 𝑔𝑉 ∙ and the survival function ∞ 𝐹 0 𝑣
−∞ < 𝑥1 < 𝑥2 < ∞ and −∞ < 𝑥1
0 in a pure birth process with rates 𝜆𝑘 . Then the conditional joint density function of 𝑇1 , . . . , 𝑇𝑘+𝑗 , the successive times of occurrence, given that 𝑁(𝑡) = 𝑘 and 𝑁(𝑡 + 𝑥) = 𝑘 + 𝑗 is given by
p 303,
𝑧𝑘′ 𝑡 = −𝜆𝑘 𝑧𝑘 𝑡 + 𝜆𝑘−1 𝑧𝑘−1 𝑡 , (𝑘 ≥ 1), and
𝑧0′ 𝑡 = −𝜆0 𝑧0 𝑡 .
Also, let 𝐹1𝑎 𝑡 =
∞ 𝑘=0 𝑧𝑘
𝑡 𝑃 𝑡 .
Then by Remark 1, we may write 𝐹𝑎 𝑡 = 𝐹1𝑎 𝛬 𝑡 . For 𝑥, 𝑡 ≥ 0, using Theorem 2.1, we may write
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
60
ISSN 2229-5518
∞
𝑗
𝑘
∞
𝐹1𝑎 𝑡 + 𝑥 =
𝐴𝑘𝑣
𝑧𝑘 𝑡 𝑧𝑘 𝑥 𝑘=0 𝑗 =0
𝑣=0 𝑡
𝑣=0
𝑡
𝑡
×
𝑡+𝑥
𝑡 − 𝑡𝑖 , 𝑡 + 𝑥 − 𝑡𝑖
Then (3.1) becomes 𝐹1𝑎 𝑡 + 𝑥 = 𝑒𝑥𝑝 −𝜆0 𝑡 + 𝑥 𝑡 𝑢1
×
𝑢 𝑘−1
… 0 0
∞ 𝑗 =0 𝜆1
0
0 𝑘
𝑘+𝑗
𝑘
𝑒𝑥𝑝
𝜆𝑖−1 − 𝜆𝑖
𝑢𝑖 + 𝑥
× 𝑒𝑥𝑝
𝑖=1 𝑘+𝑗
0
×𝑃
𝑖=1
𝑘+𝑗 −1
… 𝜆𝑘 𝜆𝑘+1 … 𝜆𝑘+𝑗
𝑢 𝑘 +𝑗 −1
𝑢 𝑘 +1
𝑋𝑖 𝑡 + 𝑥 − 𝑡𝑖 ≤ 𝑎
3.1
…
0
𝑡 𝑘 +1
𝑃
𝑖 = 1,2, … , 𝑘 𝑖 = 𝑘 + 1, … , 𝑘 + 𝑗
∞ 𝑘=0
𝑥
𝑘+𝑗
𝑡+𝑥
… 𝑡 𝑘−1 𝑡
× 𝑑𝑡𝑘+𝑗 … 𝑑𝑡𝑘+1 𝑑𝑡𝑘 … 𝑑𝑡1
𝑢𝑖 =
𝑡+𝑥
… 0 𝑡1
Let
𝐴𝑗 𝑣 𝑒𝑥𝑝 −𝜆𝑣 𝑥
𝑒𝑥𝑝 −𝜆𝑣 𝑡
𝑋𝑖 𝑢𝑖 + 𝑥 + 𝑖=1
𝜆𝑖−1 − 𝜆𝑖 𝑢𝑖 𝑖=𝑘+1
𝑋𝑖 𝑢𝑖 ≤ 𝑎
× 𝑑𝑢𝑘+𝑗 … 𝑑𝑢1
𝑖=𝑘+1 ∞
∞
≤ 𝑒𝑥𝑝 −𝜆0 𝑡 𝑒𝑥𝑝 −𝜆0 𝑥
𝜆1 … 𝜆𝑘 𝜆𝑘+1 … 𝜆𝑘+𝑗 𝑘=0 𝑗 =0
𝑡 𝑢1
×
𝑢 𝑘−1
…
𝑥
…
0
0 0
𝑢 𝑘+𝑗 −1
𝑢 𝑘+1
0
𝑘
𝑒𝑥𝑝
0 𝑘+𝑗
×𝑃
𝑘+𝑗
𝜆𝑖−1 − 𝜆𝑖 𝑢𝑖 × 𝑃 𝑖=𝑘+1
0
𝑋𝑖 𝑢𝑖 + 𝑥 ≤ 𝑎 𝑖=1
𝑋𝑖 𝑢𝑖 ≤ 𝑎 𝑑𝑢𝑘+𝑗 … 𝑑𝑢1 𝑖=𝑘+1
(since 𝑃 𝑘 is NBU) ∞
∞
≤ 𝑒𝑥𝑝 −𝜆0 𝑡 𝑒𝑥𝑝 −𝜆0 𝑥 𝑡 𝑢1
×
… 0 0
𝜆1 … 𝜆𝑘 𝜆𝑘+1 … 𝜆𝑘+𝑗
𝑘=0 𝑗 =0 𝑢 𝑘+1 𝑢 𝑘−1 𝑥 0
0
0 𝑘
×𝑃
𝑢 𝑘 +𝑗 −1
…
𝑘+𝑗
𝑒𝑥𝑝
𝜆𝑖−1 − 𝜆𝑖 𝑢𝑖 𝑖=𝑘+1 𝑘+𝑗
0
𝑋𝑖 𝑢𝑖 ≤ 𝑎 𝑃 𝑖=1
𝑋𝑖 𝑢𝑖 ≤ 𝑎 𝑑𝑢𝑘+𝑗 … 𝑑𝑢1 𝑖=𝑘+1
= 𝐹1𝑎 𝑡 𝐹1𝑎 𝑥 , IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
61
ISSN 2229-5518
since {𝑋𝑛 (𝑡) ; 𝑛 = 1, 2, . . . } is a non-decreasing process. Since 𝛬(𝑡) is super additive and 𝐹1𝑎 𝑡 is increasing, it follows that 𝐹𝑎 𝑡 is NBU. ■ Remark 4. When {𝑋𝑛 (𝑡) ; 𝑛 = 1, 2, . . . } is a non-identical process, then the last inequality in the proof of Theorem 3.1 be comes less than, and in this case, the shocks become increasingly effective in causing damage.
= 𝑒𝑥𝑝 −𝜆0 𝑡
1
∞
𝑡
+
𝜆1 … 𝜆𝑘 𝑘=1
𝑢1
0
𝑢𝑘
…
0
𝑘
𝐸 𝐺
𝑋𝑖 𝑢𝑖 𝑖=1
0
𝑘
× 𝑒𝑥𝑝
𝜆𝑗 −1 − 𝜆𝑗 𝑢𝑗 𝑑𝑢𝑘 … 𝑑𝑢1 𝑗 =1
Remark 5. Assume that shocks occur randomly in time in accordance with a pure birth process. Further, the threshold is a positive random variable 𝑉 with cumulative distribution function 𝐺 ∙ and assume that the process {𝑋𝑛 (𝑡) ; 𝑛 = 1, 2, . . . } is independent of the threshold 𝑉. The survival probability 𝐹 𝑡 for the period [0, 𝑡] is now given by
Theorem 3.2. Suppose 𝜆𝑘 ↑, 𝛬 𝑡 is super additive and 𝐺 𝑣 be NBU. Then 𝐹𝑎 𝑡 is NBU. Let 𝑧𝑘 𝑡 be defined as in Theorem 3.1
Proof. and let
∞
𝐹1 𝑡 =
𝑧𝑘 𝑡 𝑃 𝑘 𝑘=0
𝐹 𝑡
Then by Remark 1, we may write
∞
= 𝑒𝑥𝑝 −𝜆0 𝑡 ∞ 𝑡
𝑢1
×
1+
0
0 0
𝐹𝑎 𝑡 = 𝐹1 𝛬 𝑡 .
𝑘=1 𝑘
𝑢𝑘
…
𝜆1 … 𝜆𝑘
𝑃
𝑋𝑖 𝑢𝑖 < 𝑣 𝑖=1
0
𝐹1 𝑡 + 𝑥
𝑘
× 𝑒𝑥𝑝
Consider
𝜆𝑗 −1 – 𝜆𝑗 𝑢𝑗 𝑑𝑢𝑘 … 𝑑𝑢1 𝑑𝐺 𝑣
= 𝑒𝑥𝑝 −𝜆0 𝑡 + 𝑥
𝑗 =1
∞
∞
× ∞
= 𝑒𝑥𝑝 −𝜆0 𝑡 𝑡
𝑢1
× 0
0
1+
𝑒𝑥𝑝
𝐺 𝑣
𝜆𝑗 −1 𝑑 𝑃 𝑑𝑣
𝑢 𝑘−1
…
0
0 0
+𝑥 + 𝑘
… 0
0
𝑘
𝐸 𝐺 0
𝑋𝑖 𝑢𝑖 𝑖=𝑘+1 𝑘
𝑋𝑖 𝑢𝑖 𝑖=1
𝑘=0 𝑗 =0 𝑢 𝑘+𝑗 −1 𝑢 𝑘+1 𝑥
𝑘+𝑗
𝑗 =1
0
0
×
𝑘
∞
− 𝜆𝑗 𝑢𝑗
𝜆1 … 𝜆𝑘 𝑘=1
𝑢𝑘
…
𝑡 𝑢1
𝜆1 … 𝜆𝑘 𝜆𝑘+1 … 𝜆𝑘+𝑗
× 𝑒𝑥𝑝
𝜆𝑖−1 − 𝜆𝑖
𝑢𝑖 + 𝑥
𝑖=1
< 𝑣 𝑑𝑣 𝑑𝑢𝑘 … 𝑑𝑢1
𝑘+𝑗
+
𝜆𝑖−1 − 𝜆𝑖 𝑢𝑖 𝑖=𝑘+1
IJSER © 2012 http://www.ijser.org
× 𝑑𝑢𝑘+𝑗 … 𝑑𝑢1
𝑋𝑖 𝑢𝑖 𝑖=1
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
62
ISSN 2229-5518
∞
≤ 𝑒𝑥𝑝 −𝜆0 𝑡 𝑒𝑥𝑝 −𝜆0 𝑥 𝑡 𝑢1
×
𝑢 𝑘−1
…
0
0 0
𝑥
𝑢 𝑘+1
𝜆1 … 𝜆𝑘 𝜆𝑘+1 … 𝜆𝑘+𝑗 𝑘=0 𝑗 =0 𝑢 𝑘+𝑗 −1
… 0
(b) for 𝑡1 ≤ 𝑡2 , 𝐺𝑡1 𝑢 /𝐺𝑡2 𝑢 is non-increasing in 𝑢 ;
∞
(c) for any 𝑘 ≥ 0 and 𝑡1 < 𝑡2 ,
𝑘+𝑗
𝑒𝑥𝑝
0
0
𝑘
𝜆𝑖−1
𝑃
𝑖=𝑘+1
𝑋𝑖 𝑢𝑖
𝑖=1
(d) for 𝑡1 ≤ 𝑡2 , 𝑘1 ≤ 𝑘2 ,
𝑘+𝑗
𝑋𝑖 𝑢𝑖
𝑘2 𝑖=1 𝑌𝑖 𝑘1 𝑖=1 𝑌𝑖
𝑃
𝑑𝑢𝑘+𝑗 … 𝑑𝑢1
𝑃
𝑖=𝑘+1
𝑡1 ≤ 𝑎 𝑡1 ≤ 𝑎
= 𝐹1 𝑡 𝐹1 𝑥
≤
That is, 𝐹1 𝑡 is NBU, and since 𝛬(𝑡) is super additive, it follows that 𝐹𝑎 𝑡 is NBU. ■
𝐷=
𝑧𝑘 1 𝑥 + 𝑡1 𝑃 𝐷=
𝑘 1 =0
𝑌𝑖 𝑥 + 𝑡1 ≤ 𝑎
𝑧𝑘 2 𝑡1 𝑃 𝑘 2 =0
𝐹𝑎 𝑥 + 𝑡1 𝐹𝑎 𝑡1
𝑧𝑘 1 𝑥 + 𝑡2 𝑃 𝑘 1 =0
𝑘2
∞
𝑌𝑖 𝑡1 ≤ 𝑎
𝑧𝑘 2 𝑡2 𝑃
𝑖=1
𝑘 2 =0
𝑌𝑖 𝑡2 ≤ 𝑎 𝑖=1
𝑘1
𝑃 0≤𝑘 1 < 𝑘 2 0 and 𝑥 ≥ 0. Let 𝑧𝑘 𝑡 be defined as in Theorem 3.1. Then by (2.3) we have
(a) for any t, 𝐺𝑡 𝑢 = 𝑃 𝑌 𝑡 ≤ 𝑢 is PF2 ;
𝑘1
𝑡2 𝑡1
𝑃
𝑘2 𝑖=1 𝑌𝑖 𝑘1 𝑖=1 𝑌𝑖
Proof. We need to prove that the determinant
Theorem 3.3. Suppose 𝜆𝑘 ↑, 𝜆 𝑡 ↑ and 1 𝑡 𝑌 𝑡 = 𝑡 0 𝑋 𝑢 𝑑𝑢. Suppose further that
∞
×
𝑃
Then 𝐹𝑎 𝑡 in (2.3) is IFR.
Although 𝐹𝑎 𝑡 is NBU, it need not
Remark 6. be an IFR.
𝑌𝑖 𝑥 + 𝑡2 ≤ 𝑎
is non-decreasing in 𝑥 ; and
𝑖=1
×
𝑌𝑖 𝑥 + 𝑡1 ≤ 𝑎 /𝑃 𝑖=1
𝑘
− 𝜆𝑖 𝑢𝑖 𝐸
𝑘
𝑌𝑖 𝑥 + 𝑡1 ≤ 𝑎
𝑃
𝑌𝑖 𝑥 + 𝑡2 ≤ 𝑎
𝑖=1
𝑖=1
𝑘2
𝑃
3.2
𝑘2
𝑌𝑖 𝑡1 ≤ 𝑎 𝑖=1
IJSER © 2012 http://www.ijser.org
𝑃
𝑌𝑖 𝑡2 ≤ 𝑎 𝑖=1
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER-2012
63
ISSN 2229-5518
by the basic composition theorem (Karlin, Total Positivity [1968]). For t1 < t 2 , the first determinant is non-negative (Karlin and Proschan [1960], (Theorem 3) ). From assumptions (a) to (c), it is easy to verify that 𝑘 1 +𝑗 𝑖=1 𝑌𝑖 𝑘 1 +𝑗 𝑖=1 𝑌𝑖
𝑃 𝑃
≥
≥
𝑥 + 𝑡2 ≤ 𝑎
𝑃 𝑃 𝑃
𝑘 1 +𝑗 𝑖=1 𝑌𝑖 𝑘 1 +𝑗 𝑖=1 𝑌𝑖 𝑘1 𝑖=1 𝑌𝑖 𝑘1 𝑖=1 𝑌𝑖
4. SOME PARTIAL ORDERINGS RELATED TO THE MODEL In this Section, we compare two systems having different damage distributions, but fixed identical threshold.
𝑥 + 𝑡1 ≤ 𝑎
𝑃
It follows from (3.3) that the second determinant on the right hand side of (3.2) is non-negative and by Remark 1, the proof is complete. ■
𝑡1 ≤ 𝑎
4.1 Stochastic Orderings
𝑡2 ≤ 𝑎
Suppose the i - th shock causes a damage 𝑋𝑖 and 𝑊𝑖 to the first and second systems, respectively and each system fails if the corresponding accumulated damage exceeds a common fixed threshold 𝑎. Let 𝑇1 and 𝑇2 denote the failure times of the system one and two, respectively. Then, their respective survival distributions are
𝑡1 ≤ 𝑎 𝑡2 ≤ 𝑎 (3.3)
𝐹1𝑎 𝑡 = 𝑃 𝑇1 > 𝑡 ∞
= 𝑒𝑥𝑝 −𝜆0 𝑡
1+
𝜆1 … 𝜆𝑘 𝑘=1
𝑡
𝑢1
× 0
𝑢 𝑘 −1
…
0
𝑘
𝑃
𝑘
𝑋𝑖 𝑢𝑖 ≤ 𝑎 × 𝑒𝑥𝑝
𝜆𝑗 −1 − 𝜆𝑗 𝑢𝑗 𝑑𝑢𝑘 … 𝑑𝑢1
𝑖=1
0
4.1
𝑗 =1
and 𝐹2𝑎 𝑡 = 𝑃 𝑇2 > 𝑡 ∞
= 𝑒𝑥𝑝 −𝜆0 𝑡
1+
𝜆1 … 𝜆𝑘 𝑘=1
𝑡
× 0
𝑢1 0
𝑢 𝑘−1
…
𝑘
𝑃 0
𝑘
𝑊𝑖 𝑢𝑖 ≤ 𝑎 × 𝑒𝑥𝑝 𝑖=1
𝜆𝑗 −1 − 𝜆𝑗 𝑢𝑗 𝑑𝑢𝑘 … 𝑑𝑢1 𝑗 =1
IJSER © 2012 http://www.ijser.org
4.2
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
64
ISSN 2229-5518
We shall now establish the following result.
(b) for 𝑡1 < 𝑡2 , 𝐺𝑡2 (𝑢)/𝐺𝑡1 (𝑢) and 𝐻𝑡2 (𝑢)/ 𝐻𝑡1 (𝑢) are both non-decreasing in 𝑢 ;
Theorem 4.1. If 𝑋𝑖 𝑡 ≥ 𝑊𝑖 𝑡 , for 𝑖 = 1, 2, . .. 𝑠𝑡 and for each 𝑡 ≥ 0, then 𝑇1 ≤ 𝑇2 .
(c) for 𝑡 > 0, 𝐻𝑡 (𝑢)/𝐺𝑡 (𝑢) in non-decreasing in 𝑢; and
Proof. Since for each 𝑡 ≥ 0, 𝑋𝑖 𝑡 ≥ 𝑊𝑖 𝑡 , for 𝑖 = 1, 2, . .., we have
(d) for 𝑡1 < 𝑡2
𝑃 𝑋𝑖 𝑡 ≤ 𝑥 ≤ 𝑃 𝑊𝑖 𝑡 ≤ 𝑥
𝑃
for all 𝑥.
𝑃
It follows from (4.1) and (4.2) that 𝐹1𝑎 𝑡 ≤ 𝑠𝑡 𝐹2𝑎 𝑡 or 𝑇1 ≤ 𝑇2 . ■
𝑡 𝑋 𝑡 0
𝑍 𝑡 =
1
𝑡 𝑡 0
𝐹1𝑎 𝑡 =
𝐹2𝑎 𝑡 =
𝑖=1
= 𝑘) 4.3 𝑃
𝑍𝑖 𝑡 ≤ 𝑎 𝑃(𝑁(𝑡) 𝑖=1
= 𝑘) 4.4 We need to prove that the determinant
𝑘1
𝑧𝑘 1 𝑡1 𝑃
𝐷1 = 0
𝑧𝑘 1 𝑡2 𝑃 𝑘 1 =0
𝑖=1
∞
𝑘2
∞
𝑘2
𝑌𝑖 𝑡1 ≤ 𝑎 𝑖=1
𝑧𝑘 2 𝑡2 𝑃 𝑘 2 =0
𝑌𝑖 𝑡2 ≤ 𝑎 𝑖=1
𝑘1
𝑃 𝑧𝑘 1 𝑡1 𝑧𝑘 2 𝑡1
𝑧𝑘 1 𝑡2 𝑧𝑘 2 𝑡2
≥
𝑌𝑖 𝑡2 ≤ 𝑎
𝑖=1
𝑧𝑘 2 𝑡1 𝑃
𝐹1𝑎 𝑡2 𝐹2𝑎 𝑡2
𝑘1
∞
𝑌𝑖 𝑡1 ≤ 𝑎
𝐹1𝑎 𝑡1 𝐹2𝑎 𝑡1 4.5
for t1 < t 2 , 𝐹2𝑎 𝑡2 > 0. Let 𝑧𝑘 𝑡 be defined as in Theorem 3.1. Then by (2.3) we have
𝑘 1 =0
0≤𝑘 1 < 𝑘 2 ) P(Y > ) , for all real . It is by
X n , n = 1,2,
n = 1,2, .
For ease of reference, we first state the definitions of stochastic order and geometric process as follows.
denoted
n1
process. The number a is called the ratio of the geometric process.
N = n
2. DESCRIPTION OF THE MODEL
a
such that
is said to be stochastically
monotone, if
X n1 | X n = i1 st X n1 | X n = i2 , for any 0 i1 i2 . IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
131
ISSN 2229-5518
the standby one begins to work. The repair discipline is ‖first in first out‖. Whenever the repair of the failed one is completed, it either begins to work again or become under cold standby. If a component fails during the repair of the other, it must wait for repair and the system is down. A4
Assume that the time interval between the completion of the (n 1) th repair and the completion of the n th repair of component i is called the n th cycle of component i, i = 1,2; n = 1,2,. Let (i ) (i ) (i ) X n , Yn and Z n be respectively the working time, the repair time and the delay repair time of component i in the n th cycle, i, i = 1,2; n = 1,2, Obviously, X n(i ) , Yn(i ) and Z n(i ) are respectively a sequence of nonnegative random variables, we define F, G and H respectively as a distribution for X n(i ) , Yn(i ) and The Z n(i ) , i, i = 1,2; n = 1,2,. distributions of X n(i ) respectively denoted by
and
Yn(i )
are
Fn(i ) (t ) = F (ain1t ); Gn(i ) (t ) = G(bin= 1t )
where t 0, n = 1,2,,i 1,0 < bi 1, and assume that 1 1 E[ X 1(i ) ] = > 0, E[Y1(i ) ] = > 0, i = 1,2. i Thus X n(i ) i = 1,2.; n = 1,2, and Yn(i ) i = 1,2. n = 1,2, are, respectively, a stochastically decreasing geometric process with the ratio ai and a stochastically increasing geometric process with the ratio bi. And assume that Z n(i ) , i = 1,2. n = 1,2, is a sequence of nonnegative random variables with same distribution function 1 H (t ), t > 0 and assume that E[ Z n(i ) ] = .
A5
The survival time X n(i ) , the repair time Yn ( i ) and Z n(i ) , (n = 1,2,) all are independent random variables.
A6
Assume that the replacement policy T based on the number of failures of component 1 is used. The system will be replaced sometime by a new and identical one, and the replacement time is negligible.
A7
Assume that any component in the system cannot produce the working reward during cold standby, and no cost is incurred during waiting for repair and delay repair.
A8
Assume that the repair cost rate of component i is cr(i ) (i = 1,2) while the working reward rate of two components is same c . And the replacement cost of the system is C .
3. THE REPLACEMENT POLICY T In this section, we will consider the replacement policy T based on the number of failures of component 1. Because the two components appear alternately in the system, when the failure number of component 1 reaches T , then component 2 may be in the cold standby state or in the repair state or in the delay repair state. Naturally, a practicable replacement policy T should be that component 1 is not repaired any more when the failure number of component 1 reaches T ; while component 2 works until failure in the N th cycle. Thus, the renewal point under the policy T is established. Let 1 be the first replacement time of the system, and n (n 2) be the time between the (n 1) cth replacement and the n th replacement of the system under policy T : Obviously ,{ 1 , 2 ,} forms a renewal process, and the interarrival time between two consecutive replacements is called a renewal cycle. Our problem is to determine an optimal replacement policy T such that the average cost rate of the system is minimized. Let C (T ) be the average cost rate of the system with imperfect delay repair under policy T . Thus, according to
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
132
ISSN 2229-5518
renewal reward theorem (see, for example Ross [19]), we have C (T ) =
1 G (T ) E Yi = n n . b n =1 i =1
the expected cost incurred in a renewal cycle the expected length of a renewal cycle
The working age T of the system at time t is the cumulative life-time given by t Mn
T =
Ln 1
Ln M n t < Ln 1 M n
Ln = X i i =1
C (T ) =
n
and
M n = Yi
Gn (T ) Fn (T ) R c r r1 p n n2 b n =1 n =2 a F (T ) G (T ) n n 1 n n b n =1 a n =1
c
and
i =1
L0 = M 0 = 0 .
where E (Z ) = .
Let T1 be the first replacement time and in general for n = 2,3,, let Tn be the time between the (n 1) -st replacement and the n -th replacement. Thus the sequence T1 , T2 , constitutes a renewal process. Thus a cycle is completed, if a replacement is done. By the theory of renewal reward process, the long-run average cost per unit time is given by
C (T ) =
Using equations (2) and (3) in equation (1), we obtain on simplification that
Ln 1 M n t < Ln 1 M n 1 n
where
where Gn () is the n -fold convolution of G () with itself.
4. CONCLUSION In this paper, using geometric process repair model, we studied a cold standby repairable system consisting of two dissimilar components and one repairman with imperfect delay repair under T policy. We have also derived the long-run average cost under this policy.
REFERENCES
expected cost incurred in a cycle expected length of a cycle
1 E ciYi R c p E ( Z ) E Ri X i i =1 , = i =1 1 E X i E Yi E ( Z ) i =1 i =1
[1]
Barlow, R.E. and Hunter, L.C., (1960) Optimum preventive maintenance policy.
[2]
Brown, M. and Proschan, F., (1983) (1) Imperfect repair. J. Appl. Prob. 20, 851-859.
[3]
Lam, Y., (1988) Geometric processes and replacement problem. Acta Math. Appl. Sin. 4(4), 366-377.
[4]
Lam, Y., (1990) A repair replacement model. Adv. Appl. Prob. 22, 494-497.
[5]
Lam, Y., (1991) An optimal repairable replacement model for deteriorating systems. J. Appl. Prob. 28, 843-851.
[6]
Lam, Y., (2007) The Geometric(2) Process and Its Applications. World Scientific Publishing CO. Pte. Ltd., Singapore.
where is a random variable which denotes the number of failures in time T . Since is also a stopping time with respect to the -fields < X1 , X 2 ,, X >, = 1,2,, by Wald‘s equation, we have F (T ) E X i = n n 1 . n =1 a i =1 where Fn () is the n -fold convolution of F () with itself and
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
133
ISSN 2229-5518
[7]
Leung, K.N.G., (2005) A Note on a Bivariate Optimal Replacement Policy for a Repairable System, Engineering Optimization, 38, 621 -625.
[8]
Finkelstein, M. S., (1993) A scale model of general repair. Microelectron. Reliab. 33, 41-44.
[9]
Stadje, W. and Zuckerman, D., (1990) Optimal strategies for some repair replacement models. Adv. Appl. Prob. 22, 641-656.
[10] Stanley, A. D. J., (1993) On geometric processes and repair replacement problems. Microelectron. Reliab. 33, 489-491. [11] Zhang, Y.L., (1994) A bivariate optimal
replacement policy for a repairable system. J. Appl. Prob. 31, 1123-1127.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
134
ISSN 2229-5518
District-wise Component Analysis of the Growth of Cotton Production in Tamil Nadu R. Meenakshi Abstract: This paper analyzes the components of cotton production in the districts of Tamil Nadu during the pre and post reform periods. Index Terms - Component Analysis, Cotton Production, Reform Periods.
—————————— ——————————
1. INTRODUCTION attempt is made here to analyze the ANcomponents of cotton production in districts of Tamil Nadu state in pre and post reform periods. The agricultural development and the prosperity of rural masses in Tamil Nadu state mainly depend upon sound agricultural base. Cotton production by and large can be increased by increasing area under cultivation, double cropping and raising yield of cotton by the application of new agricultural technology and by the reorganization of institutional factors. The favourable resource-base complemented by suitable modern technologies facilitated to increase cotton output and yield in the state. The total cotton production in Tamil Nadu state was estimated at 225448 (in bales of 170 kg / lint) which contributes around 11 percent of all India cotton production in 2009 – 2010. In recent years many attempts have been made to assess the growth of cotton production of Tamil Nadu state. So a quantitative assessment of the growth of cotton and the contribution of components to the cotton production in this state assumes significance.
R. Meenakshi is serving as Associate Professor and Head of the Department of Economics, Sri Sarada College for Women, Salem, India.
Accordingly an attempt has been made in the present study to apply the seven-factor model with a view to identify the contribution of the components to cotton production in districts of Tamil Nadu state and state as a whole in pre and post reform periods.
2. METHODOLOGY AND DATA The basic data comprises year-wise information on area, production yield and price of cotton and the total cropped area in districts of Tamil Nadu state and they are obtained from ‗Season and Crop Reports‘ published by Tamil Nadu Government for the pre-reform period 1971-72 to 1989-90 and post-reform period 1990-91 to 2009-10. The growth of cotton production for the purpose of decomposition analysis in pre-reform period has been compiled as a change in production of current period (taken as an average of the last three years) 1987-88 through 1989-90 over the base period ( taken as an average of first three years) 1971-72 through 1973-74 for each time period and in the post-reform period the data have been compiled as a change in production of current period (average of the last three years) 2007-08 through 2009-10 over the base period (average of first three years) 1990-91 through 1992-93. The changes in components have also been similarly computed on the basis of three-year averages of base and current years. Constant price weights have been assigned to cotton crop based on the three year average of farm harvest prices of 1971-72, 1972-73 and 1973-74 in pre-reform period and 1990-91, 1991-92 and 1992-93 in postreform period.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
135
ISSN 2229-5518
The seven component elements of decomposition analysis are (i) (ii) (iii) (iv) (v) (vi) (vii)
area yield rate cropping pattern area and yield area and cropping pattern yield and cropping pattern area, yield and cropping pattern.
Each component of the equation was multiplied by 100 and divided by the total components under consideration so as to obtain a percentage growth rate of each component. These percentage would help one to directly assess the share of each component in the growth rate of cotton production. The study addresses itself to the main issues viz, A)
The following is the equation of the model. Pt = P0 = (At – A0) n
W
i
B)
Cio Yio
t n
A0 Wi Cio (Yit Yio ) t
Identifying the components that have contributed to the increase in cotton production in districts of Tamil Nadu state. Analyzing the factors which have contributed to the cotton production and quantifying the relative contribution of each component in the growth of cotton in districts of Tamil Nadu state and state as a whole.
n
A0 Wi Yio (Cit Cio ) t n
( At A0 ) Wi Yio (Cit Cio ) t n
( At A0 ) Wi (Yit Yio )Cio t n
A0 Wi (Cit Cio )(Yit Yio ) t
n
A t A0 Wi (Cit Cio ) (Yit Yio ) t
where Pi Po Wi Cio Cit Yio
= production in the current period = production in the base period = weight used for each crop = cropping pattern in the base year = cropping pattern in the current period = yield level in the base year
Yit = yield level in the current period Ao = gross cropped are in the base year At = gross cropped area in the current year Further Pt and Po were equated as under. n
Pt
= A t Wi Cit Yit t n
P0
= A0 Wi Cio Yio t
3. RESULTS AND DISCUSION Different variables i.e. acreage, yield, change in crop pattern for cotton crop in districts of Tamil Nadu state in pre and post reform periods were estimated in tables with a view to identify their relative contribution to production. Substituting these variables in the decomposition model, the contribution of different factors i.e. area, yield, cropping pattern towards cotton production is thus illustrated for all districts and state as a whole. The contribution of components to the cotton production is shown in district-wise analysis the pre-reform period and post-reform period.
4. PRE-REFORM PERIOD 4.1 CHENGALPATTU- MGR
Table I presents a contribution of different components to production of cotton in this region in the pre-reform period. The study results in the table reveal that the only factor contributing to the highest increase in cotton production was yield (111.23%). Acreage, I order interaction between area and crop pattern and the I order interaction between yield and crop pattern also account for positive effects of cotton production. The remaining factors do not account for increase in IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
136
ISSN 2229-5518
production and have destabilizing effects on cotton growth. 4.2 SOUTH ARCOT
Table I reveals that as far as the influence of crop pattern (37.64%) is concerned, it is responsible for the maximum increase in cotton production in South Arcot in pre-reform period. What is surprising in this district is that all components resulted in a positive production growth. The analysis reveals that the whole increase in cotton production in South Arcot region was brought by all components though the positive entries of crop pattern, yield and I order interaction between yield and crop pattern are more than the positive entries of the remaining components of cotton production. 4.3 NORTH ARCOT – AMBEDKAR – THIRUVANNAMALAI SAMBUVARAYAR
In this region, the data provided show that crop pattern contributed positively and significantly towards increase in cotton production followed by I order interaction between area and crop pattern (25.80%). The yield factor and the I order interaction between yield and crop pattern have also added a positive contribution towards cotton crop production. A small decrease in production was noticed by I order interaction between area and yield, acreage and II order interaction between area, yield and crop pattern. 4.4 SALEM – DHARMAPURI
production followed by the significant contribution of crop pattern (54.62%) for cotton production. The influence of yield accounts for reduction in crop production. The first order interaction terms namely (i) interaction between area and yield (ii) yield and crop pattern had also added a positive contribution towards cotton production. The other interaction terms had a destablishing effect on production. 4.6 TIRUCHIRAPPALLI – PUDUKOTTAI
As regards cotton production in Tiruchirappalli – Pudukottai region is concerned it may be noted that the highest positive entry of the component is crop pattern (96.11%). Factors like acreage and I order interaction between area and crop pattern showed positive contribution towards production. All other components added negative effect towards cotton crop production. 4.7 THANJAVUR
With regard to Thanjavur district, the contribution of crop pattern in positive (138.43%) and there is every reason to believe that this component plays an important role in increasing the production of cotton. The first order interaction between area and yield and second order interaction between area, yield and crop pattern are also positive but negligible towards increase in production. The remaining components are found to be negative and are not responsible for cotton growth is this region. 4.8 MADURAI – DINDIGUL
The results indicate that the pure effect of crop pattern (47.05%) contributed positively and significantly towards increase in cotton production in Salem and Dharmapuri. The next component that has resulted in a positive increase in production was I order interaction between yield and crop pattern (23.35%). Similar to South Arcot district, the contribution of all components in Salem – Dharmapuri had added a positive effect towards increase in cotton production.
Considering the importance of increase in cotton production in Madurai – Dindigul, it may be noted that components like crop pattern (64.25%), yield (22.94%) and I order interaction between yield and crop pattern (21.59%) do contribute positively and significantly towards this crop. The contribution of the remaining components is found to be negative and seemed to be the source of instability in cotton production. 4.9 RAMANATHAPURAM – KAMARAJAR – PASUMPON MUTHURAMALINGAM
4.5 COIMBATORE - PERIYAR
It may be recalled from Table I that as far as the influence of acreage (58.61%) is concerned, it is responsible for the significant increase in cotton
It may be seen from Table I that the crop pattern (52.81%) and I order interaction between yield
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
137
ISSN 2229-5518
and crop pattern (51.42%) seemed to be the main source for the significant increase in cotton production in this area. To a certain extent yield had also showed a positive effect towards production. The remaining components failed to contribute towards increase in cotton crop production. 4.10 TIRUNELVELI – CHIDAMBARANAR
Table I shows that the I order interaction between yield and crop pattern (58.19%) contributed positively and significantly towards increase in cotton production in this area. The influence of yield (49.31%) and crop pattern (26.82%) had added a positive contribution towards this crop. As against this acreage, I order interaction terms namely (i) between area and crop pattern (ii) between area and yield and second order interaction between area, yield and crop pattern had a destablishing effect production. 4.11 TAMIL NADU
The state accounted for the maximum increase in cotton crop production through yield component. The study results in Table 3.11 and Figure 3.11 reveal that the other factors contributing to the increase in cotton production were I order interaction between area and crop pattern and II order interaction between area, yield and crop pattern. The remaining components did not account for increase in production and had a destablising effect on cotton growth.
The overall result shows that the significant increase in cotton production is achieved by the influence of crop pattern followed by yield component. Considering the importance of cotton production in post-reform period an in-depth study is again taken up for the districts of Tamil Nadu and state as whole. Different variables i.e. acreage, yield, crop pattern and their interaction terms were estimated in the following Table I with a view to identify their relative contribution to cotton production.
5. POST-REFORM PERIOD 5.1 CHENGALPATTU- CHENNAI – KANCHEEPURAM - THIRUVALLUR
Table II shows that as for as the influence of crop pattern (81.42%) is concerned, it is responsible for the significant increase in cotton production. Contrary to this, yield component (-26.84%) did not account for increase in production and had a destablishing effect on cotton growth. The positive entries of acreage followed by I order interaction between yield and crop pattern had contributed to the large share of the increase in production. Again I order interaction between area and yield, I order interaction between area, yield and crop pattern appear to be positive components contributing more or less equal percentage towards increase in cotton production. With the exception of yield and I order interaction between area and crop pattern, other factors are responsible for increase in cotton production. 5.2 SOUTH ARCOT – CUDALLORE – VILUPPURAM
The percentage contribution of different variables to total increased cotton production in this region is shown in Table II. The study results reveal that the factor contributing to the highest increase in cotton production was acreage (80.47%) followed by yield (69.26%). The I order interaction terms namely (i) interaction between area and crop pattern (ii) yield and crop pattern account for a positive effect towards production. The remaining components failed to account for increase in production and had destablising effects on cotton growth. 5.3 NORTH ARCOT – VELLORE – THIRUVANNAMALAI SAMBUVARAYAR
Table II shows that acreage (87.64%) is responsible for the significant increase in cotton production followed by yield component (23.08%). The positive contribution of acreage and yield resulted in the positive contribution of I order interaction between area and yield. All other components are negative and had contributed to the decrease in cotton crop production.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
138
ISSN 2229-5518
5.4 SALEM – NAMAKKAL
The results indicate that the pure effect of yield (123.17%) contributed positively and significantly towards increase in cotton production. The crop pattern had also added a positive effect towards increase in production. Due to this the first order interaction between yield and crop pattern is found to be positive and accounted for the growth of cotton. Acreage I order interaction terms (i) between area and crop pattern (ii) area and yield and II order interaction between area, yield and crop pattern do have a more destabilizing influence on cotton production. 5.5 DHARMAPURI – KRISHNAGIRI
The data provided in Table II show that all the major components namely acreage, yield and crop pattern when considered independently contribute towards increase in cotton production and among these three components acreage (55.87%) accounted for the maximum increase in cotton crop followed by yield (51.06%). All the I order interaction terms failed to contribute to the growth of cotton production. However the second order interaction between area, yield and crop pattern had added a positive contribution towards cotton production. 5.6 COIMBATORE – THIRUPPUR
With regard to Coimbatore district, the contribution of crop pattern is positive (104.78%) and there is every reason to believe that this component plays an important role in increasing the production of cotton. Acreage and yield failed to contribute towards increase in production. Due to this, the first order interaction between acreage and yield was also negative revealing destabilizing effect on cotton crop. The remaining components accounted for the positive increase in production. 5.7 ERODE
In Erode district crop pattern (107.43%) plays an important role in influencing cotton crop. Contrary to crop pattern, yield component does have a more destabilizing influence on this crop. The positive entry of crop pattern overweighs the negative entry of yield. As a result the I order
interaction between yield and crop pattern is found to be positive and had added a positive contribution towards cotton production. Components like acreage, I order interaction between area and yield are also positive in this region. The remaining components accounted for decrease in production due to their negative entries in cotton production. 5.8 TIRUCHIRAPPALLI – KARUR – PERAMBALUR – ARIYALUR
In this region both crop pattern (97.54%) and yield (24.05%) seemed to be the main source for the significant increase in cotton production. Due to this, the I order interaction between yield and crop pattern had added a positive contribution towards cotton production. Acreage is found to be negative. It is because of the negative entry of acreage, components like I order interaction between area and crop pattern, area and yield, II order interaction between area, yield and crop pattern are responsible for decrease in cotton production. 5.9 PUDUKOTTAI
With respect to Pudukottai district, the contribution of crop pattern (123.28%) is positive and significant towards increase in cotton production. Components like acreage and I order interaction between area and yield are also positive and hence they are responsible for increase in production. All other components are negative and seemed to be the source of instability in cotton crop. 5.10 THANJAVUR – THIRUVARUR – NAGAI QUAID-E-MILLETH – NAGAPATTINAM
The results indicate that crop pattern (98.17%) contributed significantly towards increase in cotton production followed by yield. Along with these components, the positive values of I order interaction between area and crop pattern, I order interaction between area and yield had added an increase in cotton production. The remaining components are found to be negative and hence
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
139
ISSN 2229-5518
failed to contribute towards increase in production of cotton crop. 5.11 MADURAI – THENI – DINDIGUL
Considering the importance of cotton production in this area, crop pattern (103.53%) does contribute significantly towards increase in production. Next to this I order interaction between yield and crop pattern and acreage and crop pattern contribute positively towards cotton. Again the entry of I order interaction between area and yield had added positive increase in production. All other components failed to increase cotton crop production. 5.12 RAMANATHAPURAM – VIRUDHUNAGAR – KAMARAJAR – PASUMPON MUTHURAMALINGAM – SIVAGANGAI The data provided in Table II reveal that all the major components namely acreage, yield and crop pattern when considered independently contribute towards increase in production and among these components, crop pattern accounted for the maximum increase in cotton production (89.80%) followed by yield (28.83%) and acreage (23%). All I order interaction terms failed to contribute to the cotton growth. But the II order interaction between area, yield and crop pattern had added a positive effect towards increase in production. 5.13 THIRUNELVELI – THOOTHUKUDI
The study results indicate that crop pattern (98.97%) contributed positively towards increase in cotton production followed by acreage. Contrary to these two components, yield is found to be negative and had a destabilizing effect towards production. Again I order interaction between area and crop pattern, II order interaction between area, yield and crop pattern failed to contribute towards the growth of production of cotton. The remaining components contribute towards increase in cotton production. 5.14 TAMIL NADU
For the state as a whole the increase in cotton production was mainly due to the influence of crop pattern (97.15%) followed by acreage (32.53%). With these two components the I order
interaction between area and yield and the interaction between yield and crop pattern account for increase in production. All the remaining components had negative entries and hence they were not responsible for cotton production growth. The overall result shows that the significant increase in cotton production is achieved by the influence of crop pattern in pre-reform period and yield in the post-reform period.
6. CONCLUSION Considering the importance of cotton production in Tamil Nadu state an in-depth study is now necessary to identify different constraints to the productivity and then efforts should be made for enhancing cotton productivity to meet the domestic requirements of cotton in Tamil Nadu state. In Tamil Nadu state, cotton is grown under risky conditions by resource poor farmers. Hence technologies for this unfavourable environment and packages of practices to suit these farmers must be developed. Rainfed cotton crop research is to be a priority. To improve the cotton production the following measures may be considered. Better cultural practices and the use of tractors instead of bullocks in seed-bed preparation after initial watering of land is positively related to yields. Farm characteristics including the farmer‘s education is an important dimension affecting the difference between below and above average yields. A positive link between the farmer‘s visit to extension agency for advice and his endseason cotton output is not as apparent as commonly hypothesized. Attempts to identify a common and robust pattern of spray timings applicable for the entire area. Minimization of inflator trends in factor prices is very essential.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
140
ISSN 2229-5518
Assuring remunerative output prices, through effective support price mechanism is the need of the hour. Though cotton crop has received attention to a certain extent by the policy makers in recent years, in view of the present need, more efforts have to be focused on research and development in the cotton crop. Liberalized import substitution and export promotional policies may be encouraged. Greater degree of specialization and professionalism are to be inducted in expanding the production of cotton if Tamil Nadu state is to emerge as the leading producer of cotton in India.
ACKNOWLEDGEMENTS
[5] S. Narender, et al, ―District-wise Measurement and Decomposition of the Growth of Agricultural Output in Andhra Pradesh‖, Agricultural Situation in India, April, 1989, 3-7. [6] Peter B.R. Hazell, ―Instability in Indian Foodgrain Production‖, Research Report 30, IFPRI, Washington DC, U.S.A. 1982. [7] R. Swarup and B.K. Sikka ―Agricultural Development in Himachal Pradesh‖, Agricole Publishing company, 1983, 64-68. [8] S. Mahendradev, ―Growth and Instability in Foodgrains Production: An Inter-State Analysis‖, Economic and Political Weekly. Sept., 26, 1987, pp A82-A92, [9] Suresh Pal and A.S. Sirohi, ―Sources of Growth and Instability in Indian Crap Production-A Decomposition Analysis‖, Agricultural Situation in India, Feb., 1989, 933-936.
The Author is highly thankful to the project fellow Ms. S. Deepalakshmi for data collection.
REFERENCES [1] A.V.K. Sastri, ―Relative contribution of Area and Yield to Increased Production of Wheat during the First Plan‖, Agricultural Situation in India, Vol. XV, No. 5, August, 1960, 481-486. [2] B.S. Minhas, ―Rapporteur‘s Report on Management of Agricultural Growth‖, Indian Journal of Agricultural Economics, Vol. XXI, No, 4, Oct.-Dec. 1966. [3] B.S. Minhas and A. Vaidyanathan, ―Growth of Crop Output in India, 1951-54 to 1956-61: An Analysis of component Element‖, Journal of Indian Society of Agricultural Statistics, Vol. XVII, No. 2, Dec., 1965, 230-252. [4] J.R. Anderson, Peter BR. Hazell and L. Evans, ―Variability in cereal Yield: Implications for Agricultural Research and Policy‖, Summary Proceedings of IFPRI/DSE Workshop on cereal Yield Variability, Feldanfing. Germany, Nov., 1986, 26-29.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 10, OCTOBER-2012
141
ISSN 2229-5518
TABLE I
DISTRICT- WISE PERCENTAGE CONTRIBUTION OF DIFFERENT VARIABLES TO TOTAL INCREASED COTTON PRODUCTION IN PRE-REFORM PERIOD (1971 - 1972 to 1989 - 1990) IN TAMIL NADU DISTRICT
1
2
3
4
5
6
7
Total
1.
Chengalpattu-MGR
0.09
111.23
-11.87
0.34
-0.03
0.19
-0.05
100.00
2.
South Arcot
5.13
31.87
37.64
2.96
2.51
18.43
1.46
100.00
-3.54
1.49
69.91
25.80
-0.55
10.91
-4.02
100.00
6.60
1.25
47.05
12.35
3.27
23.35
6.13
100.00
58.61
-5.99
54.62
-8.99
0.99
0.92
-0.16
100.00
12.07
-8.83
96.11
18.68
-1.72
-13.66
-2.65
100.00
3.
4. 5. 6.
North Arcot (AmbedkarThiruvannamalaiSambuvarayar) Salem – Dharmapuri Coimbatore – Periyar Tiruchirappalli – Pudukottai
7.
Thanjavur
-1.60
-1.18
138.43
-22.13
0.19
-16.32
2.61
100.00
8.
Madurai – Dindigul
-3.38
22.94
64.25
-3.19
-1.14
21.59
-1.07
100.00
-4.26
22.97
52.81
-9.53
-4.14
51.42
-9.28
100.00
-4.97
49.31
26.82
-5.85
-10.78
58.19
-12.72
100.00
-228.40
466.24
-70.18
9.12
-60.58
-18.62
2.42
100.00
9.
10. 11.
Ramanathapuram (KamarajarPasumponmuthu Ramalingam) Tirunelveli Chidambaranar Tamil Nadu
Source : Compiled by the Author. 1.Area 2.Yield 3.Crop Pattern
4. 5. 6. 7.
I order interaction between area and crop pattern I order interaction between area and yield I order interaction between yield and crop pattern II order interaction between area, yield and crop pattern
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER - 2012
142
ISSN 2229-5518
TABLE II DISTRICT- WISE PERCENTAGE CONTRIBUTION OF DIFFERENT VARIABLES TO TOTAL INCREASED COTTON PRODUCTION IN POST-REFORM PERIOD (1990 - 1991 to 2009 - 2010) IN TAMIL NADU DISTRICT 1.
2.
3. 4. 5. 6. 7. 8. 9. 10.
11.
12
13.
ChengalpattuChennaiKancheepuramThiruvallur South Arcot – CuddaloreVillupuram North ArcotVelloreThiruvannamalaiSambuvarayar Salem –Namakkal DharmapuriKrishnagiri CoimbatoreThiruppur Erode TiruchirappalliKarur-PerambalurAriyalur Pudukottai ThanjavurThiruvarur-NagaiQuid-e-millethNagapattinam Madurai-TheniDindigul RamanathapuramVirdhunagarKamarajarPasumpon Muthuramalingam –Sivagangai TirunelveliThoothukudi Tamil Nadu
1
2
3
4
5
6
7
Total
29.74
-26.84
81.42
-28.58
9.42
25.79
9.05
100.00
80.47
69.26
-56.09
21.56
-26.63
18.56
-7.13
100.00
87.64
23.08
-13.39
-10.38
17.90
-2.73
-2.12
100.00
-27.89
123.17
22.84
-5.84
-31.48
25.78
-6.59
100.00
55.87
51.08
19.99
-6.46
-16.49
-5.90
1.91
100.00
-0.84
-17.70
104.78
0.62
-0.11
13.17
0.08
100.00
54.66
-106.61
107.43
-33.24
32.98
64.84
-20.06
100.00
-18.70
24.05
97.54
-16.36
-4.03
21.03
-3.53
100.00
15.93
-13.38
123.28
-14.14
1.53
-11.86
-1.36
100.00
-7.15
20.54
98.17
6.26
1.31
-17.98
-1.15
100.00
27.66
-48.09
103.53
-19.19
8.90
33.37
-6.18
100.00
23.00
28.83
89.80
-17.91
-5.75
-22.45
4.48
100.00
17.91
-11.94
98.97
-15.57
1.88
10.38
-1.63
100.00
32.53
-32.24
97.15
-16.28
5.40
16.14
-2.70
100.00
Source : Compiled by the Author 1. Area 2. Yield 3. Crop Pattern
4. 5. 6. 7.
I order interaction between area and crop pattern I order interaction between area and yield I order interaction between yield and crop pattern II order interaction between area, yield and crop pattern
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 10, OCTOBER-2012
143
ISSN 2229-5518
History of Algebra U. Rizwan Abstract - This paper presents a review of the algebra and presents some facts.
Index Terms – Algebra, Geometry. —————————— ——————————
The Arabic word for restoration, al-jabru, is the root of the word algebra. The history of algebra goes way back in time, but its importance is unparalleled by any other branch of mathematics. The word Algebra literally means the re-union of broken parts based on the origins of Arabic language. It was first used around 830 AD by Arab scholars. The history of algebra began in ancient Egypt and Babylon, where people learned to solve linear (ax = b) and quadratic (ax2 + bx = c) equations, as well as indeterminate equations such as x2 + y2 = z2, whereby several unknowns are involved. The ancient Babylonians solved arbitrary quadratic equations by essentially the same procedures taught today. They also could solve some indeterminate equations. The Alexandrian mathematicians Hero of Alexandria and Diophantus continued the traditions of Egypt and Babylon. But Diophantus's book Arithmetica is on a much higher level and gives many surprising solutions to difficult indeterminate equations. This ancient knowledge of solutions of equations in turn found a home early in the Islamic world, where it was known as the science of restoration and balancing. In the 9th century, the Arab mathematician AlKhwarizmi wrote one of the first book on algebras in Arabic language, a systematic expose of the basic theory of equations,with examples and proofs. ——————————————
U. Rizwan is serving in the Department of Mathematics, Islamiah College, Vaniyambadi, India. E-mail:
[email protected]
By the end of the 9th century, the Egyptian mathematician Abu Kamil had stated and proved the basic laws and identities of algebra and solved s complicated problems as finding x, y, and z such that x + y + z = 10, x2 + y2 = z2, and xz = y2. Ancient civilizations wrote algebraic expressions using only occasional abbreviations, but by medieval times Islamic mathematicians were able to talk about arbitrarily high powers of the unknown x, and work out the basic algebra of polynomials (without yet using modern symbolism). This included the ability to multiply, divide, and find square roots of polynomials as well as a knowledge of the binomial theorem. The Persian mathematician, astronomer, and poet Omar Khayyam showed how to express roots of cubic equations by line segments obtained by intersecting conic sections, but he could not find a formula for the roots. A Latin translation of AlKhwarizmi's Algebra appeared in the 12th century. In the early 13th century, the great Italian mathematician Leonardo Fibonacci achieved a close approximation to the solution of the cubic equation x3 + 2x2 + cx = d. Because Fibonacci had traveled in Islamic lands,he probably used an Arabic method of successive approximations. Early in the 16th century, the Italian mathematicians Scipione del Ferro, Niccolò Tartaglia, and Gerolamo Cardano solved the general cubic equation in terms of the constants appearing in the equation. Cardano's pupil, Ludovico Ferrari, soon found an exact solution to equations of the fourth degree, and as a result, mathematicians for the next several centuries tried
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
144
ISSN 2229-5518
to find a formula for the roots of equations of degree five, or higher. Early in the 19th century, however, the Norwegian mathematician Niels Abel and the French mathematician Evariste Galois proved that no such formula exists. An important development in algebra in the 16th century was the introduction of symbols for the unknown and for algebraic powers and operations. As a result of this development, Book III of La geometrie (1637), written by the French philosopher and mathematician René Descartes, looks much like a modern algebra text. Descartes's most significant contribution to mathematics, however, was his discovery of analytic geometry, which reduces the solution of geometric problems to the solution of algebraic ones. His geometry text also contained the essentials of a course on the theory of equations, including his so-called rule of signs for counting the number of what Descartes called the true (positive) and false (negative) roots of an equation. Work continued through the 18th century on the theory of equations, but not until 1799 was the proof published, by the German mathematician Carl Friedrich Gauss, showing that every polynomial equation has at least one root in the complex plane (see Number: Complex Numbers).
and the Norwegian mathematicians Niels Abel and Sophus Lie. Quaternions were discovered by British mathematician and astronomer William Rowan Hamilton, who extended the arithmetic of complex numbers to quaternions while complex numbers are of the form a + bi, quaternions are of the form a + bi + cj + dk.
REFERENCES [1] Donald R. Hill, Islamic Science and Engineering (Edinburgh University Press, 1994). [2] Ziauddin Sardar, Jerry Ravetz, and Borin Van Loon, Introducing Mathematics (Totem Books, 1999). [3] George Gheverghese Joseph, The Crest of the Peacock: Non-European Roots of Mathematics (Penguin Book, 2000). [4] John J O'Connor and Edmund F Robertson, History Topics: Algebra Index. In Mac Tutor History of mathematics (University of St Andrews, 2005)
By the time of Gauss, algebra had entered its modern phase. Attention shifted from solving polynomial equations to studying the structure of abstract mathematical systems whose axioms were based on the behavior of mathematical objects, such as complex numbers, that mathematicians encountered when studying polynomial equations. Two examples of such systems are algebraic groups (see Group) and quaternions, which share some of the properties of number systems but also depart from them in important ways. Groups began as systems of permutations and combinations of roots of polynomials, but they became one of the chief unifying concepts of 19th-century mathematics. Important contributions to their study were made by the French mathematicians Galois and Augustin Cauchy, the British mathematician Arthur Cayley,
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11,NOVEMBER-2012 ISSN 2229-5518
145
Some More Filtering Techniques For The Removal of Speckle Noise From Medical Images Gnanambal Ilango and B. Shanthi Gowri Abstract - In Image Processing, removal of noise from the medical images is very challenging. Many filtering techniques have been introduced to reduce noise in medical images. The speckle noise is commonly found in medical images. This paper proposes twelve more filtering techniques for the removal of speckle noise from medical images. The quality of the enhanced images is measured by the statistical quality measures: RMSE and PSNR. Index Terms - Digital topological neighbourhood, Brain cancer, Speckle noise, RMSE, PSNR.
—————————— ——————————
1. INTRODUCTION image analysis plays a vital role in DIGITAL medical imaging like magnetic resonance imaging, ultra sound imaging, X-ray and computed tomography. Departure of the ideal signal is usually referred to as noise. The noises in such digital images arise during image acquisition and/or transmission. The data dropout noise is generally called as speckle noise. Speckle noise is a multiplicative noise that degrades the visual evaluation in medical imaging. Speckle noise suppression plays a very essential role in diagnosis. The image acquisition devices need despeckling techniques for medical imaging in routine clinical practice. Image filtering is an important technique used for the detection and removal of noise from the digital images. Median filter has been introduced by Turkey in 1970[10]. It is a non-linear filter used for smoothing the images. Sudha et al recommends a novel thresholding algorithm for denoising speckle noise in ultrasound images with wavelets[9]. ——————————————
Gnanambal Ilango is serving in the Department of Mathematics, Government Arts College, Coimbatore, India. E-mail :
[email protected] B. Shanthi Gowri is pursuing Ph.D. degree course in Mathematics, Government Arts College, Coimbatore, India and is working at Sri Krishna College of Engineering and Technology, Coimbatore, India. Email :
[email protected]
An improved adaptive median filtering method for denoising impulse noise reduction was carried out by Mamta Juneja et al [4]. Thangavel et al showed that the M3-filter had performed better than Mean, Median, Max, Min and various other filters [8]. The hybrid max filter which performs significantly better than many other existing techniques for removal of speckle noise was shown Gnanambal et al [1].In this experimental work, we took the Magnetic resonance image of the brain cancer with speckle noise, and applied different filtering techniques for noise removal. The quality of the de-noised image is measured by the statistical quality measures: RMSE and PSNR. This work is organized as follows: In Section 2, basic definitions are given. Section 3 discusses the various filtering techniques for de-noising the speckle noise in Medical images. Section 4 deals with the proposed new filtering techniques for denoising the speckle noise in MRI. Section 5 discusses the comparison of results of various new filtering techniques. Section 6 concludes the experimental results.
2. BASIC DEFINITIONS Definition 2.1 [7] A digital image is a function 𝑓: 𝑍 𝑋 𝑍 → [0,1,2, … . 𝑁 − 1] in which 𝑁 − 1 is a positive whole number belonging to the natural
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
146
ISSN 2229-5518
interval [1,256]. The functional value of ‗f‘ at any point p(x, y) is called the intensity or gray level of the image at that point and it is denoted by f(p). Definition 2.2 [7] Let X be an array of points having positive integer coordinates (x, y), where 1 ≤ 𝑥 ≤ 𝑚, 1 ≤ 𝑦 ≤ 𝑛. The neighbourhood of a point 𝑝 ∈ 𝑋 is a subset of X which contains an open set containing p. It is denoted by N (p). Definition 2.3 [6] The 4-neighbours of a point p(x, y) are its four horizontal and vertical neighbours 𝑥 ± 1, 𝑦 and 𝑥, 𝑦 ± 1 . The point p(x, y) together with its 4-neighbours is called the 4 - neighbourhood of the point p. It is denoted by 𝑁4 𝑝 . Definition 2.4 [6] The 8-neighbours of a point p(x, y) consists of its 4-neighbours together with its four diagonal neighbours (𝑥 + 1, 𝑦 ± 1) and(𝑥 − 1, 𝑦 ± 1). The point p(x, y) together with its 8-neighbours is called the 8-neighbourhood of the point p. It is denoted by N8 (𝑝). Definition 2.5 [1] The LT-neighbours of a point p(x, y) consists of the neighbours 𝑥 − 1, 𝑦 + 1 and (𝑥 + 1, 𝑦 − 1). The point p(x, y) together with its LT-neighbours is called the LTneighbourhood of the point p. It is denoted by 𝐿3 (𝑝). Definition 2.6 The 6-neighbours of a point p(x, y) consists of its 4-neighbours together with the neighbours (𝑥 − 1, 𝑦 + 1) and (𝑥 + 1, 𝑦 − 1). The point p(x, y) together with its 6-neighbours is called the 6-neighbourhood of the point p. It is denoted by 𝑁6 (𝑝). Definition 2.7 The 12-neighbours of a point p(x, y) consists of its 8-neighbours together with the neighbours (𝑥 ± 2, 𝑦) and(𝑥, 𝑦 ± 2). The point p(x, y) together with its 12-neighbours is called the 12-neighbourhood of the point p. It is denoted by 𝑁12 (𝑝).
3. SOME EXISTING FILTERING TECHNIQUES In this section, we provide the definitions of some existing filters. The image processing function in
a spatial domain can be expressed as g(p) = 𝛾(f(p), where 𝛾 is the transformation function, f(p) is the pixel value (gray level value) of the point p(x,y) of input image and g(p) is the pixel value of the corresponding point of the processed image. 3.1 MEAN FILTER [3]
Mean filter is a simple linear filter, intuitive and easy to implement method of smoothing images. This filter reduces the amount of intensity variation between one pixel and the next. It is often used to reduce noise in images. In mean filter, the pixel value of a point p is replaced by the mean of pixel values of 8-neighbourhood of a point ‗p‘. The operation of this filter can be expressed as: 𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 𝑁8 𝑝 }. 3.2 MEDIAN FILTER [1]
The median filter plays an important role in image processing and vision. It is useful for reducing salt and pepper noise in an image. In median filter, the pixel value of a point p is replaced by the median of pixel values of 8-neighbourhood of a point ‘p‘. The operation of this filter can be expressed as: 𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 𝑁8 𝑝 }. 3.3 CENTER WEIGHTED MEAN FILTER [5]
Center weighted mean filter is a filter that gives more weight to the center pixel. This weight corresponds to the size of the kernel. If the kernel is 3x3, then the total number of pixels that will be converting to array for performing sorting will be 11. This filter is defined as 𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝑁8 𝑝 },
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel. 3.4 CENTER WEIGHTED MEDIAN FILTER [5]
Center weighted median filter is a filter that gives more weight to the center pixel. This weight corresponds to the size of the kernel. If the kernel is 3x3, then the total number of pixels that will be converting to array for performing sorting will be 11. This filter is defined as
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11,NOVEMBER-2012 ISSN 2229-5518
147 𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝑁8 𝑝 }
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel.
In the L3 Mean filter, the pixel value of a point p is replaced by the mean of the pixel values of LT-neighbourhood of a point ‗p‘. The operation of this filter can be expressed as 𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 L𝟑 𝑝 }.
4. PROPOSED NEW FILTERING TECHNIQUES
4.6 L3 MEDIAN FILTER
In this section, we will provide the definition of proposed filtering techniques. These filters are not yet applied by the researchers for the removal of speckle noise in Magnetic resonance image.
In the L3 Median filter, the pixel value of a point p is replaced by the median of the pixel values of LT-neighbourhood of a point ‗p‘. The operation of this filter can be expressed as
4.1 N6 MEAN FILTER
𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 L𝟑 𝑝 }.
In the N6 Mean filter, the pixel value of a point p is replaced by the mean of the pixel values of 6-neighbourhood of a point ‗p‘. The operation of this filter can be expressed as 𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 𝑁6 𝑝 }.
4.7 CENTER WEIGHTED N6 MEAN (CWN6 MEAN) FILTER
Center Weighted N6 Mean filter is a filter that gives more weight to the center pixel of the 6- neighbourhood of a point p. This filter is defined as
4.2 N6 MEDIAN FILTER
𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝑁6 𝑝 },
In the N6 Median filter, the pixel value of a point p is replaced by the median of the pixel values of 6-neighbourhood of a point ‗p‘. The operation of this filter can be expressed as
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel. 4.8 CENTER WEIGHTED N6 MEDIAN (CWN6 MEDIAN) FILTER
𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 𝑁6 𝑝 }. 4.3 N12 MEAN FILTER
In the N12 Mean filter, the pixel value of a point p is replaced by the mean of the pixel values of 12neighbourhood of a point ‗p‘. The operation of this filter can be expressed as
Center Weighted N6 Median filter is a filter that gives more weight to the center pixel of the 6- neighbourhood of a point p. This filter is defined as 𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝑁6 𝑝 },
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel.
𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 𝑁12 𝑝 }. 4.4 N12 MEDIAN FILTER
In the N12 Median filter, the pixel value of a point p is replaced by the median of the pixel values of 12-neighbourhood of a point ‗p‘. The operation of this filter can be expressed as 𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 𝑓 𝑝 , 𝑤𝑒𝑟𝑒 𝑝 𝜖 𝑁12 𝑝 }.
4.9 CENTER WEIGHTED N12 MEAN (CWN12 MEAN) FILTER
Center Weighted N12 Mean filter is a filter that gives more weight to the center pixel of the 12neighbourhood of a point p. This filter is defined as 𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝑁12 𝑝 },
4.5 L3 MEAN FILTER IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
148
ISSN 2229-5518
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel.
evaluate the enhancement of Magnetic resonance images. 𝑅𝑀𝑆𝐸 =
4.10 CENTER WEIGHTED N12 MEDIAN (CWN12 MEDIAN) FILTER
Center Weighted N12 Median filter is a filter that gives more weight to the center pixel of the 12- neighbourhood of a point p. This filter is defined as 𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝑁12 𝑝 },
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel. 4.11 CENTER WEIGHTED L3 MEAN (CWL3 MEAN) FILTER
Center Weighted L3 Mean filter is a filter that gives more weight to the center pixel of the LT- neighbourhood of a point p. This filter is defined as
𝑓 𝑖, 𝑗 − 𝑔 𝑖, 𝑗 𝑚𝑛
𝑃𝑆𝑁𝑅 = 20 log10
2
255 𝑅𝑀𝑆𝐸
Here 𝑓(𝑖, 𝑗) is pixel value of original MRI, g (i, j) is the pixel value of enhanced MRI and m and n are the total number of pixels in the horizontal and vertical dimensions of the image. If the value of RMSE is low and the value of the PSNR is high, then the enhancement approach is better. The MRI of brain cancer [11] with speckle noise and filtered MRI of brain cancer image obtained by the proposed filters are compared and analyzed.
𝑔 𝑝 = 𝑚𝑒𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝐿3 𝑝 },
where ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel. 4.12 CENTER WEIGHTED L3 MEDIAN (CWL3 MEDIAN) FILTER
Center Weighted L3 Median filter is a filter that gives more weight to the center pixel of the LT neighbourhood of a point p. This filter is defined as 𝑔 𝑝 = 𝑚𝑒𝑑𝑖𝑎𝑛{ 2 ◊ 𝑓 𝑝𝑐 , 𝑓 𝑝 𝑤𝑒𝑟𝑒 𝑝 ∈ 𝐿3 𝑝 },
and ◊ represents replication operator and 𝑓(𝑝𝑐 ) is gray level value of the center pixel.
5. EXPERIMENTAL RESULT ANALYSIS AND DISCUSSION The proposed filtering techniques have been implemented using MATLAB7.0. The performance of all the twelve new filtering techniques are analyzed and discussed. We use statistical tools Root Mean Square Error (RMSE) and Peak Signal to Noise Ratio (PSNR) to
Table-1 shows the RMSE and PSNR values of different proposed filters for MRI brain cancer image corrupted by speckle noise with variances 0.015, 0.025, 0.035, 0.045, 0.055
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11,NOVEMBER-2012 ISSN 2229-5518
149
Fig1. Shows the images obtained by applying the proposed filtering techniques for the brain cancer MRI with speckle noise of variance 0.015. Chart1. Shows the analysis of RMSE and PSNR values of brain cancer image corrupted by speckle noise of variance 0.015.
MRI. The performance of speckle noise removal by proposed filtering techniques is measured using quantitative performance measures such as RMSE and PSNR. The experimental results indicate that the CWN6 Mean, CWN6 Median, CWN12 Mean, CWN12 Median, CWL3 Mean and CWL3 Median are comparatively better than N6 Mean, N6 Median, N12 Mean, N12 Median, L3 Mean and L3 Median filters respectively and CWL3 Median filter performs significantly better than the other proposed filters as well as better than the Hybrid max filter proposed by Gnanambal et al[1].
REFERENCES [1]
Gnanambal Ilango and R. Marudhachalam, New hybrid filtering techniques for removal of speckle noise from ultrasound medical images, Scientia Magna, vol. 7, No. 1, (2011), 38-53.
[2]
Gnanambal Ilango and R. Marudhachalam, New hybrid filtering techniques for removal of Gaussian noise from medical images, ARPN Journal of Engineering and Applied Sciences,Vol 6, No. 2, (2011), 8-12.
[3]
R. Gonzalez and R. Woods, Digital Image Processing, Adison-Wesley, New York,1992
[4]
Mamta Juneja and Rajni Mohana, An improved Adaptive Median Filtering Method for Impulse Noise Detection, International Journal of Recent Trends in Engineering, No.1, (2009), 274-278.
[5]
R. Marudhachalam and Gnanambal Ilango, Center Weighted Hybrid Filtering Techniques for denoising of medical images, World Congress on Engineering and Technology, (2011), 542-545.
[6]
R. Klette and A. Rosenfeld, Digital Geometry, Kaufmann, San Francisco, 2004.
[7]
A. Rosenfeld, Digital Topology, American Mathematical Monthly, 86 (1979), 621-630
6. CONCLUSION In this work, we have introduced twelve new filtering techniques for removal of speckle noise from medical images. To demonstrate the performance of the proposed techniques, the experiments have been conducted on brain cancer
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
150
ISSN 2229-5518
[8]
K. Thangavel, R. Manavalan, and I. Laurence Aroquiaraj, Removal of Speckle noise from Ultrasound Medical Image based on Special Filters: Comparative Study, International Conference on Graphics, Vision and Image Processing, (2009), 25-32.
[9]
S. Sudha, G. R. Suresh and R. Sukanesh, Speckle noise reduction in Ultrasound Images by Wavelet thresholding based on Weighted variance, International journal of Comp. Theory and Engg, No.1, (2009), 7-12
[10] J. W. Turkey,Nonlinear (nonsuperposable) methods for smoothing data, Proc. Congr. Rec. EASCOM‘74, 1974, 673-681 [11] MRI brain cancer image taken from www.google.com – images – brain – cancer 847 600 x 45
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
151
ISSN 2229-5518
Comprehensive Study on Various Types of Stegnographic Schemes and Possible Steganalysis methods for various Cover Carrier like Image, Text, Audio and Video H. Faheem Ahmed and U. Rizwan Abstract - Steganalysis is a very challenging field because of the scarcity of knowledge about the specific characteristics of the cover media (an image, an audio or video file) that can be exploited to hide information and detect the same. The approaches adopted for steganalysis also sometimes depend on the underlying steganography algorithm(s) used. Index Terms – Stegnography, Steganalysis.
—————————— ——————————
1. STEGNOGRAPHY steganography literally Tcoveredwordwriting as derived from
means Greek steganós (covered) and graptos (writing). Using steganography, one can embed a secret message inside a piece of unsuspicious information and send it without anyone knowing of the existence of the secret message. As the field of steganography has progressed, people have become increasingly interested in being able to detect these hidden messages inside media. The field of steganalysis has emerged to meet this need. Steganalysis can be defined as, ―the art and science of detecting steganography‖. The main goals of steganalysis are to detect steganography and to detect what method (or piece of software) was used to hide the information. HE
Steganography and cryptography are closely related. Cryptography scrambles messages so they cannot be understood. Steganography on the other hand, will hide the message so that they cannot be seen.
Fig. 2. A block diagram of a generic steganographic system
2. IMAGE STEGNOGRAPHIC TECHNIQUES The various image steganographic techniques are: (i) Substitution technique in Spatial Domain: In this technique only the least significant bits of the cover object is replaced without modifying the complete cover object. It is a simplest method for data hiding but it is very weak in resisting even simple attacks such as compression, transforms, etc. 1) Data Hiding by LSB: least-significant-bit 2) Data Hiding by MBPIS: The Multi Bit Plane Image Steganography (MBPIS).
Fig.1 Types of Steganography ——————————————
U. Rizwan is serving in the Department of Mathematics, Islamiah College, Vaniyambadi, India. E-mail:
[email protected] H. Faheem Ahmed is pursuing Ph.D. degree in Computer Science,Islamiah College, Vaniyambadi, India. IJSER © 2012 http://www.ijser.org
3) Data Hiding by MBNS: Multiple-Based Notational System based on human vision sensitivity (HVS).
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
152
ISSN 2229-5518
4) Data Hiding by QIM: Quantization index modulation 5) Data Hiding by PVD: The pixel-value differencing 6) Data Hiding by GLM : Gray level modification (ii)Transform domain technique: The various transform domains techniques are Discrete Cosine Transform (DCT), Discrete Wavelet Trans- form (DWT) and Fast Fourier Transform (FFT) are used to hide information in transform coefficients of the cover images that makes much more robust to attacks such as compression, filtering, etc. (iii) Spread spectrum technique: The message is spread over a wide frequency bandwidth than the minimum required bandwidth to send the information. The SNR in every frequency band is small. Hence without destroying the cover image it is very difficult to remove message completely. (iv) Statistical technique: The cover is divided into blocks and the message bits are hidden in each block. The information is encoded by changing various numerical properties of cover image. The cover blocks remain unchanged if message block is zero. (v) Distortion technique: Information is stored by signal distortion. The encoder adds sequence of changes to the cover and the decoder checks for the various differences between the original cover and the distorted cover to recover the secret message. Some common Image Steganography Technique in Spatial and Transform Domain [146] has been discussed below.
3.
IMAGE STEGNANALYSIS
Image steganography algorithms are more often based on an embedding mechanism called Least Significant Bit (LSB) embedding. Each pixel in an image is represented as a 24-bitmap value, composed of 3 bytes representing the R, G and B values for the three primary colors Red, Green and Blue respectively. A higher RGB value for a pixel
implies larger intensity. For instance, a pixel p represented as FF FF FF is composed of all of these three primary colors at their maximum intensity and hence the color represented by this pixel is white. LSB embedding exploits the fact that changing the least significant bit of each of the three bytes of a pixel would produce only a minor change in the intensity of the color represented by the pixel and this change is not perceptible to the human eye. For example, changing the color values of pixel p to FE FE FE would make the color darker by a factor of 1/256. Steganography algorithms based on LSB embedding differ on the pattern of modification a modification of randomly chosen pixels or modification restricted to pixels located in certain areas of the image. Images can be represented in different formats, the three more commonly used formats are: GIF (Graphics Interchange Format), BMP (Bit Map) and JPEG (Joint Photographic Exchange Group). Each of these image formats behaves differently when a message is embedded in it. Accordingly, there exist different image steganalysis algorithms for each of these three image formats.
4. PALETTE IMAGE STEGNANALYSIS Palette image steganalysis is primarily used for GIF images. The GIF format supports up to 8 bits per pixel and the color of the pixel is referenced from a palette table of up to 256 distinct colors mapped to the 24-bit RGB color space. LSB embedding of a GIF image changes the 24-bit RGB value of a pixel and this could bring about a change in the palette color (among the 256 distinct colors) of the pixel. The strength of the steganographic algorithm lies in reducing the probability of a change in the palette color of the pixel and in minimizing the visible distortion that embedding of the secret image can potentially introduce. The steganalysis of a GIF stego image is conducted by performing a statistical analysis of the palette table vis-à-vis the image and the detection is made when there is an appreciable increase in entropy (a measure of the variation in the palette colors).The change in entropy is maximal when the embedded message is of maximum length.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
153
ISSN 2229-5518
right features, which should not vary across images of different varieties.
5. RAW IMAGE STEGNANALYSIS The Raw image steganalysis technique is primarily used for BMP images that are characterized by a lossless LSB plane.LSB embedding on such images causes the flipping of the two grayscale values. The embedding of the hidden message is more likely to result in averaging the frequency of occurrence of the pixels with the two gray-scale values. For example, if a raw image has 20 pixels with one gray-scale value and 40 pixels with the other grayscale value, then after LSB embedding, the count of the pixels with each of the two gray-scale values is expected to be around 30. It is based on the assumption that the message length should be comparable to the pixel count in the cover image (for longer messages) or the location of the hidden message should be known (for smaller messages).
6. JPEG IMAGE STEGNANALYSIS JPEG is a popular cover image format used in steganography. Two well-known Steganography algorithms for hiding secret messages in JPEG images are: the F5 algorithm and Outguess algorithm. The F5 algorithm uses matrix embedding to embed bits in the DCT(Discrete Cosine Transform) coefficients in order to minimize the number of changes to a message.
7. GENERIC IMAGE ALGORITHMS
STEGNANALYSIS
The generic steganalysis algorithms, usually referred to as Universal or Blind Steganalysis algorithms, work well on all known and unknown steganography algorithms. These steganalysis techniques exploit the changes in certain innate features of the cover images when a message is embedded. The focus is on to identify the prominent features of an image that are monotonic and changes statistically as a result of message embedding. The generic steganalysis algorithms are developed to precisely and maximally distinguish these changes. The accuracy of the prediction heavily depends on the choice of the
8. EVALUATION TOOLS
OF
STEGNANALYSIS
In order to evaluate the steganalysis tools, it is essential that the whole process is forensically sound to ensure the validity of the findings. Therefore, the following are the steps that will be followed throughout the process: 1.Obtain the steganographic and steganalysis tools 2. Verify the tools (to ensure the tools is doing what it claims) 3. Obtain cover images, and generate MD5 hashes 4. Apply steganalysis on cover images, and generate MD5hashes 5. Generate steganographic images, and generate MD5hashes 6. Apply steganalysis on the steganographic image, and generate MD5 hashes In each of the steps where the cover images or the steganographic images are involved, MD5 hashes have been used to verify whether the image has changed in any sense.
9. CONCLUSION In this paper, we have analyzed the steganalysis algorithms available for Image Steganography. In summary, each carrier media has its own special attributes and reacts differently when a message is embedded in it. Therefore, the steganalysis algorithms have also been developed in a manner specific to the target stego file and the algorithms developed for one cover media are generally not effective for a different media. This paper would cater well to providing an overview of the steganalysis algorithms available for images. Image steganalysis algorithms can be classified into two broad categories: Specific and Generic. The Specific steganalysis algorithms are based on the format of the digital image (e.g. GIF, BMP and JPEG formats) and depend on the underlying steganography algorithm used. The Generic image steganalysis algorithms work for any underlying steganography algorithm, but require more complex computational and higher-order statistical analysis. The audio steganalysis algorithms exploit the variations in the
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
154
ISSN 2229-5518
characteristic features of the audio signal as a result of message embedding. Audio steganalysis algorithms that detect the discontinuities in phase (as a result of phase coding), variations in the amplitude (as a result of Echo hiding) and the changes in the perceptual and non-perceptual audio quality metrics as a result of message embedding have been proposed. The video steganalysis algorithms that utilize the temporal redundancies at the frame level and inter-frame level have been observed to be more effective than algorithms based on spatial redundancies. Nevertheless, video steganalysis algorithms that simultaneously exploit both the temporal and spatial redundancies have also been proposed and shown to be effective. In summary, each carrier media has its own special attributes and reacts differently when a message is embedded in it. Therefore, the steganalysis algorithms have also been developed in a manner specific to the target stego file and the algorithms developed for one cover media are generally not effective for a different media. This paper would cater well to providing an overview of the steganalysis algorithms available for the three commonly used domains of steganography. Most of the techniques that can be used on images, can also be applied on audio files. Compressing an audio file with lossy compression will result in loss of the hidden message as it will change the whole structure of a file. Also, several lossy compression schemes use the limits of the human ear to their advantage by removing all frequencies that cannot be heard. This will also remove any frequencies that are used by a steganographic system which hides information in that part of the spectrum.
capable of detecting this with a reasonable rate of success.
REFERENCES [1] Ahmed Ibrahim, Steganalysis in Computer Forensics, Security Research Centre Conferences, Australian Digital Forensics Conference, Edith Cowan University Year 2007. [2] H. Faheem Ahmed and U. Rizwan, An Alternative Technique in Data Embedding, Advanced Materials in Physics, 233-242, 2012. [3] Greg Goth, Steganalysis Gets Past the Hype, IEEE, Distributed Systems Online 1541-4922 © 2005 Published by the IEEE Computer Society Vol. 6, No. 4; April 2005. [4] Guillermito, Steganography: A few tools to discover hidden data. Retrieved September 29, 2007, http://www.guillermito2.net/stegano/tools/ind ex.html. [5] J. Kelley, Terrorist instructions hidden online. Retrieved September 14, 2007, http://www.usatoday.com /tech/news/200102-05-binladen-side.html
Another possible way of removing steganograms is lowering the bitrate of the audio file. In that case, there will be less available space to store hidden data and therefore, at least parts of it will get lost. For video, once more again, the same methods as for images and audio files can be applied to remove hidden information. To defeat the use of signals or gestures however, human insight is still necessary, as computer systems are not yet
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
155
ISSN 2229-5518
k-Stage Fuzzy Transportation Problem Based On Interval Valued Fuzzy Numbers S. Elizabeth and L. Sujatha
Abstract: The transportation problem is a typical problem where a product is to be transported from ‘m’ sources to ‘n’ destinations. In general, crisp transportation problems are solved with the assumption that the supplies, demands and cost parameters are specified in a precise way, but this is not possible in real life situations due to uncertainty in judgments, lack of evidence etc., which gives rise to fuzzy environment and hence fuzzy decision making method is needed here. In this paper, a procedure is proposed for k-stage fuzzy transportation problem. Illustrative example is also included to demonstrate the proposed approach. Index Terms - Fuzzy transportation problem, Interval valued fuzzy numbers, Transportation Network, Decision Maker.
—————————— ——————————
1. INTRODUCTION basic transportation problem was THE originally developed by Hitchcock [4]. It can be modeled as a standard linear programming problem. An Initial basic feasible solution (IBFS) for the transportation problem can be obtained by using the North-west corner rule, Row minima, Column minima, Matrix minima or the Vogel‘s approximation method (VAM). The Modified distribution method (MDM) is useful for finding the optimal solution for the transportation problem. It is not often possible to get relevant precise data for supplies, demands and cost parameters hence fuzzy numbers namely interval valued fuzzy numbers, triangular fuzzy numbers, trapezoidal fuzzy numbers may represent this data. Zimmerman [12] showed that solutions obtained by fuzzy linear programming are always efficient. Subsequently, Zimmermann‘s fuzzy linear programming has developed into several fuzzy optimization methods for solving the transportation problems. Chanas et.al. [1] presented a fuzzy linear programming model for solving transportation problems with crisp cost coefficients and fuzzy supply and demand values. Chanas and Kuchta [2] proposed the concept of the optimal solution for the transportation problem ————————————————
S. Elizabeth is serving in the Department of Mathematics, Auxilium College, Vellore, India. E-mail:
[email protected] L. Sujatha is pursuing Ph.D. degree in Mathematics, Auxilium College, Vellore, India. E-mail:
[email protected]
with fuzzy coefficients expressed as fuzzy numbers, and developed an algorithm for obtaining the optimal solution. Saad and Abbas [10] discussed the solution algorithm for solving the transportation problem in fuzzy environment. Liu and Kao [7] described a method for solving Fuzzy transportation problem (FTP) based on extension principle. Lin [6] introduced a genetic algorithm to solve a transportation problem with fuzzy objective functions. Dinagar and Palanivel [11] investigated FTP, with the aid of trapezoidal fuzzy numbers. Fuzzy modified distribution method is proposed to find the optimal solution in terms of fuzzy method is proposed to find the optimal solution in terms of fuzzy numbers. Pandian and Natarajan [9] proposed a new algorithm namely, fuzzy zero point method for finding a fuzzy optimal solution for a FTP, where the transportation cost, supply and demand are represented by trapezoidal fuzzy numbers. Thus numerous papers have been published in fuzzy transportation problem.
The rest of the paper is organized as follows: In section 2, basic definitions on Interval valued fuzzy numbers are reviewed and some new definitions are coined for the same. In section 3, a procedure is proposed for k-stage transportation problem in fuzzy environment. An example is also illustrated for the proposed approach. Section 4, concludes the paper.
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
156
ISSN 2229-5518 a3
2. PRE-REQUISITES
1. xdx
Definition 1. [5] When interval is defined on real number . This interval is said to be a subset of . The interval valued fuzzy number is denoted by A [a1 , a3 ], a1 , a3 , a1 a3 and its membership function is given as follows: 0 , A ( x ) 1 , 0 ,
x a1 a1 x a 3
Then
a Centroid ( A) C ( A) a1 3 a1
Definition 4. Let A [a1 , a3 ] and B [b1 , b3 ] be two interval valued fuzzy numbers. If C ( A) C ( B) then A is called fuzzy maximum then B and if C ( A) C ( B) then A is called fuzzy minimum then B.
Let A [a1 , a3 ] and B [b1 , b3 ] , a1 , a3 , b1 , b3
A [ a1 , a 3 ]
be
Case (i) If C ( A) 0, C ( B) 0 and if C ( A) 0, C ( B) 0 , A() B
Subtraction Operation ()
A () B a1 , a3 () b1 , b3 a1 b3 , a3 b1
C ( A) 0, C ( B) 0 , A() B
a1 a3 2 (b1 b3 ), 2 (b1 b3 )
2.1 Degeneracy in Fuzzy Transportation Problem
Multiplication Operation () :
a3 a1 2 (b1 b3 ), 2 (b1 b3 )
Case (ii) If C ( A) 0, C ( B) 0 and if
A () B a1 , a3 () b1 , b3 a1 b1 , a3 b3
B [b1 , b3 ] ,
be two interval valued fuzzy numbers. The multiplication Operation on Interval valued fuzzy numbers based on Centroid measure is defined as
two interval valued fuzzy numbers then :
and
a1 , a3 , b1 , b3
A [ a1 , a 3 ]
If a1 = a3, this interval indicates a point A [ a1 , a1 ] = a1 Definition 2. Operations on Interval Valued fuzzy numbers [5] .
2
1.dx
Definition 6. Let
Addition Operation ( )
a1 a 3
Definition 5. Fuzzy zero for interval valued fuzzy number is denoted by OIFN and it is taken as [0,0] (or) [k , k ] where k and δ are positive scalars.
x a3
Fig. 1. Interval valued fuzzy number
A () B a1 , a3 () b1 , b3
a1.b1 a1.b3 a3 .b1 a3 .b3 , a1.b1 a1.b3 a3 .b1 a3 .b3 The following definitions are introduced in this paper. Definition 3. The Centroid Measure for α- cut interval number is given in [3]. The same procedure is followed here for Interval Valued fuzzy number. Let A [a1 , a3 ] be an interval valued fuzzy number.
Fuzzy Initial basic feasible solution is said to be degenerate, if the number of allotted cells is less than m + n – 1, where m is the number of fuzzy origins and n is the number of fuzzy destinations. In such cases, we allocate small quantity namely [, ] satisfying the following conditions to one or more empty cells so that the total number of allotted cells is equal to m + n – 1 independent cells. (i) [, ] 0 (ii) [, ] ( ) [0,0] [0,0] ( ) [, ] [, ] and
IJSER © 2012 http://www.ijser.org
[, ] ( ) [ k , k ] [-k , k ] ( ) [, ] [ k , k ]
where C ( [, ] ) and C ( [-k , k ] )
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
157
ISSN 2229-5518
C ( xij ) 0 i, j
(iii) [ xij(1) , xij(3) ] () [, ]
The following steps are followed for k-stage fuzzy transportation problem.
[ xij , xij ] [ xij , xij ] xij , xij (1)
( 3)
(1)
( 3)
[ xij , xij ]( )[, ] [ xij , xij ] (1)
(iv)
(3)
(1)
(3)
[ x , x ] xij , xij (1) ij
(3) ij
where xij [ xij(1) , xij(3) ] is a quantity transported from ith fuzzy origin to jth fuzzy destination. Thus we obtain the fuzzy initial basic feasible solution as non-degenerate solution.
3. PROCEDURE FOR k-STAGE FUZZY TRANSPORTATION PROBLEM The k-stage fuzzy transportation problem is framed with an assumption that the destinations are unable to receive the quantity in excess due to storage capacity. In such situation after consuming part of the initial product, they are prepared to receive the excess quantity in the successive stages whereas the cost parameters remain the same in all the k-stages. In k-stages the transportation of the product from sources to the destination is done in parallel. Nagoor Gani and Abdul Razak [8] presented two stage cost minimizing fuzzy transportation problem in which supplies and demands are taken as trapezoidal fuzzy numbers with crisp cost. In this section a procedure is presented for k-stage fuzzy transportation problem where the supplies, demands and cost parameters are taken as Interval Valued Fuzzy Numbers. A parametric approach is followed to obtain a fuzzy solution which aim to minimize the sum of the fuzzy transportation cost in k-stages.
Step 1. Construct a fuzzy transportation network with m fuzzy origins (rows) and n fuzzy destinations (columns). Let fuzzy supply ai = [ai(1), ai(3)] be the quantity of commodity available at fuzzy origin i. Let fuzzy demand bj = [bj(1), bj(3)] be the quantity of commodity needed at fuzzy destination j and let fuzzy cost cij = [cij(1), cij(3)] be the cost for transporting one unit of the product from ith fuzzy origin to jth fuzzy destination, where i = 1,2,….,m (Number of rows), j = 1,2,…..,n (Number of columns). Table 3.1. Fuzzy Transportation Problem FO\ FD FO1 FO2
FOm bj
FD1
FD2
...
[c11(1), c11(3)] [c21(1), c 21(3)]
[c12(1), c12(3)] [c22(1), c22(3)]
...
(1)
(1)
[cm1 , cm1(3)] b1=[b1(1), b1(3)]
[cm2 , cm2(3)] b2=[b2(1), b2(3)]
i 1 j 1
ai
...
[c1n(1), c1n(3)] [c2n(1),c2n(3)]
a1=[a1(1), a1(3)] a2=[a2(1), a2(3)]
...
[cmn(1),cmn(3)]
am=[am(1), am(3)]
...
bn=[bn(1),bn(3)]
The given fuzzy transportation problem is said to be balanced if m
ai , ai (1)
( 3)
i 1
b
(1) j
,bj
b
(1) j
,bj
n
j 1
( 3)
( 3)
.
and unbalanced if m
The linear programming model representing the kstage fuzzy transportation problem is given by m n Minimize Z = C (cij ) C ( xij ) (I)
FDn
ai , ai (1)
( 3)
i 1
n
j 1
The unbalanced fuzzy transportation problem is converted into balanced fuzzy transportation problem as follows:
subject to the constraints n
If
C ( xij ) C ( a i )
j 1 m
C ( xij ) C (b j )
i 1
for i= 1,2,…..,m (Row sum)
m
ai , ai
i 1
for j= 1,2,…..,n (Column sum)
(1)
( 3)
b n
j 1
(1) j
( 3)
,bj
then the dummy column with cost parameters [0,0] or [k , k ] , where k and δ are positive
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
158
ISSN 2229-5518
scalars, is introduced which will provide for the excess demand. If m
b n
ai , ai (1)
( 3)
i 1
j 1
(1) j
( 3)
,bj
then the dummy row with cost parameters [0,0] or [k , k ] where k and δ are positive scalars, is introduced which will provide for the excess supply. First we have to check whether the given Fuzzy Transportation Problem is balanced. If so, divide it into k-stages as follows: 1- stage Minimize z1
m
n
i 1
j 1
C (cij )
n
j 1
If ai = [ai(1), ai(3)] , bj = [bj(1), bj(3)] , cij = [cij(1), cij(3)] then
Ai if * Ai Ai if * value and Ai
ai(1) ai( 3) C ( ai ) 2
xij1 c1 C (b j )
subject to the constraints xij1
where xij [ xij(1) , xij(3) ] is a quantity transported from ith fuzzy origin to jth fuzzy destination. Here the optimal parameters are obtained using centroid measure as follows:
b b (1) j
B j if * B j B j if value and B*j
( 3) j
2
Ai1 for i 1,2,..........., m (Row sum)
Ai
is an integer
Ai is a decimal is an integer number
Bj
is an integer
B j is a decimal is an integer number
Similarly,
m
xij1
i 1
j 1,2,..........., n (Column
B1j for
sum)
xij1 0 i, j
2- stage Minimize z 2
c c (1) ij
C (cij ) m
n
i 1
j 1
C (cij )
( 3) ij
2
xij 2 c2
Cij if Cij is an integer * Cij Cij if Cij is a decimal * value and Cij is an integer number *
C ( ai ) Ai or Ai , i 1 to m
subject to the constraints n xij 2 Ai2 for i 1,2,..........., m (Row sum)
*
C (b j ) B j or B j , j 1 to n
and
j 1
m
xij 2
i 1
B2j for
j 1,2,..........., n (Column
sum)
Now Ai or Ai* are divided into k- parts namely Ai1 , Ai 2 , ....., Aik
xij2 0 i, j
*
(or) *
m
n
i 1
j 1
C (cij )
*
xijk ck
j 1,2,..........., n (Column
xijk 0 i, j
xij(1) xij(3) 2
X ij i, j
*
*
*
*
B j or B j
m
n
m
n
i 1
j 1
i 1
j 1
Ai1 B1 j ,....., Aik Bkj
sum)
. Also
.
If not, that is if m
n
m
n
i 1
j 1
i 1
j 1
Ai1 B1 j ,....., Aik Bkj
xij1 xij 2 ... xijk C ([ xij(1) , xij(3) ]) C ( xij )
*
Similar procedure follows for
j 1
Bkj for
*
*
A11 A12 ...... A1k A1 ,......, Am1 Am 2 ...... Amk Am
subject to the constraints n xijk Aik for i 1,2,..........., m (Row sum) i 1
*
A11 A12 ..... A1k A1 ,......., Am1 Am 2 ....... Amk Am
k- stage Minimize z k
m
*
Ai1 , Ai 2 ,......, Aik ,
where
xijk
(or)
,
then dummy row with cost parameter zero is introduced which will provide for the excess supply. IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
159
ISSN 2229-5518 m
n
m
n
i 1
j 1
i 1
j 1
Table 3.3. Centroid Measure for
Ai1 B1 j ,....., Aik Bkj
If
FO \ FD FO1 FO2 FO3 C (bj)
then dummy column with cost parameter zero is introduced which will provide for the excess demand. But note, most probably the divided values are chosen such that the FTP in all the kstages are balanced. Step 2. Calculate Fuzzy initial basic feasible solution using VAM and the fuzzy optimal solution using MDM for k-stages.
Here 3
it
is
taken
as
FD2
FD3
FD4
C (ai)
2 10 7 B1=4
2 8 6 B2=3
2 5 6 B3=4
1 4 8 B4=4
A1=3 A2=7 A3=5 15
ai , ai (1)
( 3)
i 1
Step 3. Calculate minimum fuzzy transportation cost z1 , z 2 ,......, z k from fuzzy optimal solution in k-stages and respectively.
FD1
b 4
j 1
3
4
i 1
j 1
(1) j
( 3)
,bj
=[-26,56]
C (a i ) C (b j ) 15 .
c1 , c2 ,......, ck Hence it is a balanced FTP. Let k = 3
Step 4. Declare c1 c2 ...... ck c as the fuzzy optimal value of the fuzzy transportation problem (I) .
1-Stage. Table 3.4. Fuzzy IBFS using VAM FO\ FD FO1
4. ILLUSTRATIVE EXAMPLE Construct a fuzzy transportation network where nodes denote the fuzzy origin (FO) and fuzzy destinations (FD), edges denote the fuzzy cost.
FO2 FO3 B1j
FD1
FD2
FD3
FD4
Ai1
2 1 10 7 B11=1
2 8 6 1 B12=1
2 5 1 6 B13=1
1 4 1 8 B14=1
A11=1 A21=2 A31=1 4
Table 3.5. Fuzzy Optimal Solution FO\ FD FO1
FD1
FD2
2
2 1
FO2
10
FO3
7
FD4
2
1 -
5 -
6 -
4 1
6 1
FO\ FD
FO2 1
8 -
FO1
FO3 -
Minimize z1 C11 x111+ C12 x121+ C14 x141+
Table 3.2. Fuzzy Initial Table FO\ FD FO1 FO2 FO3 bj
8 -
Fig. 2. Fuzzy Transportation Network
FD3
FD1
FD2
FD3
FD4
ai
C23 x231+ C24 x241+ C32 x321
[-2,6] [4,16] [3,11] [-11,19]
[-2,6] [3,13] [2,10] [-3,9]
[-2,6] [2,8] [2,10] [-13,21]
[-1,3] [1,7] [3,13] [1,7]
[-3,9] [-3,17] [-20,30] [-26,56]
= 2 1 2 1 5 1 4 1 6 1
IJSER © 2012 http://www.ijser.org
= 2+5+4+6+3 17 3 17 c1
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
160
ISSN 2229-5518
2 1 5 1 4 2 7 1 6 1 6 1
2-Stage.
34 c3
Table 3.6. Fuzzy IBFS using VAM FO\ FD FO1
FD1
FD2
2
2
10
5
B21=1
-
A12=1
1
A22=2
B24=1
A32=1 4
1 6
1 B22=1
Minimize Z = c1 c2 c3 = 17 + 17 + 34 = 68 = c
4
6
B2j
-
8
7
Ai2
1
-
FO3
FD4
2
1 FO2
FD3
Therefore the optimal value of the objective function of the fuzzy minimum cost transportation problem is
8 -
B23=1
For the sake of verification, calculating xij1 xij 2 ...... xijk = Xij
Table 3.7. Fuzzy Optimal Solution FO\ FD FO1
FD1
FD2
2
2
10 7
1 -
8
5
FO3
FD4
2
1 FO2
FD3
1
6
6
-
FO\ FD
4
-
FO1
from all k-stages for i=1,2,….,m; j=1,2,…..,n which is given in the below table 3.9
FO2
Table 3.9. Table for verification
1 8
1
-
(1)
FO3
FO\ FD FO1
-
FD1
FD2
2
2 3
Minimize z 2 C11 x112+ C12 x122+ C14 x142 + C23 x232+ C24 x242+ C32 x322 = 2 1 2 1 5 1 4 1 6 1 = 2+5+4+6+3 17 3 17 c2
FO2
10
C (bj)
5 -
FO\ FD FO1 FO2 FO3 B3j
FD1 2 1 10 7 1 B31=2
FD2 2
FD3
FD4
2 -
8
5 -
Ai3 -
A13=1
2
A23=3 A33=3 7
2
A1=3
4 3
7
6
6
1 B1= 4
3 B2= 3
1 B3= 4
A2=7 4 8 B4= 4
A3=5 15
2 3 2 2 1 2 5 3 4 4 7 1 6 3 6 1
4 1
Minimize Z = C11 X11+ C12 X12 + C14 X14 + C23 X23 + C24 X24+ C31 X31 + C32 X32 + C33 X33
1 -
C (ai)
1 -
3- Stage. Table 3.8. Fuzzy IBFS using VAM
FD4
2 2
8 -
FO3
FD3
6
6
8
1 B32=1
1 B33= 2
B34=2
68
Results and Discussions.
Here Fuzzy IBFS given in table 3.8 is an optimal solution Minimize z 3 C11 x113+ C23 x233+ C24 x243 + C31 x313+ C32 x323+ C33 x333
The fuzzy optimal solution using fuzzy VAM and fuzzy optimality test for Table 3.2 is given in below Table 3.10 The general linear programming model representing the fuzzy transportation problem for table 3.1 is given by
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
161
ISSN 2229-5518
Minimize Z = [cij(1) , cij(3) ] () [ xij(1) , xij(3) ]
=[15,121]
subject to the constraints,
C Z 68 0
m
n
i 1 j 1
n
[x
j 1
m
[x
i 1
(1) ij
(1) ij
,x
,x
( 3) ij ]
( 3) ij ]
[a
(1) i
(1) [b j
,a
( 3) i
] for i 1,2,..........., m
Hence as given in Step 1, most probably the divided values are chosen such that the FTP in all the k – stages are balanced so that the solution obtained for k-stage FTP (equation (1)) coincides with the solution obtained using fuzzy VAM and fuzzy optimality test (equation (2)). If not, they are approximately equal.
( 3) j
, b ] for j 1,2,..........., n
[ xij(1) , xij(3) ] 0 i, j Table 3. 10. Fuzzy Optimal Solution FO\ FD FO1
FD1
FD2
FD3
FD4
[-2,6]
[-2,6]
[-2,6]
[-1,3]
[-3,9] [4,16]
[3,13]
[2,8]
[1,7]
[-3,9]
FO2
[3,11]
[2,10]
[-4,10] [2,10]
[1,7] [3,13]
[-3,17]
FO3
[-8,10]
[-3,9]
[-9,11]
-
[-20,30]
[-11,19]
[-3,9]
[-13,21]
[1,7]
[-26,56]
bj
ai
5. CONCLUSION
The general linear programming model representing the fuzzy transportation problem for table 3.1 is given by m
(2)
In Today‘s highly competitive market, the organization or agency should plan their work in such a way that they should create and deliver the products to customers in a cost – effective manner. Fuzzy Transportation models play a vital role in solving these types of problems. In this paper, we developed a method for finding the fuzzy optimal solution for k-stage fuzzy transportation problem. We conclude that the proposed method is very easy to understand and provide a powerful framework to meet the challenging problems in real life situations.
n
Minimize Z = [cij(1) , cij(3) ] () [ xij(1) , xij(3) ]
REFERENCES
i 1 j 1
subject to the constraints, n
(1)
[ xij
j 1
m
[1] Chanas, S., Kolodziejckzy, W., and Machaj, A.A., ―A Fuzzy approach to the transportation problem‖, Fuzzy sets and Systems, vol. 32, pp. 1-11, 1989.
, xij(3) ] [ai(1) , ai(3) ] for i 1,2,..........., m
(1)
( 3)
(1)
( 3)
[ xij , xij ] [b j , b j ]
i 1
for
j 1,2,..........., n
[ xij(1) , xij(3) ] 0 i, j For the table 3.10, transportation cost is
the
fuzzy
minimum
Minimize Z 2, 6()3, 9( )2, 8()4,10( )1, 7() 1, 7 ( ) 3,11()8,10( )2,10()3, 9( )2,10()9,11
=
6,18() 6,24() 4,28() 3,11() 6,30() 2,10
[2] Chanas, S., and Kuchta, D., ―A concept of the optimal solution of the transportation problem with fuzzy cost coefficient‖, Fuzzy Sets and Systems, vol. 82, pp. 299 - 305, 1996. [3] Elizabeth. S and Sujatha. L., ―Fuzzy Critical path in a network‖, in: proceedings of the International Conference on Mathematical Modeling and Applied Soft Computing, vol.1, pp. 97-108, July 11-13, 2012. [4] Hitchcock, F.L., ―The distribution of a product from several sources to numerous
IJSER © 2012 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 3, ISSUE 11, NOVEMBER -2012
162
ISSN 2229-5518
localities‖, Journal of Mathematical Physics, vol. 20, pp. 224-330, 1941. [5] Kwang. H. Lee, ― First Course on Fuzzy Theory and Applications‖, Springer (India) Private Limited, 2005.
[6] Lin, F.T., ―Solving the transportation problem with fuzzy coefficients using genetic algorithms‖, in : proceeding IEEE International Conference on Fuzzy Systems, pp. 20 – 24, 2009. [7] Liu, S.T., and Kao, C., ―Solving fuzzy transportation problems based on extension principle‖, European Journal of Operational Research, vol. 153, pp. 661 – 674, 2004.
[9] Pandian, P., and Natarajan, G., ―A new algorithm for finding a fuzzy optimal solution for fuzzy transportation problems‖, Applied Mathematical Sciences, vol. 4, pp. 79 – 90, 2010. [10] Saad, O.M., and Abbas, S.A., ―A parametric study on transportation problem under fuzzy environment‖, The Journal of Fuzzy Mathematics, vol. 11, pp. 115 – 124, 2003. [11] Stephen Dinagar, D., and Palanivel, K., ―The Transportation problem in Fuzzy Environment‖, International Journal of Algorithms, Computing and Mathematics, vol. 2, pp. 65 – 71, 2009. [12] Zimmermann, H.J., ―Fuzzy programming and
[8] Nagoor Gani, A., and Abdul Razak, K., ―Two Stage Fuzzy Transportation Problem‖, Journal of Physical Sciences, vol. 10, pp. 63 – 69, 2006.
IJSER © 2012 http://www.ijser.org
linear programming with several objective function‖, Fuzzy Sets and Systems, vol. 1, pp. 45 – 55, 1978.



























![Queueing Models of Call Centers - Semantic Scholar [PDF]](https://m.moam.info/img/260x300/queueing-models-of-call-centers-semantic-scholar-p_64bae4c8098a9ebe058b45a5.jpg)